Design, Fabrication, and Testing of a Novel 3D 3-Fingered Electrothermal Microgripper with Multiple Degrees of Freedom


Abstract
:1. Introduction
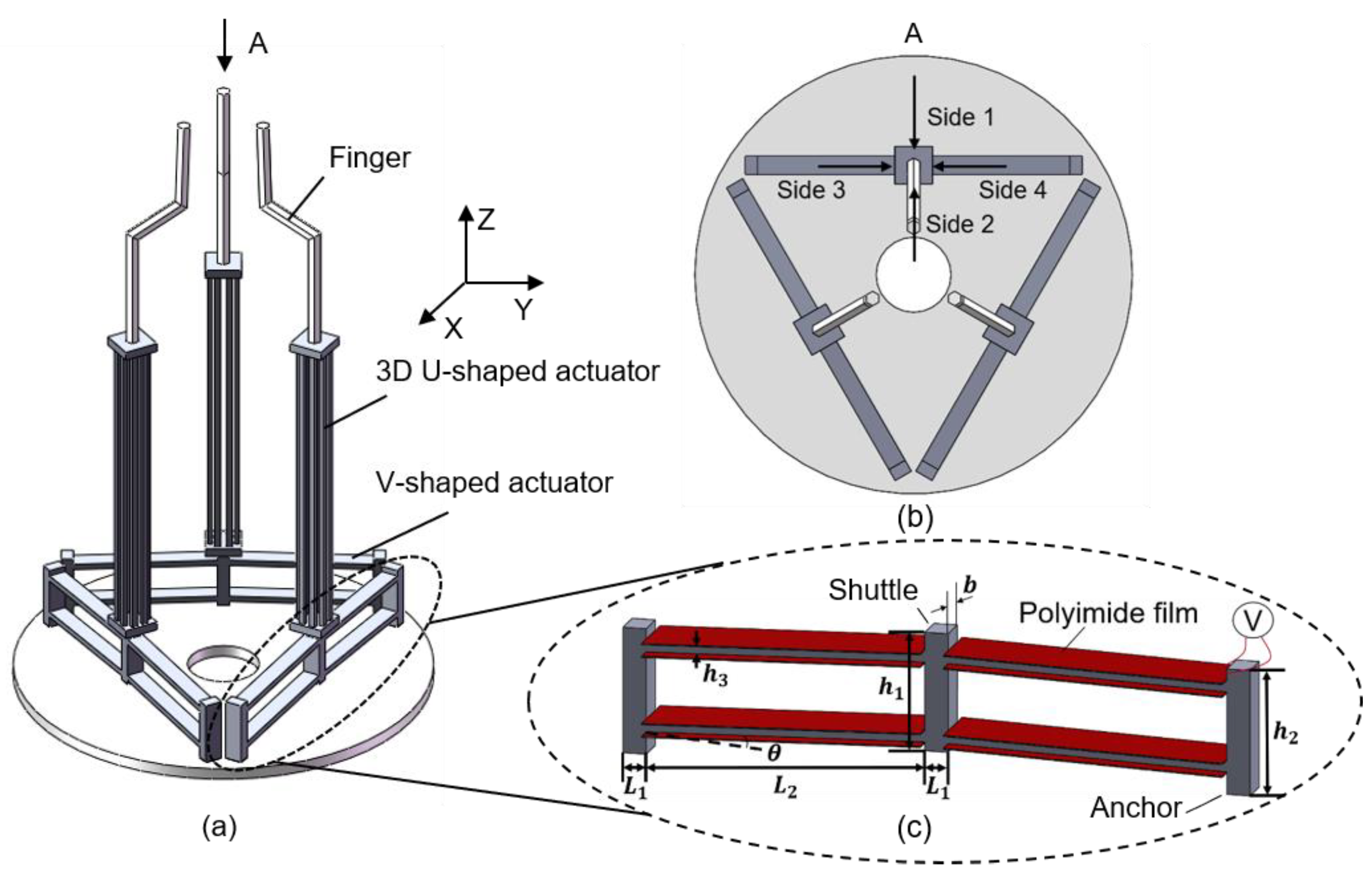
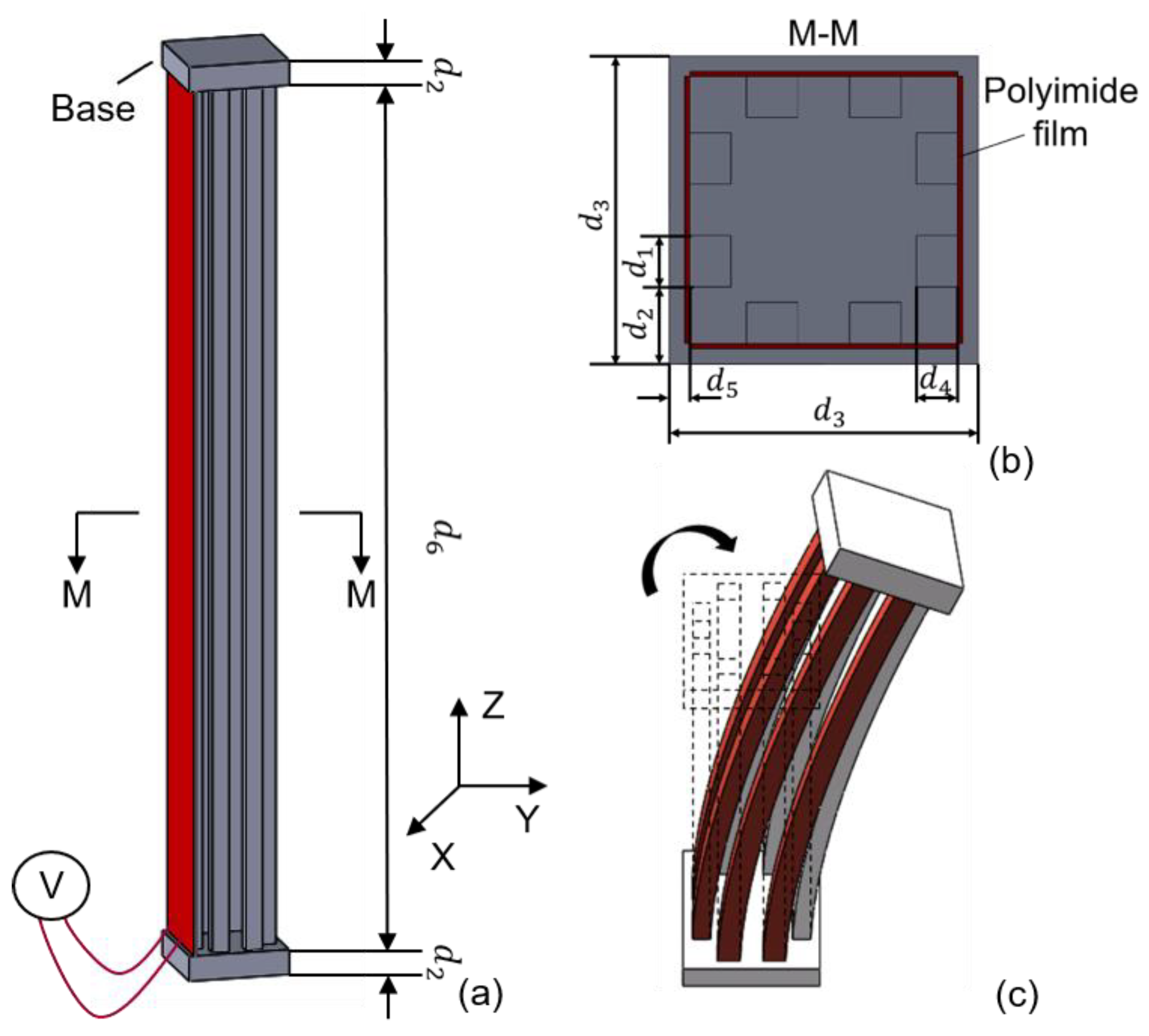
2. Structural Design and Fabrication
3. Experimental Setup and Testing
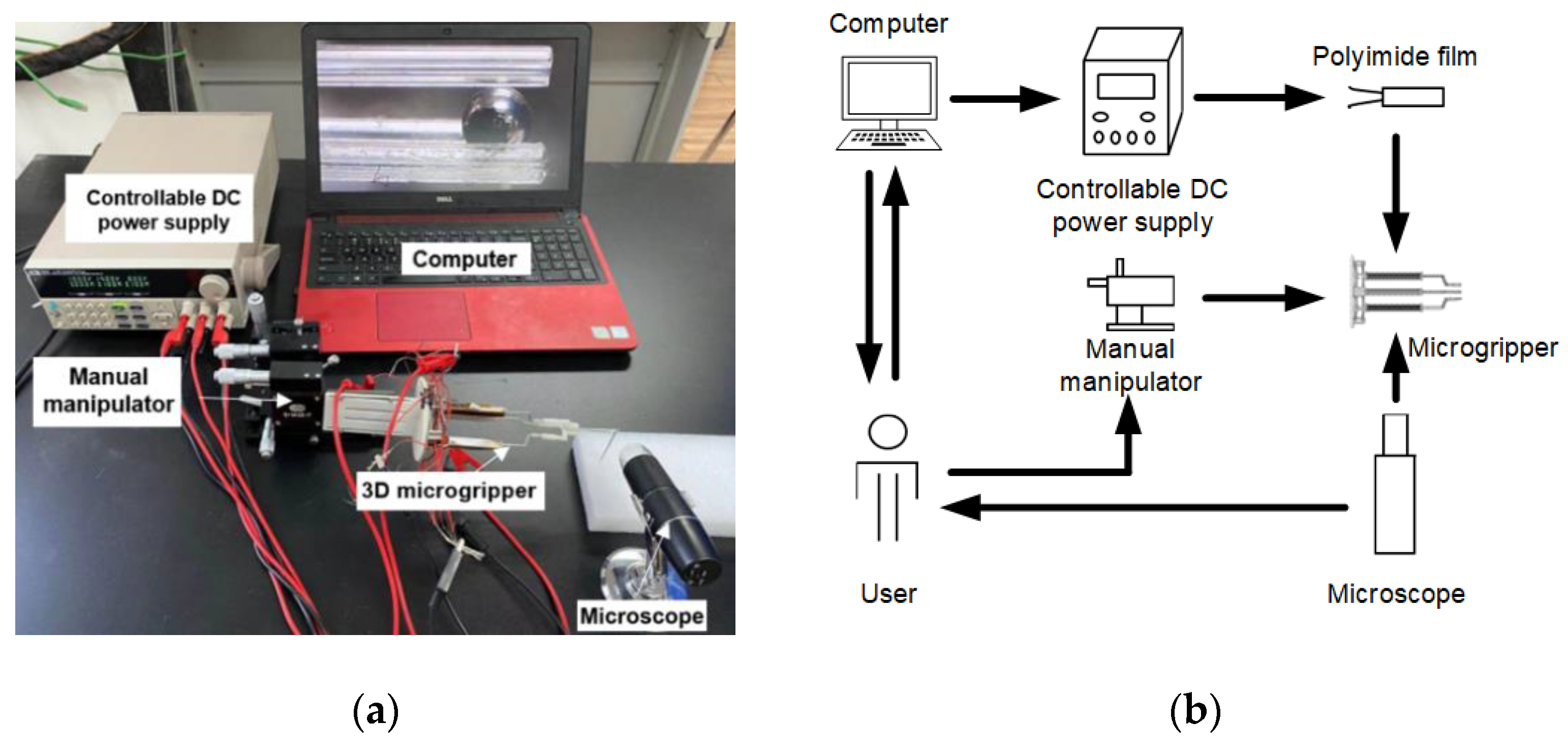
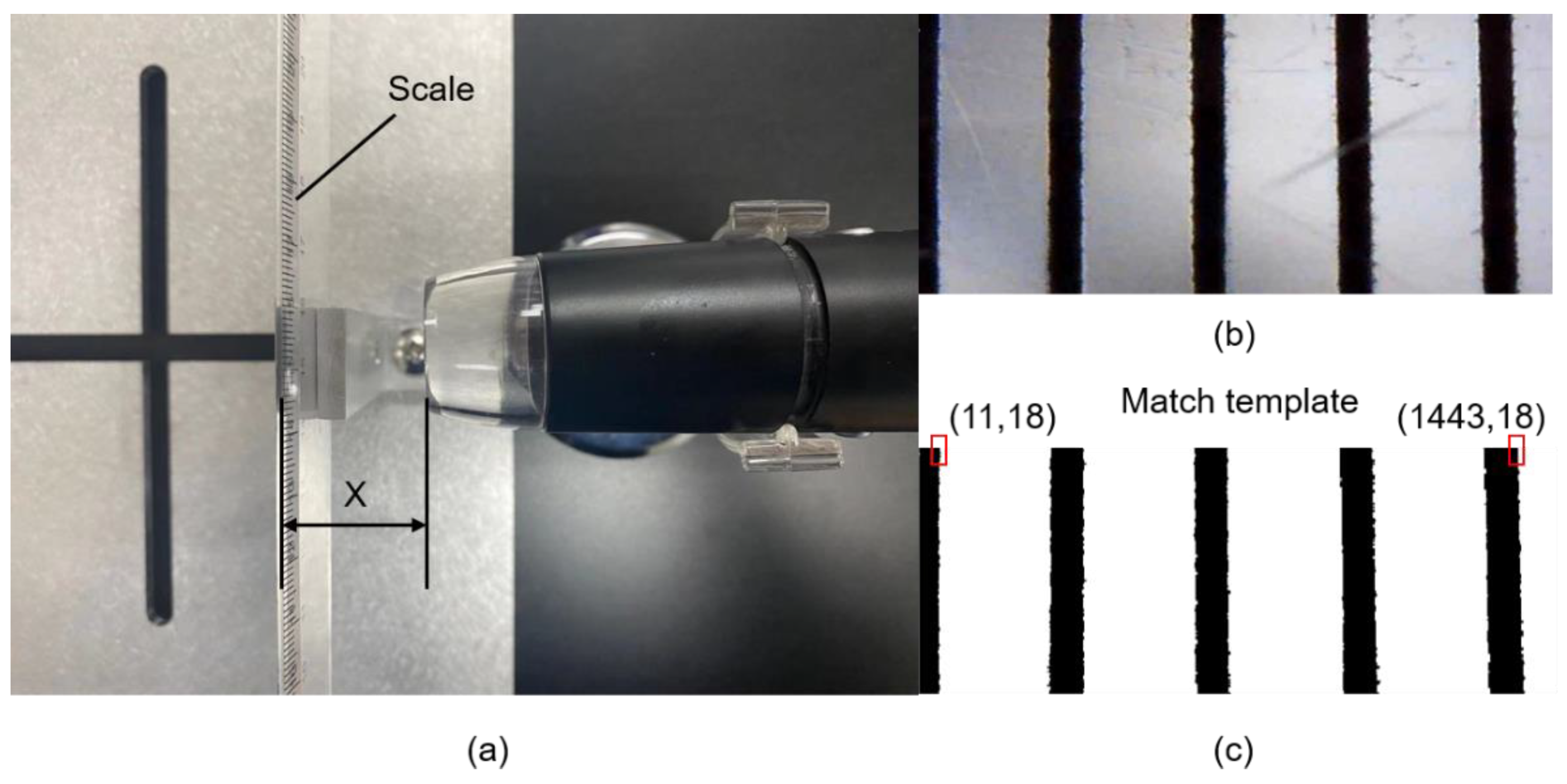
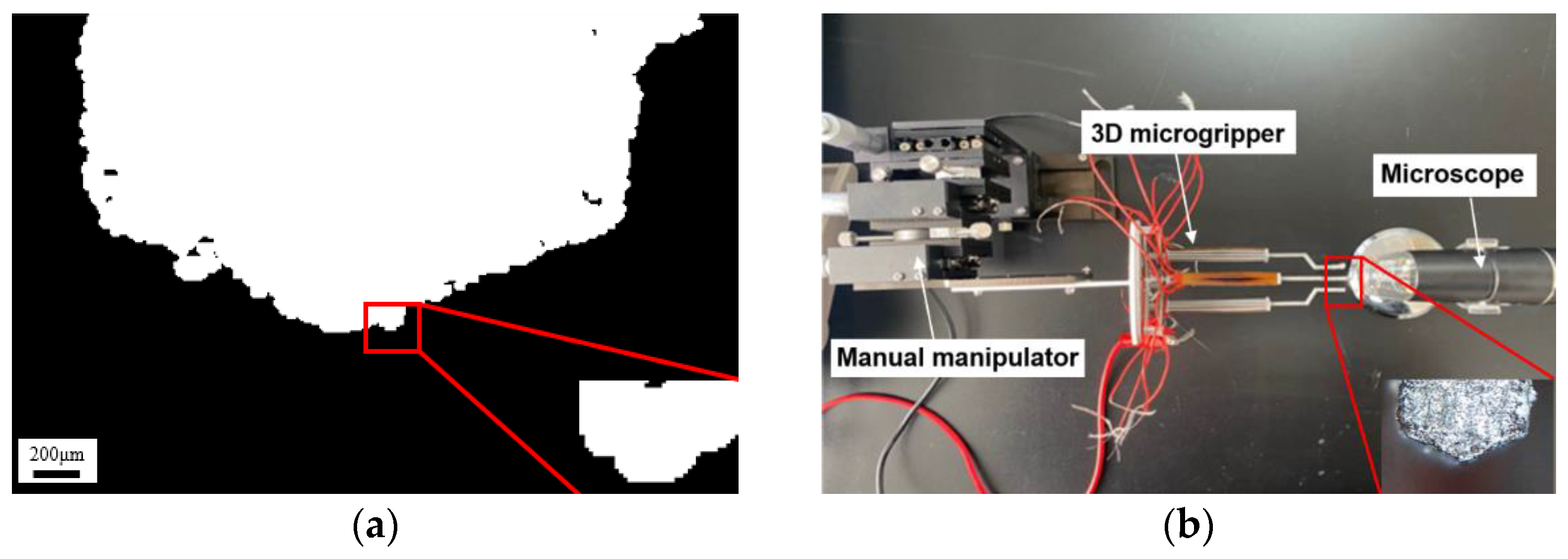
3.1. Experimental Setup
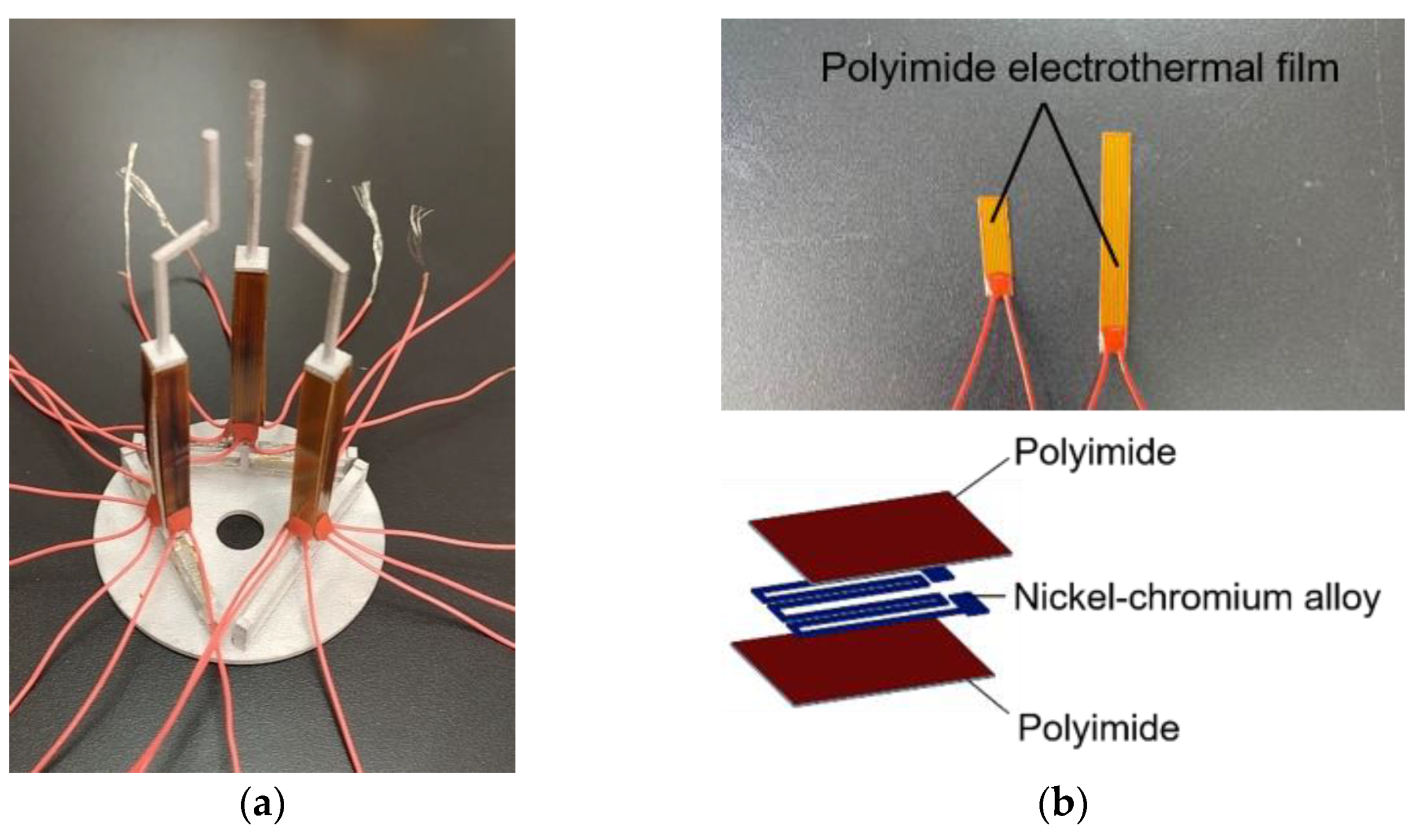
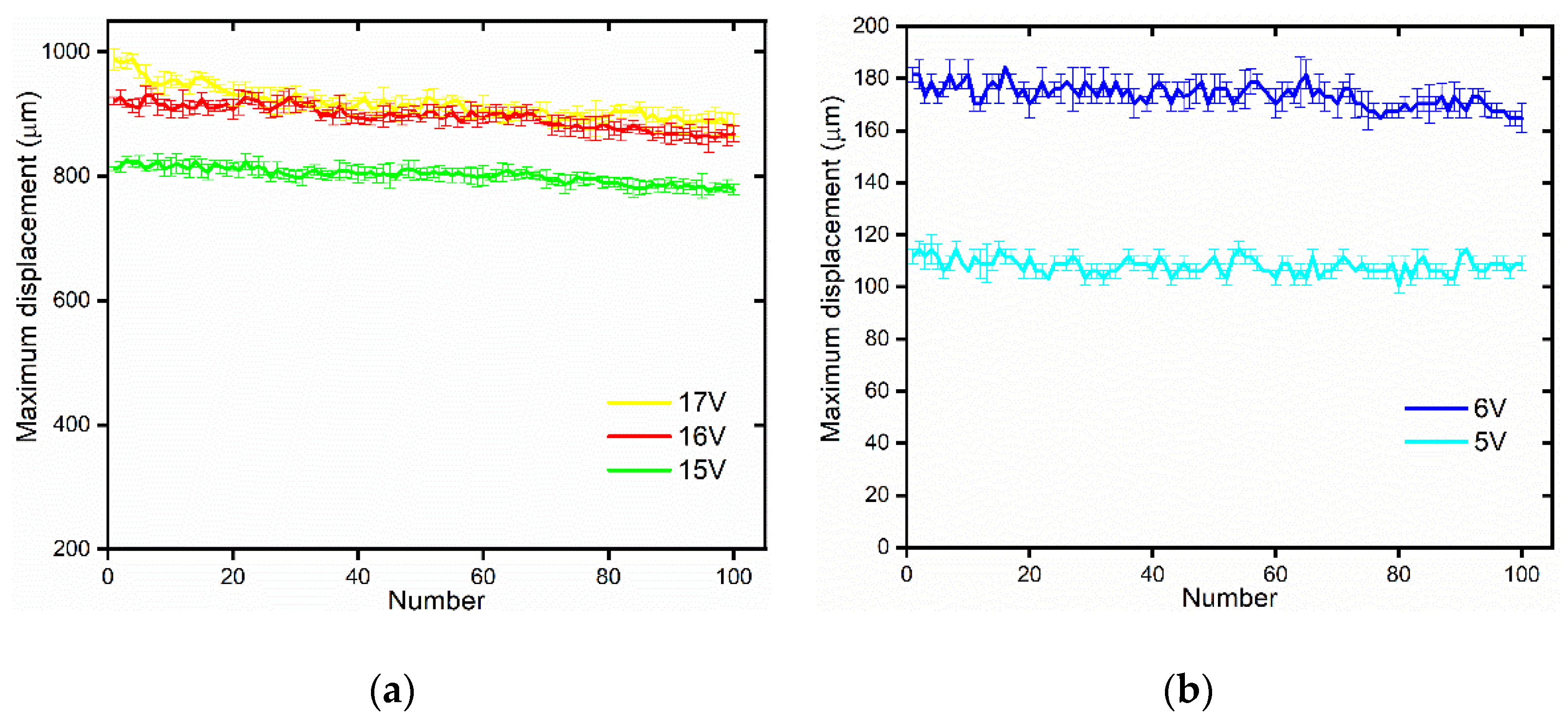
3.2. Durability Testing of the Polyimide Electrothermal Film
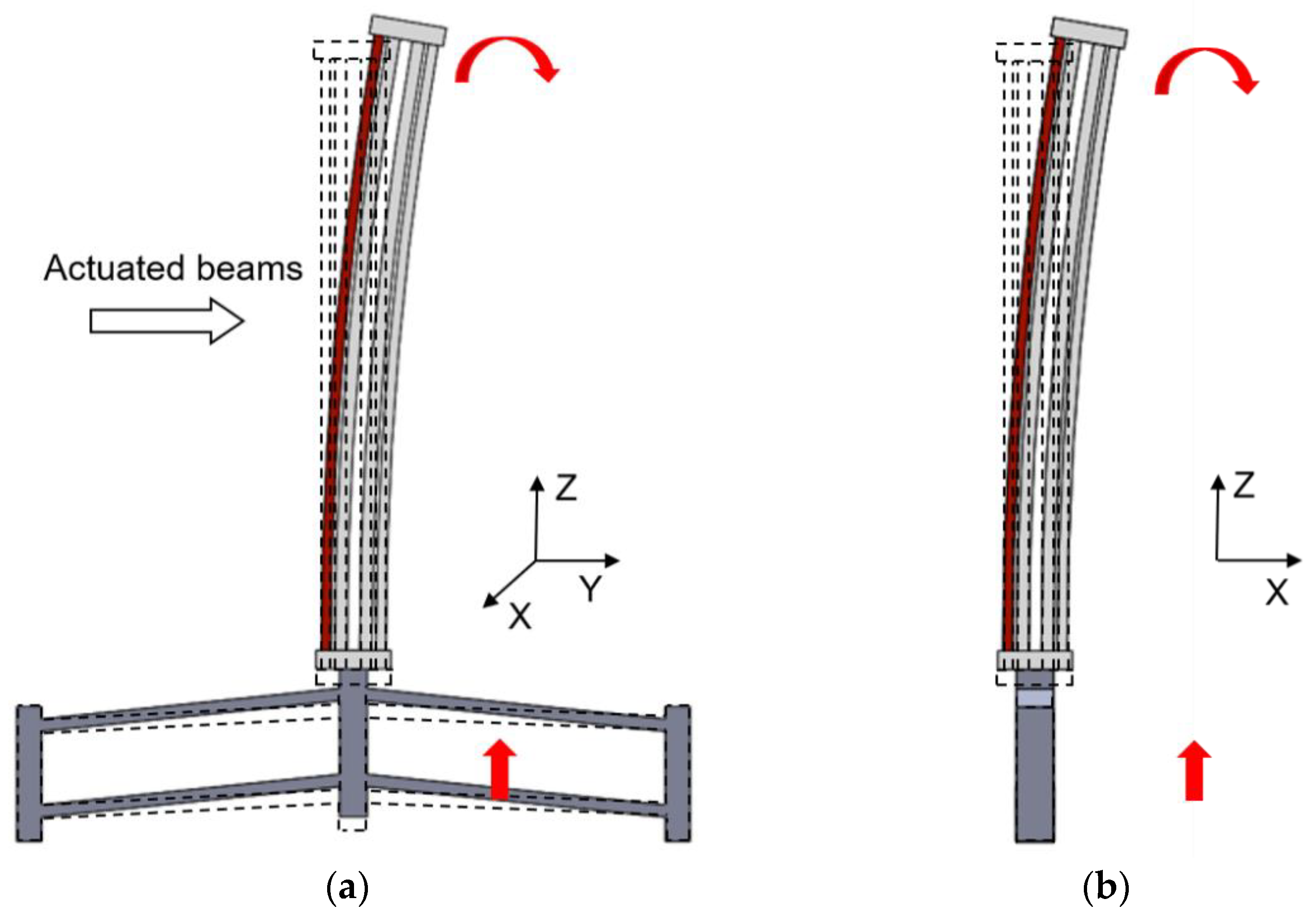
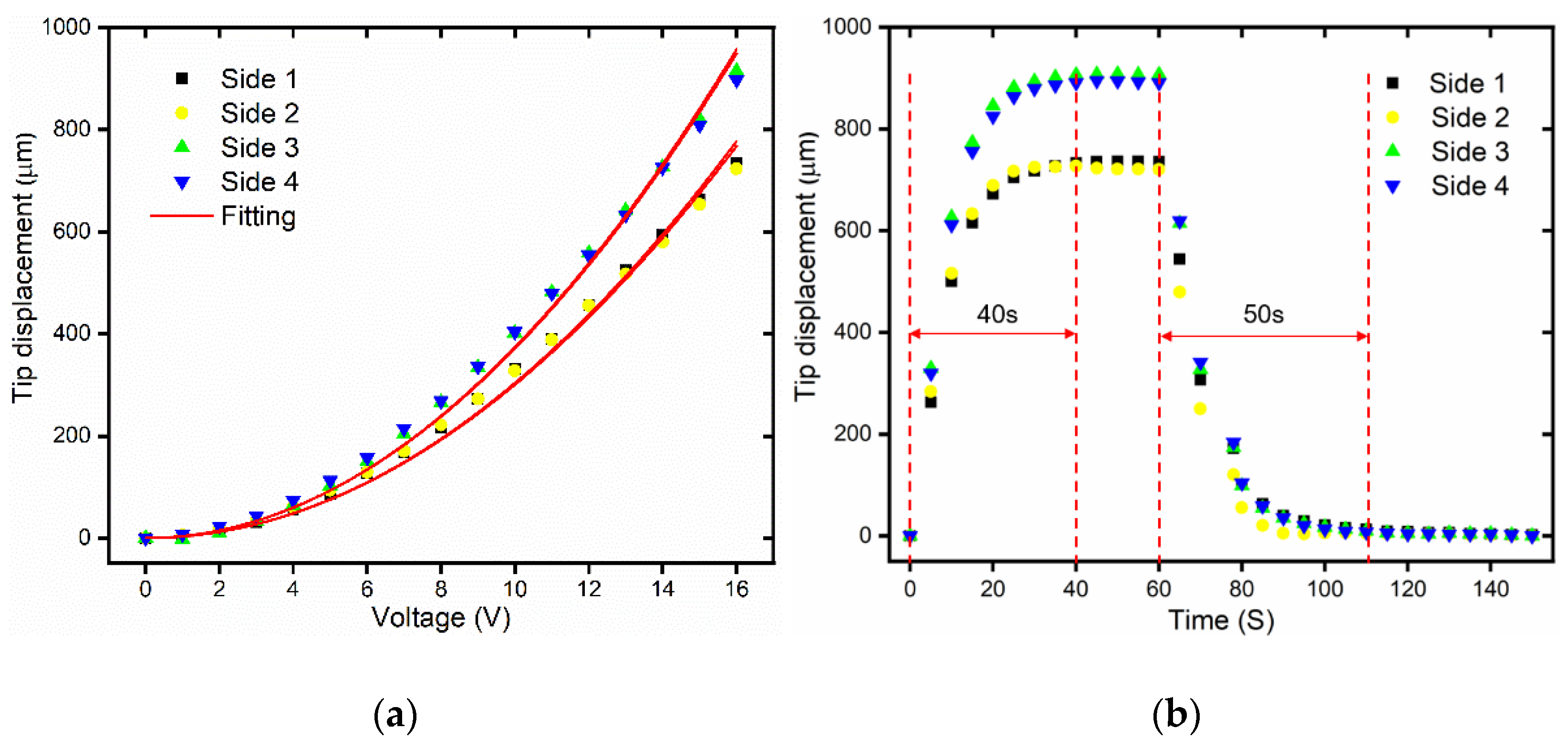
3.3. Static and Dynamic Testing of the 3D U-Shaped Actuator
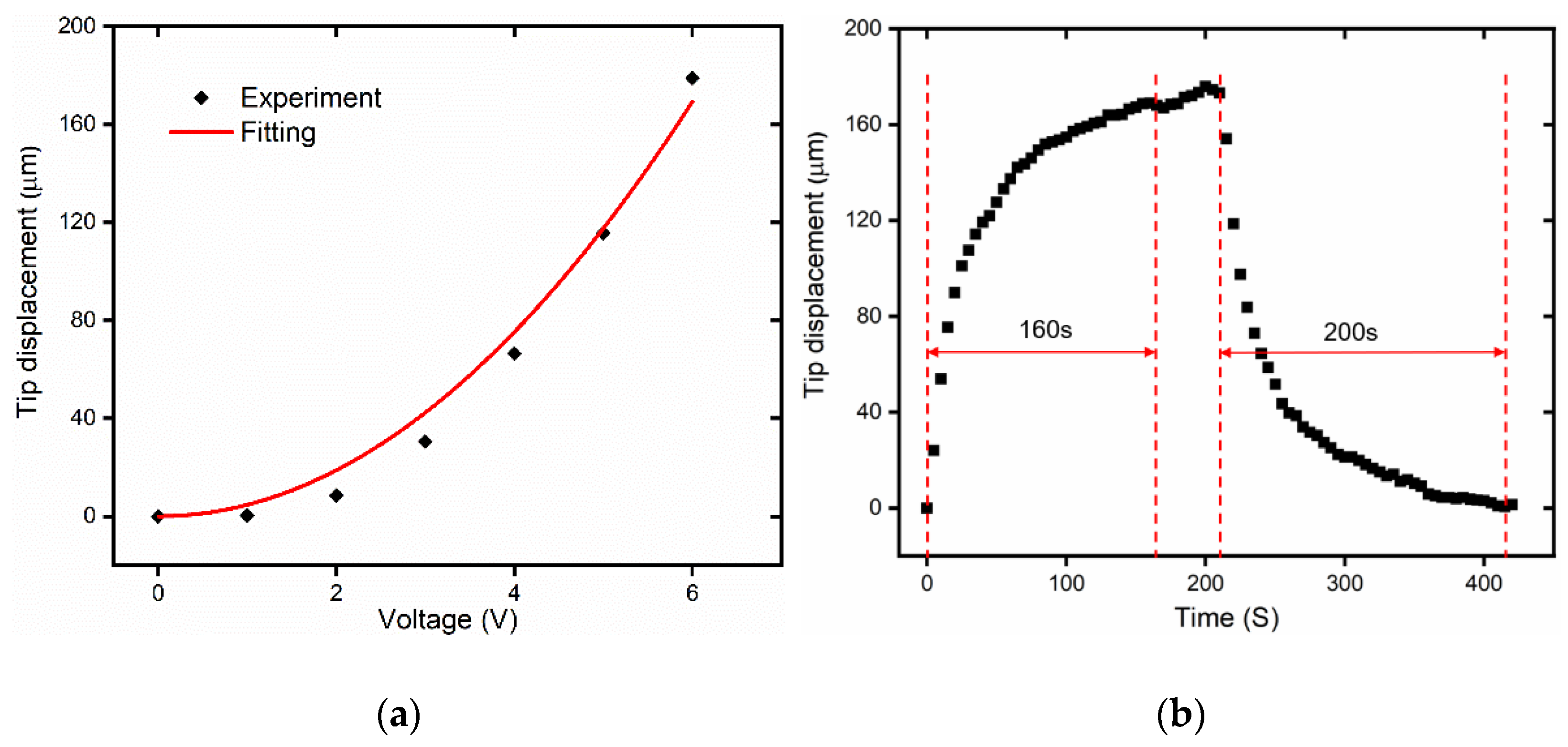
3.4. Static and Dynamic Testing of the V-Shaped Actuator
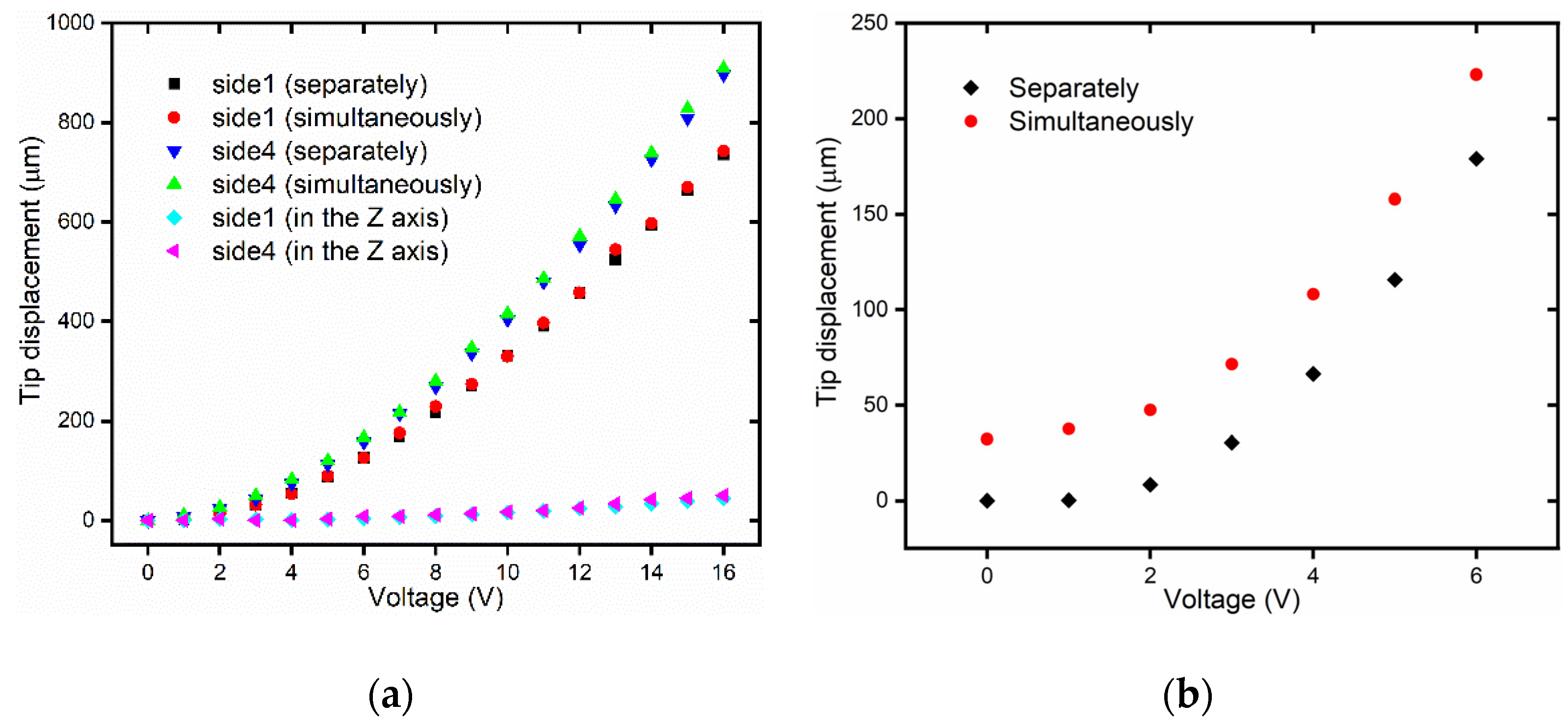
3.5. Testing of the U-Shaped Actuator and the V-Shaped Actuator simultaneously
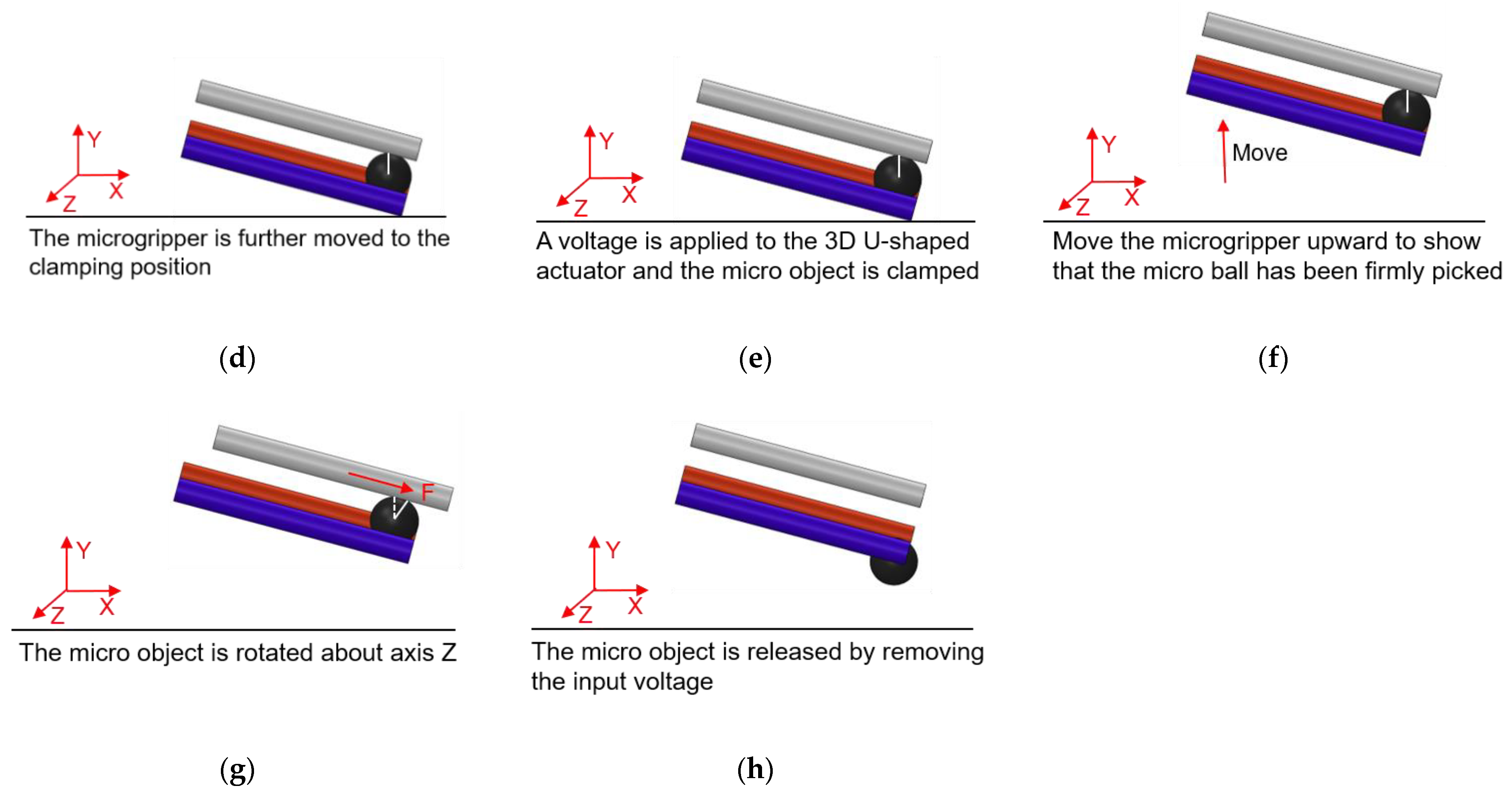
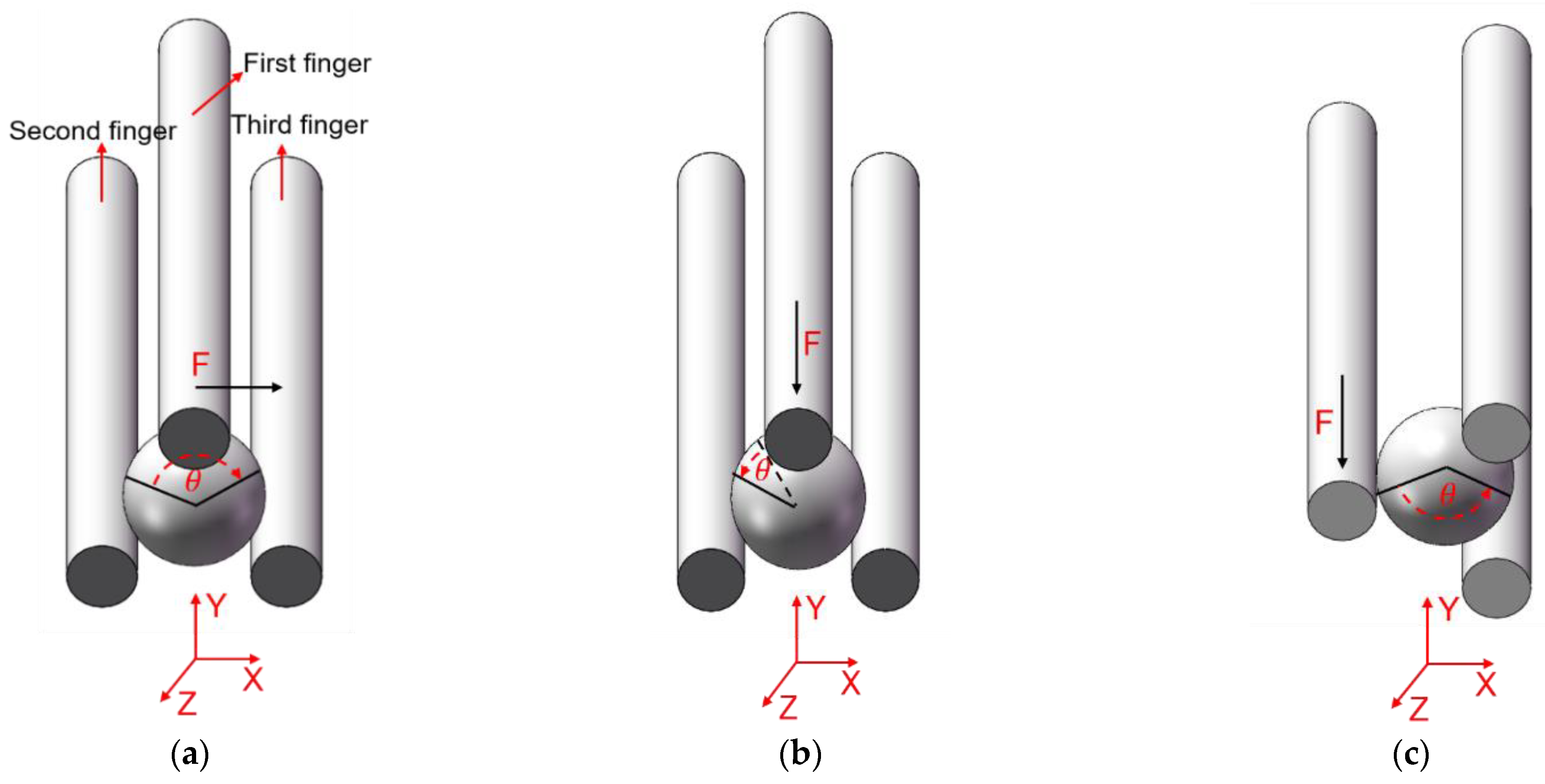
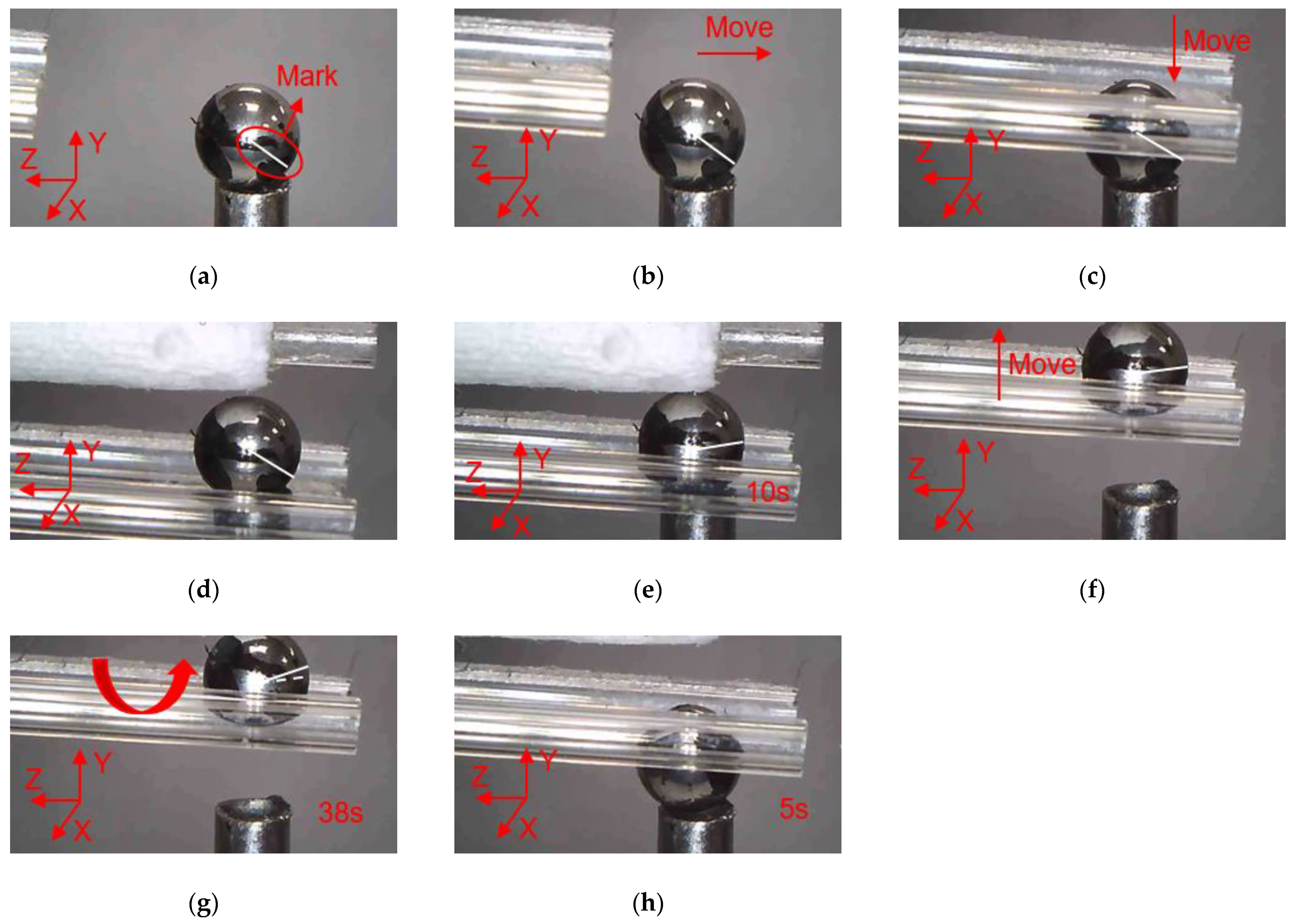
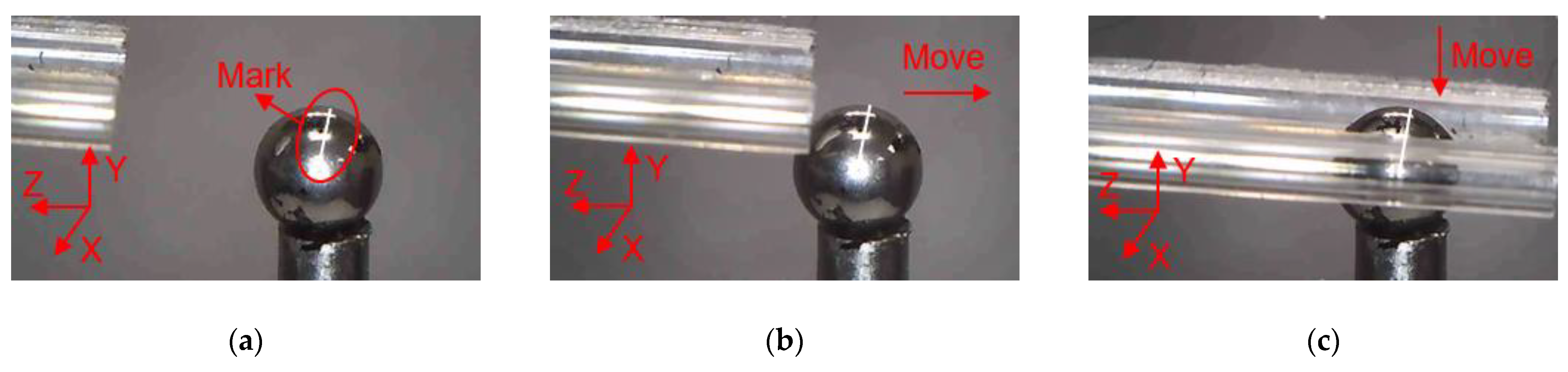
4. Micro-Manipulation Experiments
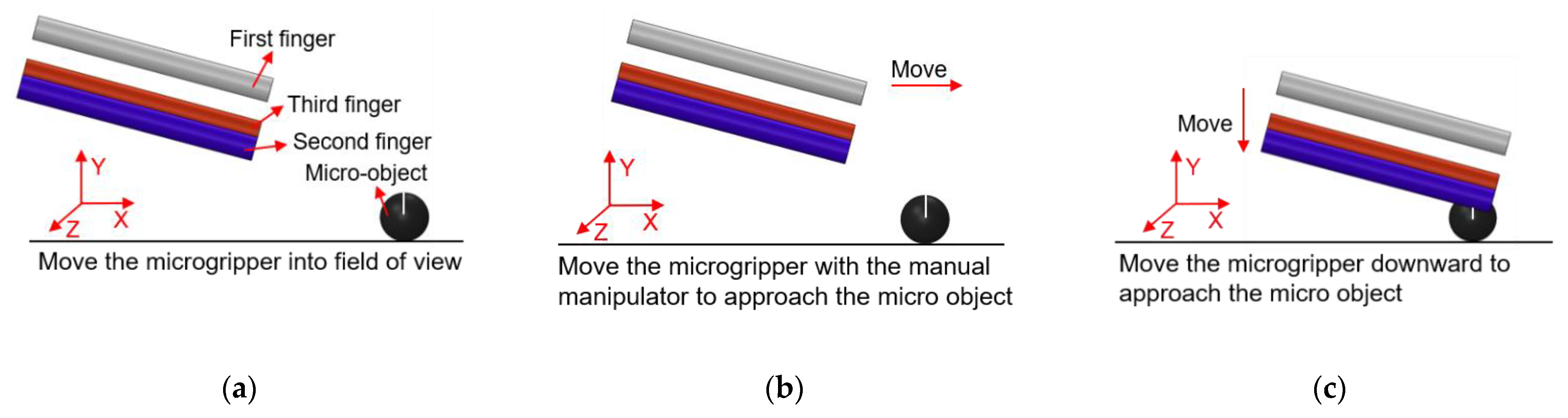
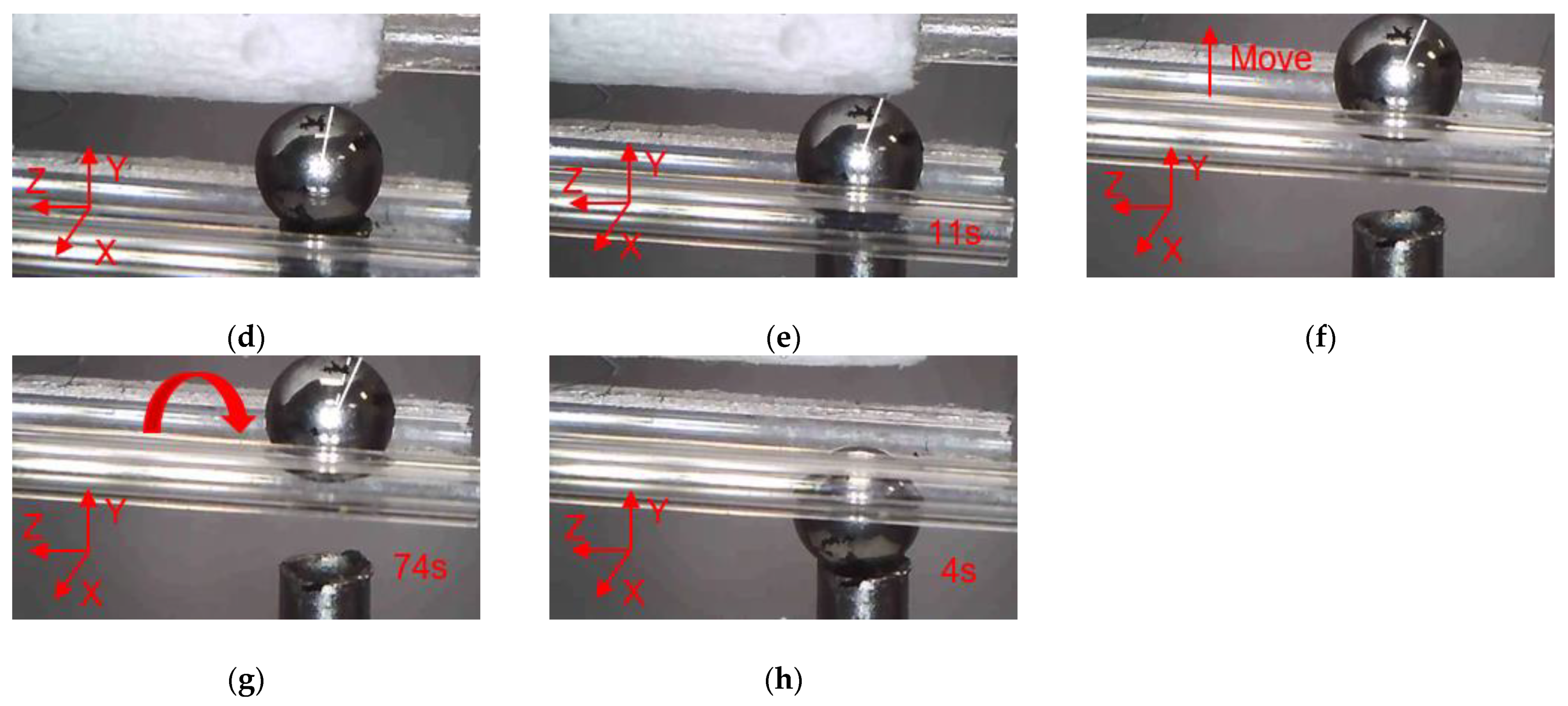
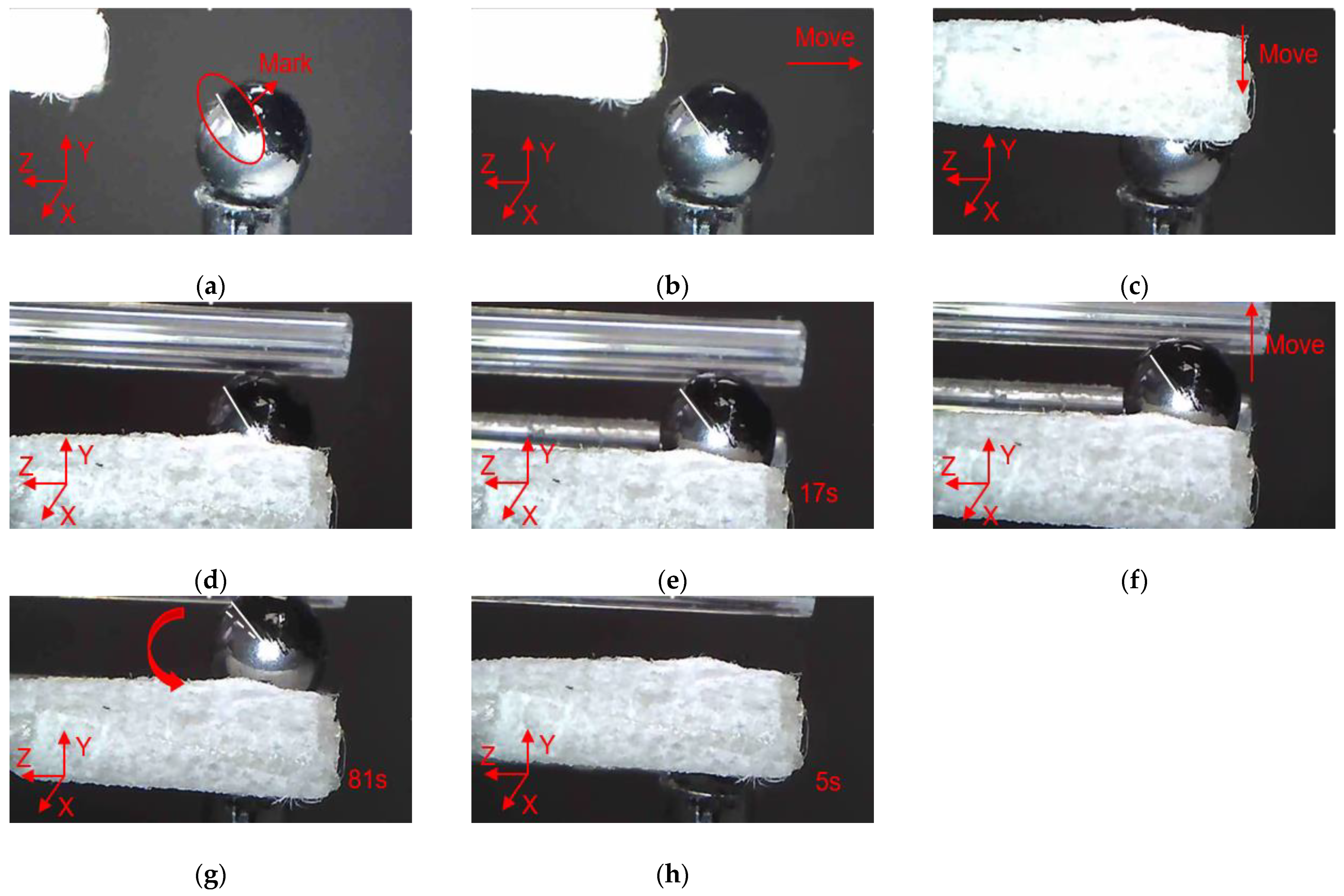
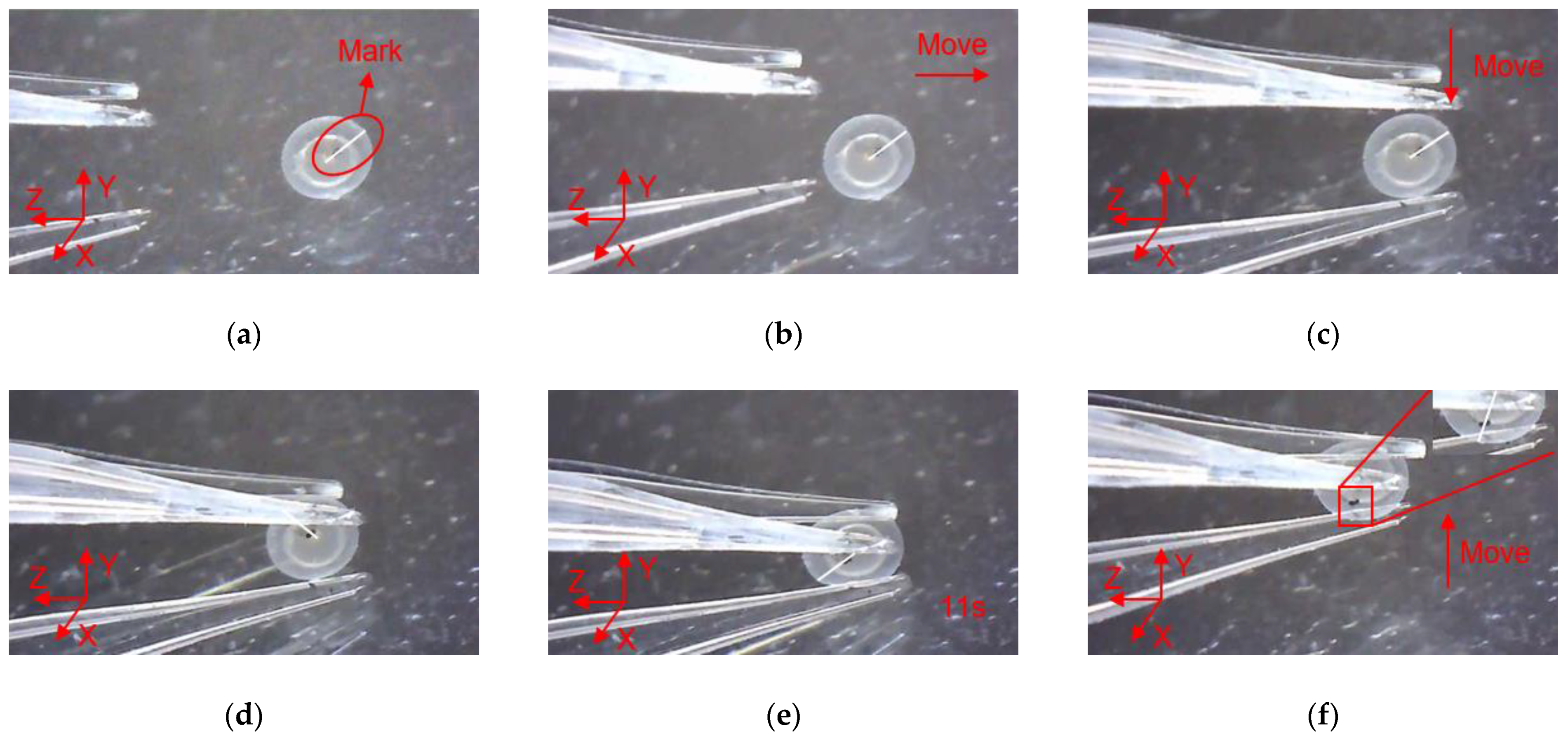
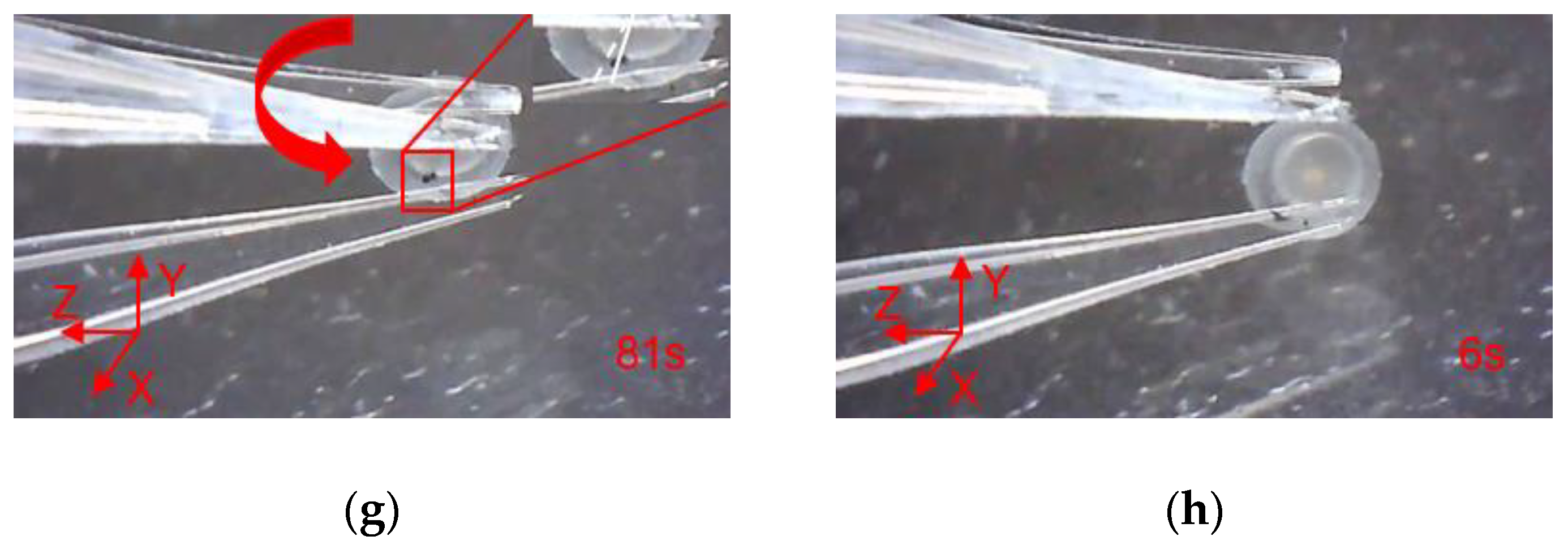
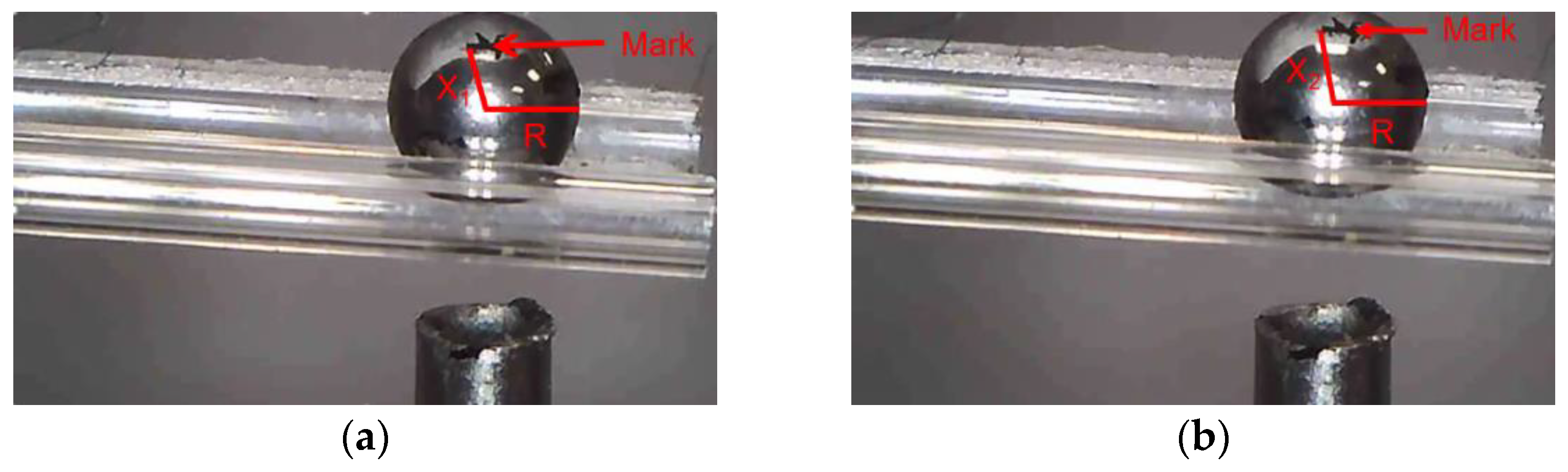
4.1. Manipulations of a Micro Ball
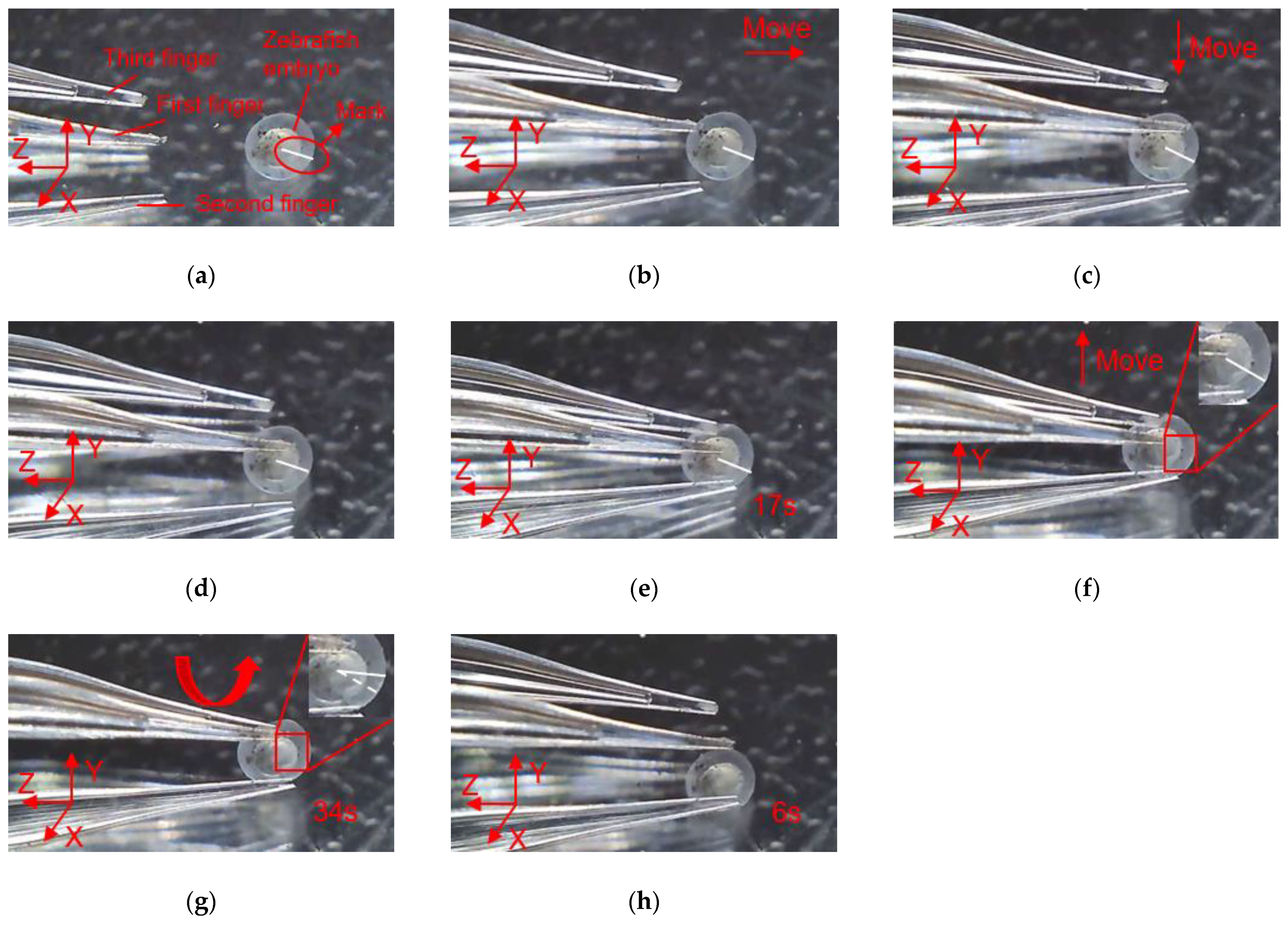
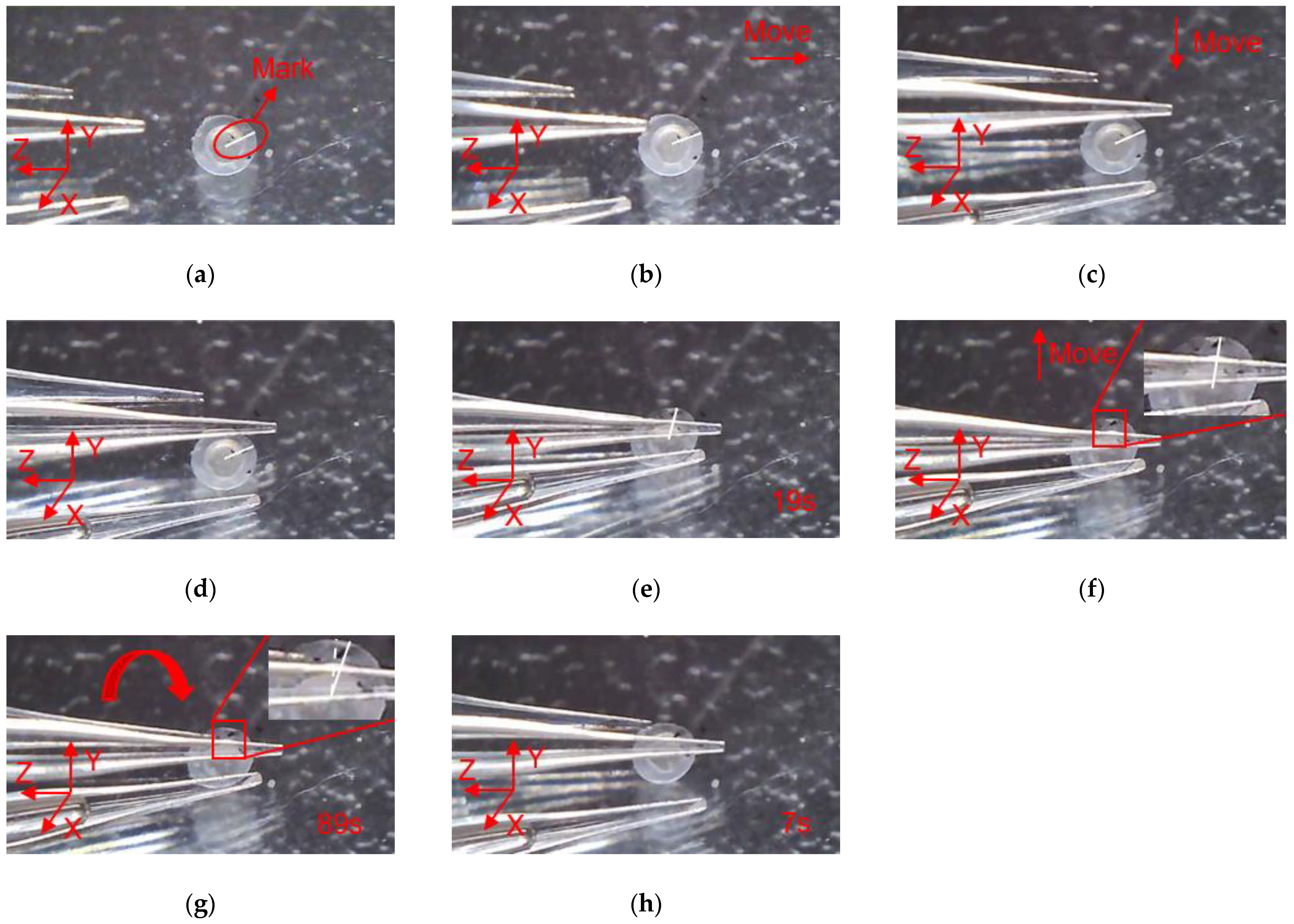
4.2. Manipulations of a Zebrafish Embryo
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Haghighi, R.; Cheah, C.C. Optical manipulation of multiple groups of microobjects using robotic tweezers. IEEE Trans. Robot. 2016, 32, 275–285. [Google Scholar] [CrossRef]
- Denisyuk, A.I.; Krasavin, A.V.; Komissarenko, F.E.; Mukhin, I.S. Mechanical, electrostatic, and electromagnetic manipulation of microobjects and nanoobjects in electron microscopes. Adv. Imaging Electron. Phys. 2014, 186, 101–140. [Google Scholar]
- Denisyuk, A.I.; Komissarenko, F.E.; Mukhin, I.S. Electrostatic pick-and-place micro/nanomanipulation under the electron beam. Microelectron. Eng. 2014, 121, 15–18. [Google Scholar] [CrossRef]
- Zhang, J.; Onaizah, O.; Middleton, K.; You, L.; Diller, E. Reliable grasping of three-dimensional untethered mobile magnetic microgripper for autonomous pick-and-place. IEEE Robot. Autom. Lett. 2017, 2, 835–840. [Google Scholar] [CrossRef]
- Avci, E.; Ohara, K.; Nguyen, C.; Theeravithayangkura, C.; Kojima, M.; Tanikawa, T.; Mae, Y.; Arai, T. high-speed automated manipulation of microobjects using a two-fingered microhand. IEEE Trans. Ind. Electron. 2015, 62, 1070–1079. [Google Scholar] [CrossRef]
- Chen, W.; Shi, X.; Chen, W.; Zhang, J. A two degree of freedom micro-gripper with grasping and rotating functions for optical fibers assembling. Rev. Sci. Instrum. 2013, 84, 115111. [Google Scholar] [CrossRef]
- Tanaka, Y.; Wakida, S.I. Controlled 3D rotation of biological cells using optical multiple-force clamps. Biomed. Opt. Express. 2014, 5, 2341–2348. [Google Scholar] [CrossRef] [Green Version]
- Hwang, J.Y.; Kim, J.; Kim, T.; Han, T. A periodic frequency band rotation scheme for multi-cell coordination clustering. IEEE Commun. Lett. 2011, 15, 956–958. [Google Scholar] [CrossRef]
- Zhang, X.P.; Leung, C.; Lu, Z.; Esfandiari, N.; Casper, R.F.; Sun, Y. Controlled aspiration and positioning of biological cells in a micropipette. IEEE Trans. Biomed. Eng. 2012, 59, 1032–1040. [Google Scholar] [CrossRef] [Green Version]
- Shojaei-Baghini, E.; Zheng, Y.; Sun, Y. Automated micropipette aspiration of single cells. Ann. Biomed. Eng. 2013, 41, 1208–1216. [Google Scholar] [CrossRef] [Green Version]
- Hochmuth, R.M. Micropipette aspiration of living cells. J. Biomech. 2000, 33, 15–22. [Google Scholar] [CrossRef]
- Oleshko, V.P.; Howe, J.M. Electron tweezers as a tool for high-precision manipulation of nanoobjects. Adv. Imaging Electron. Phys. 2013, 179, 203–262. [Google Scholar]
- Keloth, A.; Anderson, O.; Risbridger, D.; Paterson, L. Single cell isolation using optical tweezers. Micromachines 2018, 9, 434. [Google Scholar]
- Wang, F.; Liang, C.; Tian, Y.; Zhang, D. Design of a Piezoelectric-Actuated Microgripper with a Three-Stage Flexure-Based Amplification. IEEE/ASME Trans. Mech. 2015, 20, 2205–2213. [Google Scholar] [CrossRef]
- Niaki, M.H.; Nikoobin, A. Design and fabrication a long-gripping-range microgripper with active and passive actuators. Iran. J. Sci. Technol. Trans. Mech. Eng. 2019, 43, 575–585. [Google Scholar] [CrossRef]
- Al-Zandi, M.; Wang, C.; Voicu, R.; Muller, R. Measurement and characterisation of displacement and temperature of polymer based electrothermal microgrippers. Microsyst. Technol. 2017, 24, 1–9. [Google Scholar] [CrossRef]
- Xie, H.; Meng, X.; Zhang, H.; Sun, L. Development of a magnetically driven microgripper for piconewton force-controlled microscale manipulation and characterization. IEEE Trans. Ind. Electron. 2020, 67, 2065–2075. [Google Scholar] [CrossRef]
- Noveanu, S.; Lates, D.; Fusaru, L.; Rusu, C. A new compliant microgripper and study for flexure hinges shapes. Procedia Manuf. 2020, 46, 517–524. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Bepari, B.; Bhaumik, S. IPMC-Actuated compliant mechanism-based multifunctional multifinger microgripper. Mech. Based Des. Struct. Mach. 2014, 42, 312–325. [Google Scholar] [CrossRef]
- Yun, K.; Kim, W.J. System identification and microposition control of ionic polymer metal composite for three-finger gripper manipulation. Syst. Control. Eng. 2006, 220, 539–551. [Google Scholar] [CrossRef]
- Dsouza, R.D.; Navin, K.P.; Theodoridis, T.; Sharma, P. Design, fabrication and testing of a 2 DOF compliant flexural microgripper. Microsyst. Technol. 2018, 24, 3867–3883. [Google Scholar] [CrossRef]
- Chen, X.; Deng, Z.; Hu, S.; Gao, J.; Gao, X. Designing a novel model of 2-DOF large displacement with a stepwise piezoelectric-actuated microgripper. Microsyst. Technol. 2020, 26, 1–8. [Google Scholar] [CrossRef]
- Yang, S.; Xu, Q. A review on actuation and sensing techniques for MEMS-based microgrippers. J. Micro-Bio Robot. 2017, 13, 1–14. [Google Scholar] [CrossRef]
- Alogla, A.F.; Amalou, F.; Balmer, C.; Scanlan, P.; Shu, W.; Reuben, R.L. Micro-Tweezers: Design, Fabrication, Simulation and Testing of a Pneumatically Actuated Micro-Gripper for Micromanipulation and Microtactile Sensing. Sens. Actuator A Phys. 2015, 236, 394–404. [Google Scholar] [CrossRef] [Green Version]
- Soother, D.K.; Daudpoto, J.; Chowdhry, B.S. Challenges for practical applications of shape memory alloy actuators. Mater. Res. Express. 2020, 7, 1–12. [Google Scholar] [CrossRef]
- Jia, Y.; Jia, M.; Xu, Q. A dual-axis electrostatically driven mems microgripper. Int. J. Adv. Robot. Syst. 2014, 11, 1–9. [Google Scholar] [CrossRef]
- Hamedi, M.; Salimi, P.; Vismeh, M. Simulation and experimental investigation of a novel electrostatic microgripper system. Microelectron. Eng. 2012, 98, 467–471. [Google Scholar] [CrossRef]
- Kim, D.H.; Kim, B.; Shim, J.H. A superelastic alloy microgripper with embedded electromagnetic actuators and piezoelectric sensors. Proc. SPIE 2005, 5604, 230–237. [Google Scholar]
- Despa, V.; Catangiu, A.; Ivan, I.A.; Gurgu, V.; Ardeleanu, M. Modeling and control of a microgripper based on electromagnetic actuation. Sci. Bull. Valahia Univ. Mater. Mech. 2014, 9, 131–136. [Google Scholar]
- Rakotondrabe, M.; Ivan, I.A. Development and force/position control of a new hybrid thermo-piezoelectric microgripper dedicated to micromanipulation tasks. IEEE Trans. Autom. Sci. Eng. 2011, 8, 824–834. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.H.; Yang, Q.; Dong, H.M. A monolithic compliant piezoelectric-driven microgripper: Design, modeling, and testing. IEEE Trans. Mechatron. 2013, 18, 138–147. [Google Scholar] [CrossRef]
- Zhang, R.; Chu, J.; Wang, H.; Chen, Z. A multipurpose electrothermal microgripper for biological micro-manipulation. Microsyst. Technol. 2013, 19, 89–97. [Google Scholar] [CrossRef]
- Wang, Z.; Shen, X.; Chen, X. Design, modeling, and characterization of a MEMS electrothermal microgripper. Microsyst. Technol. 2015, 21, 2307–2314. [Google Scholar] [CrossRef]
- Potekhina, A.; Voicu, R.C.; Muller, R.; Al-Zandi, M.H.M.; Wang, C. Design and characterization of a polymer electrothermal microgripper with a polynomial flexure for efficient operation and studies of moisture effect on negative deflection. Microsyst. Technol. 2020, 1–9. [Google Scholar] [CrossRef]
- Voicu, R.C.; Tibeica, C.; Müller, R.; Dinescu, A.; Birleanu, C. SU-8 microgrippers based on V-shaped electrothermal actuators with implanted heaters. Rom. J. Inf. Sci. Technol. 2016, 19, 269–281. [Google Scholar]
- Zhang, Z.; Yu, Y.; Liu, X.; Zhang, X. Dynamic modelling and analysis of V- and Z-shaped electrothermal microactuators. Microsyst. Technol. 2017, 23, 3775–3789. [Google Scholar] [CrossRef]
- Vij, R.; Singh, B.; Jain, D.K. Design and analysis of electro thermally actuated microgripper. IOSR J. VLSI Signal. Process. 2014, 4, 46–51. [Google Scholar] [CrossRef]
- Zhang, W.; Gnerlich, M.; Paly, J.J.; Sun, Y.; Jing, G.; Voloshin, A. A polymer V-shaped electrothermal actuator array for biological applications. J. Micromech. Microeng. 2008, 18, 1–8. [Google Scholar] [CrossRef]
- Kazi, I.H.; Wild, P.M.; Moore, T.N.; Sayer, M. The electromechanical behavior of nichrome (80/20 wt.%) film. Thin Solid Films 2003, 433, 337–343. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Ho, S.S.; Low, L.N. A polymeric microgripper with integrated thermal actuators. J. Micromech. Microeng. 2004, 14, 969–974. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, W.; Wu, Q.; Yu, Y.; Liu, X.; Zhang, X. Closed-form modelling and design analysis of V- and Z-shaped electrothermal microactuators. J. Micromech. Microeng. 2017, 27, 015023. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Actuator | Definition | Value |
|---|---|---|---|
| d1 | 3D U-shape actuator | Width of beam | 1 |
| d2 | The distance between beam and base boundary | 1.5 | |
| d3 | Length of base | 6 | |
| d4 | Thickness of beam | 0.8 | |
| d5 | The distance between beam and base boundary | 0.4 | |
| d6 | Length of beam | 52 | |
| b | V-shaped actuator | Thickness of beam and shuttle | 3 |
| h1 | Length of shuttle | 10.26 | |
| h2 | Length of anchor | 10.86 | |
| h3 | Thickness of beam | 1 | |
| L1 | Width of shuttle and anchor | 2 | |
| L2 | Span of the beam | 24 | |
| θ | Inclination of beam | 1.89° |
| Rotation about Axis X | Rotation about Axis Y | Rotation about Axis Z | |
|---|---|---|---|
| The angle of rotation of the ball | 13.35° | 16.21° | 15.60° |
| The angle of rotation of the zebrafish embryo | 21.61° | 20.46° | 23.70° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Si, G.; Sun, L.; Zhang, Z.; Zhang, X. Design, Fabrication, and Testing of a Novel 3D 3-Fingered Electrothermal Microgripper with Multiple Degrees of Freedom. Micromachines 2021, 12, 444. https://doi.org/10.3390/mi12040444
Si G, Sun L, Zhang Z, Zhang X. Design, Fabrication, and Testing of a Novel 3D 3-Fingered Electrothermal Microgripper with Multiple Degrees of Freedom. Micromachines. 2021; 12(4):444. https://doi.org/10.3390/mi12040444
Chicago/Turabian StyleSi, Guoning, Liangying Sun, Zhuo Zhang, and Xuping Zhang. 2021. "Design, Fabrication, and Testing of a Novel 3D 3-Fingered Electrothermal Microgripper with Multiple Degrees of Freedom" Micromachines 12, no. 4: 444. https://doi.org/10.3390/mi12040444