A Review of Passive Micromixers with a Comparative Analysis



Abstract
:1. Introduction
2. Mixing Mechanisms of Micromixer Types and Selected Micromixers
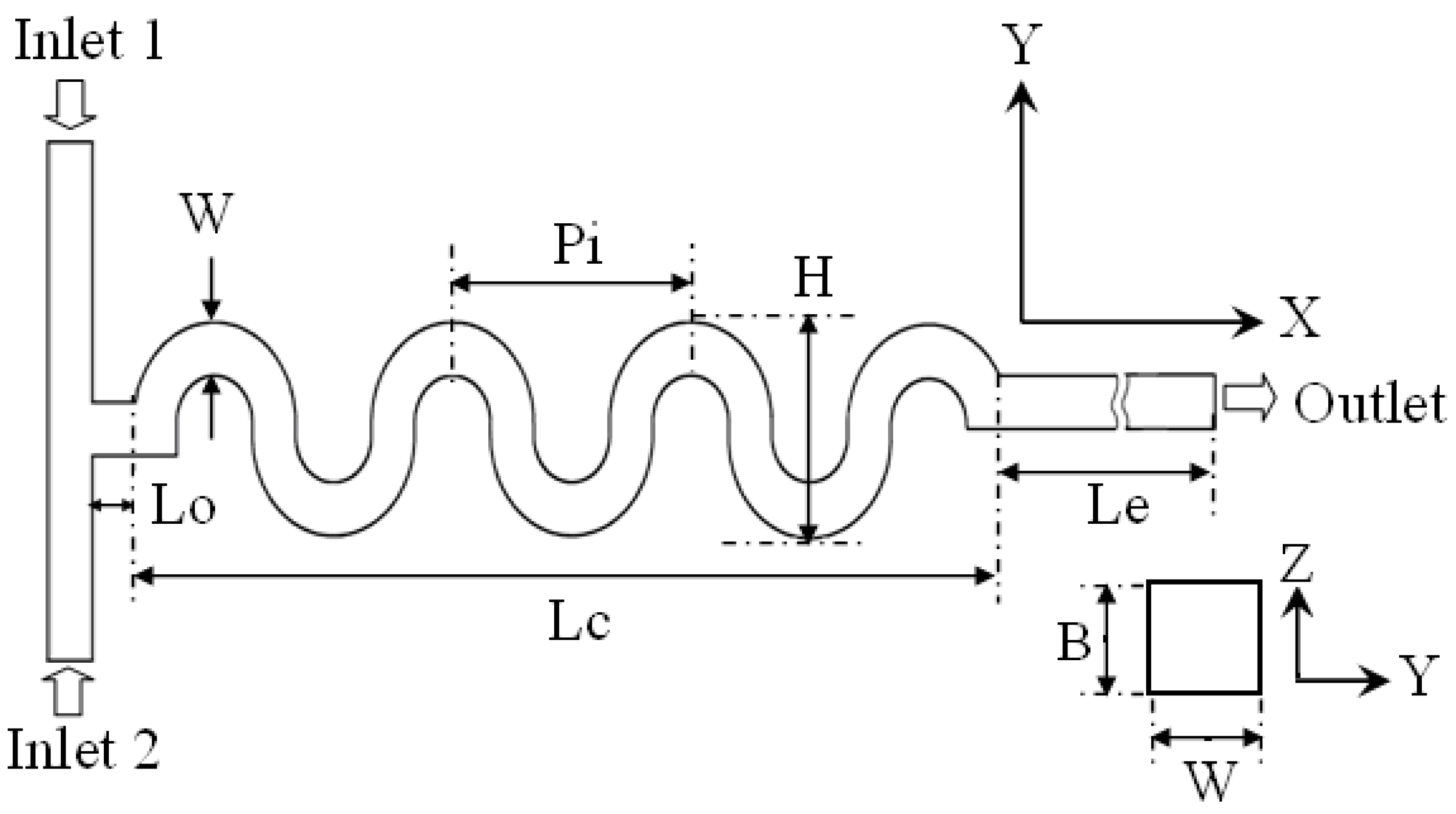
2.1. 2D Designs Using Serpentine, Spiral, and Curved Helical Channels (Type 1)
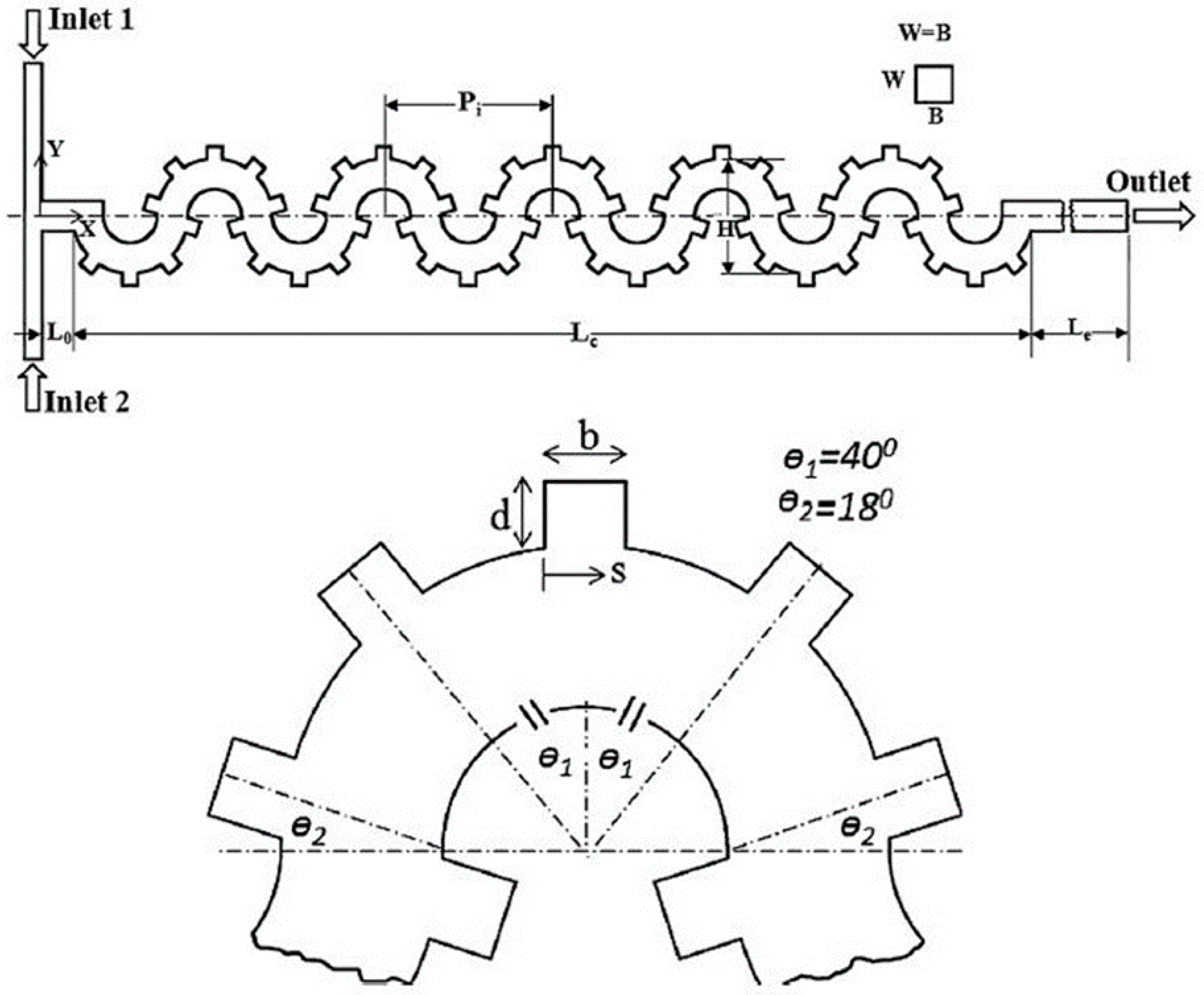
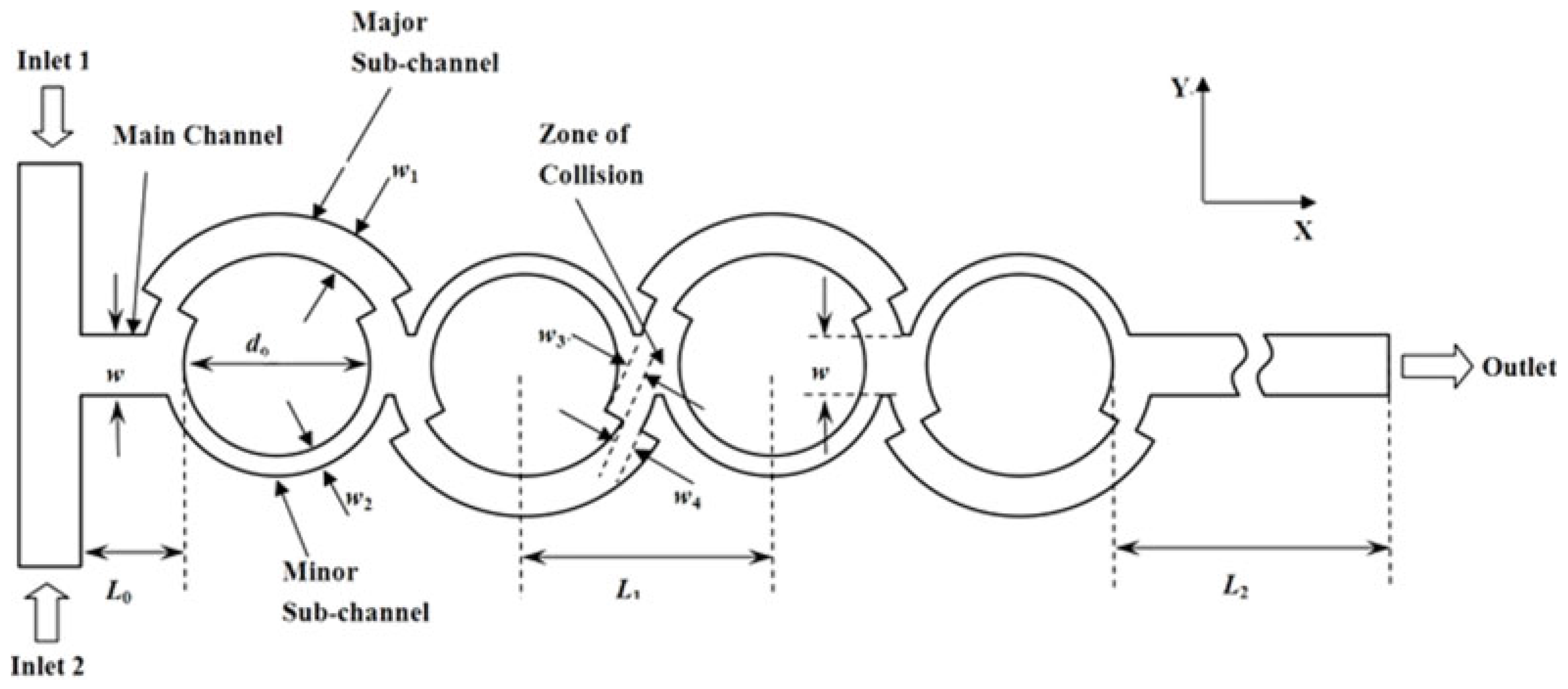
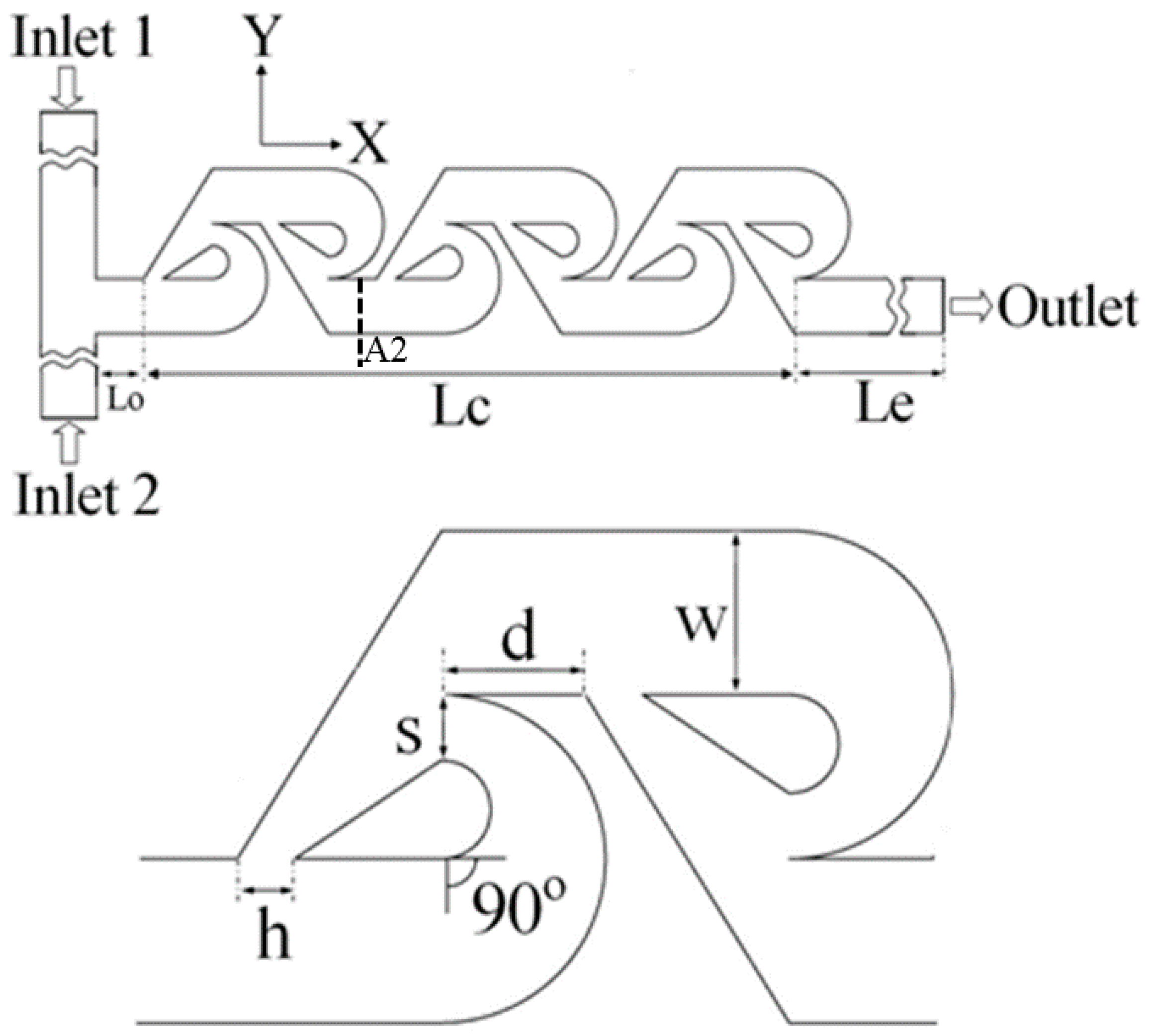
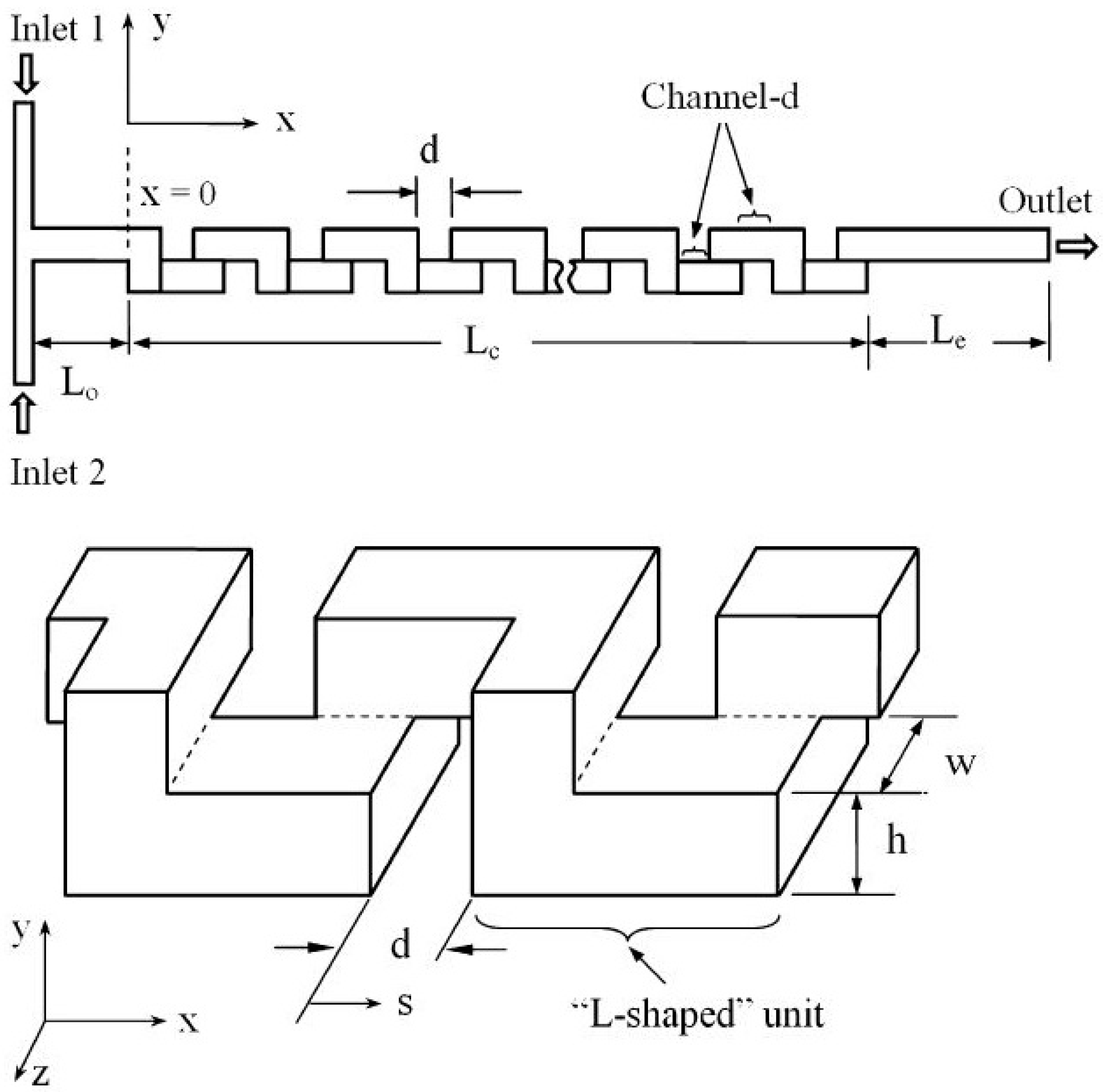
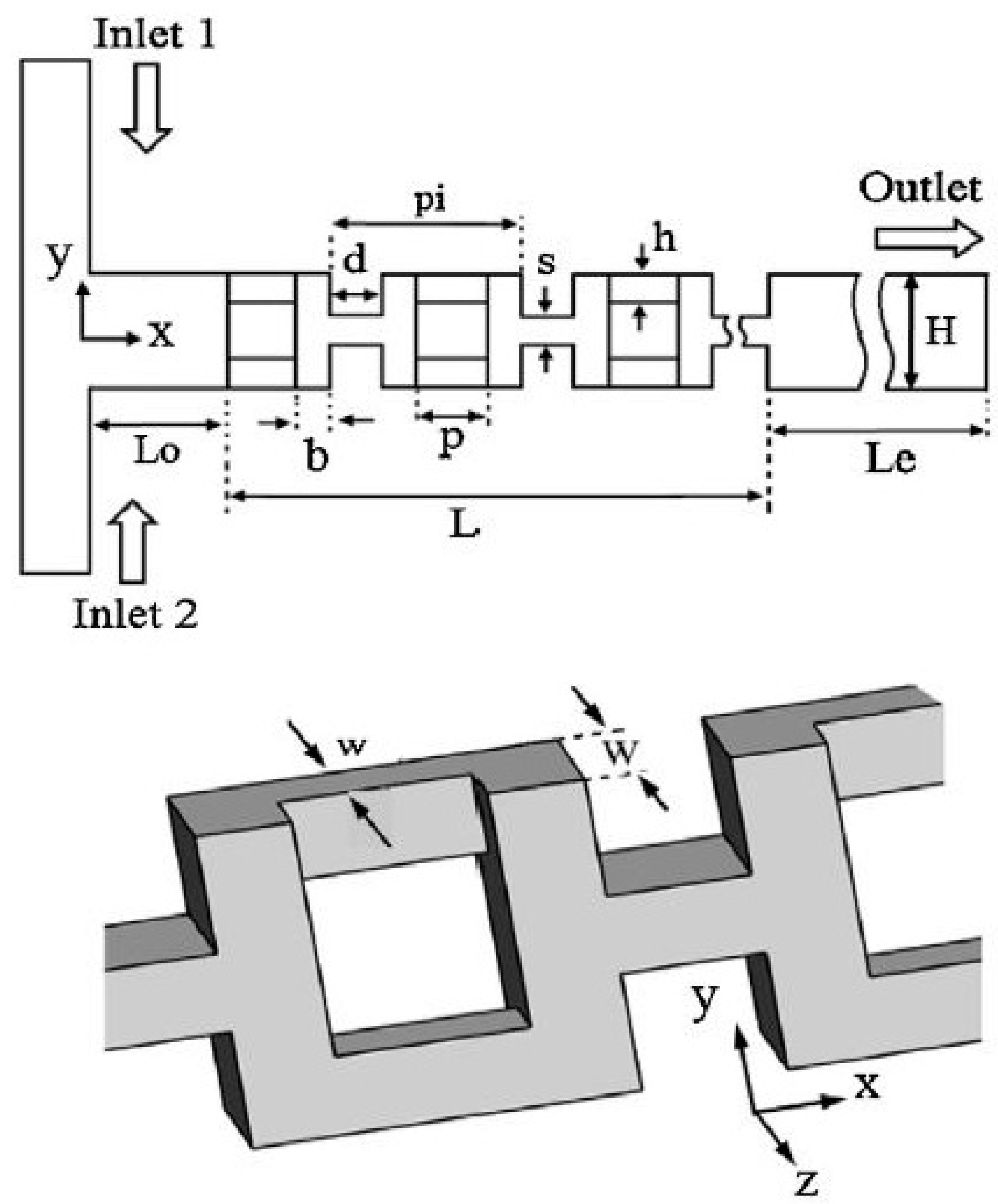
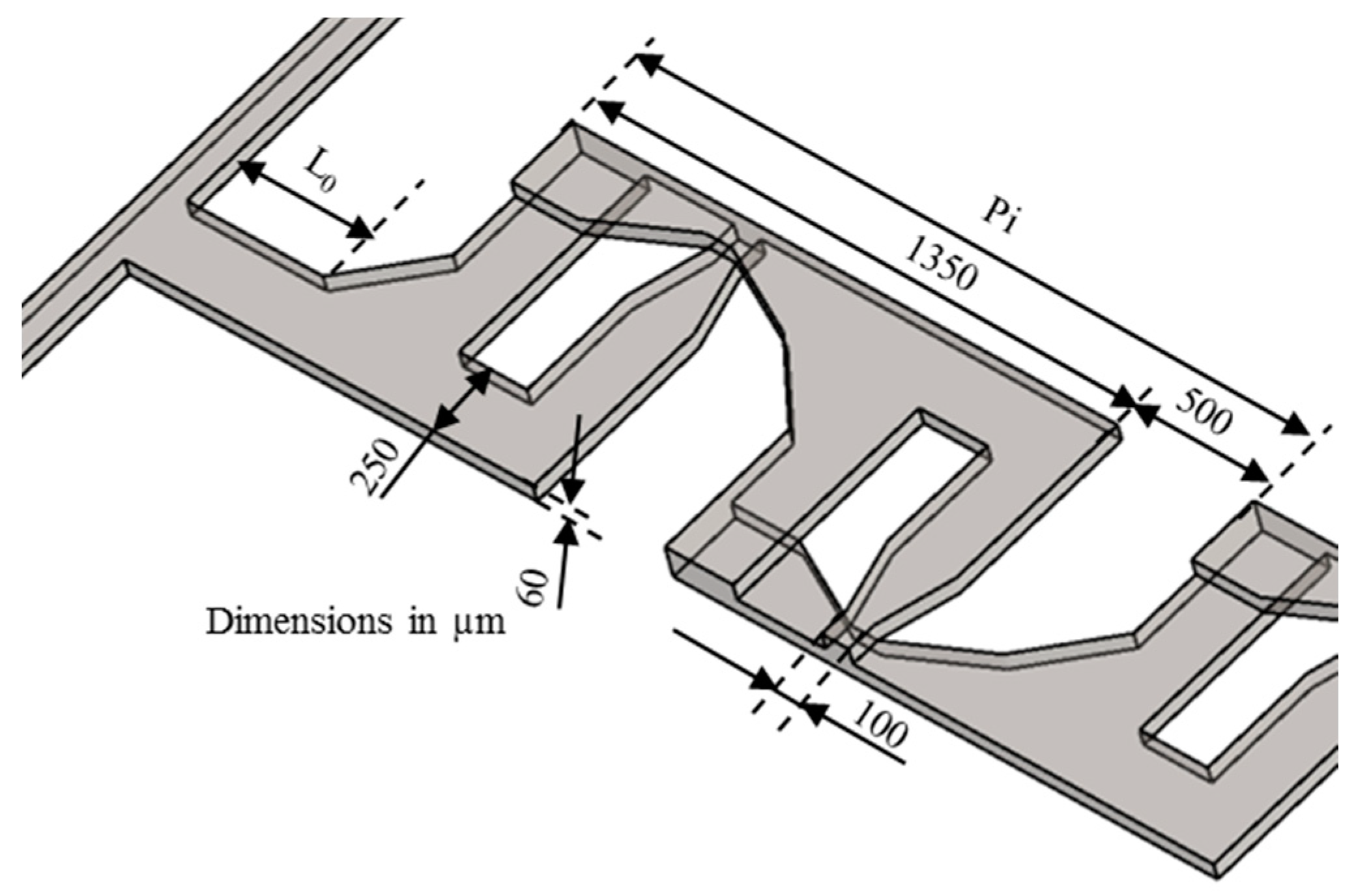
2.2. 2D Designs with SAR Structures (Type 2)
2.3. 3D Design with Serpentine and/or SAR Structures (Type 3)
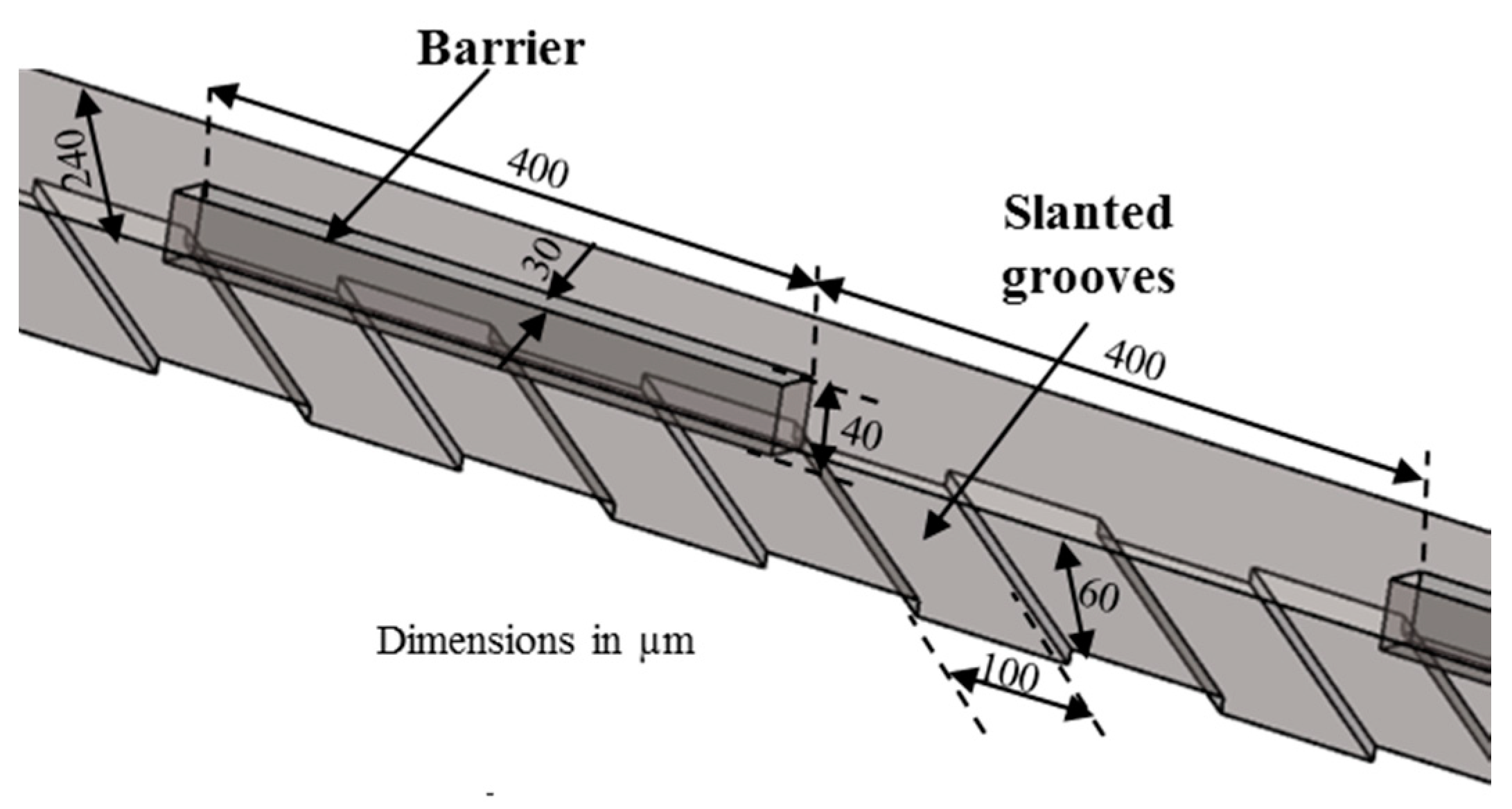
2.4. 3D Design with Patterned Grooves (Type 4)
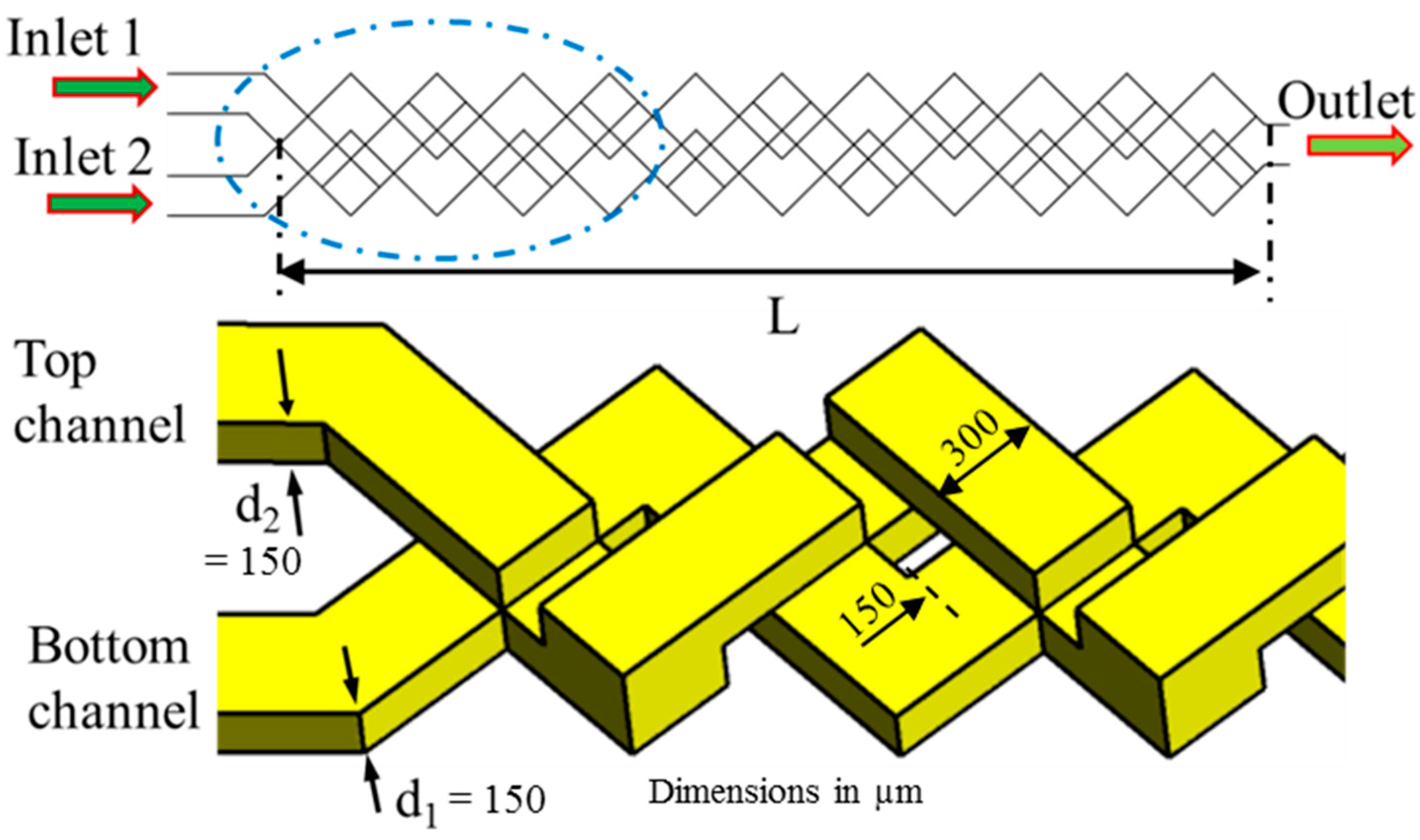
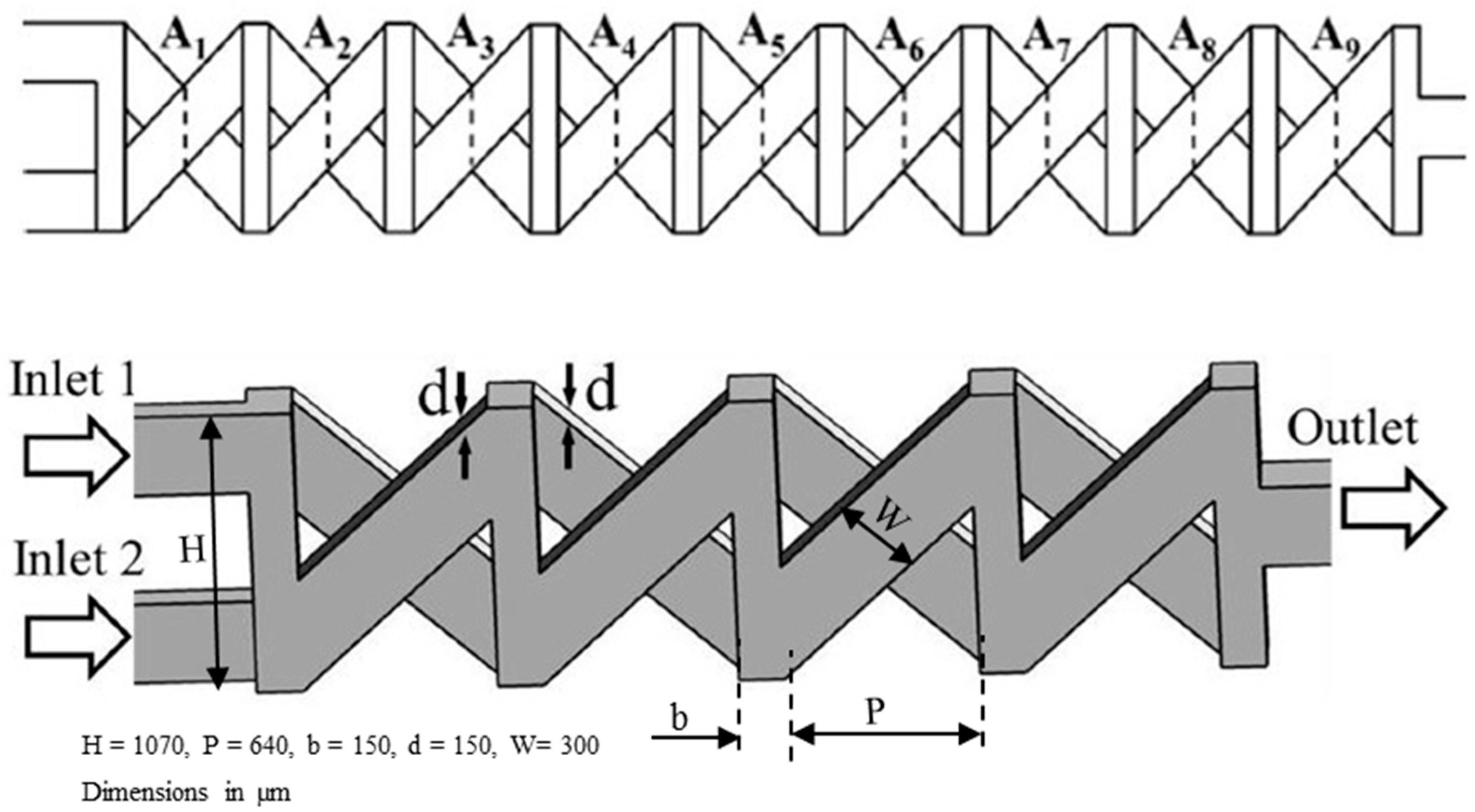
2.5. 3D Designs with SAR Two-Layer Crossing Channels (Type 5)
3. Analysis Methods
4. Results and Discussion
4.1. Grid Refinement Test
4.2. Quantitative Comparisons in Different Reynolds Number Ranges
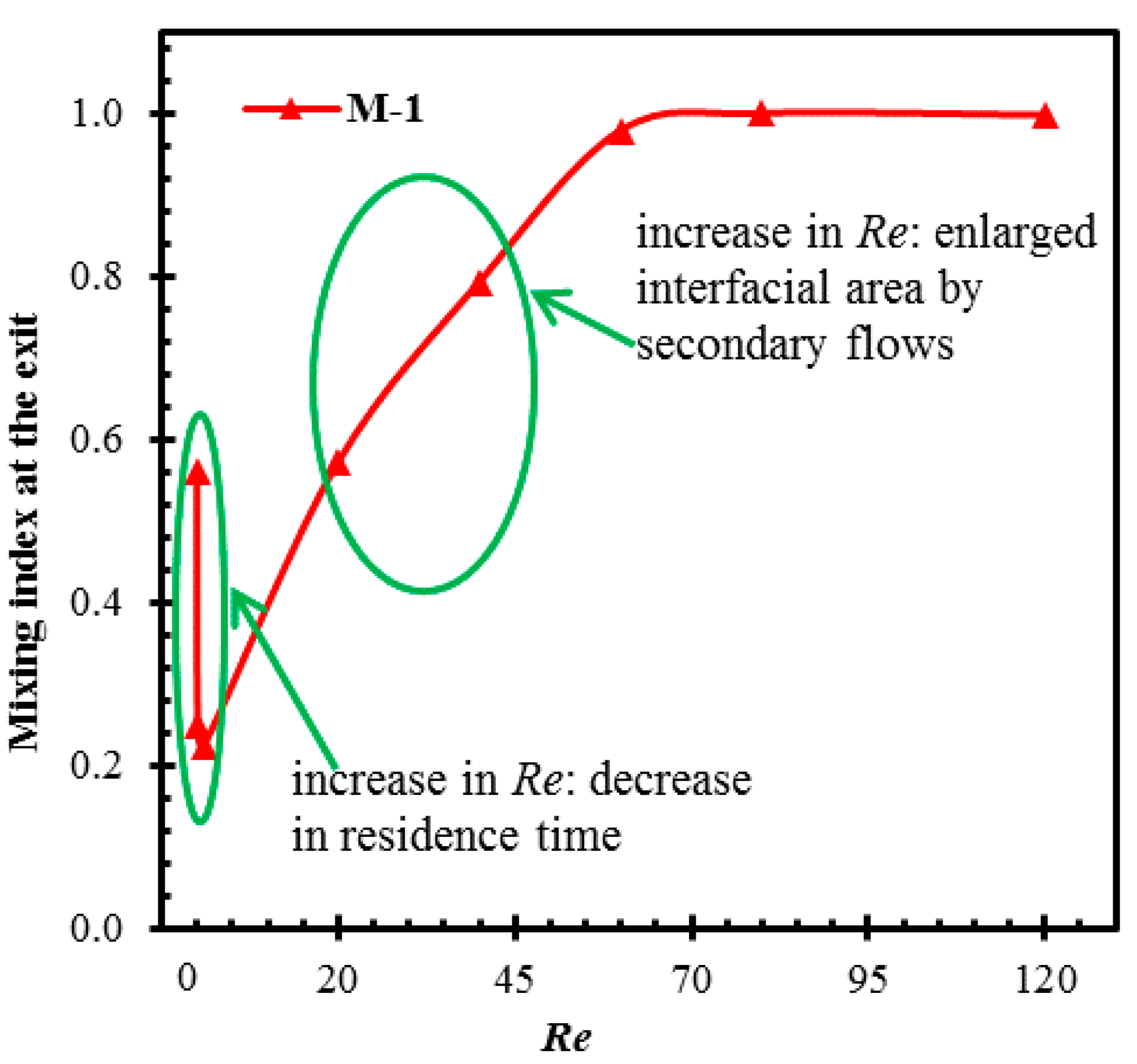
4.2.1. Mixing in Low-Re Range (Re ≤ 1)
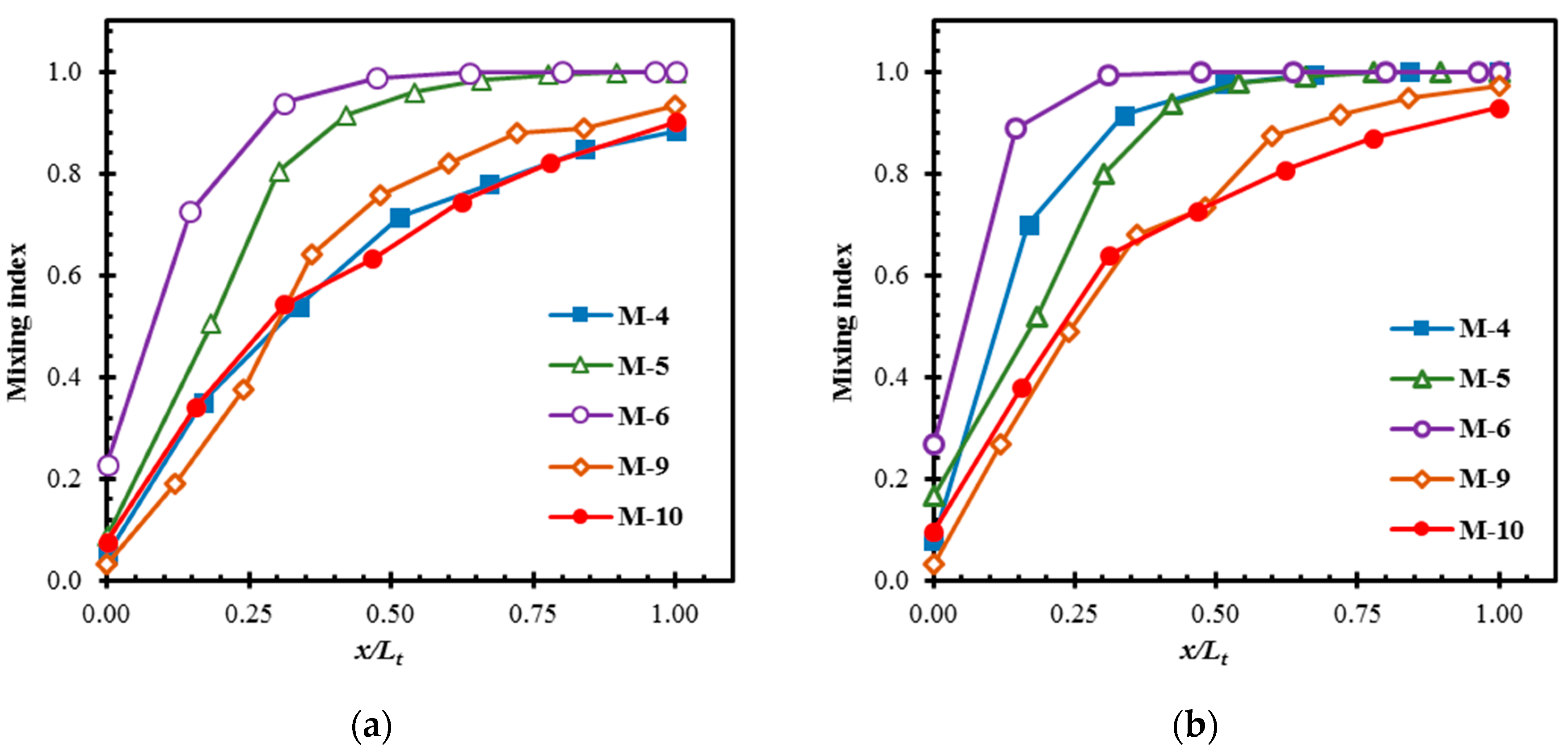
4.2.2. Mixing at Intermediate Reynolds Numbers (1 < Re ≤ 40)
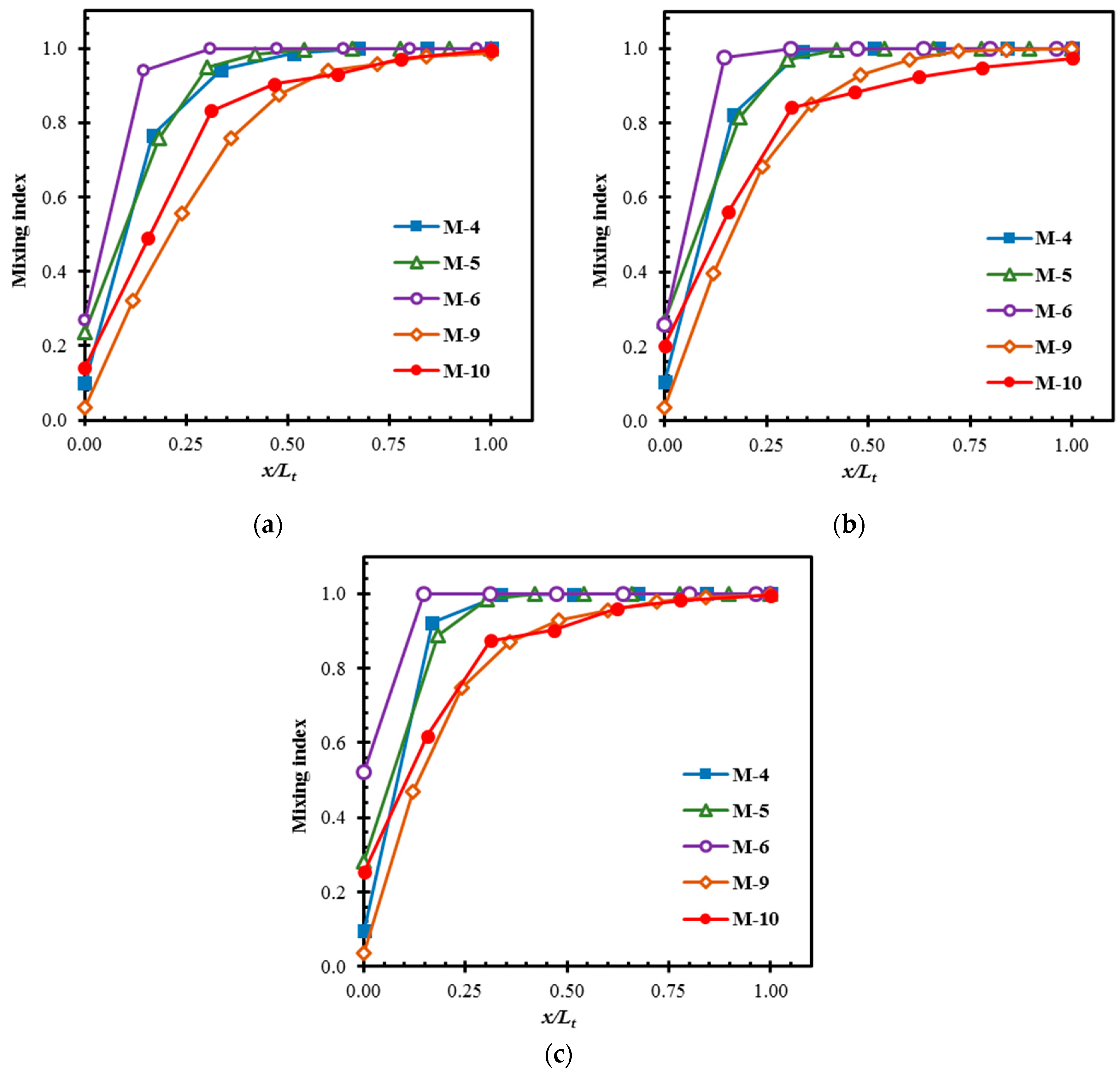
4.2.3. Mixing at High Reynolds Numbers (Re > 40)
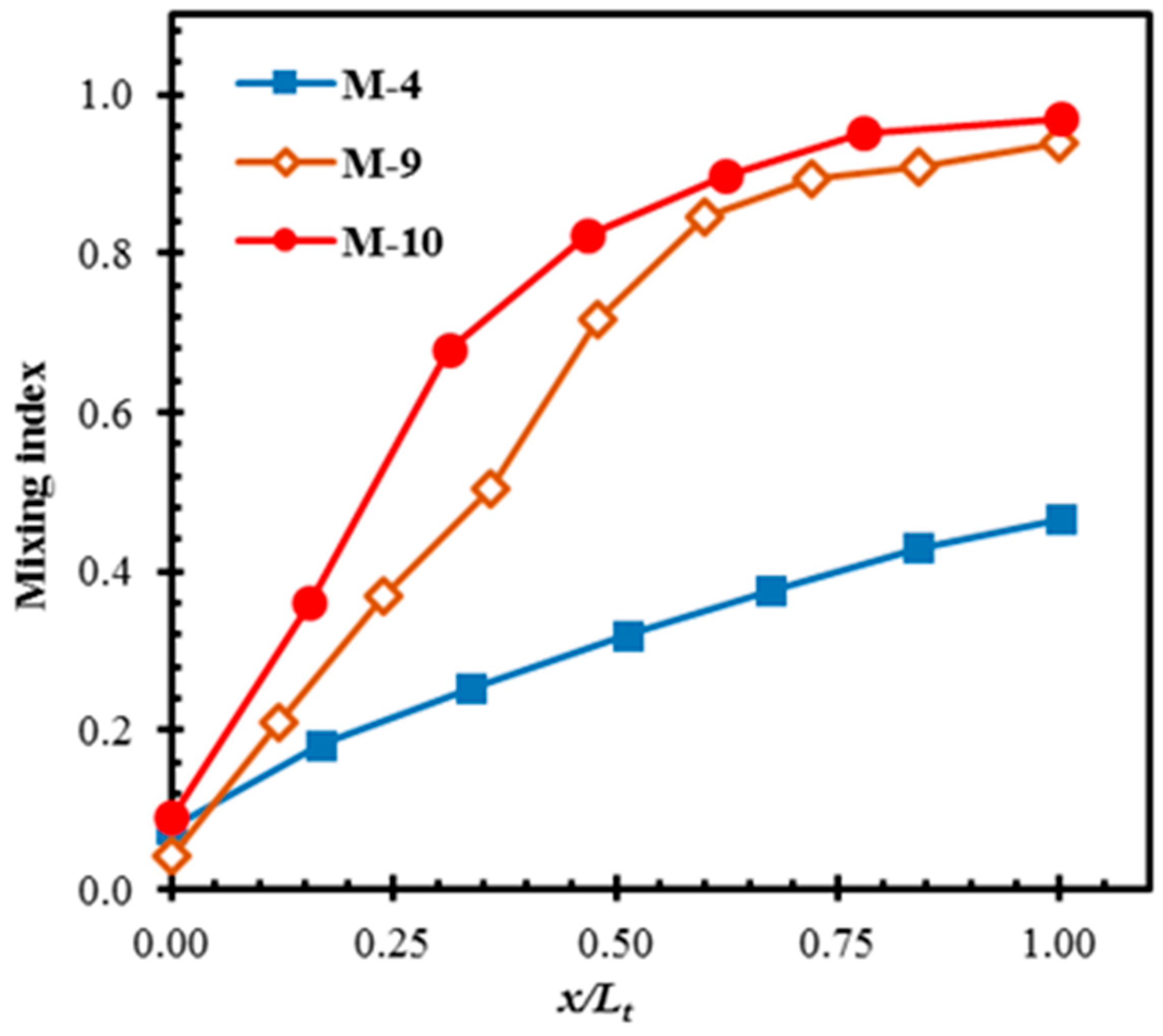
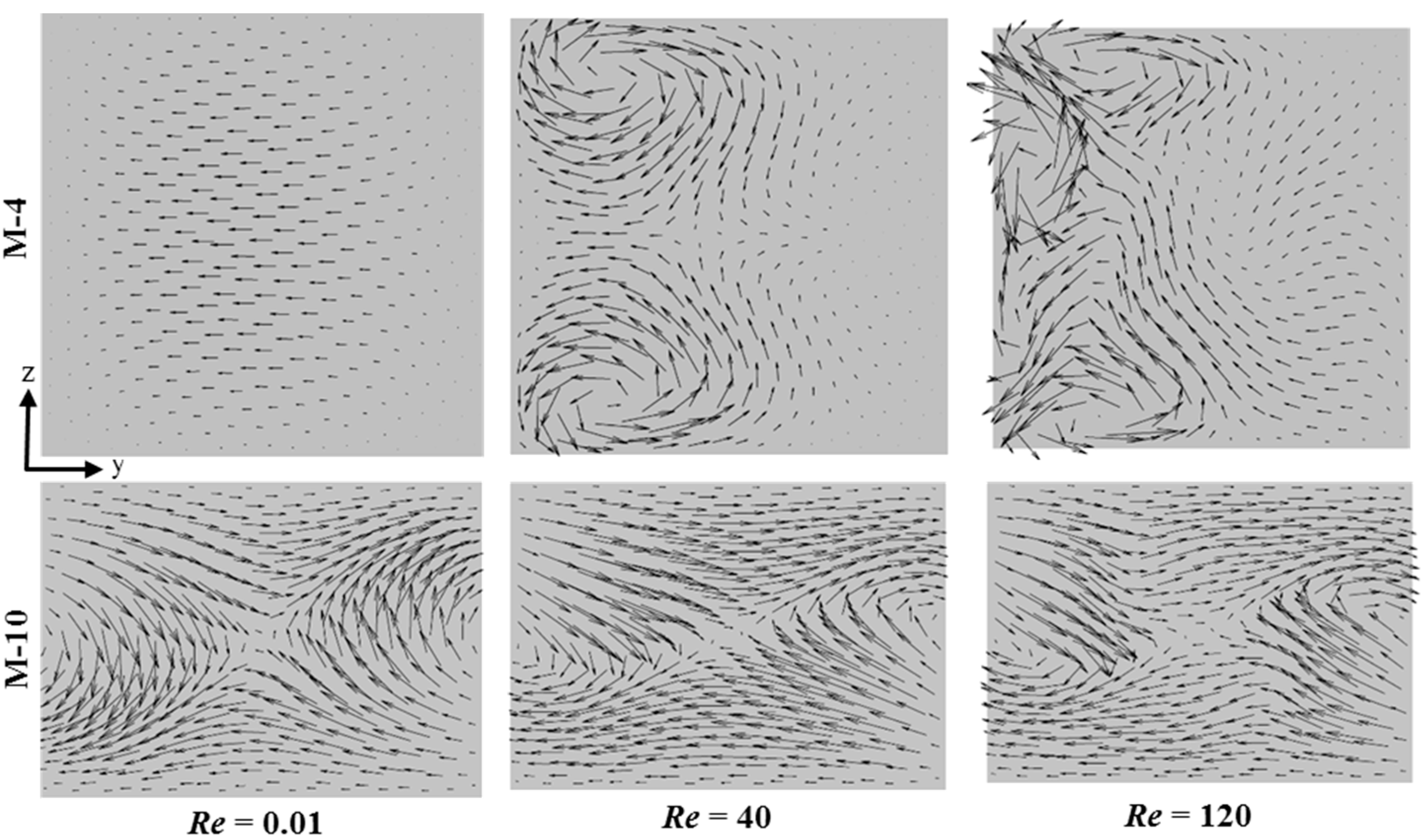
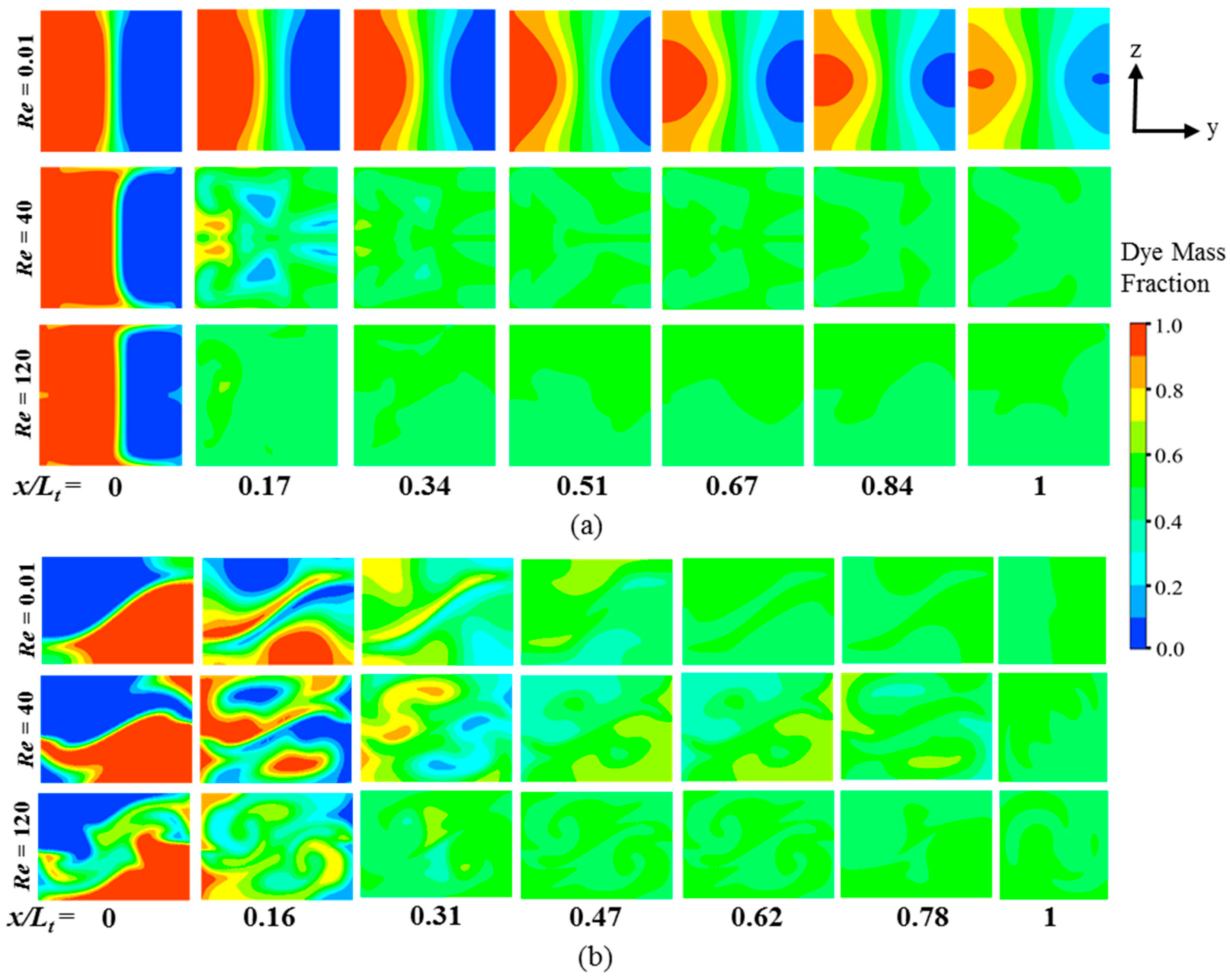
4.2.4. Comparison of Velocity and Concentration Fields between M-4 and M-10
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| c | mass fraction |
| D | diffusion coefficient (m2/s) |
| Li | length of initial part of main channel (µm) |
| Le | exit channel length (µm) |
| Lt | total length of the micromixer (µm) |
| M | mixing index |
| M0 | mixing index at the exit |
| N | number of sampling points |
| P | pressure drop (Pa) |
| Pi | pitch length (µm) |
| Re | Reynolds number |
| SAR U | split and recombine average inlet velocity (m/s) |
| W | width of main channel (µm) |
| x, y, z | Cartesian coordinates |
| Greek Symbols | |
| µ | fluid dynamic viscosity (kg·m−1·s−1) |
| ν | fluid Kinematic viscosity (m2/s) |
| ρ | fluid density (kg/m3) |
| σ | standard deviation |
| Subscripts | |
| i | sampling point or fluid component |
| m | optimal mixing |
| max | maximum value |
| x | axial distance |
References
- Park, T.; Lee, S.; Seong, G.H.; Choo, J.; Lee, E.K.; Kim, Y.S.; Ji, W.H.; Hwang, S.Y.; Gweon, D.G.; Lee, S. Highly sensitive signal detection of duplex dye-labelled DNA oligonucleotides in a PDMS microfluidic chip: Confocal surface-enhanced Raman spectroscopic study. Lab Chip 2005, 5, 437–442. [Google Scholar] [CrossRef]
- Rapp, B.E.; Gruhl, F.J.; Länge, K. Biosensors with label-free detection designed for diagnostic applications. Anal. Bioanal. Chem. 2010, 398, 2403–2412. [Google Scholar] [CrossRef]
- Rahman, M.; Rebrov, E. Microreactors for gold nanoparticles synthesis: From faraday to flow. Processes 2014, 2, 466–493. [Google Scholar] [CrossRef] [Green Version]
- Stone, H.A.; Stroock, A.D.; Ajdari, A. Engineering flows in small devices. Annu. Rev. Fluid Mech. 2004, 36, 381–411. [Google Scholar] [CrossRef] [Green Version]
- Squires, T.M.; Quake, S.R. Microfluidics: Fluid physics at the nanoliter scale. Rev. Mod. Phys. 2005, 77, 977–1026. [Google Scholar] [CrossRef] [Green Version]
- Hessel, V.; Löwe, H.; Schönfeld, F. Micromixers—A review on passive and active mixing principles. Chem. Eng. Sci. 2005, 60, 2479–2501. [Google Scholar] [CrossRef]
- Nguyen, N.T. Micromixers: Fundamentals, Design and Fabrication; William Andrew Publishers: New York, NY, USA, 2011. [Google Scholar]
- Ingham, C.J.; van Hylckama Vlieg, J.E.T. MEMS and the microbe. Lab Chip 2008, 8, 1604–1616. [Google Scholar] [CrossRef] [PubMed]
- Schulte, T.H.; Bardell, R.L.; Weigl, B.H. Microfluidic technologies in clinical diagnostics. Clin. Chim. Acta 2002, 321, 1–10. [Google Scholar] [CrossRef]
- Razzacki, S.Z.; Thwar, P.K.; Yang, M.; Ugaz, V.M.; Burns, M.A. Integrated microsystems for controlled drug delivery. Adv. Drug Deliv. Rev. 2004, 56, 185–198. [Google Scholar] [CrossRef] [PubMed]
- Yang, A.S.; Chuang, F.C.; Chen, C.K.; Lee, M.H.; Chen, S.W.; Su, T.L.; Yang, Y.C. A high-performance micromixer using three-dimensional Tesla structures for bio-applications. Chem. Eng. J. 2015, 263, 444–451. [Google Scholar] [CrossRef]
- Liu, R.H.; Lenigk, R.; Druyor-Sanchez, R.L.; Yang, J.; Grodzinski, P. Hybridization enhancement using cavitation microstreaming. Anal. Chem. 2003, 75, 1911–1917. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Wu, J.; Zhang, Y.; Lin, J.M. Qualitative and quantitative analysis of tumor cell metabolism via stable isotope labeling assisted microfluidic chip electrospray ionization mass spectrometry. Anal. Chem. 2012, 84, 1695–1701. [Google Scholar] [CrossRef] [PubMed]
- Westerhausen, C.; Schnitzler, L.G.; Wendel, D.; Krzysztoń, R.; Lächelt, U.; Wagner, E.; Rädler, J.O.; Wixforth, A. Controllable acoustic mixing of fluids in microchannels for the fabrication of therapeutic nanoparticles. Micromachines 2016, 7, 150. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, P.H.; Zhao, S.; Bachman, H.; Nama, N.; Li, Z.; Chen, C.; Yang, S.; Wu, M.; Zhang, S.P.; Huang, T.J. Acoustofluidic synthesis of particulate nanomaterials. Adv. Sci. 2019, 6, 1900913. [Google Scholar] [CrossRef] [Green Version]
- Culbertson, C.T.; Mickleburgh, T.G.; Stewart-James, S.A.; Sellens, K.A.; Pressnall, M. Micro total analysis systems: Fundamental advances and biological applications. Anal. Chem. 2014, 86, 95–118. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bouvier, E.S.P.; Koza, S.M. Advances in size-exclusion separations of proteins and polymers by UHPLC. TrAC Trends Anal. Chem. 2014, 63, 85–94. [Google Scholar] [CrossRef] [Green Version]
- Bachman, H.; Huang, P.H.; Zhao, S.; Yang, S.; Zhang, P.; Fu, H.; Huang, T.J. Acoustofluidic devices controlled by cell phones. Lab Chip 2018, 18, 433–441. [Google Scholar] [CrossRef]
- Nama, N.; Huang, P.H.; Huang, T.J.; Costanzo, F. Investigation of micromixing by acoustically oscillated sharp-edges. Biomicrofluidics 2016, 10, 024124. [Google Scholar] [CrossRef]
- Huang, P.H.; Chan, C.Y.; Li, P.; Nama, N.; Xie, Y.; Wei, C.H.; Chen, Y.; Ahmed, D.; Huang, T.J. A spatiotemporally controllable chemical gradient generator via acoustically oscillating sharp-edge structures. Lab Chip 2015, 15, 4166–4176. [Google Scholar] [CrossRef] [Green Version]
- Huang, P.H.; Chan, C.Y.; Li, P.; Wang, Y.; Nama, N.; Bachman, H.; Huang, T.J. A sharp-edge-based acoustofluidic chemical signal generator. Lab Chip 2018, 18, 1411–1421. [Google Scholar] [CrossRef]
- Harnett, C.K.; Templeton, J.; Dunphy-Guzman, K.A.; Senousy, Y.M.; Kanouff, M.P. Model based design of a microfluidic mixer driven by induced charge electroosmosis. Lab Chip 2008, 8, 565–572. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, D.; Mao, X.; Shi, J.; Juluri, B.K.; Huang, T.J. A millisecond micromixer via single-bubble-based acoustic streaming. Lab Chip 2009, 9, 2738. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Wu, Z. Micromixers—A review. J. Micromech. Microeng. 2005, 15, R1–R16. [Google Scholar] [CrossRef]
- Ebadi, M.; Moshksayan, K.; Kashaninejad, N.; Saidi, M.S.; Nguyen, N.T. A tool for designing tree-like concentration gradient generators for lab-on-a-chip applications. Chem. Eng. Sci. 2020, 212, 115339. [Google Scholar] [CrossRef]
- Rismanian, M.; Saidi, M.S.; Kashaninejad, N. A new non-dimensional parameter to obtain the minimum mixing length in tree-like concentration gradient generators. Chem. Eng. Sci. 2019, 195, 120–126. [Google Scholar] [CrossRef]
- Aref, H. Stirring by chaotic advection. J. Fluid Mech. 1984, 143, 1–21. [Google Scholar] [CrossRef]
- Ottino, J.M. The Kinematics of Mixing: Stretching, Chaos, and Transport; Cambridge Texts in Applied Mathematics; Cambridge University Press: Cambridge, Oxford, UK, 1989. [Google Scholar]
- Stroock, A.D.; Dertinger, S.K.W.; Ajdari, A.; Mezic, I.; Stone, H.A.; Whitesides, G.M. Chaotic mixer for microchannels. Science 2002, 295, 647–651. [Google Scholar] [CrossRef] [Green Version]
- Fu, L.M.; Fang, W.C.; Hou, H.H.; Wang, Y.N.; Hong, T.F. Rapid vortex microfluidic mixer utilizing double-heart chamber. Chem. Eng. J. 2014, 249, 246–251. [Google Scholar] [CrossRef]
- Swickrath, M.J.; Burns, S.D.; Wnek, G.E. Modulating passive micromixing in 2-D microfluidic devices via discontinuities in surface energy. Sens. Actuators B Chem. 2009, 140, 656–662. [Google Scholar] [CrossRef]
- Mengeaud, V.; Josserand, J.; Girault, H.H. Mixing processes in a zigzag microchannel: Finite element simulations and optical study. Anal. Chem. 2002, 74, 4279–4286. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, S.; Shao, T.; Jin, Y.; Cheng, Y. Visualization of micro-scale mixing in miscible liquids using? LIF technique and drug nano-particle preparation in T-shaped micro-channels. Chem. Eng. J. 2012, 192, 252–261. [Google Scholar] [CrossRef]
- Roudgar, M.; Brunazzi, E.; Galletti, C.; Mauri, R. Numerical study of split T-micromixers. Chem. Eng. Technol. 2012, 35, 1291–1299. [Google Scholar] [CrossRef]
- Hsieh, S.S.; Lin, J.W.; Chen, J.H. Mixing efficiency of Y-type micromixers with different angles. Int. J. Heat Fluid Flow 2013, 44, 130–139. [Google Scholar] [CrossRef]
- Hengzi, W.; Pio, I.; Erol, H.; Syed, M.; Wang, H.; Iovenitti, P.; Harvey, E.; Masood, S. Optimizing layout of obstacles for enhanced mixing in microchannels. Smart Mater. Struct. 2002, 11, 662. [Google Scholar]
- Ait Mouheb, N.; Malsch, D.; Montillet, A.; Solliec, C.; Henkel, T. Numerical and experimental investigations of mixing in T-shaped and cross-shaped micromixers. Chem. Eng. Sci. 2012, 68, 278–289. [Google Scholar] [CrossRef]
- Wang, L.; Liu, D.; Wang, X.; Han, X. Mixing enhancement of novel passive microfluidic mixers with cylindrical grooves. Chem. Eng. Sci. 2012, 81, 157–163. [Google Scholar] [CrossRef]
- Vanka, S.P.; Luo, G.; Winkler, C.M. Numerical study of scalar mixing in curved channels at low Reynolds numbers. AIChE J. 2004, 50, 2359–2368. [Google Scholar] [CrossRef]
- Hossain, S.; Ansari, M.A.; Kim, K.Y. Evaluation of the mixing performance of three passive micromixers. Chem. Eng. J. 2009, 150, 492–501. [Google Scholar] [CrossRef]
- Alam, A.; Kim, K.Y. Analysis of mixing in a curved microchannel with rectangular grooves. Chem. Eng. J. 2012, 181–182, 708–716. [Google Scholar] [CrossRef]
- Liu, R.H.; Stremler, M.A.; Sharp, K.V.; Olsen, M.G.; Santiago, J.G.; Adrian, R.J.; Aref, H.; Beebe, D.J. Passive mixing in a three-dimensional serpentine microchannel. J. Microelectromechan. Syst. 2000, 9, 190–197. [Google Scholar] [CrossRef]
- Beebe, D.J.; Adrian, R.J.; Olsen, M.G.; Stremler, M.A.; Aref, H.; Jo, B.H. Passive mixing in microchannels: Fabrication and flow experiments. Mecaniqe Ind. 2001, 2, 343–348. [Google Scholar] [CrossRef]
- Liu, Y.Z.; Kim, B.J.; Sung, H.J. Two-fluid mixing in a microchannel. Int. J. Heat Fluid Flow 2004, 25, 986–995. [Google Scholar] [CrossRef]
- Ansari, M.A.; Kim, K.Y. Parametric study on mixing of two fluids in a three-dimensional serpentine microchannel. Chem. Eng. J. 2009, 146, 439–448. [Google Scholar] [CrossRef]
- Lee, K.; Kim, C.; Shin, K.S.; Lee, J.W.; Ju, B.K.; Kim, T.S.; Lee, S.K.; Kang, J.Y. Fabrication of round channels using the surface tension of PDMS and its application to a 3D serpentine mixer. J. Micromech. Microeng. 2007, 17, 1533–1541. [Google Scholar] [CrossRef]
- Lin, Y. Numerical characterization of simple three-dimensional chaotic micromixers. Chem. Eng. J. 2015, 277, 303–311. [Google Scholar] [CrossRef]
- Lin, Y.; Yu, X.; Wang, Z.; Tu, S.T.; Wang, Z. Design and evaluation of an easily fabricated micromixer with three-dimensional periodic perturbation. Chem. Eng. J. 2011, 171, 291–300. [Google Scholar] [CrossRef]
- Park, J.M.; Kwon, T.H. Numerical characterization of three-dimensional serpentine micromixers. AIChE J. 2008, 54, 1999–2008. [Google Scholar] [CrossRef]
- Cortes-Quiroz, C.A.; Azarbadegan, A.; Zangeneh, M.; Goto, A. Analysis and multi-criteria design optimization of geometric characteristics of grooved micromixer. Chem. Eng. J. 2010, 160, 852–864. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Z.; Yim, C.; Lin, M.; Cao, X. Evaluation of floor-grooved micromixers using concentration-channel length profiles. Micromachines 2010, 1, 19–33. [Google Scholar] [CrossRef] [Green Version]
- Tóth, E.L.; Holczer, E.G.; Iván, K.; Fürjes, P. Optimized simulation and validation of particle advection in asymmetric staggered herringbone type micromixers. Micromachines 2015, 6, 136–150. [Google Scholar] [CrossRef] [Green Version]
- Sarkar, A.; Narváez, A.; Harting, J. Quantification of the performance of chaotic micromixers on the basis of finite time Lyapunov exponents. Microfluid. Nanofluidics 2012, 13, 19–27. [Google Scholar] [CrossRef] [Green Version]
- Hossain, S.; Husain, A.; Kim, K.Y. Shape optimization of a micromixer with staggered-herringbone grooves patterned on opposite walls. Chem. Eng. J. 2010, 162, 730–737. [Google Scholar] [CrossRef]
- Afzal, A.; Kim, K.Y. Three-objective optimization of a staggered herringbone micromixer. Sens. Actuators B Chem. 2014, 192, 350–360. [Google Scholar] [CrossRef]
- Lin, D.; He, F.; Liao, Y.; Lin, J.; Liu, C.; Song, J.; Cheng, Y. Three-dimensional staggered herringbone mixer fabricated by femtosecond laser direct writing. J. Opt. 2013, 15, 025601. [Google Scholar] [CrossRef]
- Ansari, M.A.; Kim, K.Y. Shape optimization of a micromixer with staggered herringbone groove. Chem. Eng. Sci. 2007, 62, 6687–6695. [Google Scholar] [CrossRef]
- Kim, D.S.; Lee, S.W.; Kwon, T.H.; Lee, S.S. A barrier embedded chaotic micromixer. J. Micromech. Microeng. 2004, 14, 798–805. [Google Scholar] [CrossRef]
- Hossain, S.; Kim, K.Y. Mixing analysis in a three-dimensional serpentine split-and-recombine micromixer. Chem. Eng. Res. Des. 2015, 100, 95–103. [Google Scholar] [CrossRef]
- Ohkawa, K.; Nakamoto, T.; Izuka, Y.; Hirata, Y.; Inoue, Y. Flow and mixing characteristics of? Type plate static mixer with splitting and inverse recombination. Chem. Eng. Res. Des. 2008, 86, 1447–1453. [Google Scholar] [CrossRef]
- Lee, S.W.; Lee, S.S. Rotation effect in split and recombination micromixing. Sens. Actuators B Chem. 2008, 129, 364–371. [Google Scholar] [CrossRef]
- Hardt, S.; Pennemann, H.; Schönfeld, F. Theoretical and experimental characterization of a low-Reynolds number split-and-recombine mixer. Microfluid. Nanofluidics 2006, 2, 237–248. [Google Scholar] [CrossRef]
- Lee, S.W.; Kim, D.S.; Lee, S.S.; Kwon, T.H. A split and recombination micromixer fabricated in a PDMS three-dimensional structure. J. Micromech. Microeng. 2006, 16, 1067–1072. [Google Scholar] [CrossRef]
- Viktorov, V.; Nimafar, M. A novel generation of 3D SAR-based passive micromixer: Efficient mixing and low pressure drop at a low Reynolds number. J. Micromech. Microeng. 2013, 23, 055023. [Google Scholar] [CrossRef]
- Nimafar, M.; Viktorov, V.; Martinelli, M. Experimental comparative mixing performance of passive micromixers with H-shaped sub-channels. Chem. Eng. Sci. 2012, 76, 37–44. [Google Scholar] [CrossRef]
- Nimafar, M.; Viktorov, V.; Martinelli, M. Experimental investigation of split and recombination micromixer in confront with basic T- and O- type micromixers. Int. J. Mech. Appl. 2012, 2, 61–69. [Google Scholar] [CrossRef]
- Carrier, O.; Funfschilling, D.; Debas, H.; Poncin, S.; Löb, P.; Li, H.Z. Pressure drop in a split-and-recombine caterpillar micromixer in case of newtonian and non-newtonian fluids. AIChE J. 2013, 59, 2679–2685. [Google Scholar] [CrossRef]
- Li, J.; Xia, G.; Li, Y. Numerical and experimental analyses of planar asymmetric split-and-recombine micromixer with dislocation sub-channels. J. Chem. Technol. Biotechnol. 2013, 88, 1757–1765. [Google Scholar] [CrossRef]
- Ansari, M.A.; Kim, K.Y. Mixing performance of unbalanced split and recombine micomixers with circular and rhombic sub-channels. Chem. Eng. J. 2010, 162, 760–767. [Google Scholar] [CrossRef]
- Xia, G.; Li, J.; Tian, X.; Zhou, M. Analysis of flow and mixing characteristics of planar asymmetric split-and-recombine (P-SAR) micromixers with fan-shaped cavities. Ind. Eng. Chem. Res. 2012, 51, 7816–7827. [Google Scholar] [CrossRef]
- Pennella, F.; Rossi, M.; Ripandelli, S.; Rasponi, M.; Mastrangelo, F.; Deriu, M.A.; Ridolfi, L.; Kähler, C.J.; Morbiducci, U. Numerical and experimental characterization of a novel modular passive micromixer. Biomed. Microdevices 2012, 14, 849–862. [Google Scholar] [CrossRef] [Green Version]
- Hong, C.C.; Choi, J.W.; Ahn, C.H. A novel in-plane passive microfluidic mixer with modified Tesla structures. Lab Chip 2004, 4, 109–113. [Google Scholar] [CrossRef]
- Chung, C.K.; Chang, C.K.; Lai, C.C. Simulation and fabrication of a branch-channel rhombic micromixer for low pressure drop and short mixing length. Microsyst. Technol. 2014, 20, 1981–1986. [Google Scholar] [CrossRef]
- Xia, G.D.; Li, Y.F.; Wang, J.; Zhai, Y.L. Numerical and experimental analyses of planar micromixer with gaps and baffles based on field synergy principle. Int. Commun. Heat Mass Transf. 2016, 71, 188–196. [Google Scholar] [CrossRef]
- Hossain, S.; Kim, K.Y. Mixing analysis of passive micromixer with unbalanced three-split rhombic sub-channels. Micromachines 2014, 5, 913–928. [Google Scholar] [CrossRef]
- Ansari, M.A.; Kim, K.Y.; Anwar, K.; Kim, S.M. A novel passive micromixer based on unbalanced splits and collisions of fluid streams. J. Micromech. Microeng. 2010, 20, 055007. [Google Scholar] [CrossRef] [Green Version]
- Hossain, S.; Ansari, M.A.; Husain, A.; Kim, K.Y. Analysis and optimization of a micromixer with a modified Tesla structure. Chem. Eng. J. 2010, 158, 305–314. [Google Scholar] [CrossRef]
- Sheu, T.S.; Chen, S.J.; Chen, J.J. Mixing of a split and recombine micromixer with tapered curved microchannels. Chem. Eng. Sci. 2012, 71, 321–332. [Google Scholar] [CrossRef]
- Afzal, A.; Kim, K.Y. Passive split and recombination micromixer with convergent-divergent walls. Chem. Eng. J. 2012, 203, 182–192. [Google Scholar] [CrossRef]
- Kim, D.S.; Lee, S.H.; Kwon, T.H.; Ahn, C.H. A serpentine laminating micromixer combining splitting/recombination and advection. Lab Chip 2005, 5, 739–747. [Google Scholar] [CrossRef] [Green Version]
- Park, J.M.; Kim, D.S.; Kang, T.G.; Kwon, T.H. Improved serpentine laminating micromixer with enhanced local advection. Microfluid. Nanofluidics 2008, 4, 513–523. [Google Scholar] [CrossRef]
- Feng, X.; Ren, Y.; Jiang, H. An effective splitting-and-recombination micromixer with self-rotated contact surface for wide Reynolds number range applications. Biomicrofluidics 2013, 7, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Lim, T.W.; Son, Y.; Jeong, Y.J.; Yang, D.Y.; Kong, H.J.; Lee, K.S.; Kim, D.P. Three-dimensionally crossing manifold micro-mixer for fast mixing in a short channel length. Lab Chip 2011, 11, 100–103. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xia, H.M.; Wan, S.Y.M.; Shu, C.; Chew, Y.T. Chaotic micromixers using two-layer crossing channels to exhibit fast mixing at low Reynolds numbers. Lab Chip 2005, 5, 748–755. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Chen, Q.D.; Tsai, C.T. Three dimensional triangle chaotic micromixer. Adv. Mater. Res. 2014, 875–877, 1189–1193. [Google Scholar] [CrossRef]
- Fang, W.F.; Yang, J.T. A novel microreactor with 3D rotating flow to boost fluid reaction and mixing of viscous fluids. Sens. Actuators B Chem. 2009, 140, 629–642. [Google Scholar] [CrossRef]
- Hossain, S.; Lee, I.; Kim, S.M.; Kim, K.Y. A micromixer with two-layer serpentine crossing channels having excellent mixing performance at low Reynolds numbers. Chem. Eng. J. 2017, 327, 268–277. [Google Scholar] [CrossRef]
- Raza, W.; Hossain, S.; Kim, K.Y. Effective mixing in a short serpentine split-and-recombination micromixer. Sens. Actuators B Chem. 2018, 258, 381–392. [Google Scholar] [CrossRef]
- Hossain, S.; Kim, K.Y. Parametric investigation on mixing in a micromixer with two-layer crossing channels. Springerplus 2016, 5, 794. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.Y.; Fu, L.M. Recent advances and applications of micromixers. Sens. Actuators B Chem. 2018, 259, 677–702. [Google Scholar] [CrossRef]
- Cai, G.; Xue, L.; Zhang, H.; Lin, J. A review on micromixers. Micromachines 2017, 8, 274. [Google Scholar] [CrossRef]
- Jeong, G.S.; Chung, S.; Kim, C.B.; Lee, S.H. Applications of micromixing technology. Analyst 2010, 135, 460–473. [Google Scholar] [CrossRef]
- Capretto, L.; Cheng, W.; Hill, M.; Zhang, X. Micromixing within microfluidic devices. Top. Curr. Chem. 2011, 304, 27–68. [Google Scholar] [PubMed]
- Lee, C.Y.; Wang, W.T.; Liu, C.C.; Fu, L.M. Passive mixers in microfluidic systems: A review. Chem. Eng. J. 2016, 288, 146–160. [Google Scholar] [CrossRef]
- Pennella, F.; Mastrangelo, F.; Gallo, D.; Massai, D.; Deriu, M.A.; Labate, G.F.D.; Bignardi, C.; Montevecchi, F.; Morbiducci, U. A Survey of microchannel geometries for mixing of species in biomicrofluidics. Single Two Phase Flows Chem. Biomed. Eng. 2012, 548–578. [Google Scholar]
- Falk, L.; Commenge, J.M. Performance comparison of micromixers. Chem. Eng. Sci. 2010, 65, 405–411. [Google Scholar] [CrossRef]
- Viktorov, V.; Mahmud, M.; Visconte, C. Comparative analysis of passive micromixers at a wide range of reynolds numbers. Micromachines 2015, 6, 1166–1179. [Google Scholar] [CrossRef] [Green Version]
- Bošković, D.; Loebbecke, S.; Gross, G.A.; Koehler, J.M. Residence time distribution studies in microfluidic mixing structures. Chem. Eng. Technol. 2011, 34, 361–370. [Google Scholar] [CrossRef]
- ANSYS. Solver Theory Guide, CFX-15.0; ANSYS Inc.: Canonsburg, PA, USA, 2013. [Google Scholar]
- Chung, C.K.; Shih, T.R. A rhombic micromixer with asymmetrical flow for enhancing mixing. J. Micromech. Microeng. 2007, 17, 2495–2504. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Micromixer Design | Mixing Mechanism | Selected Micromixer |
|---|---|---|---|
| 1 | 2D designs using serpentine, spiral, curved helical channels [30,31,32,33,34,35,36,37,38,39,40,41] | Inertial force (secondary flow, Dean vortex) | M-1 [40], M-2 [41] |
| 2 | 2D designs with SAR structures [68,69,70,71,72,73,74,75,76,77,78,79] | Inertial force, SAR | M-3 [68], M-4 [77] |
| 3 | 3D design with serpentine and/or SAR structures [42,43,44,45,46,47,48,49,59,60,61,62,63,64,65,66,67,80,81] | Inertial force, chaotic mixing, multi-lamination | M-5 [45], M-6 [59], M-7 [81] |
| 4 | 3D design with patterned grooves [29,50,51,52,53,54,55,56,57,58] | Inertial force, chaotic mixing | M-8 [58] |
| 5 | 3D designs with SAR two-layer crossing channels [82,83,84,85,86,87,88,89] | Chaotic mixing, multi-lamination | M-9 [84], M-10 [87] |
| Micromixer Designation | Micromixer | Geometry (Type in Table 1) | Designers [Ref.] | Year |
|---|---|---|---|---|
| M-1 | Curved micromixer | 2D serpentine (1) | Hossain et al. [40] | 2009 |
| M-2 | Curved micromixer with grooves | 2D serpentine (1) | Alam and Kim [41] | 2012 |
| M-3 | Modified P-SAR (planar SAR) micromixer with dislocation sub-channels | 2D SAR (2) | Li et al. [68] | 2013 |
| M-4 | Modified Tesla micromixer | 2D SAR (2) | Hossain et al. [77] | 2010 |
| M-5 | 3D serpentine micromixer | 3D serpentine (3) | Ansari and Kim [45] | 2009 |
| M-6 | 3D serpentine SAR micromixer | 3D serpentine SAR (3) | Hossain and Kim [59] | 2015 |
| M-7 | Improved serpentine laminating micromixer | 3D serpentine SAR (3) | Park et al. [81] | 2008 |
| M-8 | Barrier embedded chaotic micromixer | 3D grooves (4) | Kim et al. [58] | 2004 |
| M-9 | Chaotic micromixer with two-layer crossing microchannels | 3D SAR (5) | Xia et al. [84] | 2005 |
| M-10 | Chaotic micromixer with two-layer serpentine crossing microchannels | 3D serpentine SAR (5) | Hossain et al. [87] | 2017 |
| Micromixer | Optimum Number of Meshes | Number of Finer Meshes | % Deviation of Mixing Index between the Optimum and Finest Meshes | Micromixer | Optimum Number of Meshes | Number of Finer Meshes | % Deviation of Mixing Index between the Optimum and Finest Meshes |
|---|---|---|---|---|---|---|---|
| M-1 | 1.81 × 106 | 2.04 × 106 | 1.39 | M-6 | 2.07 × 106 | 2.34 × 106 | 0.10 |
| M-2 | 2.07 × 106 | 2.41 × 106 | 1.16 | M-7 | 2.19 × 106 | 2.55 × 106 | 0.54 |
| M-3 | 1.55 × 106 | 2.08 × 106 | 0.94 | M-8 | 2.21 × 106 | 2.53 × 106 | 1.05 |
| M-4 | 2.16 × 106 | 2.33 × 106 | 0.20 | M-9 | 1.90 × 106 | 2.03 × 106 | 0.10 |
| M-5 | 1.79 × 106 | 1.96 × 106 | 0.10 | M-10 | 1.61 × 106 | 1.80 × 106 | 0.11 |
| Micromixer | Mixing Index at the Exit | |||||||
|---|---|---|---|---|---|---|---|---|
| Low-Re Range | Intermediate-Re Range | High-Re Range | ||||||
| Re = 0.01 | Re = 0.1 | Re = 1 | Re = 20 | Re = 40 | Re = 60 | Re = 80 | Re = 120 | |
| M-1 | 0.560 | 0.250 | 0.224 | 0.572 | 0.793 | 0.979 | 0.990 | 0.998 |
| M-2 | 0.554 | 0.244 | 0.221 | 0.694 | 0.858 | 0.974 | 0.997 | 0.997 |
| M-3 | 0.268 | 0.141 | 0.125 | 0.241 | 0.422 | 0.657 | 0.828 | 0.890 |
| M-4 | 0.465 | 0.255 | 0.203 | 0.883 | 0.999 | 0.999 | 0.999 | 0.999 |
| M-5 | 0.546 | 0.361 | 0.377 | 0.999 | 0.999 | 0.999 | 0.999 | 0.999 |
| M-6 | 0.649 | 0.506 | 0.472 | 0.999 | 0.999 | 0.999 | 0.999 | 0.999 |
| M-7 | 0.904 | 0.594 | 0.537 | 0.567 | 0.733 | 0.856 | 0.909 | 0.963 |
| M-8 | 0.310 | 0.238 | 0.226 | 0.250 | 0.284 | 0.310 | 0.337 | 0.401 |
| M-9 | 0.939 | 0.909 | 0.905 | 0.934 | 0.972 | 0.987 | 0.998 | 0.996 |
| M-10 | 0.970 | 0.926 | 0.915 | 0.901 | 0.929 | 0.995 | 0.973 | 0.996 |
| Micromixer | Pressure Drop (Pa) | |||||||
|---|---|---|---|---|---|---|---|---|
| Low-Re Range | Intermediate-Re Range | High-Re Range | ||||||
| Re = 0.01 | Re = 0.1 | Re = 1 | Re = 20 | Re = 40 | Re = 60 | Re = 80 | Re = 120 | |
| M-1 | 2.95 × 100 | 2.95 × 101 | 2.95 × 102 | 6.77 × 103 | 1.63 × 104 | 2.81 × 104 | 4.18 × 104 | 7.70 × 104 |
| M-2 | 2.87 × 100 | 2.87 × 101 | 2.87 × 102 | 6.64 × 103 | 1.62 × 104 | 2.80 × 104 | 4.15 × 104 | 7.68 × 104 |
| M-3 | 3.58 × 10−1 | 3.72 × 100 | 3.73 × 101 | 8.30 × 102 | 1.95 × 103 | 3.39 × 103 | 5.14 × 103 | 9.72 × 103 |
| M-4 | 1.03 × 100 | 1.03 × 101 | 1.04 × 102 | 3.53 × 103 | 1.20 × 104 | 2.58 × 104 | 4.50 × 104 | 9.70 × 104 |
| M-5 | 7.94 × 10−1 | 7.94 × 100 | 7.96 × 101 | 2.44 × 103 | 7.12 × 103 | 1.39 × 104 | 2.19 × 104 | 4.32 × 104 |
| M-6 | 1.67 × 101 | 1.67 × 102 | 1.68 × 103 | 5.32 × 104 | 1.57 × 105 | 3.10 × 105 | 5.15 × 105 | 1.09 × 106 |
| M-7 | 2.46 × 100 | 2.46 × 101 | 2.47 × 102 | 5.27 × 103 | 1.16 × 104 | 1.95 × 104 | 2.90 × 104 | 5.49 × 104 |
| M-8 | 2.09 × 100 | 2.12 × 101 | 2.12 × 102 | 4.29 × 103 | 8.73 × 103 | 1.33 × 104 | 1.79 × 104 | 2.75 × 104 |
| M-9 | 1.78 × 10−1 | 1.78 × 100 | 1.78 × 101 | 4.42 × 102 | 1.16 × 103 | 2.21 × 103 | 3.59 × 103 | 7.37 × 103 |
| M-10 | 1.63 × 10−1 | 1.63 × 100 | 1.63 × 101 | 3.90 × 102 | 9.94 × 102 | 1.84 × 103 | 2.93 × 103 | 5.90 × 103 |
| Micromixer | Mixing Cost, MC (Pa−1) | |||||||
|---|---|---|---|---|---|---|---|---|
| Low-Re Range | Intermediate-Re Range | High-Re Range | ||||||
| Re = 0.01 | Re = 0.1 | Re = 1 | Re = 20 | Re = 40 | Re = 60 | Re = 80 | Re = 120 | |
| M-1 | 1.90 × 10−1 | 8.47 × 10−3 | 7.58 × 10−4 | 8.45 × 10−5 | 4.85 × 10−5 | 3.48× 10−5 | 2.39 × 10−5 | 1.30 × 10−5 |
| M-2 | 1.93 × 10−1 | 8.48 × 10−3 | 7.67 × 10−4 | 1.05 × 10−4 | 5.29 × 10−5 | 3.47× 10−5 | 2.40 × 10−5 | 1.30 × 10−5 |
| M-3 | 7.51 × 10−1 | 3.79 × 10−2 | 3.36 × 10−3 | 2.90 × 10−4 | 2.16 × 10−4 | 1.94× 10−4 | 1.61 × 10−4 | 9.15 × 10−5 |
| M-4 | 4.50 × 10−1 | 2.47 × 10−2 | 1.96 × 10−3 | 2.50 × 10−4 | 8.36 × 10−5 | 3.87× 10−5 | 2.22 × 10−5 | 1.03 × 10−5 |
| M-5 | 6.88 × 10−1 | 4.55 × 10−2 | 4.74 × 10−3 | 4.09 × 10−4 | 1.40 × 10−4 | 7.18× 10−5 | 4.57 × 10−5 | 2.32 × 10−5 |
| M-6 | 3.89 × 10−2 | 3.03 × 10−3 | 2.82 × 10−4 | 1.88 × 10−5 | 6.38 × 10−6 | 3.22× 10−6 | 1.94 × 10−6 | 9.20 × 10−7 |
| M-7 | 3.67 × 10−1 | 2.41 × 10−2 | 2.18 × 10−3 | 1.07 × 10−4 | 6.29 × 10−5 | 4.40× 10−5 | 3.13 × 10−5 | 1.76 × 10−5 |
| M-8 | 1.48 × 10−1 | 1.12 × 10−2 | 1.07 × 10−3 | 5.81 × 10−5 | 3.25 × 10−5 | 2.34× 10−5 | 1.88 × 10−5 | 1.46 × 10−5 |
| M-9 | 5.28 × 100 | 5.11 × 10−1 | 5.08 × 10−2 | 2.12 × 10−3 | 8.38 × 10−4 | 4.47× 10−4 | 2.78 × 10−4 | 1.35 × 10−4 |
| M-10 | 5.95 × 100 | 5.68 × 10−1 | 5.60 × 10−2 | 2.31 × 10−3 | 9.34 × 10−4 | 5.41× 10−4 | 3.32 × 10−4 | 1.69 × 10−4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raza, W.; Hossain, S.; Kim, K.-Y. A Review of Passive Micromixers with a Comparative Analysis. Micromachines 2020, 11, 455. https://doi.org/10.3390/mi11050455
Raza W, Hossain S, Kim K-Y. A Review of Passive Micromixers with a Comparative Analysis. Micromachines. 2020; 11(5):455. https://doi.org/10.3390/mi11050455
Chicago/Turabian StyleRaza, Wasim, Shakhawat Hossain, and Kwang-Yong Kim. 2020. "A Review of Passive Micromixers with a Comparative Analysis" Micromachines 11, no. 5: 455. https://doi.org/10.3390/mi11050455