Ergonomic Mechanical Design and Assessment of a Waist Assist Exoskeleton for Reducing Lumbar Loads During Lifting Task


Abstract
:1. Introduction
2. Biomechanical Analysis
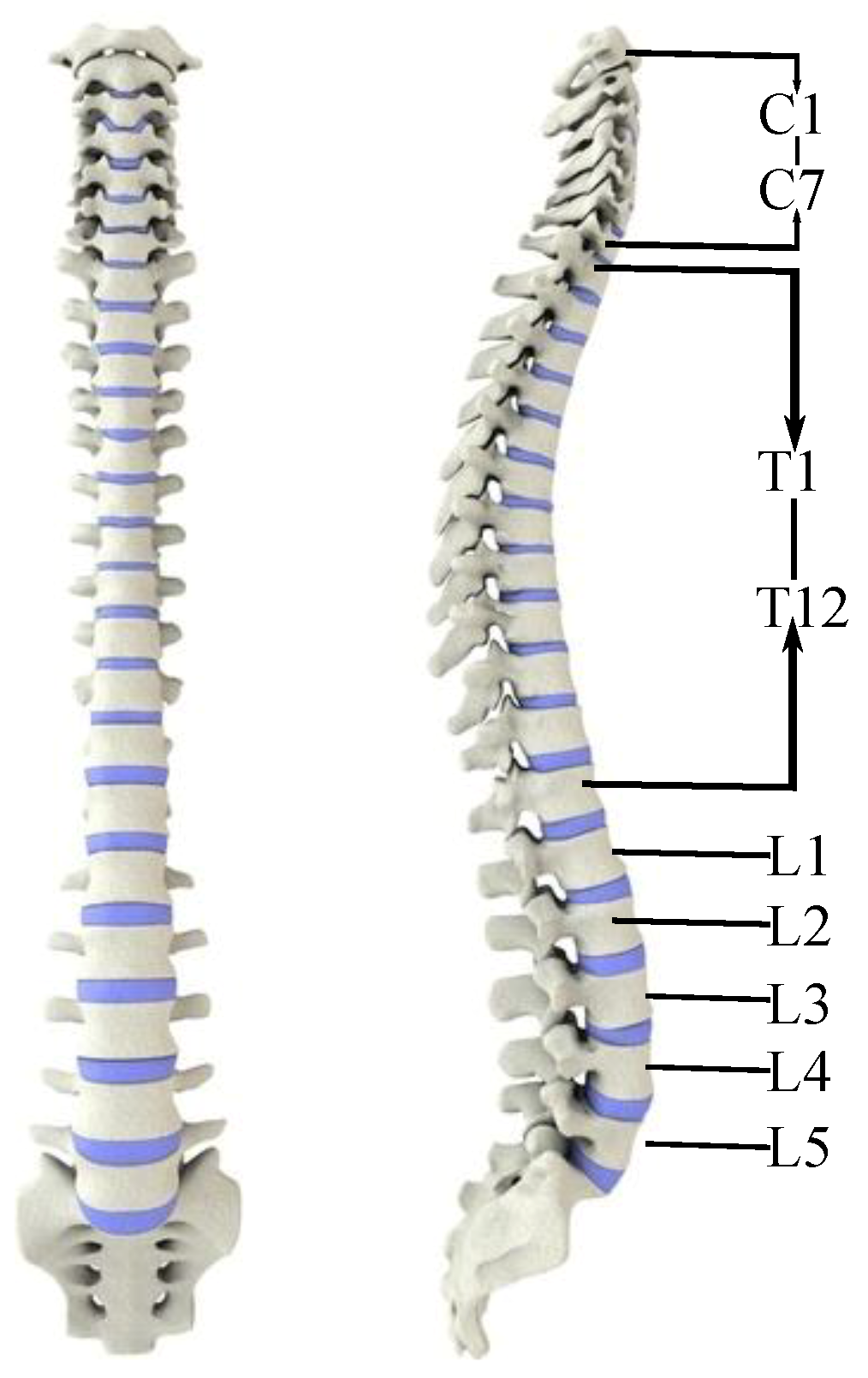
2.1. Lumbar Structure
2.2. Lumbar Load
3. Exoskeleton System Design
3.1. Design Theory Analysis
3.2. Overall Mechanical Structure
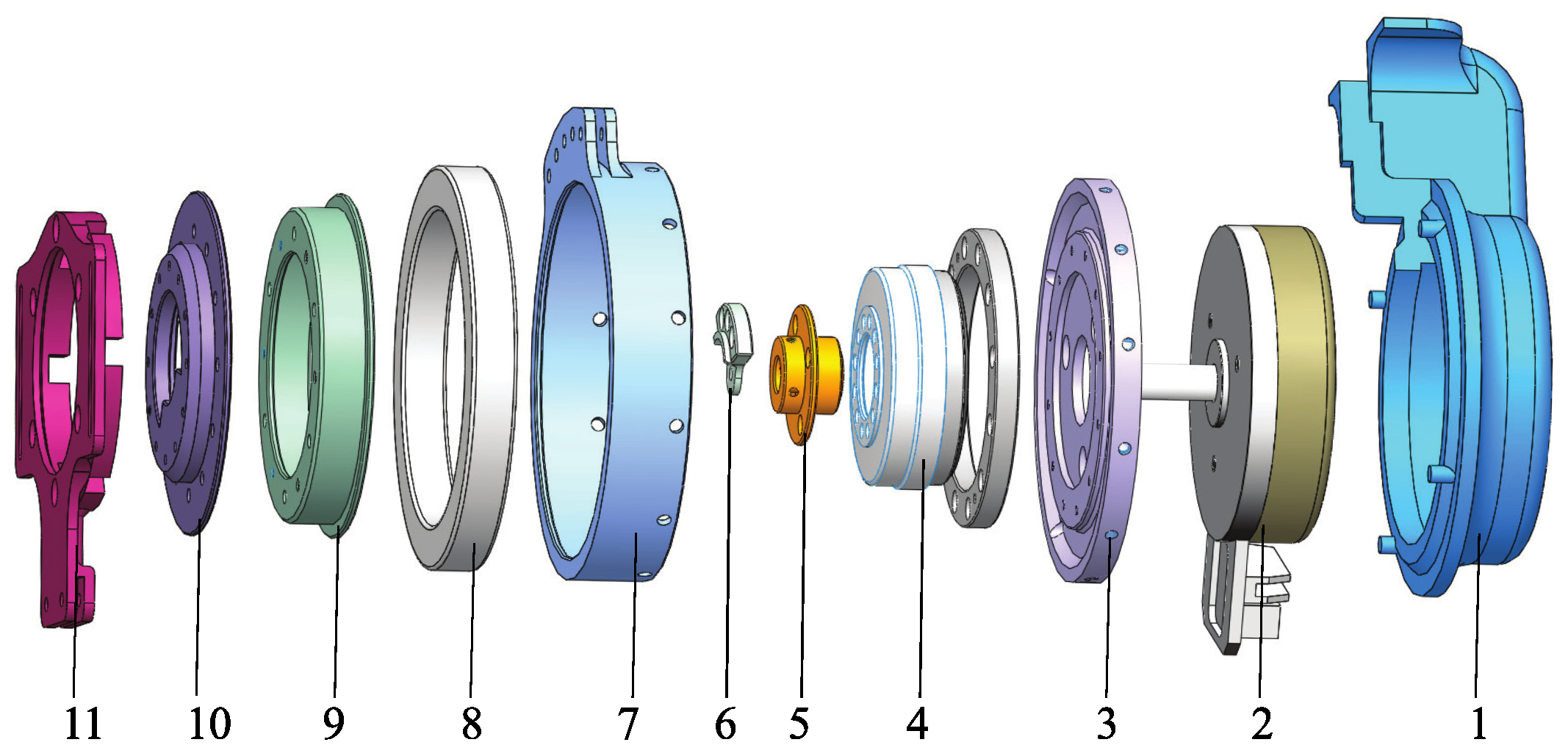
3.3. Hip Joint Module
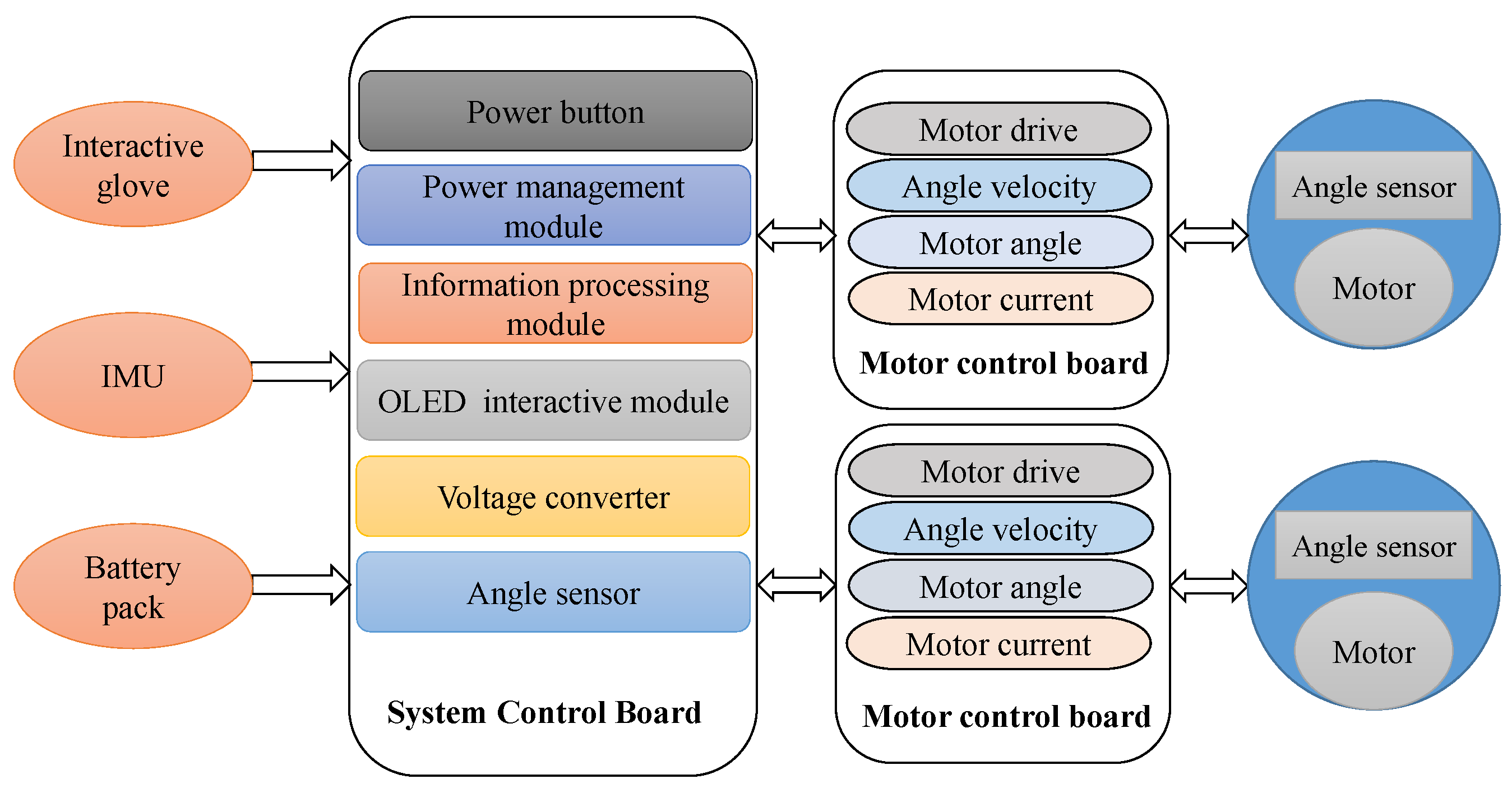
3.4. Embedded Electronics
3.5. Dynamical Model Analysis
3.6. Control Strategy
4. Experiment
4.1. Participants
4.2. Testing Equipment and Surface Electromyography
4.3. Testing Procedures
5. Results
6. Conclusions and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bernard, B.P.; Putz-Anderson, V. Musculoskeletal Disorders and Workplace Factors: A Critical Review of Epidemiologic Evidence for Work-related Musculoskeletal Disorders of the Neck, Upper Extremity, and Low Back; National Institute for Occupational Safety and Health: Cincinnati, OH, USA, 1997.
- Prins, R.; Jensen, P.; Lord, T.; Delang, E.; Lezcano, M.; Kuhn, K.; Polanen, V.; Bjurstrom, K.; Haeckel, M.; Castriotta, M.; et al. Inventory of Socio-Economic Information about Work-Related Musculoskeletal Disorders in the Member States of the European Union; European Agency for Safety and Health at Work Europe: Bilbao, Spain, 2000.
- Shang, X.; Wu, X. The care regime in China: Elder and child care. J. Comp. Soc. Welf. 2011, 27, 123–131. [Google Scholar] [CrossRef]
- Abdoli-e, M.; Agnew, M.J.; Stevenson, J.M. An on-body personal lift augmentation device (PLAD) reduces EMG amplitude of erector spinae during lifting tasks. Clin. Biomech. 2006, 21, 456–465. [Google Scholar] [CrossRef] [PubMed]
- Frost, D.M.; Abdoli-E, M.; Stevenson, J.M. PLAD (personal lift assistive device) stiffness affects the lumbar flexion/extension moment and the posterior chain EMG during symmetrical lifting tasks. J. Electromyogr. Kinesiol. 2009, 19, e403–e412. [Google Scholar] [CrossRef] [PubMed]
- Wehner, M. Lower Extremity Exoskeleton as Lift Assist Device; University of California: Berkeley, CA, USA, 2009. [Google Scholar]
- Ulrey, B.L.; Fathallah, F.A. Subject-specific, whole-body models of the stooped posture with a personal weight transfer device. J. Electromyogr. Kinesiol. 2013, 23, 206–215. [Google Scholar] [CrossRef] [PubMed]
- Ulrey, B.L.; Fathallah, F.A. Effect of a personal weight transfer device on muscle activities and joint flexions in the stooped posture. J. Electromyogr. Kinesiol. 2013, 23, 195–205. [Google Scholar] [CrossRef] [PubMed]
- Yong, X.; Wang, C.; Wang, C.; Feng, W.; Wu, X.; Wang, Y. Development of a low-power wearable powered waist exoskeleton with mechanical clutch. In Proceedings of the 2017 IEEE International Conference on Information and Automation (ICIA), Macau, China, 18–20 July 2017; pp. 177–182. [Google Scholar]
- Wesslén, J. Exoskeleton Exploration: Research, Development, and Applicability of Industrial Exoskeletons in the Automotive Industry; School of Engineering in Jönköping: Jönköping, Sweden, 2018. [Google Scholar]
- Hara, H.; Sankai, Y. Development of HAL for lumbar support. In SCIS & ISIS SCIS & ISIS 2010; Japan Society for Fuzzy Theory and Intelligent Informatics: Tokyo, Japan, 2010; pp. 416–421. [Google Scholar]
- Luo, Z.; Yu, Y. Wearable stooping-assist device in reducing risk of low back disorders during stooped work. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; pp. 230–236. [Google Scholar]
- Sasaki, D.; Noritsugu, T.; Takaiwa, M. Development of pneumatic lower limb power assist wear driven with wearable air supply system. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4440–4445. [Google Scholar]
- Sasaki, D.; Takaiwa, M. Development of pneumatic power assist wear to reduce physical burden. In Proceedings of the 2014 IEEE/SICE International Symposium on System Integration, Tokyo, Japan, 13–14 December 2014; pp. 626–631. [Google Scholar]
- Muramatsu, Y.; Kobayashi, H.; Sato, Y.; Jiaou, H.; Hashimoto, T.; Kobayashi, H. Quantitative performance analysis of exoskeleton augmenting devices–muscle suit–for manual worker. Int. J. Autom. Technol. 2011, 5, 559–567. [Google Scholar] [CrossRef]
- Huysamen, K.; de Looze, M.; Bosch, T.; Ortiz, J.; Toxiri, S.; O’Sullivan, L.W. Assessment of an active industrial exoskeleton to aid dynamic lifting and lowering manual handling tasks. Appl. Ergon. 2018, 68, 125–131. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Huang, H.H. A lower-back robotic exoskeleton: Industrial handling augmentation used to provide spinal support. IEEE Robot. Autom. Mag. 2018, 25, 95–106. [Google Scholar] [CrossRef]
- De Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’Sullivan, L.W. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef] [PubMed]
- Hara, H.; Sankai, Y. HAL equipped with passive mechanism. In Proceedings of the 2012 IEEE/SICE International Symposium on System Integration (SII), Fukuoka, Japan, 16–18 December 2012; pp. 1–6. [Google Scholar]
- Toxiri, S.; Ortiz, J.; Masood, J.; Fernández, J.; Mateos, L.A.; Caldwell, D.G. A wearable device for reducing spinal loads during lifting tasks: Biomechanics and design concepts. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 2295–2300. [Google Scholar]
- Toxiri, S.; Ortiz, J.; Caldwell, D.G. Assistive strategies for a back support exoskeleton: Experimental evaluation. In Proceedings of the International Conference on Robotics in Alpe-Adria Danube Region, Turin, Italy, 21–23 June 2017; pp. 805–812. [Google Scholar]
- Abdoli-e, M.; Stevenson, J.M. The effect of on-body lift assistive device on the lumbar 3D dynamic moments and EMG during asymmetric freestyle lifting. Clin. Biomech. 2008, 23, 372–380. [Google Scholar] [CrossRef] [PubMed]
- Anam, K.; Al-Jumaily, A.A. Active exoskeleton control systems: State of the art. Procedia Eng. 2012, 41, 988–994. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Wolbrecht, E.T.; Chan, V.; Reinkensmeyer, D.J.; Bobrow, J.E. Optimizing compliant, model-based robotic assistance to promote neurorehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 286–297. [Google Scholar] [CrossRef] [PubMed]
- Almenara, M.; Cempini, M.; Gómez, C.; Cortese, M.; Martín, C.; Medina, J.; Vitiello, N.; Opisso, E. Usability test of a hand exoskeleton for activities of daily living: an example of user-centered design. Disabil. Rehabil. Assist. Technol. 2017, 12, 84–96. [Google Scholar] [CrossRef] [PubMed]
- Naruse, K.; Kawai, S.; Yokoi, H.; Kakazu, Y. Development of wearable exoskeleton power assist system for lower back support. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No. 03CH37453), LasVegas, NV, USA, 27–31 October 2003; Volume 4, pp. 3630–3635. [Google Scholar]
- Lamers, E.P.; Yang, A.J.; Zelik, K.E. Feasibility of a biomechanically-assistive garment to reduce low back loading during leaning and lifting. IEEE Trans. Biomed. Eng. 2018, 65, 1674–1680. [Google Scholar] [PubMed]
- Lee, Y.; Kim, Y.J.; Lee, J.; Lee, M.; Choi, B.; Kim, J.; Park, Y.J.; Choi, J. Biomechanical design of a novel flexible exoskeleton for lower extremities. IEEE/ASME Trans. Mechatron. 2017, 22, 2058–2069. [Google Scholar] [CrossRef]
- Chen, B.; Lanotte, F.; Grazi, L.; Vitiello, N.; Crea, S. Classification of Lifting Techniques for Application of A Robotic Hip Exoskeleton. Sensors 2019, 19, 963. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exoskeleton | Tasks | Power Supply | Weight (kg) | Battery Life (h) | Loading (kg) |
|---|---|---|---|---|---|
| ATOUN Model A | B, L | Servo motor | 6.7 | 2.5 | 25 |
| ATOUN Model AS | B, L, C | Servo motor | 6.7 | 2.5 | 25 |
| ATOUN Model Y | B, L, C | Servo motor | 4.5 | 8 | 25 |
| HAL Lumbar | B, L | Hydraulic actuators | 3 | - | 7.5 |
| Muscle Suit | L, H | Artificial muscle | 5.5 | Gas supply | 35 |
| Buddy | B, L | Servo motor | 6.8 | 3 | 13 |
| SIAT waist EXO | B, L | Servo motor | 5 | 4 | 25 |
| 0 kg | 5 kg | 10 kg | 15 kg | 20 kg | 25 kg | |
|---|---|---|---|---|---|---|
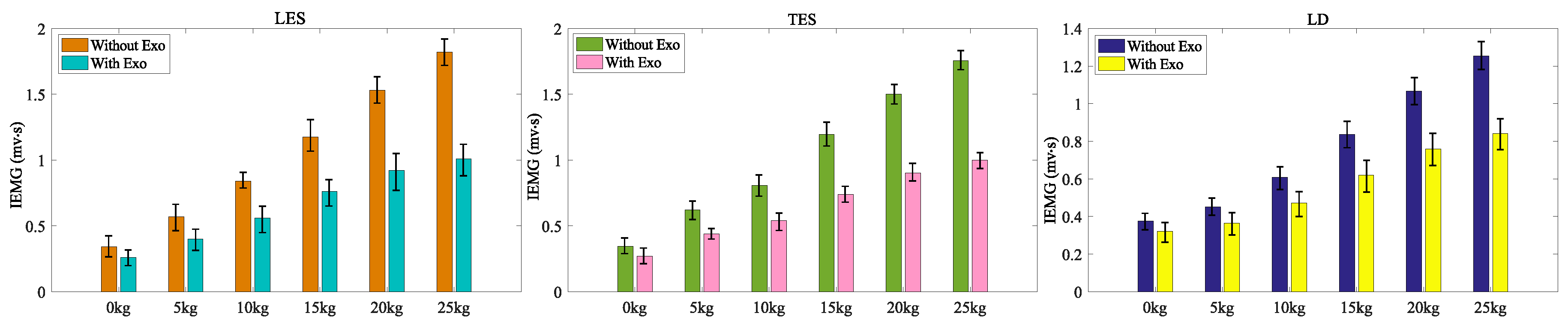
| LES | ||||||
| Without Exo | 0.34 ± 0.01 | 0.56 ± 0.02 | 0.84 ± 0.03 | 1.17 ± 0.05 | 1.52 ± 0.06 | 1.82 ± 0.06 |
| With EXo | 0.26 ± 0.01 | 0.40 ± 0.01 | 0.562 ± 0.02 | 0.76 ± 0.03 | 0.922 ± 0.03 | 1.01 ± 0.03 |
| Efficiency | 23.5 ± 5.5 | 28.6 ± 7.1 | 33.3 ± 6.9 | 35 ± 7.6 | 39.3 ± 7.2 | 44.5 ± 6.5 |
| TES | ||||||
| Without Exo | 0.34 ± 0.01 | 0.62 ± 0.02 | 0.81 ± 0.03 | 1.19 ± 0.04 | 1.5 ± 0.05 | 1.75 ± 0.06 |
| With EXo | 0.27 ± 0.01 | 0.44 ± 0.01 | 0.54 ± 0.02 | 0.74 ± 0.02 | 0.9 ± 0.02 | 1 ± 0.03 |
| Efficiency | 20.5 ± 4.5 | 29.0 ± 6.3 | 33.3 ± 6.6 | 37.8 ± 6.5 | 40 ± 5.8 | 42.8 ± 6.6 |
| LD | ||||||
| Without Exo | 0.37 ± 0.01 | 0.45 ± 0.01 | 0.61 ± 0.01 | 0.84 ± 0.03 | 1.07 ± 0.03 | 1.25 ± 0.03 |
| With EXo | 0.32 ± 0.01 | 0.36 ± 0.01 | 0.47 ± 0.01 | 0.62 ± 0.02 | 0.76 ± 0.02 | 0.84 ± 0.02 |
| Efficiency | 13.5 ± 2.8 | 20.0 ± 3.2 | 22.9 ± 4 | 26.2 ± 5.7 | 29 ± 6 | 32.8 ± 5.8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yong, X.; Yan, Z.; Wang, C.; Wang, C.; Li, N.; Wu, X. Ergonomic Mechanical Design and Assessment of a Waist Assist Exoskeleton for Reducing Lumbar Loads During Lifting Task. Micromachines 2019, 10, 463. https://doi.org/10.3390/mi10070463
Yong X, Yan Z, Wang C, Wang C, Li N, Wu X. Ergonomic Mechanical Design and Assessment of a Waist Assist Exoskeleton for Reducing Lumbar Loads During Lifting Task. Micromachines. 2019; 10(7):463. https://doi.org/10.3390/mi10070463
Chicago/Turabian StyleYong, Xu, Zefeng Yan, Can Wang, Chao Wang, Nan Li, and Xinyu Wu. 2019. "Ergonomic Mechanical Design and Assessment of a Waist Assist Exoskeleton for Reducing Lumbar Loads During Lifting Task" Micromachines 10, no. 7: 463. https://doi.org/10.3390/mi10070463