
Effect of Concave Stave on Class I Barrel-Stave Flextensional Transducer


Abstract
:1. Introduction
2. Class I Concave Barrel-Stave Flextensional Transducer
3. Finite Element Analysis of Class I BSFT
4. Concave Stave
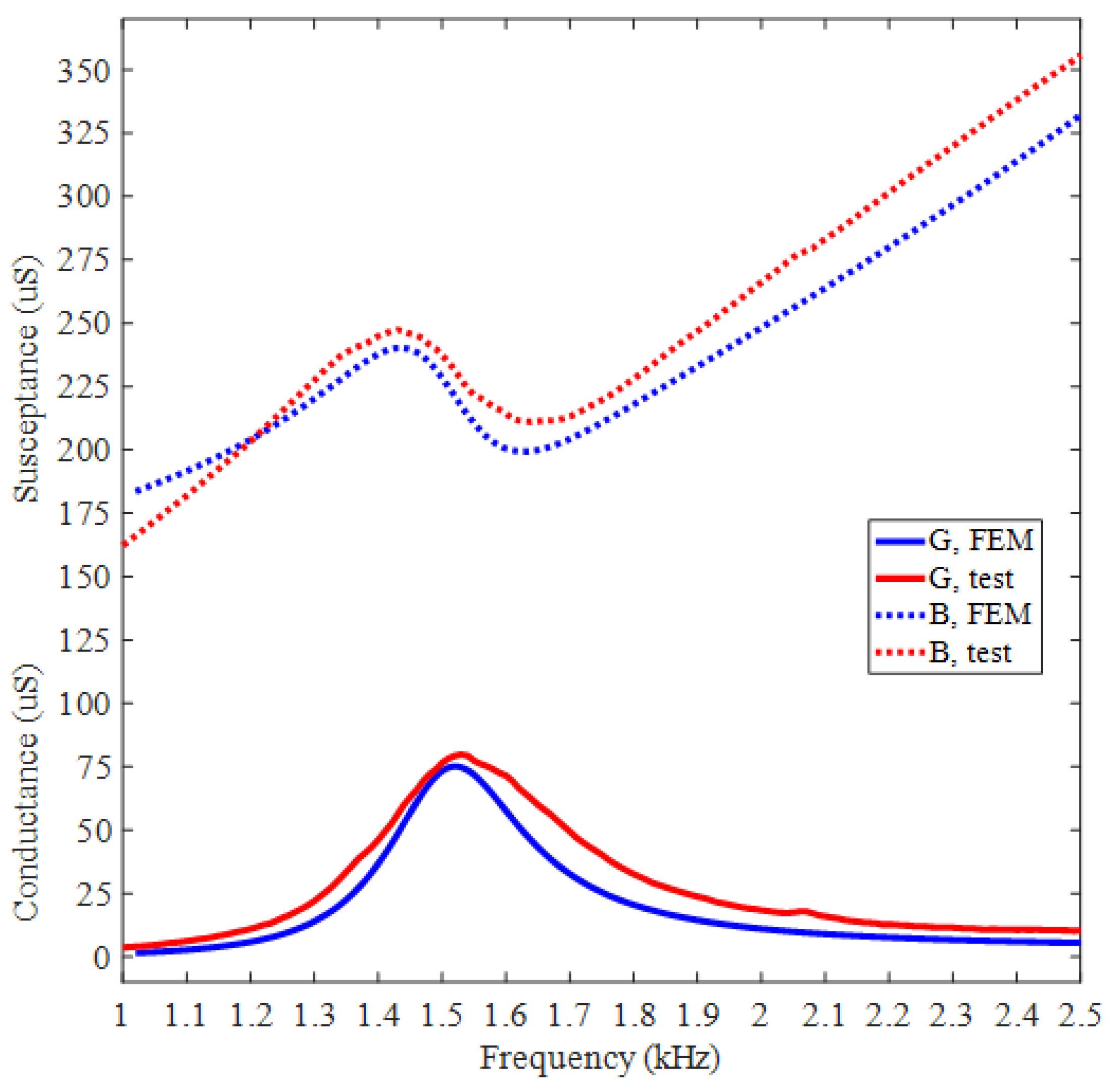
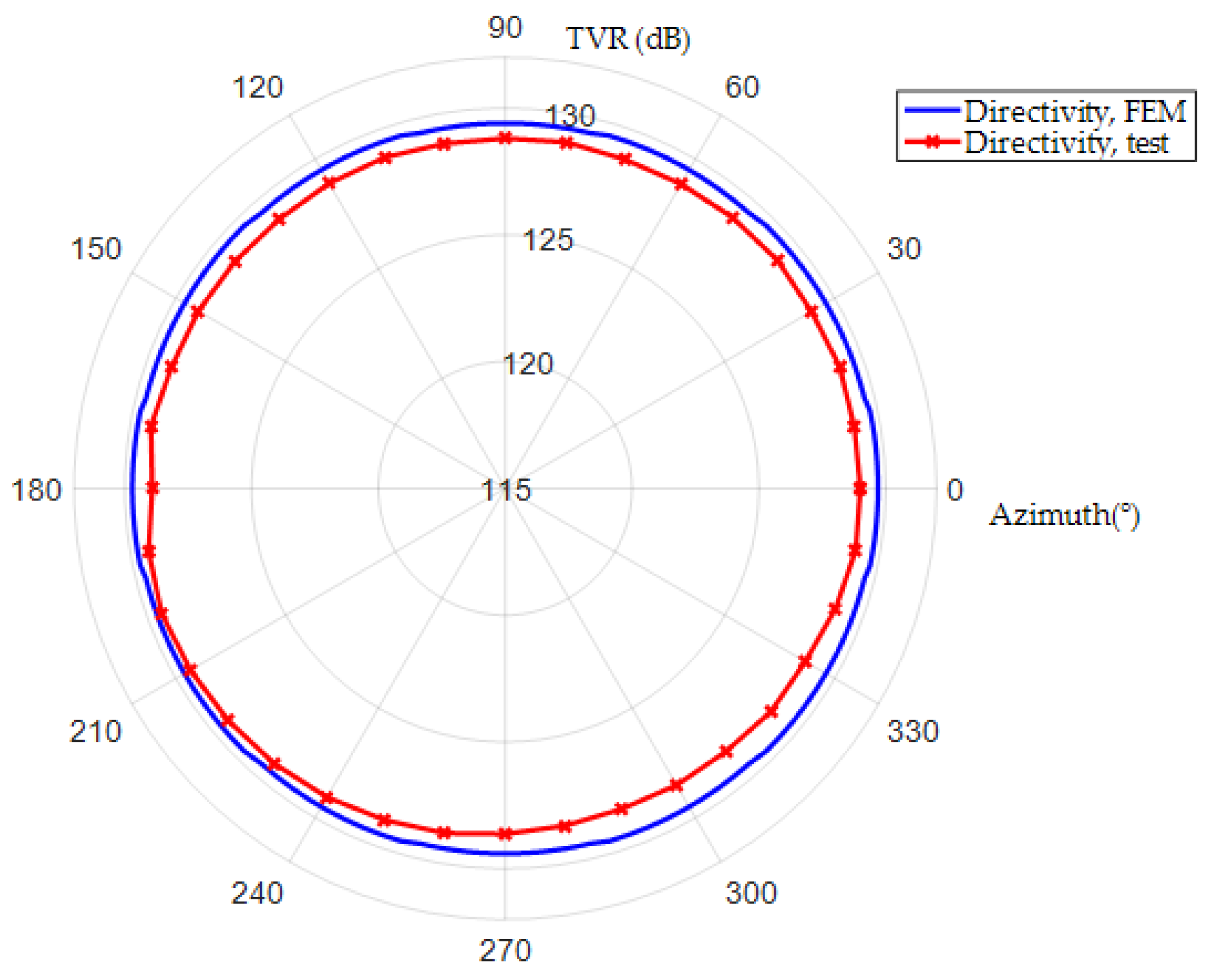
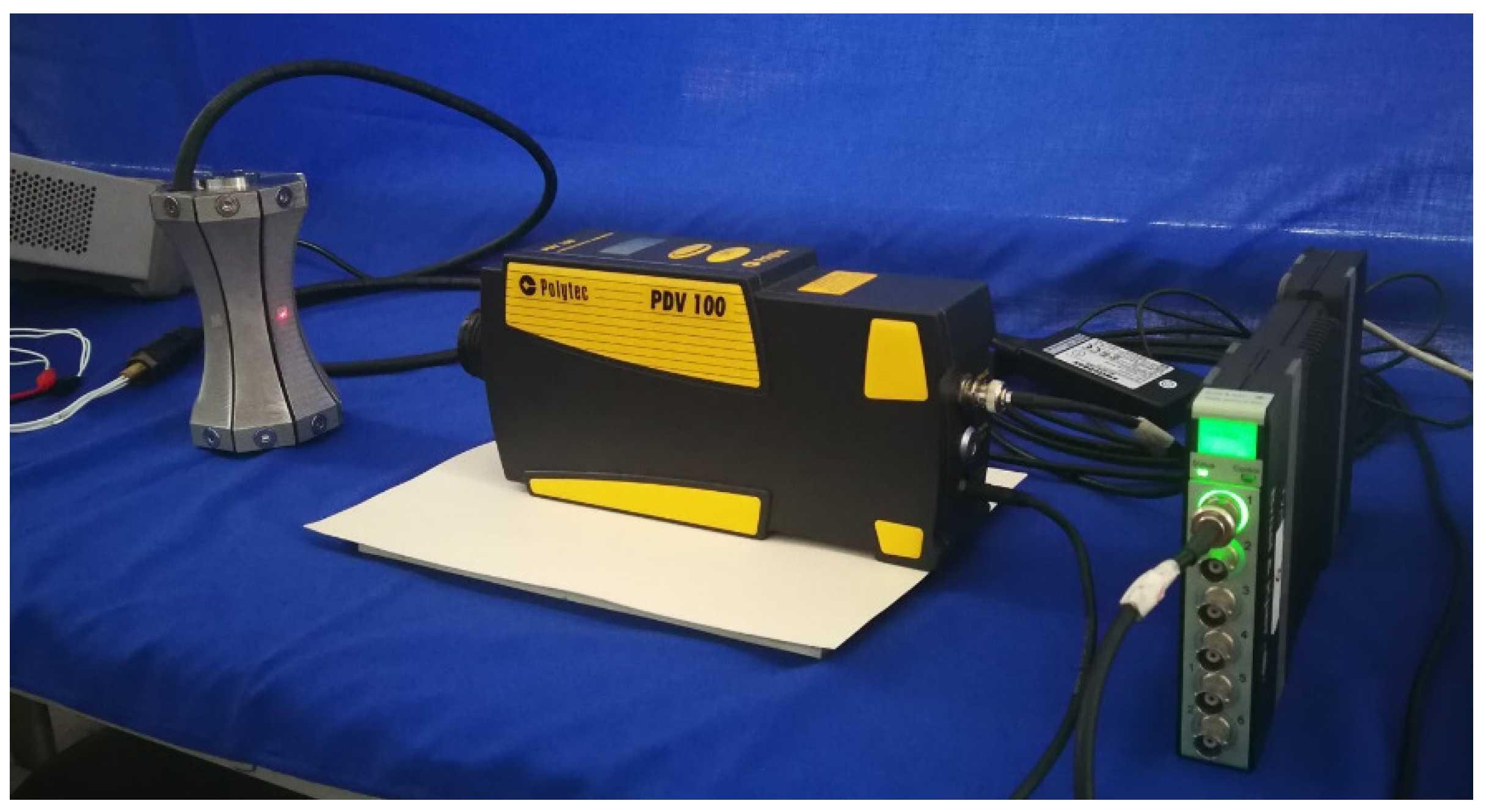
5. Test and Discussion
6. Conclusions
- (1)
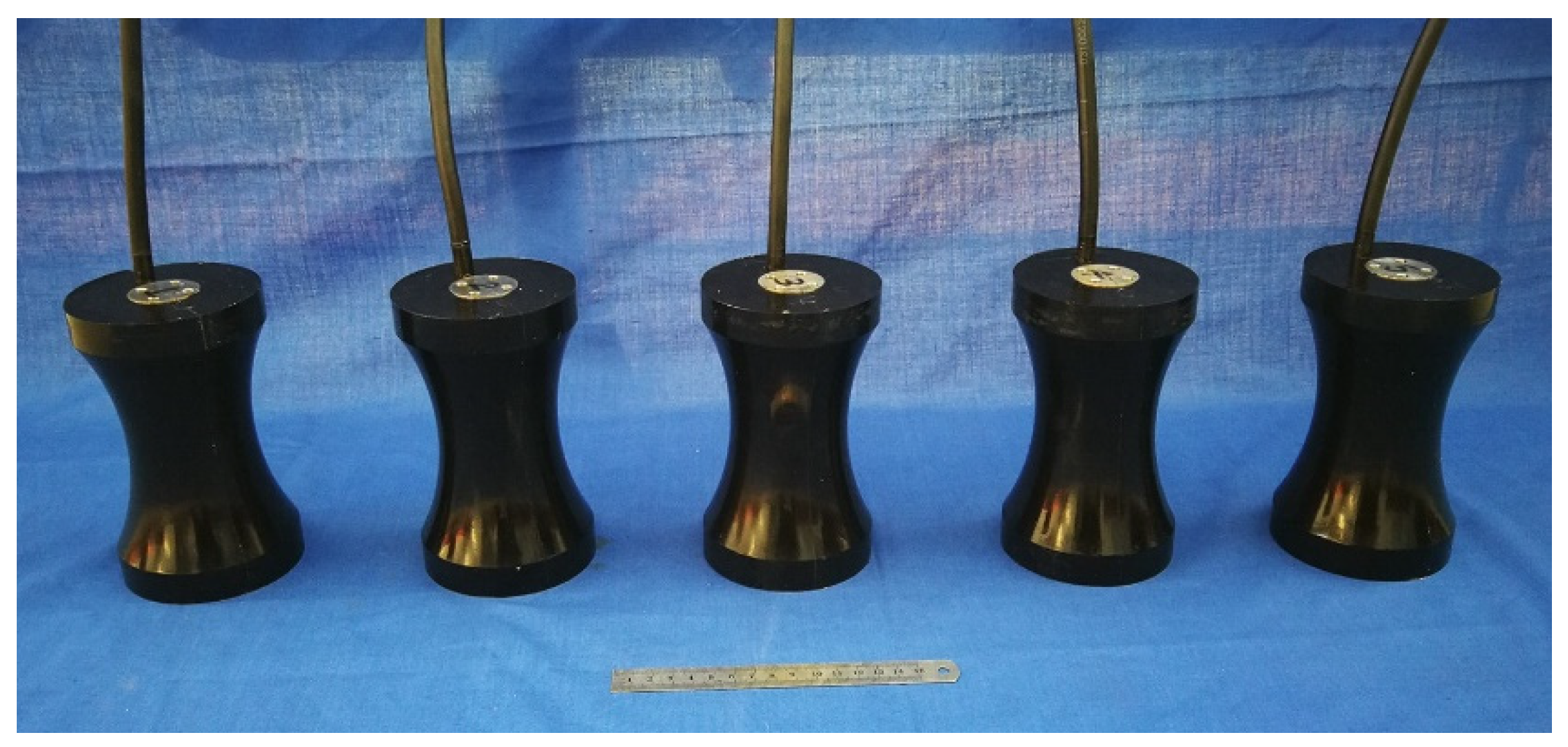
- As underwater projectors, our Class I BSFTs exhibit the outstanding electrical and acoustical performances. Their advantages of low frequency, high power, small size and light weight are obvious. Especially, their weight of 2.27 kg and size of Φ 96 × 160 mm are inaccessible targets for another classical low-frequency projectors such as free-flooded rings with same resonance frequency. The portability of Class I BSFTs is attractive in their application.
- (2)
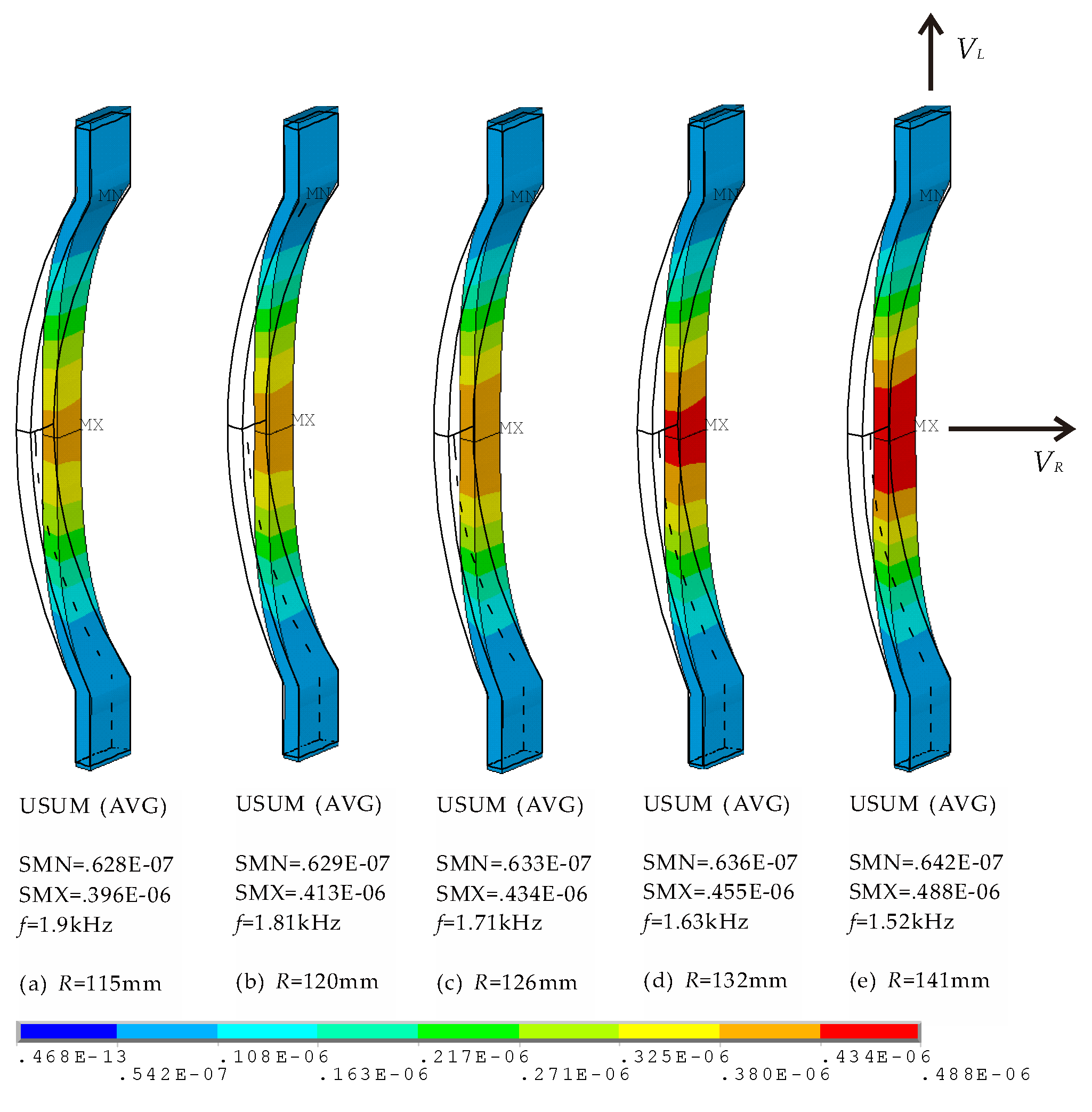
- Shell is important for a flextensional transducer to lower its resonance and produce useful vibration. In our configuration, the shell is composed of several improved concave staves, which are curved along height direction while are planar along width direction. This type of concave staves is easy to be machined. Moreover, they present beneficial performances for transducer. Concave stave is the key for our BSFTs.
- (3)
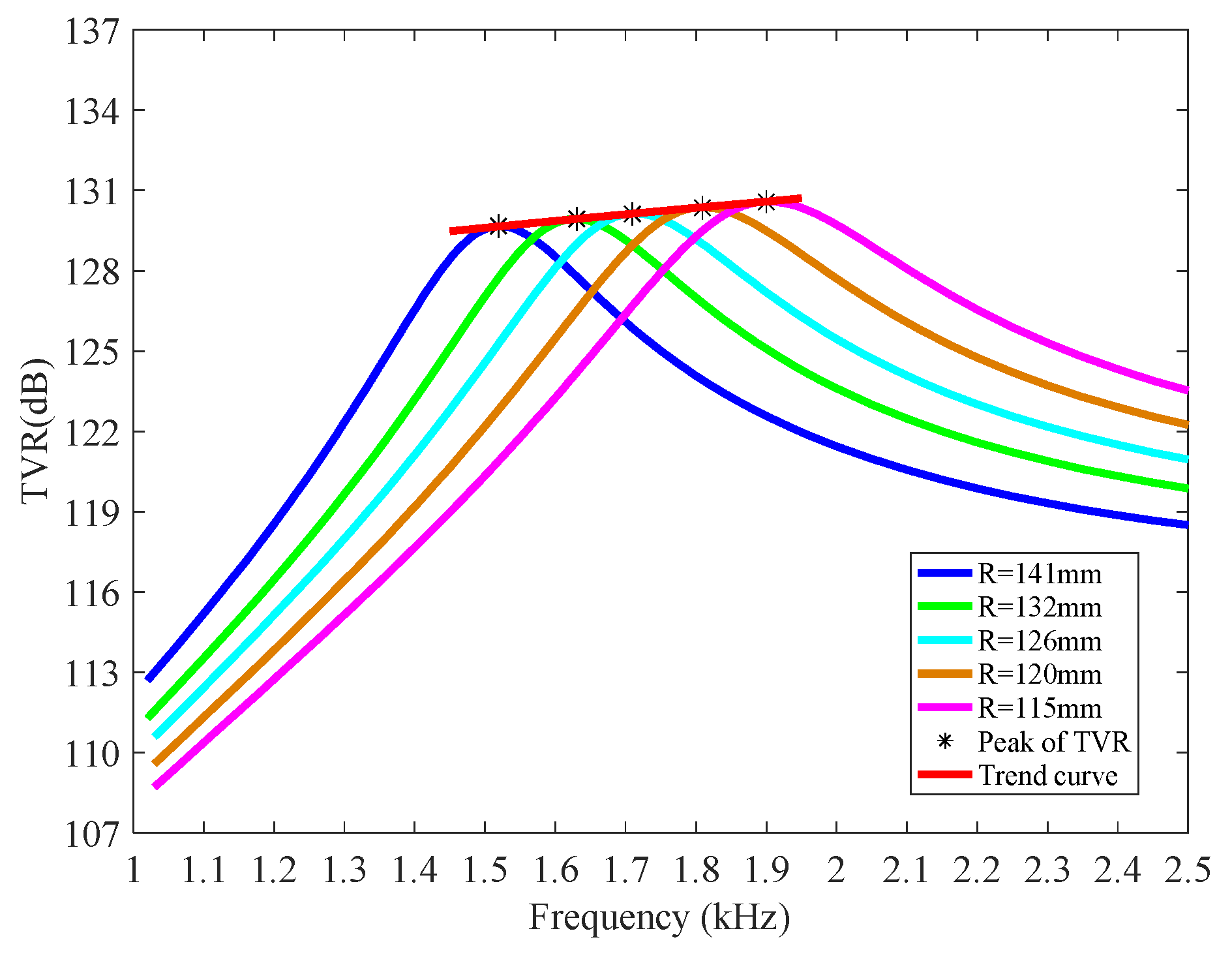
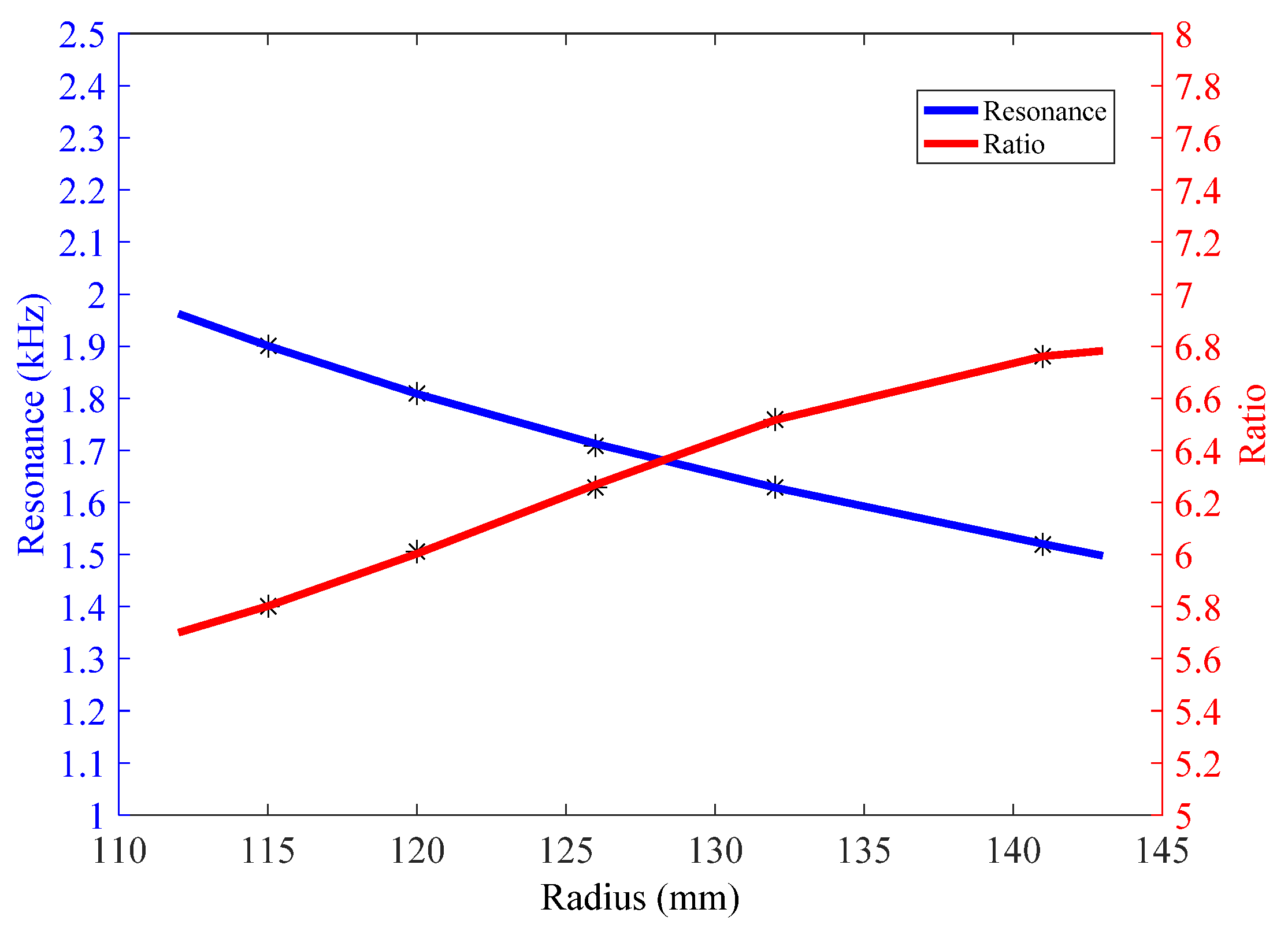
- The radius of concave stave is one of the crucial affecting factors to performances of transducer. The resonance frequency of transducer will be gradually lowered with enlarging the radius of concave stave. In a small range, this is a feasible way to obtained desired resonance of BSFT.
- (4)
- Concave stave is specific implementor for transducer to convert vibration direction and amplify out displacement. The radius of concave stave affects amplification of vibration. A larger radius will result in a greater amplification. But in a small radius range, source level will not be caused in synchronized raising because of the falling of resonance.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hodges, R.P. Underwater Acoustics: Analysis, Design and Performance of Sonar; Wiley: Hoboken, NJ, USA, 2010; pp. 1–5. [Google Scholar]
- Hovem, J.M. Underwater acoustics: Propagation, devices and systems. J. Electroceramics 2007, 19, 339–347. [Google Scholar] [CrossRef]
- Tressler, J.F. Piezoelectric Transducer Designs for Sonar Applications. In Piezoelectric and Acoustic Materials for Transducer Applications; Safari, A., Akdoğan, E.K., Eds.; Springer: Boston, MA, USA, 2008; pp. 217–239. [Google Scholar]
- Timme, R.W.; Young, A.M.; Blue, J.E. Transducer needs for low-frequency sonar. In Power Sonic and Ultrasonic Transducer Design; Hamonic, B., Decarpigny, J.N., Eds.; Springer: Berlin/Heidelberg, Germany, 1987; pp. 3–13. [Google Scholar]
- Guo, R.J.; Li, S.Y.; Li, T.A.; Sun, X.; Lin, L.; Sun, S.H. Analysis and design of low frequency and high power flextensional transducer with double-grooves. Appl. Acoust. 2019, 149, 25–31. [Google Scholar] [CrossRef]
- Been, K.; Nam, S.; Lee, H.; Seo, H.; Moon, W. A lumped parameter model of the single free-flooded ring transducer. J. Acoust. Soc. Am. 2017, 141, 4740–4755. [Google Scholar] [CrossRef] [PubMed]
- Delany, J.L. Bender transducer design and operation. J. Acoust. Soc. Am. 2001, 109, 554–562. [Google Scholar] [CrossRef] [PubMed]
- Mo, X.P.; Zhu, H.Q. Thirty years’ progress of underwater sound projectors in China. Sci. Sin.-Phys. Mech. Astron. 2013, 43, s42–s50. [Google Scholar] [CrossRef]
- Rolt, K.D. History of the flextensional electroacoustic transducer. J. Acoust. Soc. Am. 1990, 87, 1340–1349. [Google Scholar] [CrossRef]
- Toulis, W.J. Electromechanical coupling and composite transducers. J. Acoust. Soc. Am. 1963, 35, 74–80. [Google Scholar] [CrossRef]
- National Defense Research Committee. The design and construction of magnetostriction transducers. In Summary Technical Report of Division 6; National Defense Research Committee: Washington, DC, USA, 1946; Volume 13, pp. 11–12. [Google Scholar]
- Hayes, H.C. Sound Generation and Directing Apparatus. U.S. Patent 2,064,911, 22 December 1936. [Google Scholar]
- Toulis, W.J. Flexural-Extensionsl Electromechanical Transducer. U.S. Patent 3,277,433, 4 October 1966. [Google Scholar]
- Brigham, G.A.; Royster, L.H. Present status in the design of flextensional underwater acoustic transducers. J. Acoust. Soc. Am. 1969, 46, 92. [Google Scholar] [CrossRef] [Green Version]
- Jones, D.F. Performance analysis of a low-frequency barrel-stave flextensional projector. In Proceedings of the ONR Transducer Materials and Transducers Workshop, State College, PA, USA, 25–27 March 1996. [Google Scholar]
- Somayajula, N.; Nemana, S.; Ng, H. Design, assembly and performance of a 1.6 kHz Class I barrel stave projector. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–4. [Google Scholar]
- Royster, L.H. Flextensional underwater acoustics Transducer. J. Acoust. Soc. Am. 1969, 45, 671–682. [Google Scholar] [CrossRef]
- Chai, Y.; Mo, X.P.; Liu, Y.P.; Pan, Y.Z.; Zhang, Y.Q. Study on the driving element of gourd transducer. In Proceedings of the IEEE/OES China Ocean Acoustics Symposium, COA 2016, Harbin, China, 9–11 January 2016; pp. 1–4. [Google Scholar]
- Zhou, T.F.; Lan, Y.; Zhang, Q.C.; Yuan, J.W.; Li, S.C.; Lu, W. A conformal driving Class IV flextensional transducer. Sensors 2018, 18, 2102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, J.D.; Hughes, W.J.; Bouchilloux, P.; Meyer, R.J., Jr.; Uchino, K.; Newnham, R.E. A class V flextensional transducer: The cymbal. Ultrasonics 1999, 37, 387–393. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, W.; Li, Z.; Wang, P.; Xie, Q.; Wang, S.; Jia, Y.; Ye, H.; Lian, Y. Study on the performance of concave flextensional transducer based on finite element method. In Proceedings of the IEEE/OES China Ocean Acoustics, COA, Harbin, China, 14–17 July 2021. [Google Scholar]
- Moosad, K.P.B.; Abraham, P. Design optimization of a Class VII Flextensional Transducer. Appl. Acoust. 2015, 100, 3–9. [Google Scholar] [CrossRef]
- Bonin, Y.R.M.; Purcell, C.J. The folded shell projector: A new flextensional acoustic source. In Proceedings of the Undersea Defence Technology Conference Proceedings, Nice, France, 29 June–1 July 1999; pp. 290–294. [Google Scholar]
- Jones, D.F. Flextensional barrel-stave projectors. In Proceeding of the 3rd International Workshop on Transducers for Sonics and Ultrasonics, Orlando, FL, USA, 6–8 May 1992; pp. 150–159. [Google Scholar]
- Jones, D.F.; Lewis, D.J.; Reithmeier, C.G.; Brownell, G.A. Barrel-stave flextensional transducers for sonar applications. In Proceedings of the Design Engineering Technical Conferences, Boston, MA, USA, 17–20 September 1995; pp. 517–524. [Google Scholar]
- He, X.P.; Wang, Y.M.; Zhang, Z.Q.; Teng, D. Dependence of performance of flextensional barrel-stave transducer on the number of shell slots. Appl. Acoust. 2008, 27, 440–443. [Google Scholar]
- Şahin, A. Barrel-Stave Flextensional Transducer Design. Master Thesis, Bilkent University, Ankara, Turkey, 2009. [Google Scholar]
- McMahon, G.W.; Jones, D.F. Barrel Stave Projector. U.S. Patent 4,922,470, 1 May 1990. [Google Scholar]
- Behringer, A.; Beerens, S.P.; Spek, E.; Sprik, R. Improved design and manufacturing of low frequency broadband underwater transducers. In Proceedings of the Undersea Defence Technology Exhibition and Conference, Stockholm, Sweden, 13–15 May 2019; pp. 1–4. [Google Scholar]
- Moffett, M.B.; Lindberg, J.F.; McLaughlin, E.A.; Powers, J.M. An equivalent circuit model for barrel stave flextensional transducers. In Transducers for Sonics and Ultrasonics; McCollum, M.D., Hamonic, B.F., Wilson, O.B., Eds.; Technomic: Lancaster, PA, USA, 1993. [Google Scholar]
- Fleming, R.A.G.; Kwiecinski, M.; Jones, D.F. Analysis of a barrel-stave flextensional transducer using MAVART and ATILA finite element codes. Can. Acoust. 2008, 36, 43–47. [Google Scholar]
- Nader, G.; Silva, E.C.N.; Adamowski, J.C. Characterization of novel flextensional transducers designed by using topology optimization method. In Proceedings of the 2001 IEEE Ultrasonics Symposium, Proceedings, Atlanta, GA, USA, 7–10 October 2001; pp. 981–984. [Google Scholar]
- Kang, K.; Roh, Y. Optimization of structural variables of a flextensional transducer by the statistical multiple regression analysis method. J. Acoust. Soc. Am. 2003, 114, 1454–1461. [Google Scholar] [CrossRef] [PubMed]
- Tajdari, F.; Berkhoff, A.P.; Boer, A. Numerical modeling of electrical-mechanical-acoustical behavior of a lumped acoustic source driven by a piezoelectric stack actuator. In Proceedings of the 27th International Conference on Noise and Vibration Engineering, ISMA 2016, Heverlee, Belgium, 19–21 September 2016; pp. 1261–1275. [Google Scholar]
- Hladky-Hennion, A.C.; Dubus, B. Finite element analysis of piezoelectric transducers. In Piezoelectric and Acoustic Materials for Transducer Applications; Springer: New York, NY, USA, 2008; pp. 241–258. [Google Scholar]
- He, X.P.; Ren, H.J. Pre-Stress of underwater flextensional transducers and its variation with water depth. Acta Acust. United Acustica 2008, 94, 483–486. [Google Scholar]
- Butler, J.L.; Sherman, C.H. Transducers and Arrays for Underwater Sound, 2nd ed.; Springer: Cham, Switzerland, 2016; pp. 207–219. [Google Scholar]
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Sanders, J.V. Fundamentals of Acoustics, 4th ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2000; pp. 171–183. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Size | Material | Quantity | Material Property [37] |
|---|---|---|---|---|
| Piezoelectric stack | 22 pieces of piezoelectric rings (Φ 30 × 5 mm with a hole of Φ 13 mm), polarization along thickness direction | PZT-4 piezoelectric ceramic | Density (kg/m3) | 7600 |
| Stiffness coefficients matrix (×1010 N/m2) | ||||
| Piezoelectric stress matrix (C/m2) | ||||
| Relative permittivity matrix | ||||
| Insulator | 2 pieces, (Φ 30 × 3 mm with a hole of Φ 13 mm) | Rigid laminated sheet Epoxy resin | Density (kg/m3) | 1800 |
| Young’s modulus (N/m2) | 2.4 × 1010 | |||
| Poisson’s ratio | 0.38 | |||
| End cap | 2 pieces, Octagon, Inscribed circle diameter of 74 mm, Thickness of 18 mm | Steel | Density (kg/m3) | 7840 |
| Young’s modulus (N/m2) | 2.16 × 1011 | |||
| Poisson’s ratio | 0.28 | |||
| Prestressed bolt | M8 × 123.5 mm | Steel | ||
| Concave stave | 8 pieces, R = 141 mm, t = 4.5 mm, h = 122 mm, D = 28.5 mm, d = 15.5 mm | Aluminium alloy | Density (kg/m3) | 2700 |
| Young’s modulus (N/m2) | 7.1 × 1010 | |||
| Poisson’s ratio | 0.33 | |||
| Acoustic medium around BSFT | Water | Density (kg/m3) | 1000 | |
| Sound velocity (m/s) | 1481 |
| No. | Radius (mm) | Resonance (kHz) FEM Test | Max TVR (dB) FEM Test | Amplification FEM Test | |||
|---|---|---|---|---|---|---|---|
| 1 | 115 | 1.9 | 1.96 | 130.6 | 129.6 | 5.80 | 5.98 |
| 2 | 120 | 1.81 | 1.85 | 130.4 | 130.1 | 6.01 | 6.40 |
| 3 | 126 | 1.71 | 1.71 | 130.1 | 129.3 | 6.26 | 6.33 |
| 4 | 132 | 1.63 | 1.64 | 129.9 | 128.6 | 6.52 | 6.57 |
| 5 | 141 | 1.52 | 1.53 | 129.7 | 129.0 | 6.76 | 6.95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, D.; Liu, X.; Gao, F. Effect of Concave Stave on Class I Barrel-Stave Flextensional Transducer. Micromachines 2021, 12, 1258. https://doi.org/10.3390/mi12101258
Teng D, Liu X, Gao F. Effect of Concave Stave on Class I Barrel-Stave Flextensional Transducer. Micromachines. 2021; 12(10):1258. https://doi.org/10.3390/mi12101258
Chicago/Turabian StyleTeng, Duo, Xiaoyong Liu, and Feng Gao. 2021. "Effect of Concave Stave on Class I Barrel-Stave Flextensional Transducer" Micromachines 12, no. 10: 1258. https://doi.org/10.3390/mi12101258