Impact of Improved Design on Knudsen Force for Micro Gas Sensor


Abstract
:1. Introduction
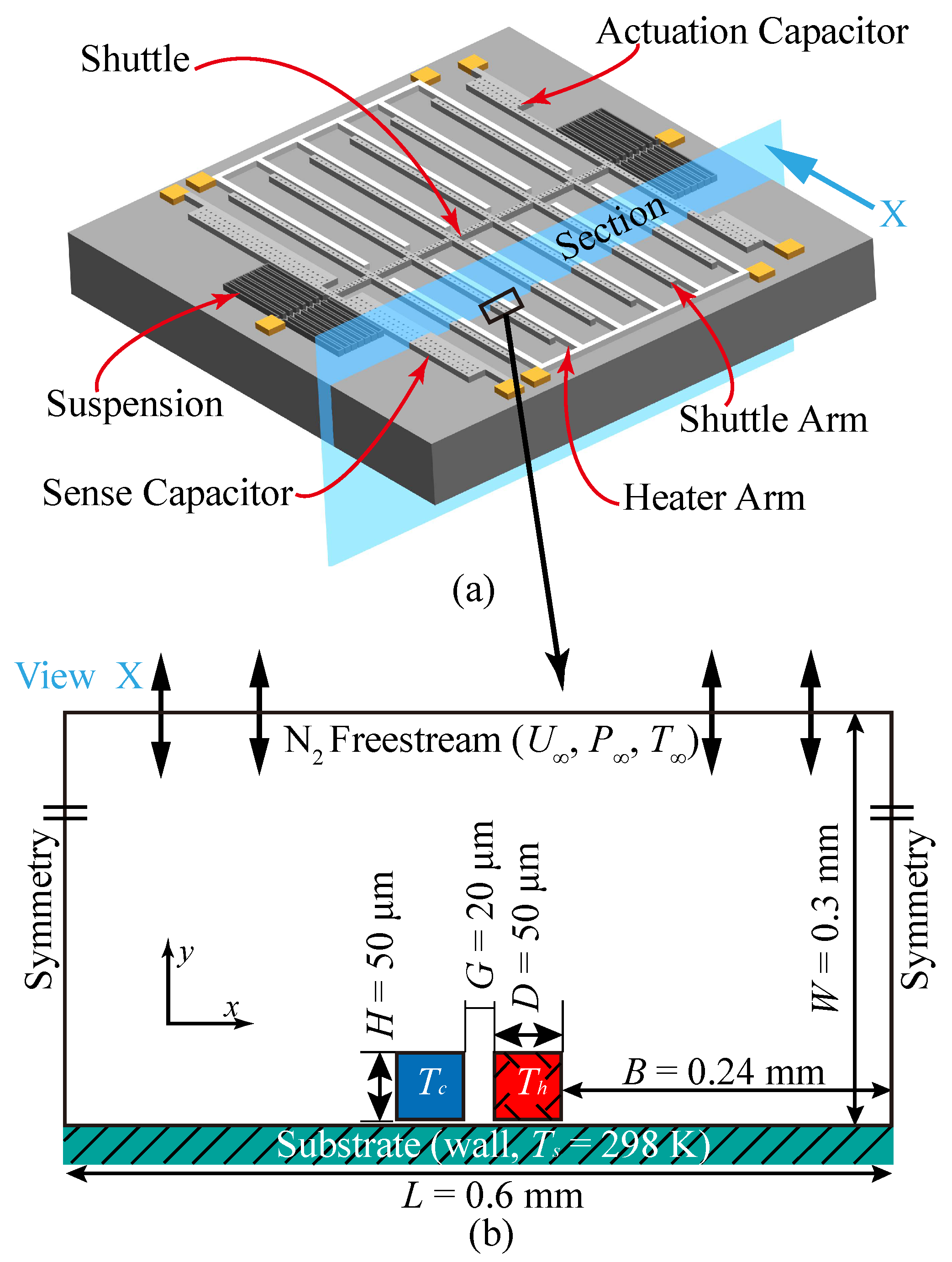
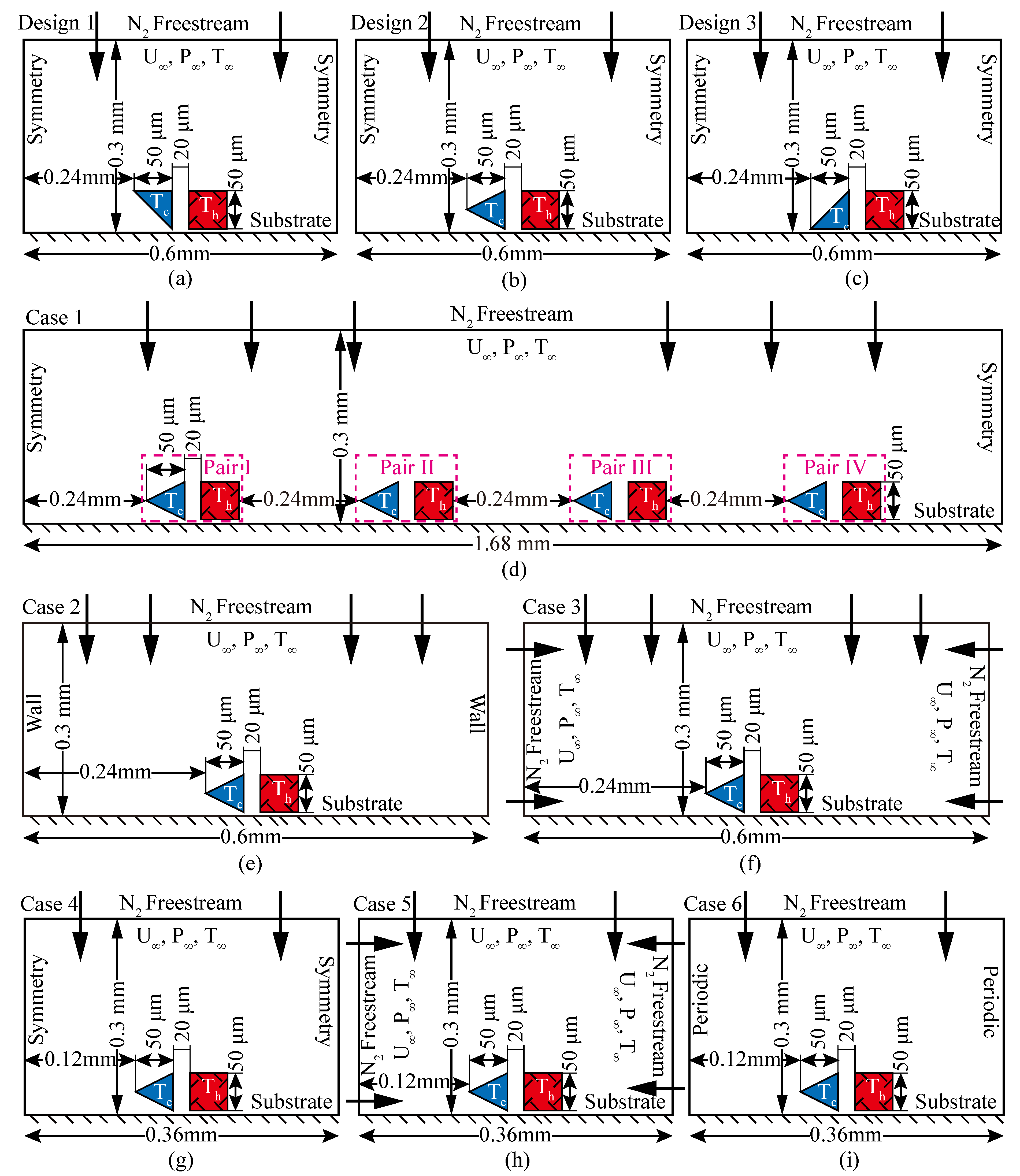
2. Problem Statement
3. Numerical Approach
3.1. Direct Simulation Monte Carlo (DSMC) Method and Solver
3.2. Parameter and Boundary Condition
4. Results and Discussion
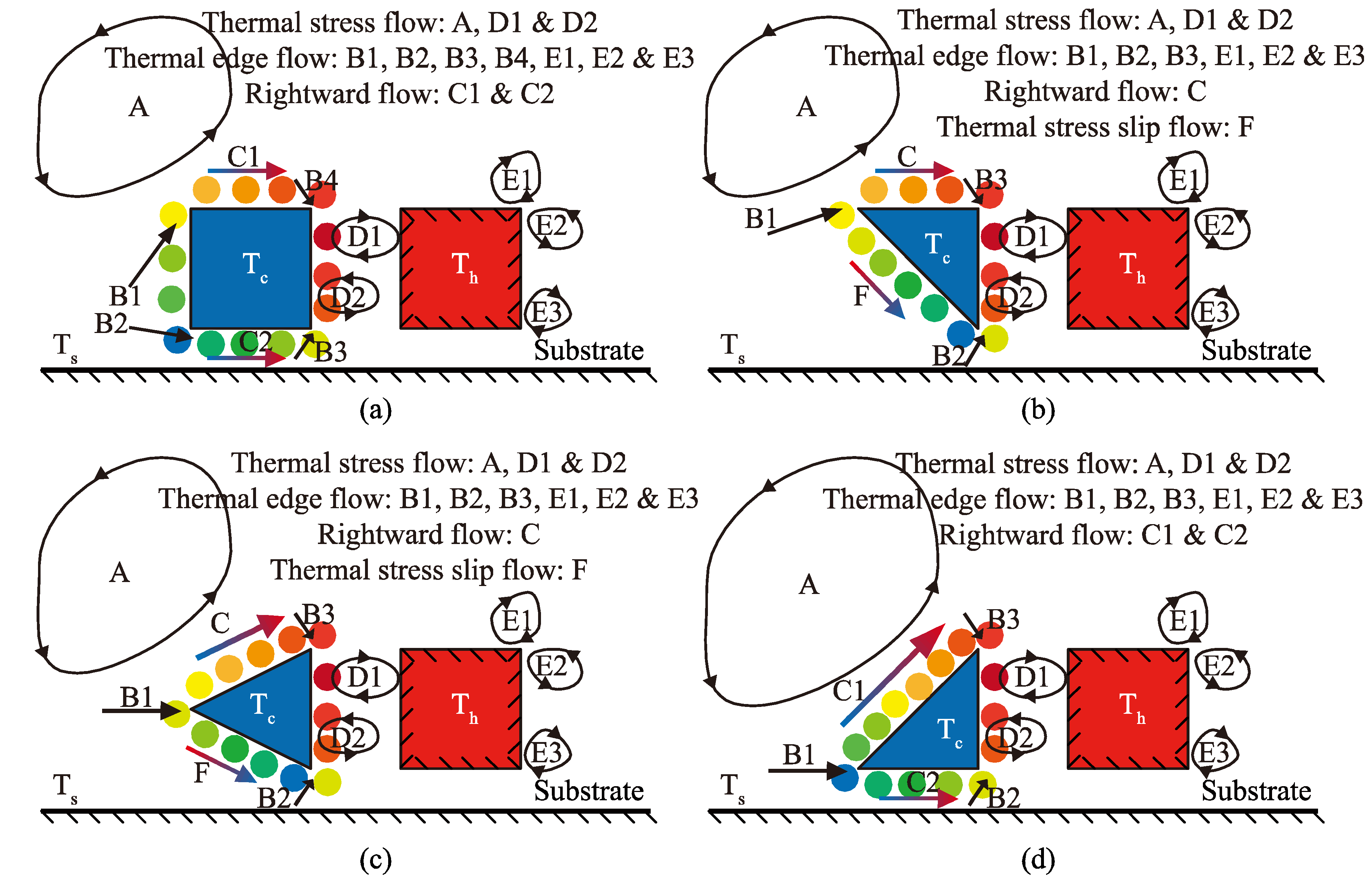
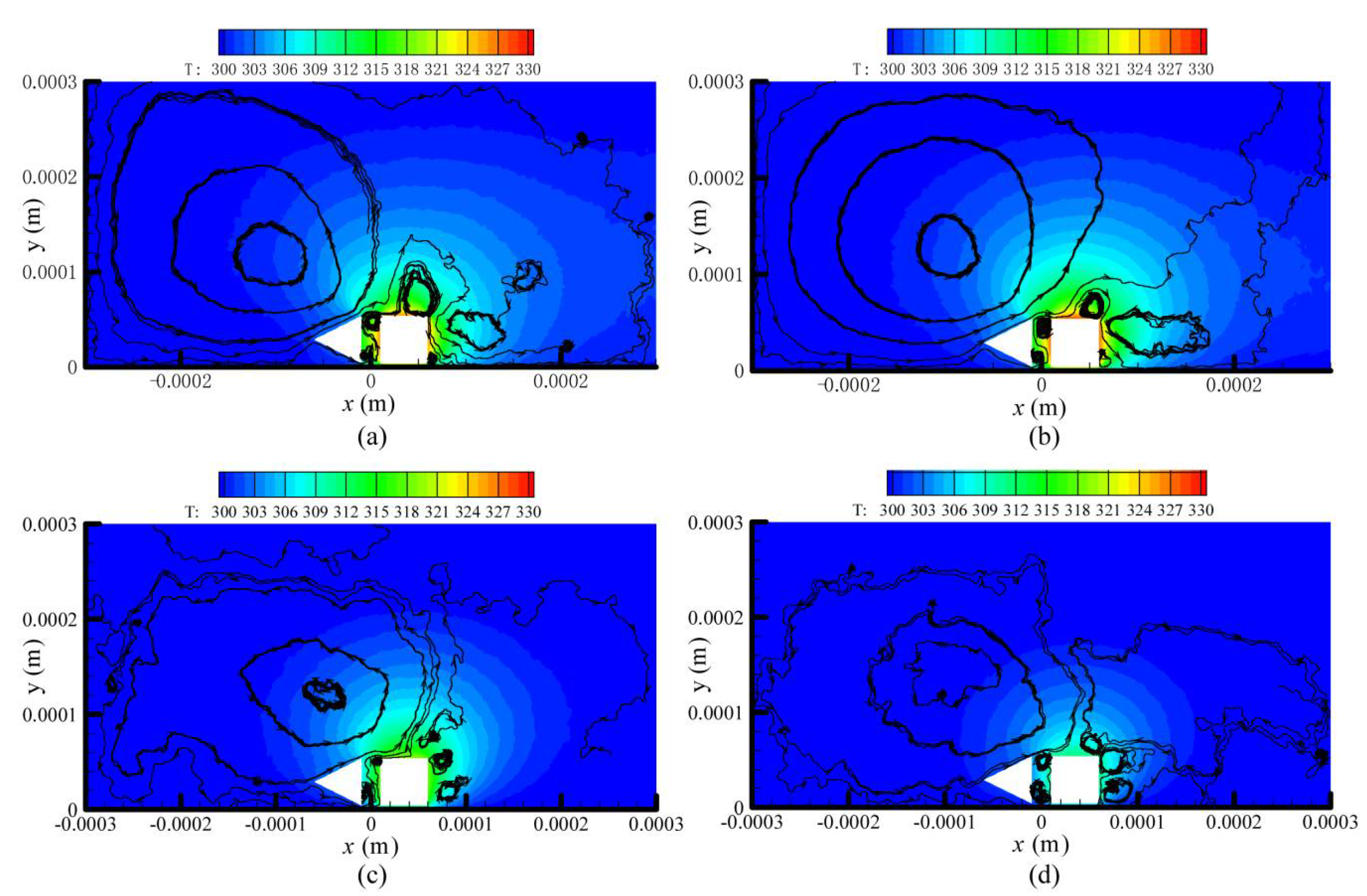
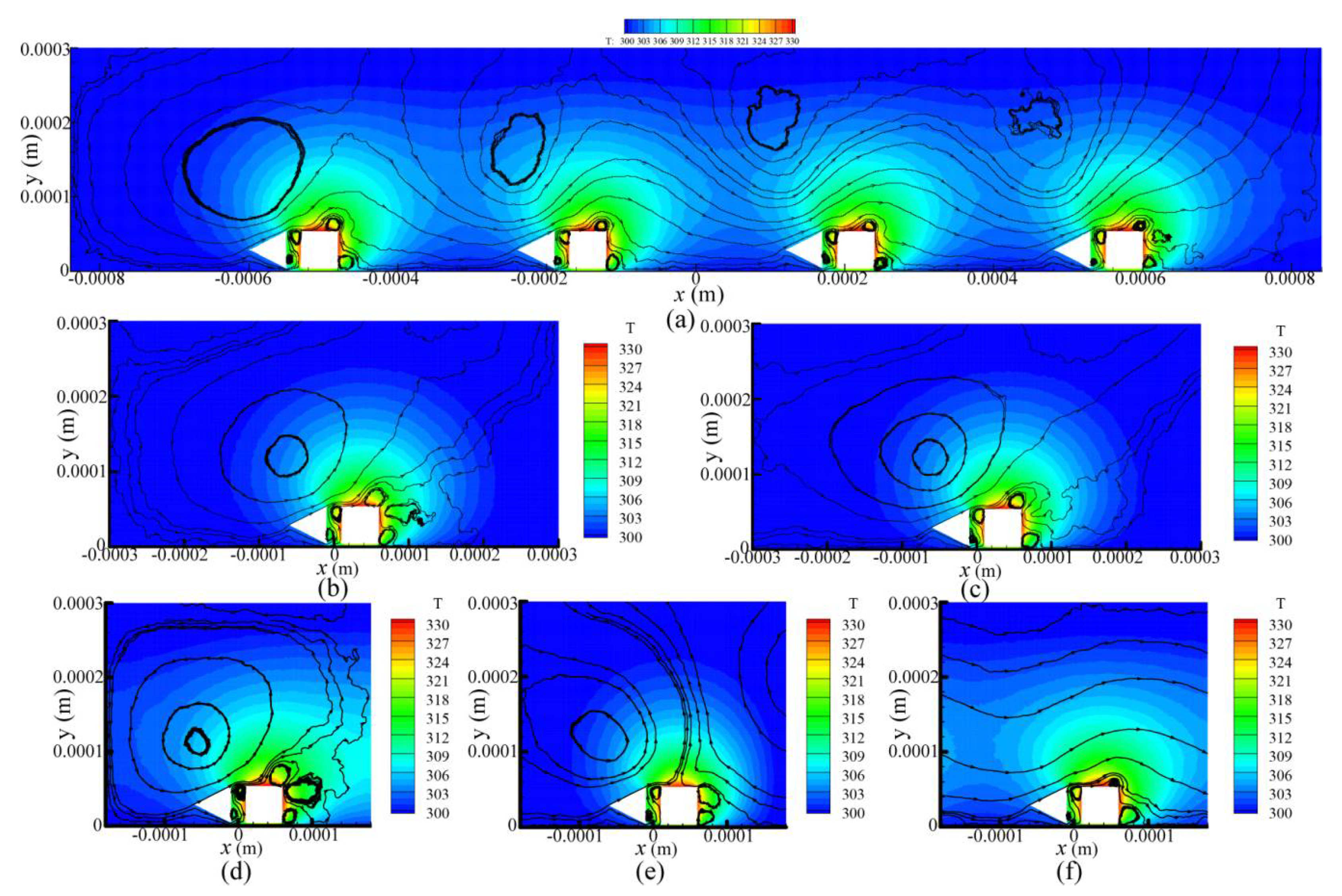
4.1. Flow Mechanism and Patterns
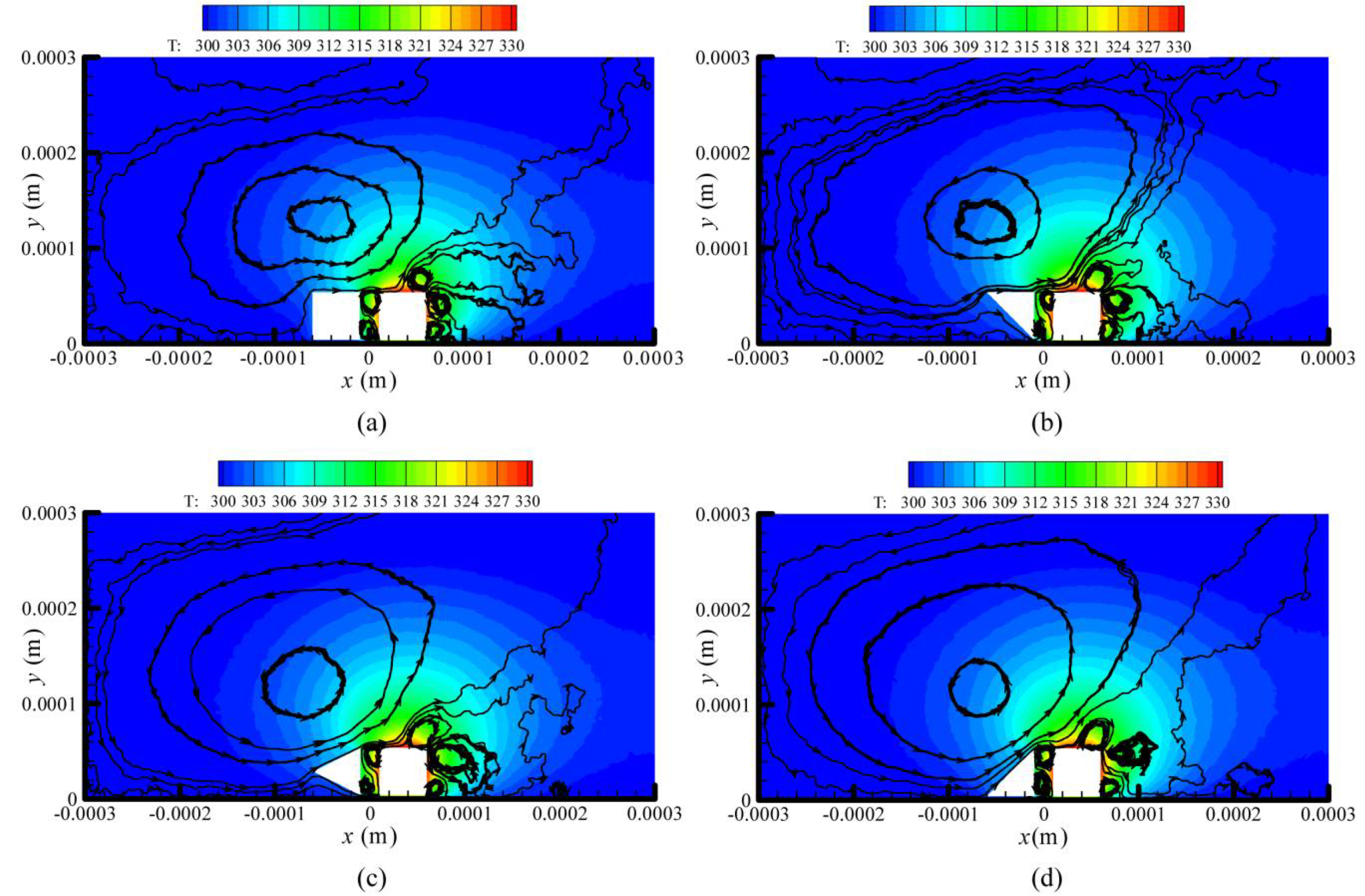
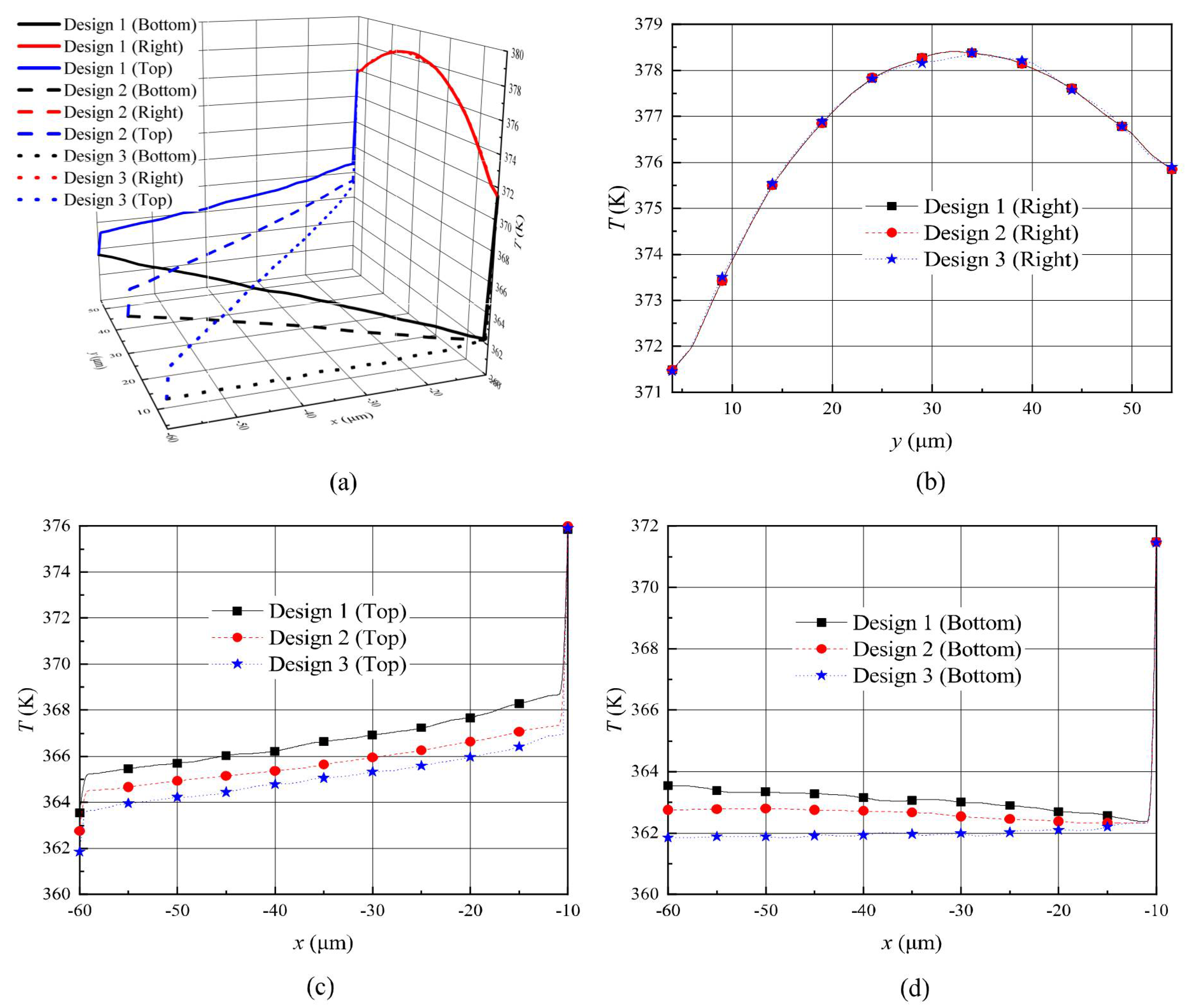
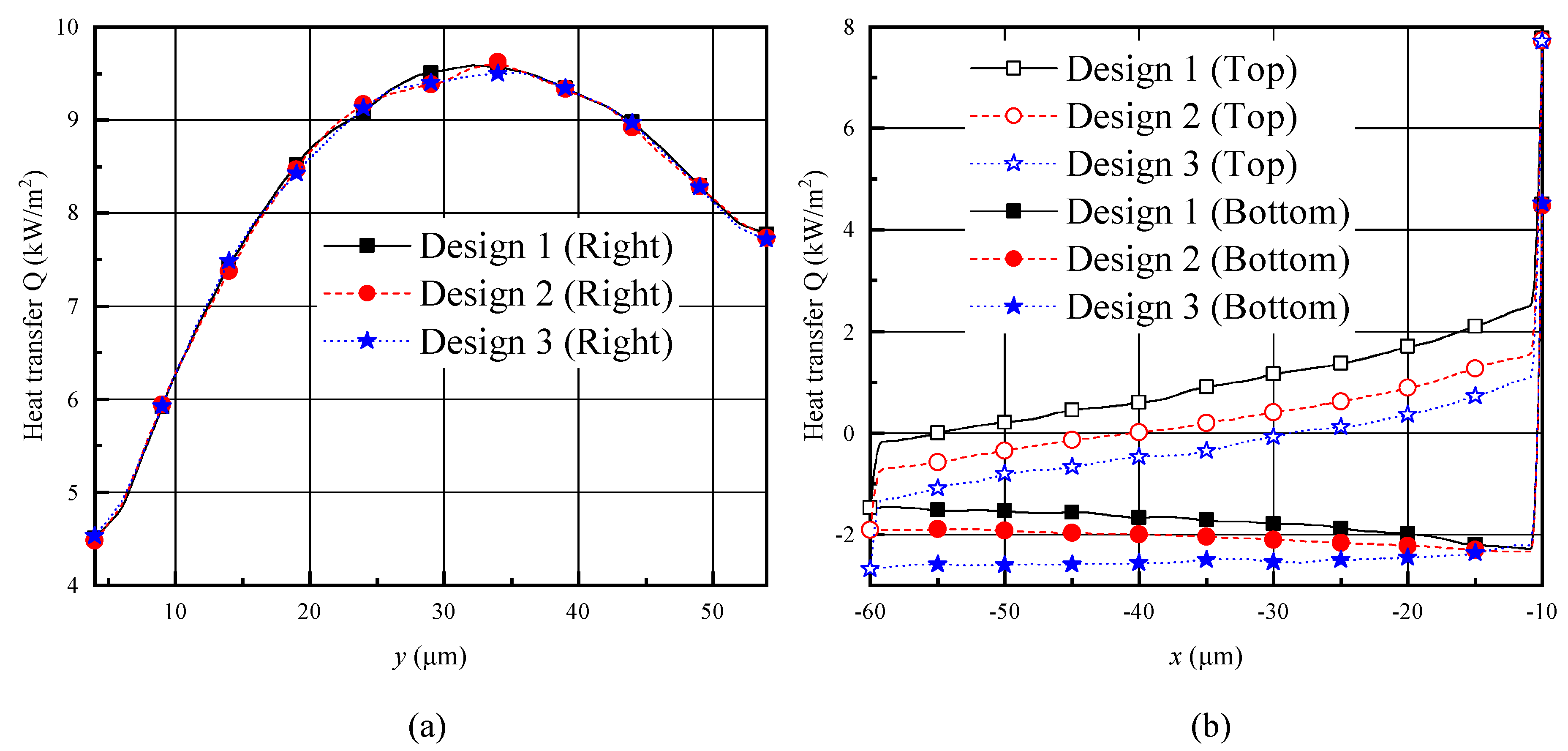
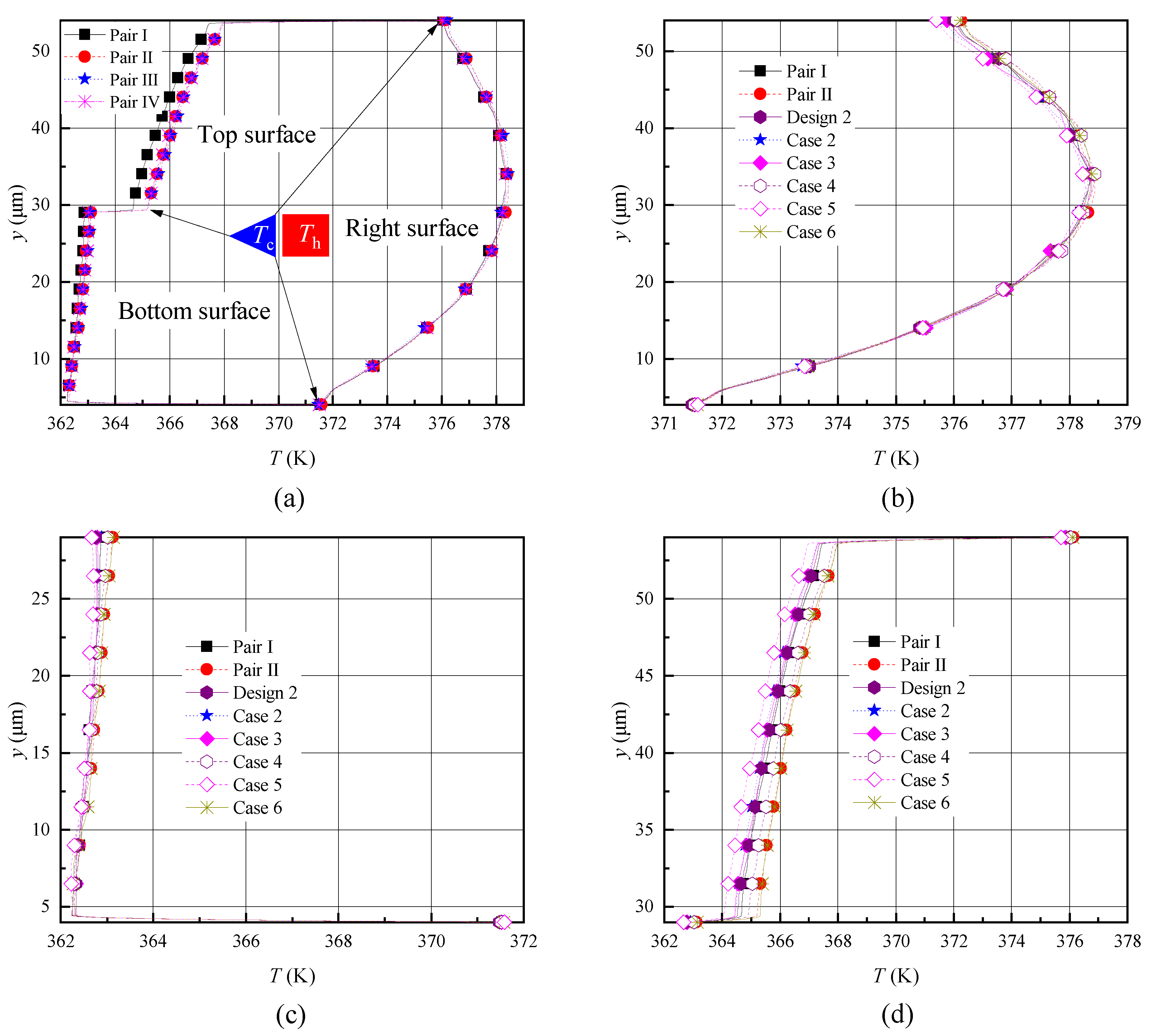
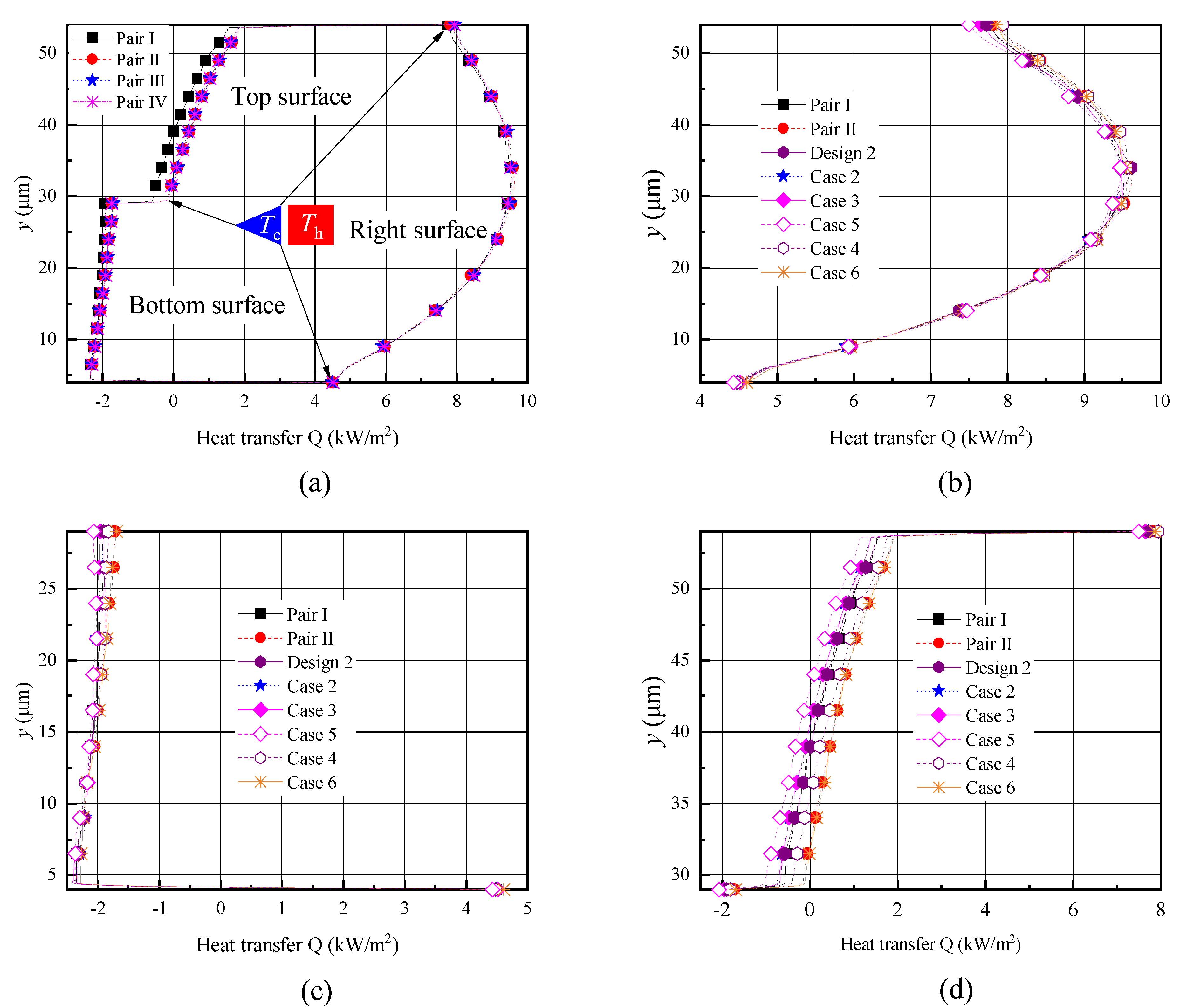
4.2. Temperature and Heat Transfer
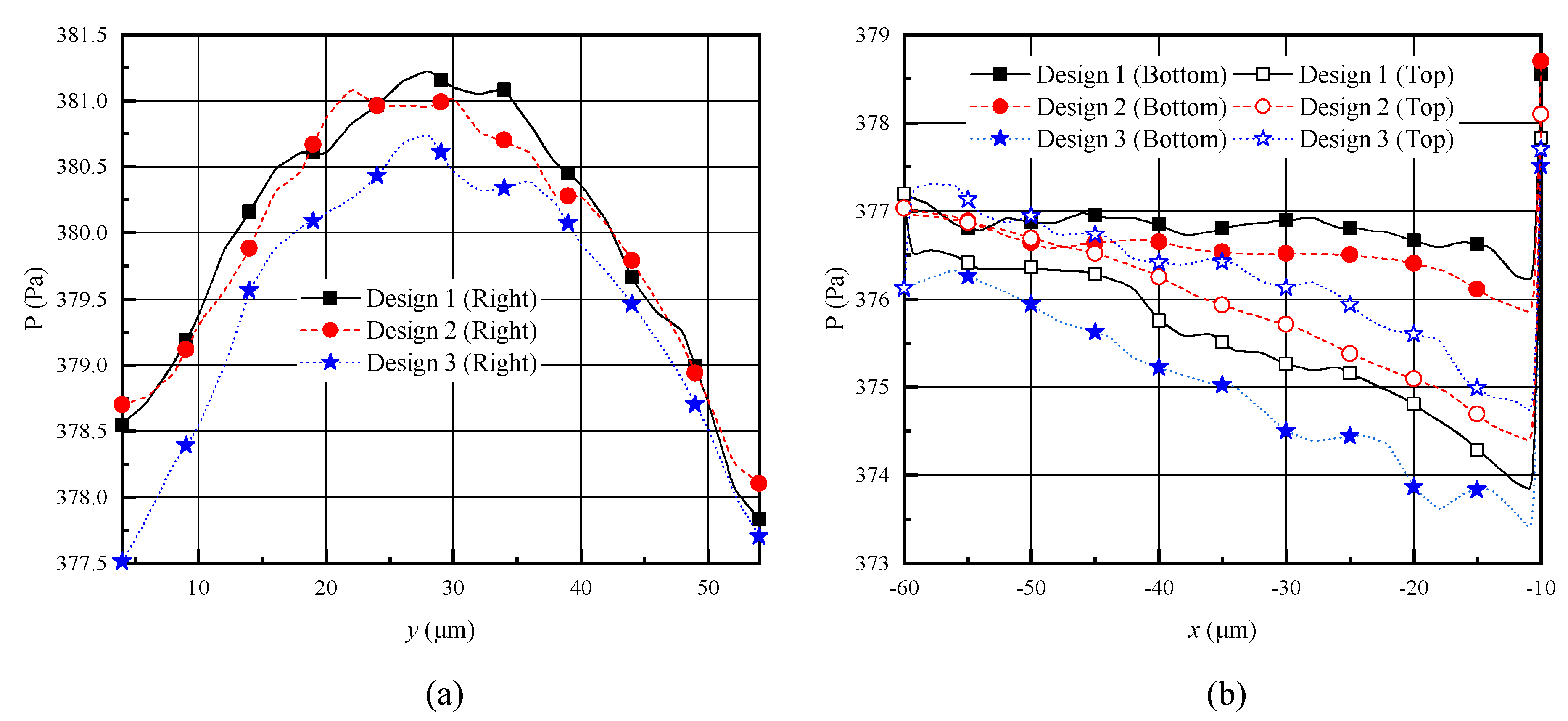
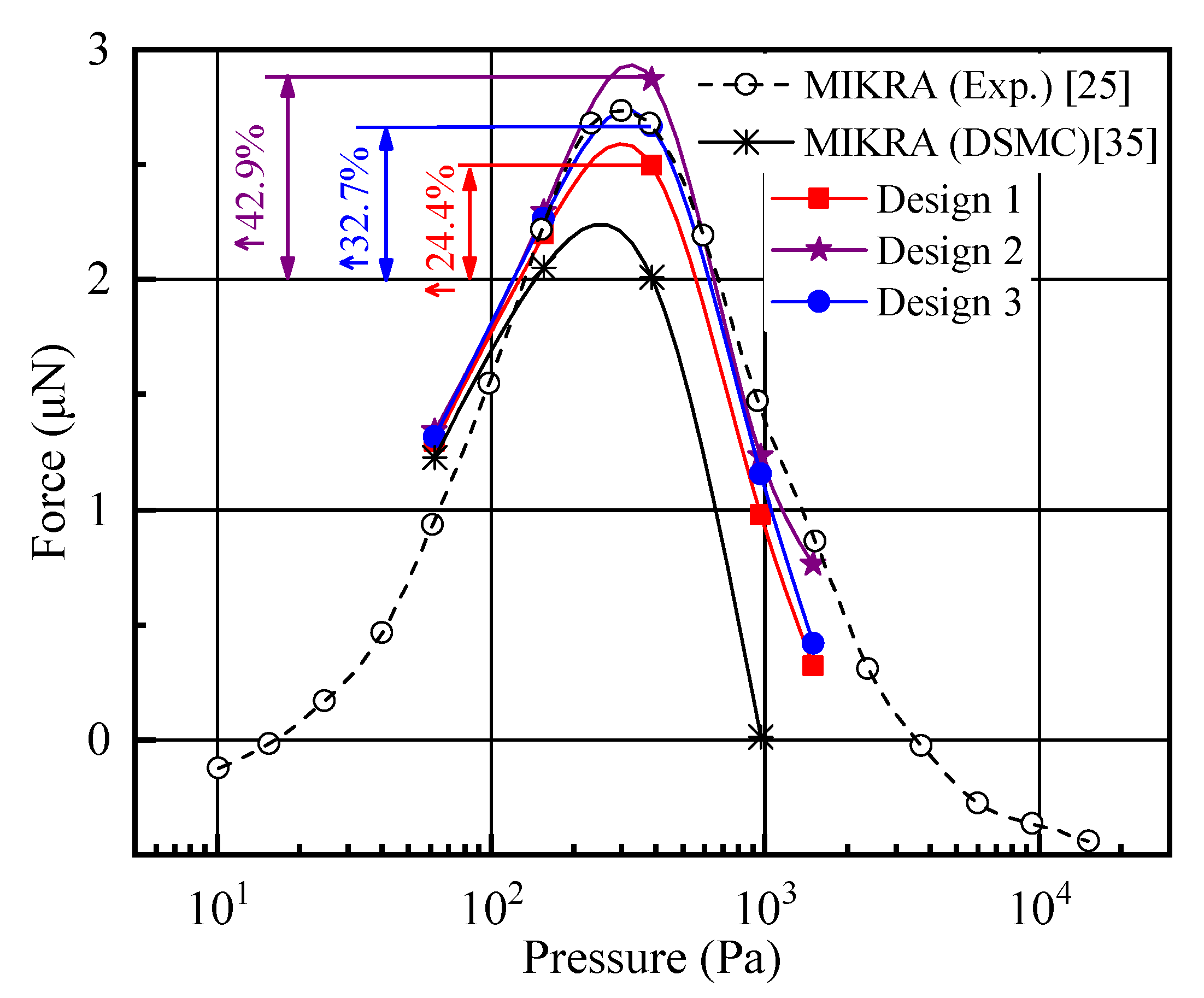
4.3. Pressure Distribution and Knudsen Thermal Force
4.4. Coupling Effects
5. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Crookes, W. On attraction and repulsion resulting from radiation. Phil. Trans. R. Soc. Lond. A 1874, 164, 501–527. [Google Scholar]
- Ketsdever, A.; Gimelshein, N.; Gimelshei, S.; Selden, N. Radiometric phenomena: From the 19th to the 21st century. Vacuum 2012, 86, 1644–1662. [Google Scholar] [CrossRef]
- Passian, A.; Wig, A.; Meriaudeau, F.; Ferrel, T.L.; Thundat, T. Knudsen forces on microcantilevers. J. Appl. Phys. 2002, 92, 6326–6333. [Google Scholar] [CrossRef] [Green Version]
- Passian, A.; Warmack, R.J.; Ferrell, T.L.; Thundat, T. Thermal transpiration at the microscale: A Crookes cantilever. Phys. Rev. Lett. 2003, 90, 124503. [Google Scholar] [CrossRef] [PubMed]
- Gimelshein, N.; Gimelshein, S.; Ketsdever, A.; Selden, N. Impact of vane size and separation on radiometric forces for microactuation. J. Appl. Phys. 2011, 109, 074506. [Google Scholar] [CrossRef] [Green Version]
- Ventura, A.; Gimelshein, N.; Gimelshein, S.; Ketsdever, A. Effect of vane thickness on radiometric force. J. Fluid Mech. 2013, 735, 684–704. [Google Scholar] [CrossRef]
- Gimelshein, N.E.; Gimelshein, S.F.; Ketsdever, A.D.; Selden, N.P. Shear force in radiometric flows. In Proceedings of the AIP Conference, Pacific Grove, CA, USA, 10–15 July 2010; pp. 661–666. [Google Scholar]
- Strongrich, A.D.; O’Neill, W.J.; Cofer, A.G.; Alexeenko, A.A. Experimental measurements and numerical simulations of the Knudsen force on a non-uniformly heated beam. Vacuum 2014, 109, 405–416. [Google Scholar] [CrossRef]
- Vo, D.D.; Moradi, R.; Gerdroodbary, M.B.; Ganji, D.D. Measurement of low-pressure Knudsen force with deflection approximation for gas detection. Results Phys. 2019, 13, 102257. [Google Scholar] [CrossRef]
- Nabeth, J.; Chigullapalli, S.; Alexeenko, A.A. Quantifying the Knudsen force on heated microbeams: A compact model and direct comparison with measurements. Phys. Rev. E 2011, 83, 066306. [Google Scholar] [CrossRef] [Green Version]
- Nakamura, N.; Ueno, T.; Ogi, H. Hydrogen-gas sensing at low concentrations using extremely narrow gap palladium nanoclusters prepared by resistive spectroscopy. J. Appl. Phys. 2019, 126, 225104. [Google Scholar] [CrossRef]
- Mirzaei, A.; Lee, J.H.; Majhi, S.M.; Weber, M.; Bechelany, M.; Kim, H.W.; Kim, S.S. Resistive gas sensors based on metal-oxide nanowires. J. Appl. Phys. 2019, 126, 241102. [Google Scholar] [CrossRef] [Green Version]
- Nie, J.; Wu, Y.; Huang, Q.; Joshi, N.; Li, N.; Meng, X.; Zheng, S.; Zhang, M.; Mi, B.; Lin, L. Dew point measurement using a carbon-based capacitive sensor with active temperature control. ACS Appl. Mater. Interfaces 2018, 11, 1699–1705. [Google Scholar] [CrossRef] [PubMed]
- Joshi, N.; Hayasaka, T.; Liu, Y.; Liu, H.; Oliveira, O.N.; Lin, L. A review on chemiresistive room temperature gas sensors based on metal oxide nanostructures, graphene and 2D transition metal dichalcogenides. Microchim. Acta 2018, 185, 213. [Google Scholar] [CrossRef]
- Pérez Sanjurjo, J.; Prefasi, E.; Buffa, C.; Gaggl, R. A capacitance-to-digital converter for MEMS sensors for smart applications. Sensors 2017, 17, 1312. [Google Scholar] [CrossRef]
- Zhang, M.; Wu, G.; Ren, D.; Gao, R.; Qi, Z.M.; Liang, X. An optical MEMS acoustic sensor based on grating interferometer. Sensors 2019, 19, 1503. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mirzaei, A.; Neri, G. Microwave-assisted synthesis of metal oxide nanostructures for gas sensing application: A review. Sens. Actuator B-Chem. 2016, 237, 749–775. [Google Scholar] [CrossRef]
- Mirzaei, A.; Kim, J.H.; Kim, H.W.; Kim, S.S. Resistive-based gas sensors for detection of benzene, toluene and xylene (BTX) gases: A review. J. Mater. Chem. C 2018, 6, 4342–4370. [Google Scholar] [CrossRef]
- Nazemi, H.; Joseph, A.; Park, J.; Emadi, A. Advanced micro-and nano-gas sensor technology: A review. Sensors 2019, 19, 1285. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hashim, D.A.; Alwan, A.M.; Jawad, M.F. Influence of Ag NPs on silicon nanocolumns NH3 gas sensors. J. Electrochem. Soc. 2018, 165, B773. [Google Scholar] [CrossRef]
- Balasubramani, V.; Chandraleka, S.; Rao, T.S.; Sasikumar, R.; Kuppusamy, M.R.; Sridhar, T.M. Recent advances in electrochemical impedance spectroscopy based toxic gas sensors using semiconducting metal oxides. J. Electrochem. Soc. 2020, 167, 037572. [Google Scholar] [CrossRef]
- Sapsanis, C.; Omran, H.; Chernikova, V.; Shekhah, O.; Belmabkhout, Y.; Buttner, U.; Eddaoudi, M.; Salama, K.N. Insights on capacitive interdigitated electrodes coated with MOF thin films: Humidity and VOCs sensing as a case study. Sensors 2015, 15, 18153–18166. [Google Scholar] [CrossRef]
- Pourteimoor, S.; Haratizadeh, H. Performance of a fabricated nanocomposite-based capacitive gas sensor at room temperature. J. Mater. Sci.-Mater. Electron. 2017, 28, 18529–18534. [Google Scholar] [CrossRef]
- Strongrich, A.; Alexeenko, A. Microstructure actuation and gas sensing by the Knudsen thermal force. Appl. Phys. Lett. 2015, 107, 193508. [Google Scholar] [CrossRef]
- Strongrich, A.; Pikus, A.; Sebastiao, I.B.; Alexeenko, A. Microscale in-plane knudsen radiometric actuator: Design, characterization, and performance modeling. J. Microelectromech. Syst. 2017, 26, 528–538. [Google Scholar] [CrossRef]
- Gerdroodbary, M.B.; Ganji, D.D.; Taeibi-Rahni, M.; Vakilipour, S. Effect of Knudsen thermal force on the performance of low-pressure micro gas sensor. Eur. Phys. J. Plus 2017, 132, 315. [Google Scholar] [CrossRef]
- Gerdroodbary, M.B.; Ganji, D.D.; Taeibi-Rahni, M.; Vakilipour, S. Effect of geometrical parameters on radiometric force in low-pressure MEMS gas actuator. Microsyst. Technol. 2018, 24, 2189–2198. [Google Scholar] [CrossRef]
- Gerdroodbary, M.B.; Mosavat, M.; Ganji, D.D.; Taeibi-Rahni, M.; Moradi, R. Application of molecular force for mass analysis of Krypton/Xenon mixture in low-pressure MEMS gas sensor. Vacuum 2018, 150, 207–215. [Google Scholar] [CrossRef]
- Hassanvand, A.; Gerdroodbary, M.B.; Moradi, R.; Amini, Y. Application of Knudsen thermal force for detection of inert gases. Results Phys. 2018, 9, 351–358. [Google Scholar] [CrossRef]
- Gerdroodbary, M.B.; Anazadehsayed, A.; Hassanvand, A.; Moradi, R. Calibration of low-pressure MEMS gas sensor for detection of hydrogen gas. Int. J. Hydrogen Energy 2018, 43, 5770–5782. [Google Scholar] [CrossRef]
- Gerdroodbary, M.B.; Ganji, D.D.; Shiryanpour, I.; Moradi, R. Mass analysis of CH4/SO2 gas mixture by low-pressure MEMS gas sensor. J. Nat. Gas Sci. Eng. 2018, 53, 317–328. [Google Scholar] [CrossRef]
- Gerdroodbary, M.B.; Ganji, D.D.; Moradi, R.; Abdollahi, A. Application of Knudsen thermal force for detection of CO2 in low-pressure micro gas sensor. Fluid Dyn. 2018, 53, 812–823. [Google Scholar] [CrossRef]
- Mahyari, A.; Gerdroodbary, M.B.; Mosavat, M.; Ganji, D.D. Detection of ammonia gas by Knudsen thermal force in micro gas actuator. Case Stud. Therm. Eng. 2018, 12, 276–284. [Google Scholar] [CrossRef]
- Zheng, Y.; Manh, T.D.; Nam, N.D.; Gerdroodbary, M.B.; Moradi, R.; Tlili, I. Optimization of micro Knudsen gas sensor for high precision detection of SO2 in natural gas. Results Phys. 2020, 16, 102933. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, W.; Su, T.; Zhang, S.; Zhang, Z. Numerical investigation into the low-pressure detection sensor performance of hydrogen gas with variable soft sphere molecular model. Int. J. Hydrogen Energy 2020, 45, 7243–7253. [Google Scholar] [CrossRef]
- Pikus, A.; Sebastião, I.B.; Strongrich, A.; Alexeenko, A. Characterization of a Knudsen force based vacuum sensor for N2-H2O gas mixtures. Vacuum 2019, 161, 130–137. [Google Scholar] [CrossRef]
- Li, Z.; Gerdroodbary, M.B.; Valipour, P.; Moradi, R.; Babazadeh, H. The optimization via response surface method for micro hydrogen gas actuator. Int. J. Hydrogen Energy 2019, 44, 31633–31643. [Google Scholar] [CrossRef]
- Pikus, A.; Sebastiao, I.; Strongrich, A.; Alexeenko, A. DSMC simulation of microstructure actuation by Knudsen thermal forces including binary mixtures. In Proceedings of the AIP Conference, Victoria, CB, Canada, 10–15 July 2016; p. 080003. [Google Scholar]
- Bird, G.A. Molecular Gas Dynamics and the Direct Simulation of Gas Flows; Clarendon Press: Oxford, UK, 1994. [Google Scholar]
- Roohi, E.; Shahabi, V.; Bagherzadeh, A. On the vortical characteristics and cold-to-hot transfer of rarefied gas flow in a lid driven isosceles orthogonal triangular cavity with isothermal walls. Int. J. Therm. Sci. 2018, 125, 381–394. [Google Scholar] [CrossRef]
- Balaj, M.; Roohi, E.; Akhlaghi, H. Effects of shear work on non-equilibrium heat transfer characteristics of rarefied gas flows through micro/nanochannels. Int. J. Heat Mass Transf. 2015, 83, 69–74. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Zhao, L.; Zhang, S.; Zhao, F. Study of flow characteristics of gas mixtures in a rectangular Knudsen pump. Micromachines 2019, 10, 79. [Google Scholar] [CrossRef] [Green Version]
- Lotfian, A.; Roohi, E. Radiometric flow in periodically patterned channels: Fluid physics and improved configurations. J. Fluid Mech. 2019, 860, 544–576. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Z.; Zhang, W.; Zhang, P.; Zhang, S. Numerical simulation of thermal edge flow in ratchet-like periodically patterned micro-channels. Int. J. Heat Mass Transf. 2019, 135, 1023–1038. [Google Scholar] [CrossRef]
- White, C.; Borg, M.K.; Scanlon, T.J.; Longshaw, S.M.; John, B.; Emerson, D.R.; Reese, J.M. dsmcFoam+: An OpenFOAM based direct simulation Monte Carlo solver. Comput. Phys. Commun. 2018, 224, 22–43. [Google Scholar] [CrossRef]
- Scanlon, T.J.; Roohi, E.; White, C.; Reese, J.M. An open source, parallel DSMC code for rarefied gas flows in arbitrary geometries. Comput. Fluids 2010, 39, 2078–2089. [Google Scholar] [CrossRef] [Green Version]
- Borgnakke, C.; Larsen, P.S. Statistical collision model for Monte Carlo simulation of polyatomic gas mixture. J. Comput. Phys. 1975, 18, 405–420. [Google Scholar] [CrossRef]
- Sone, Y. Molecular Gas Dynamics: Theory, Techniques, and Applications; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Ye, J.; Shao, J.; Hao, Z.; Salem, S.; Zhang, Y.; Wang, Y.; Li, Z. Characteristics of thermal transpiration effect and the hydrogen flow behaviors in the microchannel with semicircular obstacle. Int. J. Hydrogen Energy 2019, 44, 29724–29732. [Google Scholar] [CrossRef]
- Shao, J.; Ye, J.; Zhang, Y.; Salem, S.; Zhao, Z.; Yu, J. Effect of the microchannel obstacles on the pressure performance and flow behaviors of the hydrogen Knudsen compressor. Int. J. Hydrogen Energy 2019, 44, 22691–22703. [Google Scholar] [CrossRef]
- McNamara, S.; Gianchandani, Y.B. On-chip vacuum generated by a micromachined Knudsen pump. J. Microelectromech. Syst. 2005, 14, 741–746. [Google Scholar] [CrossRef]
- An, S.; Gupta, N.K.; Gianchandani, Y.B. A Si-micromachined 162-stage two-part Knudsen pump for on-chip vacuum. J. Microelectromech. Syst. 2013, 23, 406–416. [Google Scholar] [CrossRef]
- Wang, X.; Su, T.; Zhang, W.; Zhang, Z.; Zhang, S. Knudsen pumps: A review. Microsyst. Nanoeng. 2020, 6, 26. [Google Scholar] [CrossRef]
- An, S.; Qin, Y.; Gianchandani, Y.B. A monolithic high-flow Knudsen pump using vertical Al2O3 channels in SOI. J. Microelectromech. Syst. 2015, 24, 1606–1615. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pressure P (Pa) | |||
|---|---|---|---|
| 62 | 4.634 | 304.5 | 348 |
| 155 | 1.853 | 304.5 | 346 |
| 387 | 0.742 | 304.5 | 342 |
| 966 | 0.296 | 303 | 323 |
| 1500 | 0.184 | 302 | 313 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Zhang, Z.; Zhang, W.; Su, T.; Zhang, S. Impact of Improved Design on Knudsen Force for Micro Gas Sensor. Micromachines 2020, 11, 634. https://doi.org/10.3390/mi11070634
Wang X, Zhang Z, Zhang W, Su T, Zhang S. Impact of Improved Design on Knudsen Force for Micro Gas Sensor. Micromachines. 2020; 11(7):634. https://doi.org/10.3390/mi11070634
Chicago/Turabian StyleWang, Xiaowei, Zhijun Zhang, Wenqing Zhang, Tianyi Su, and Shiwei Zhang. 2020. "Impact of Improved Design on Knudsen Force for Micro Gas Sensor" Micromachines 11, no. 7: 634. https://doi.org/10.3390/mi11070634