The Effect of Displacement Constraints on the Failure of MEMS Tuning Fork Gyroscopes under Shock Impact


Abstract
:1. Introduction
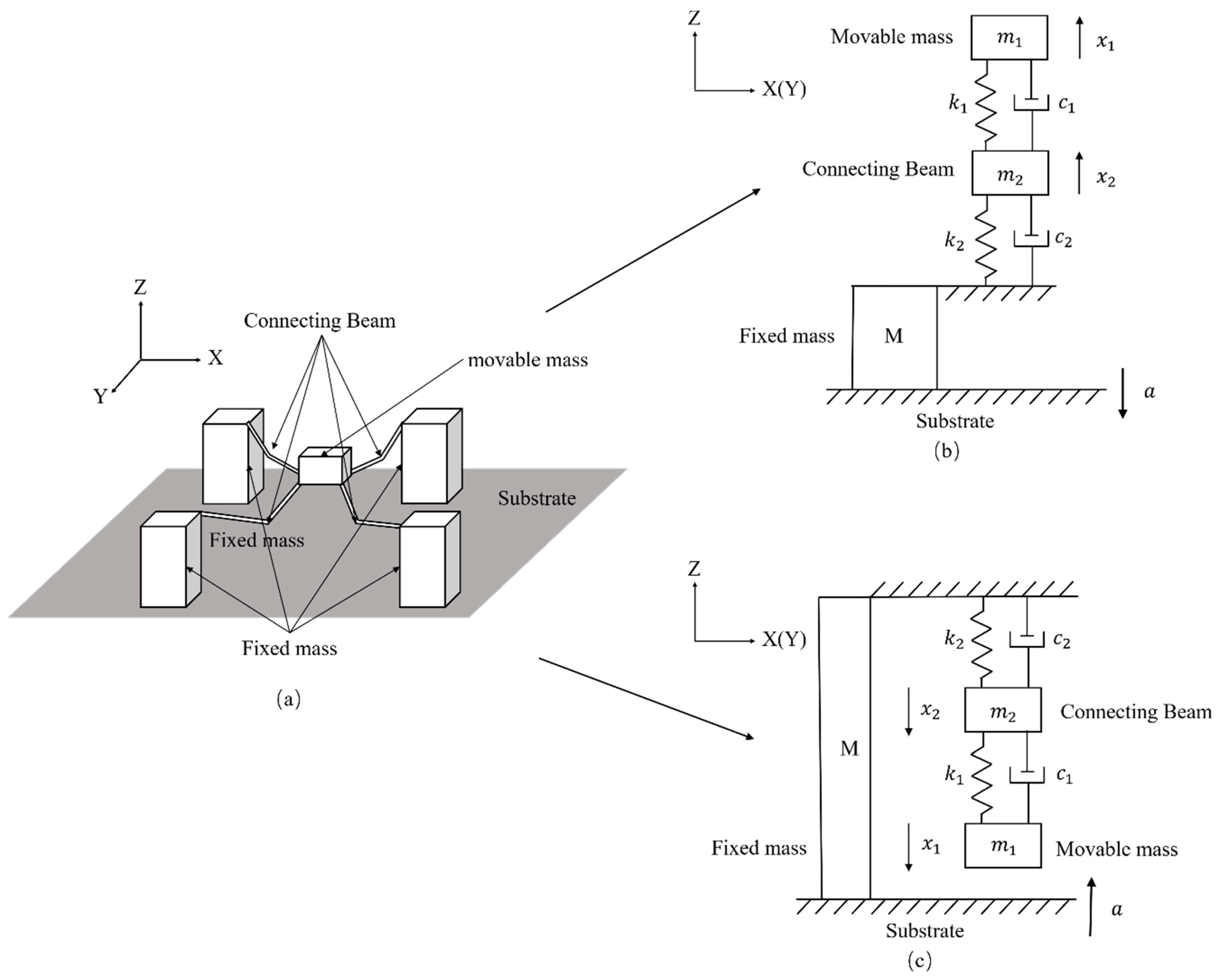
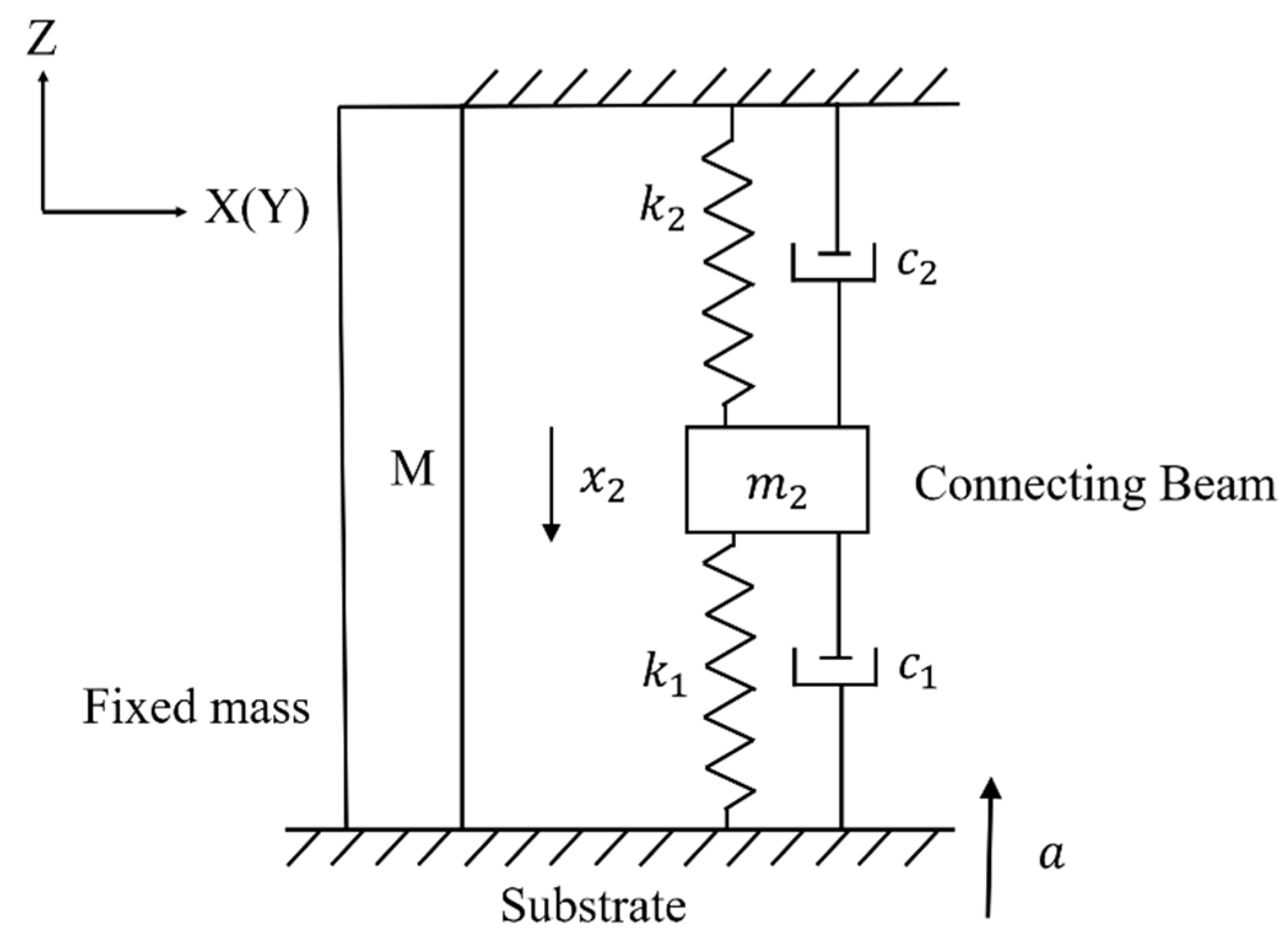
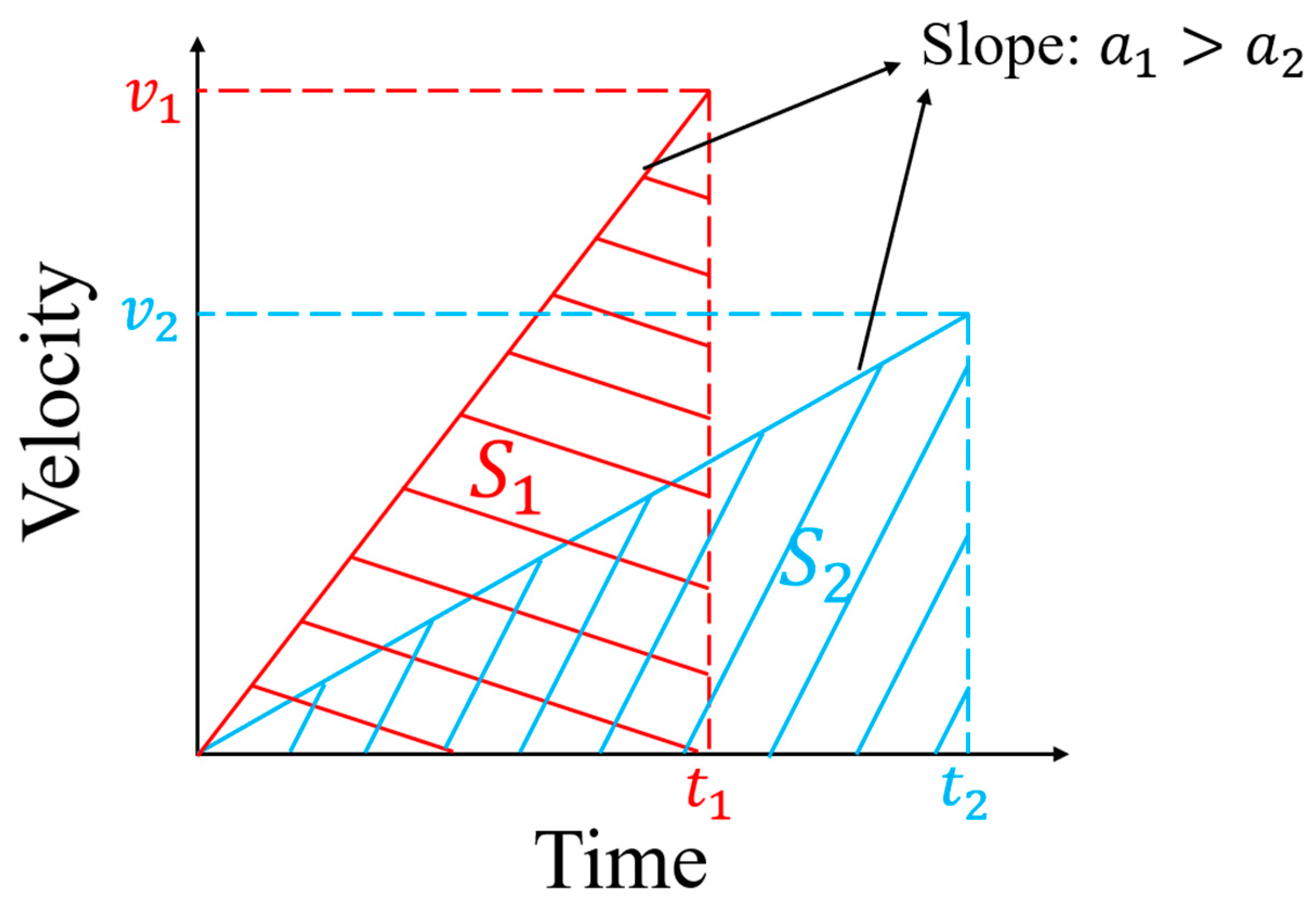
2. Theory and Equations
3. Simulation and Analysis
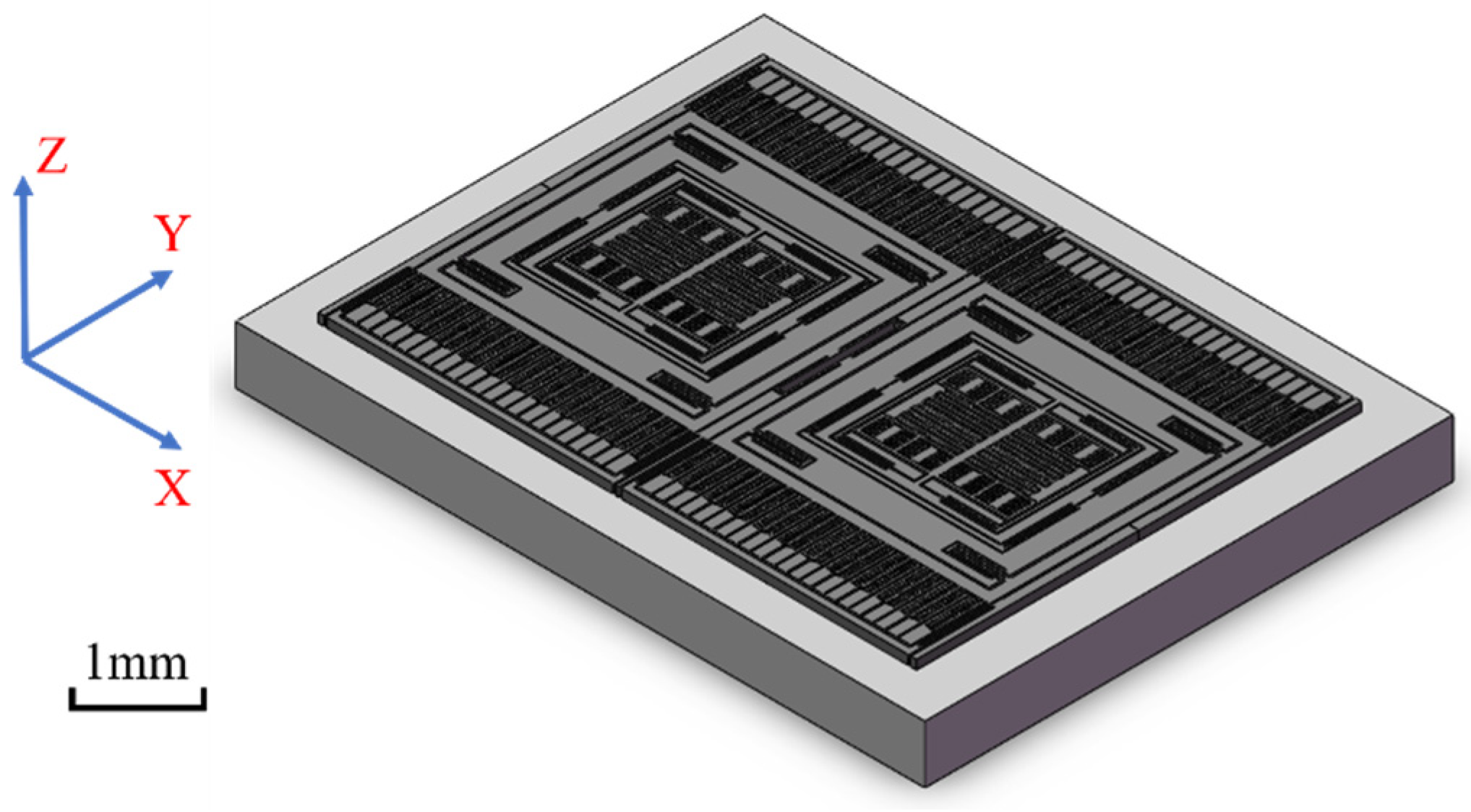
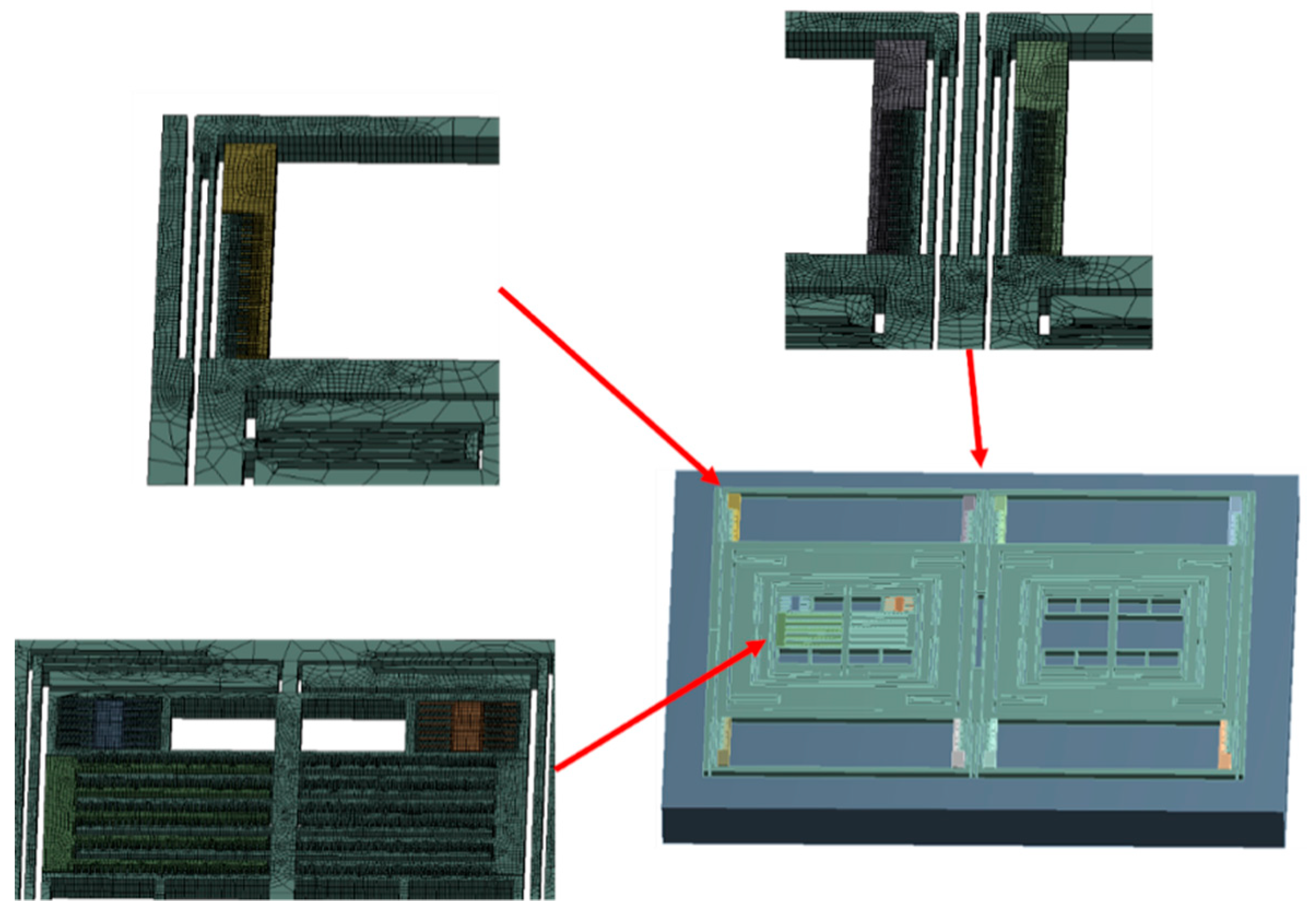
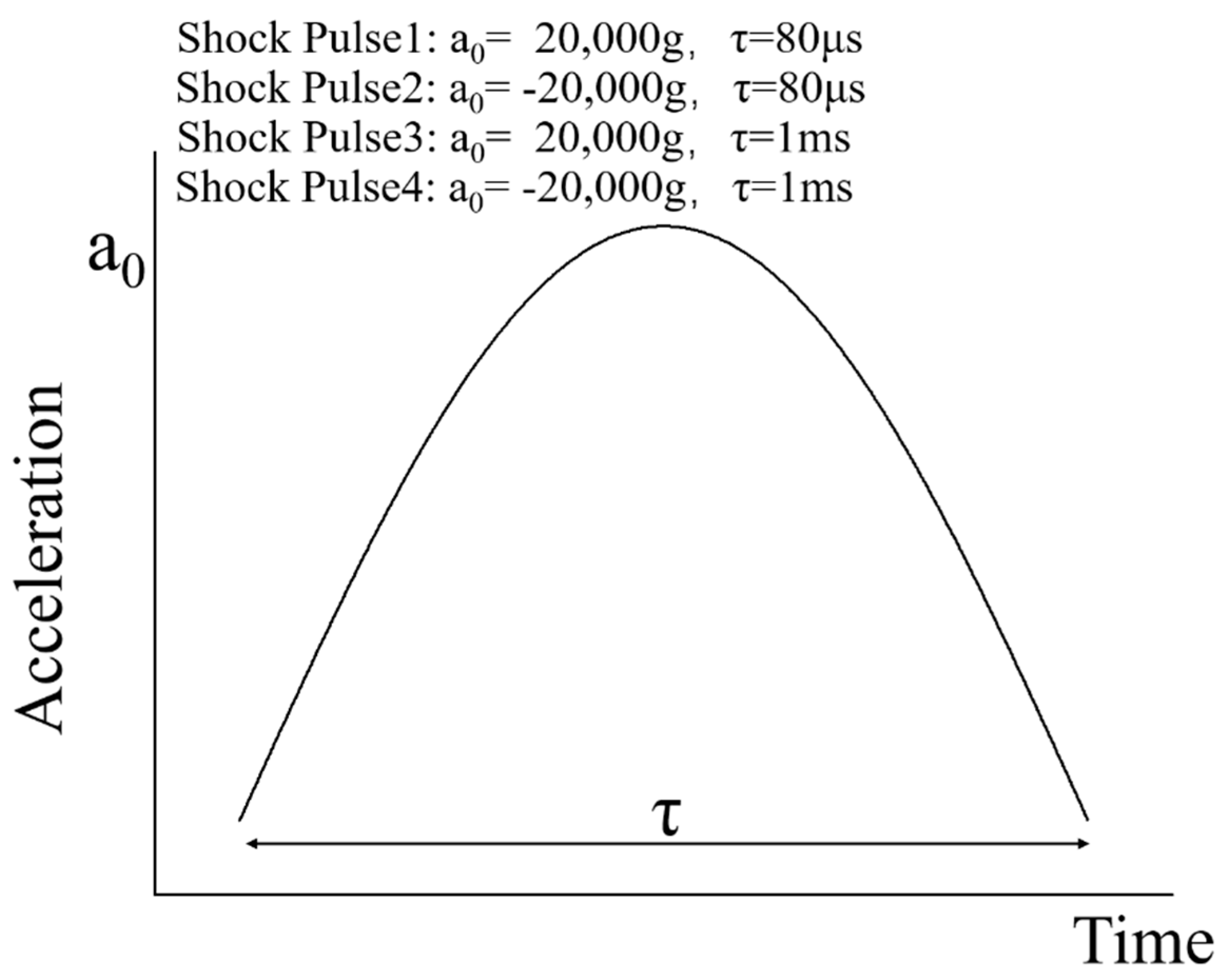
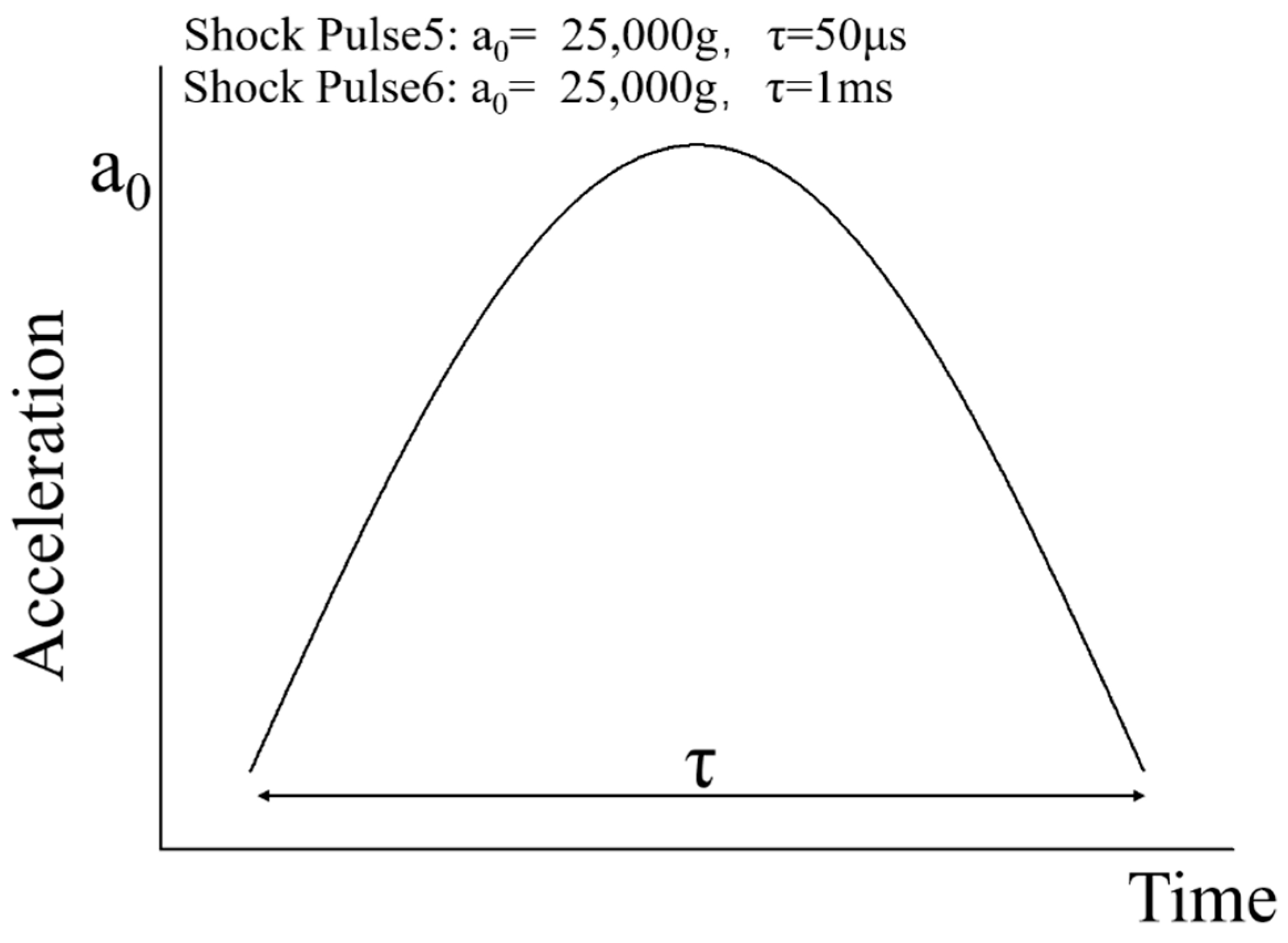
3.1. FEA Model and Setting
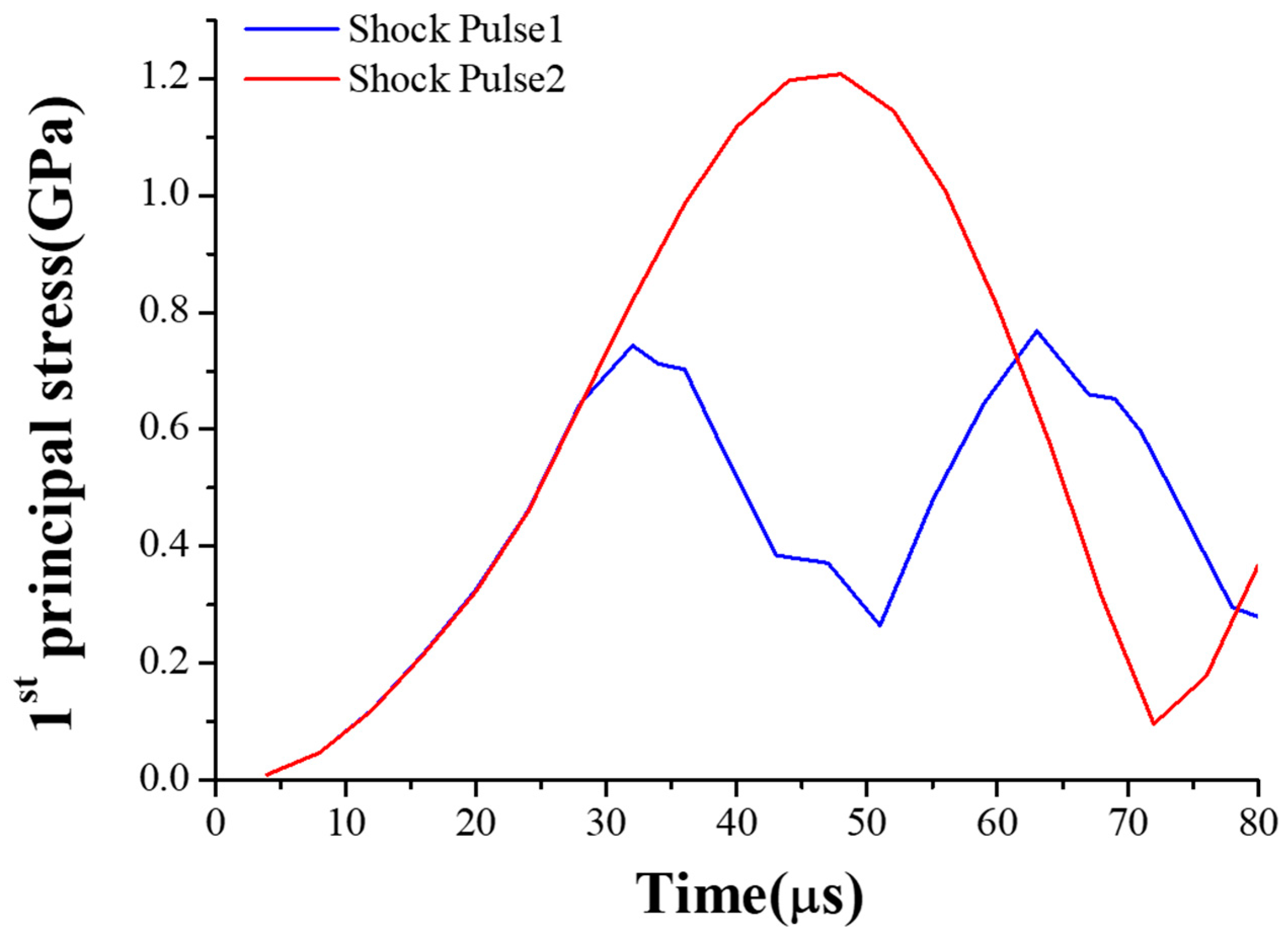
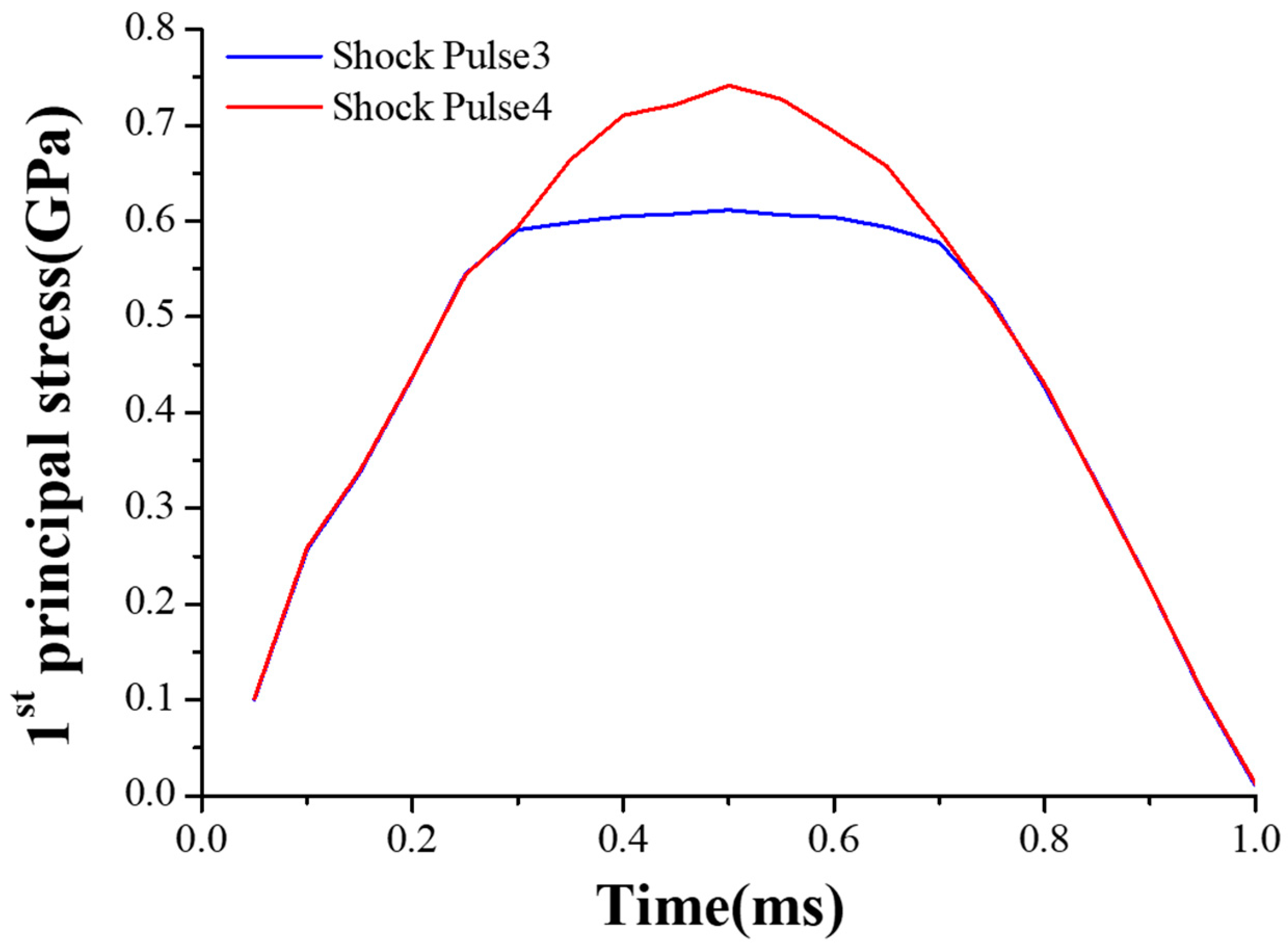
3.2. FEA Results and Discussion
3.2.1. Failure Analysis of MEMS Tuning Fork Gyroscope under Z-Axis Shock Impact
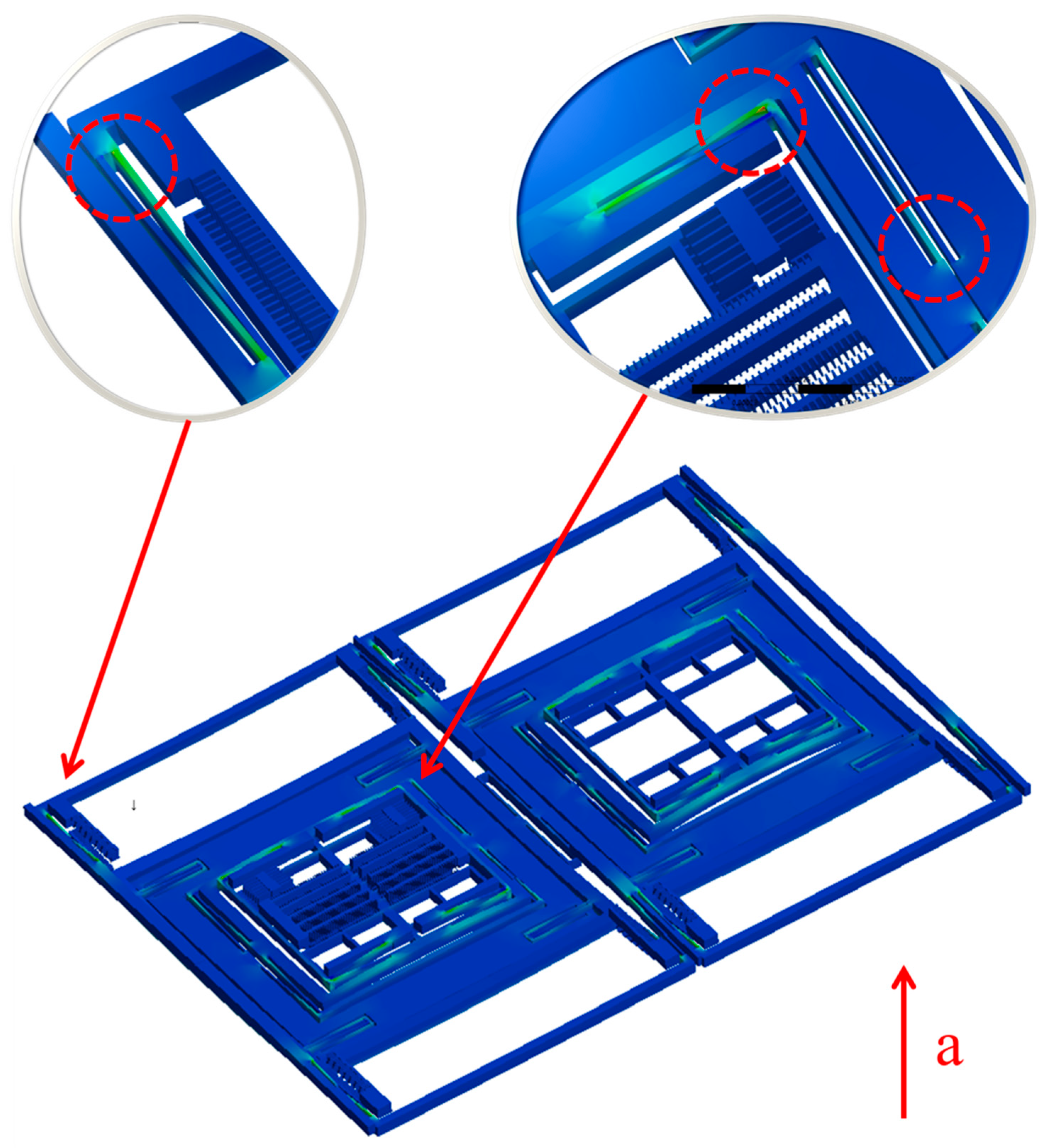
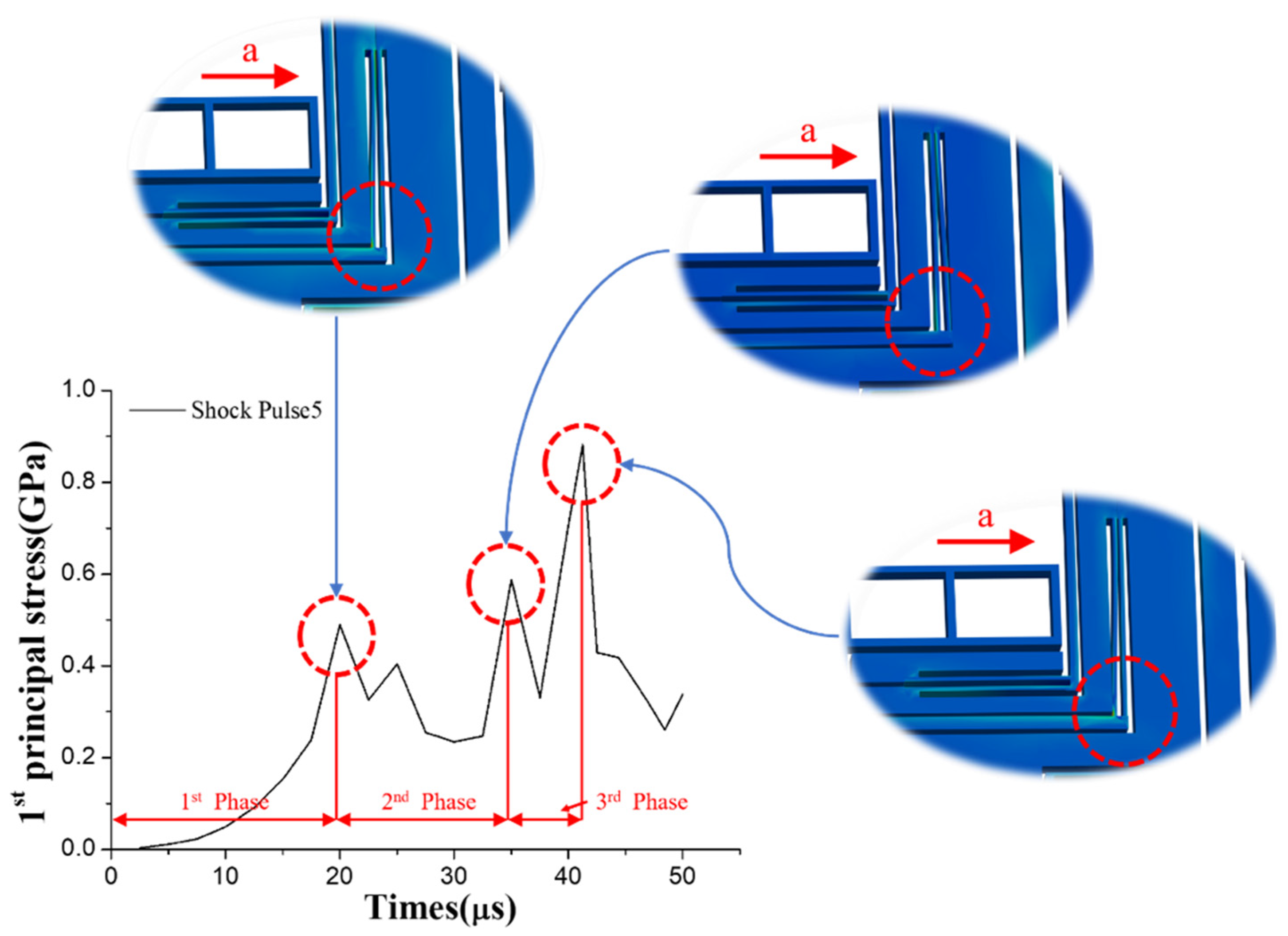
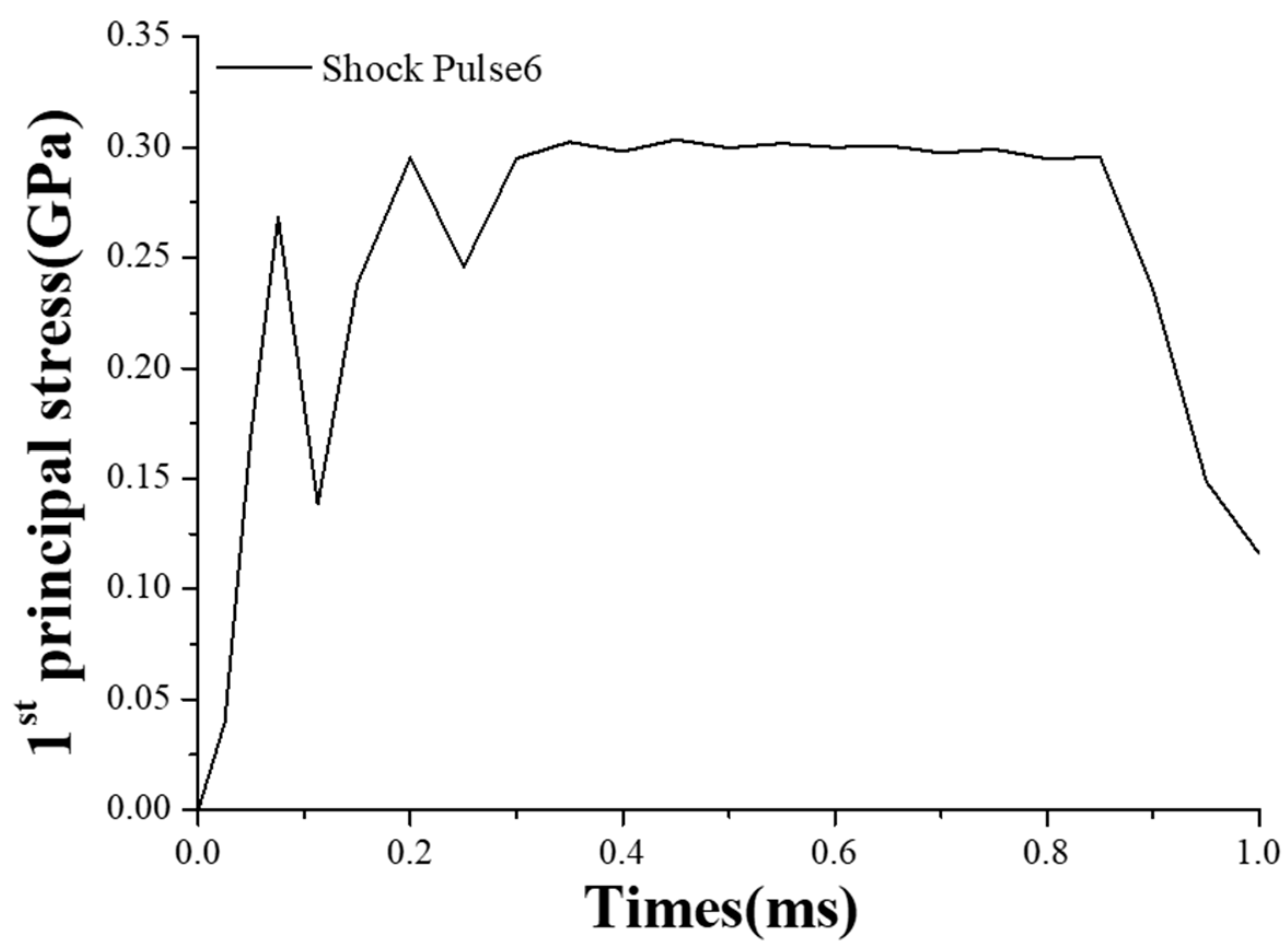
3.2.2. Failure Analysis of MEMS Tuning Fork Gyroscope under X-Axis/Y-Axis Shock Impact
4. Shock Test
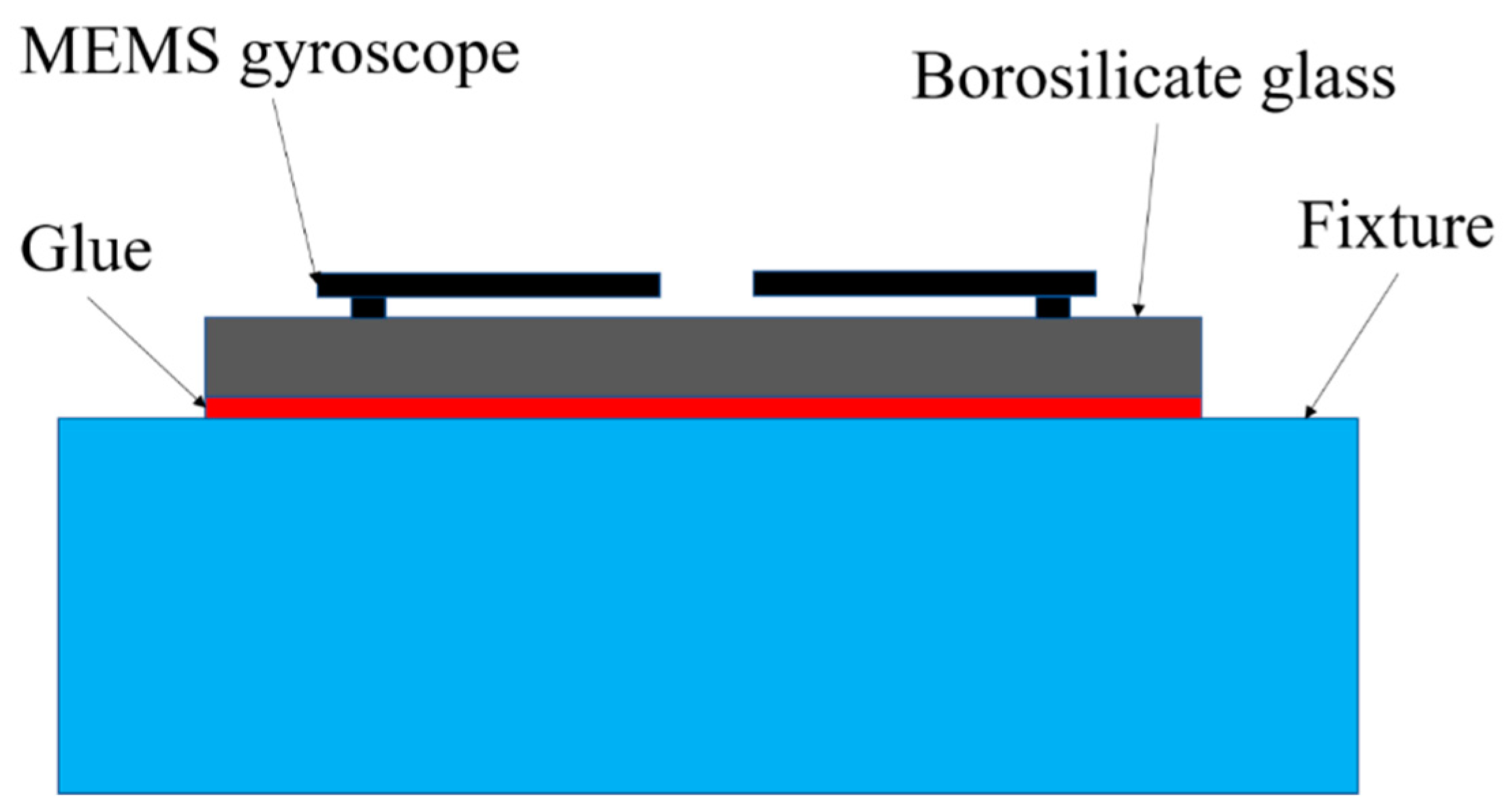
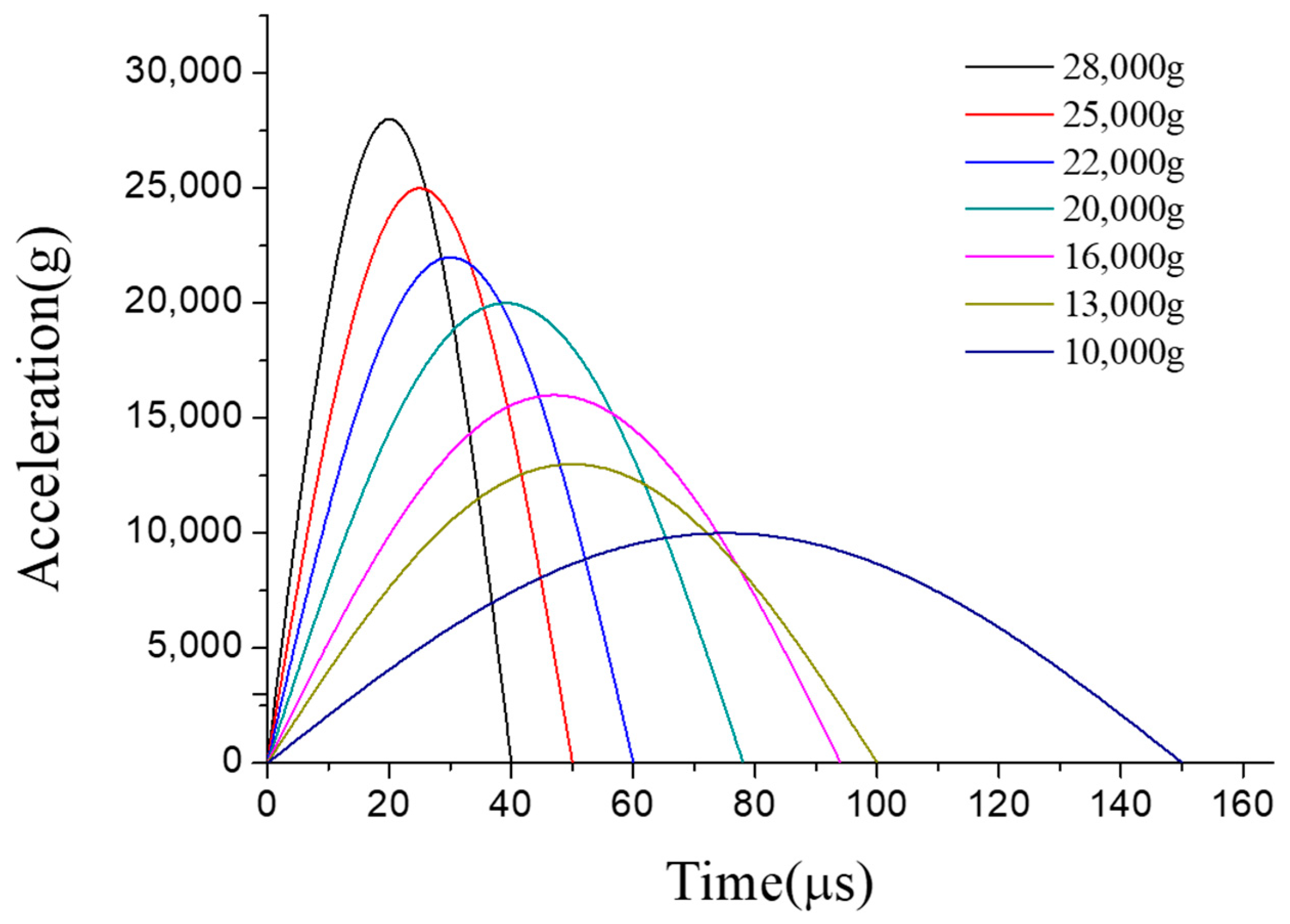
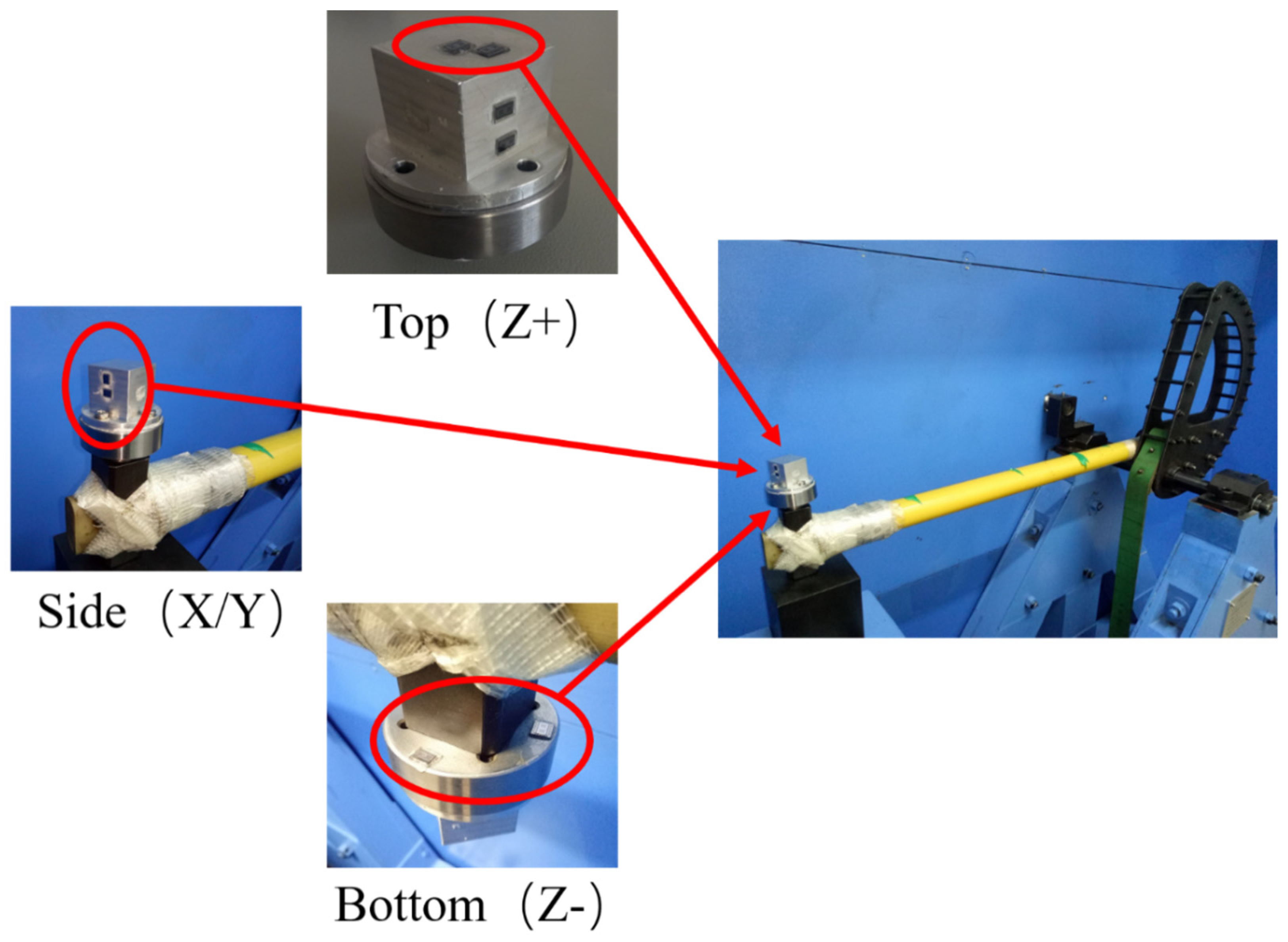
4.1. Experimental Method
4.2. Experimental Results
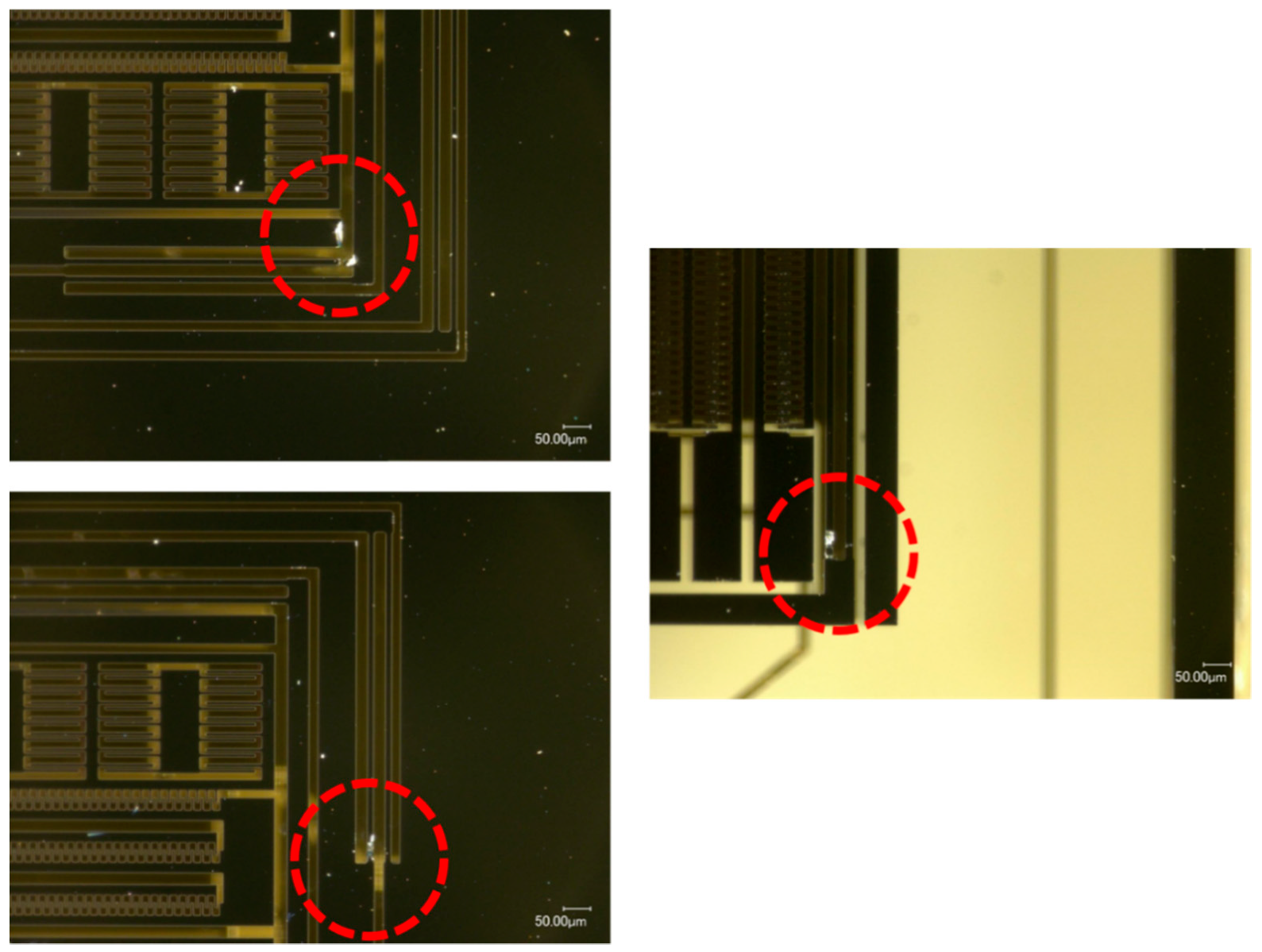
4.2.1. MEMS Tuning Fork Gyroscope Failure under Z-Axis Shock Impact
4.2.2. MEMS Tuning Fork Gyroscope Failure under X-Axis/Y-Axis Shock Impact
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Maluf, N. An introduction to microelectromechanical systems engineering. Meas. Sci. Technol. 2002, 13, 229. [Google Scholar] [CrossRef]
- Hokka, J.; Raami, J.; Hyvonen, H. Methods for reliability assessment of MEMS devices—Case studies of a MEMS microphone and a 3-axis MEMS gyroscope. In Proceedings of the 62nd IEEE Electronic Components and Technology Conference (ECTC), San Diego, CA, USA, 29 May–01 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 62–69. [Google Scholar]
- O’Reilly, R.; Tang, H.; Chen, W. High-g testing of MEMS devices, and why. In SENSORS, 2008 IEEE; IEEE: Piscataway, NJ, USA, 2008; pp. 145–151. [Google Scholar]
- Scaysbrook, I.W.; Cooper, S.J.; Whitley, E.T. A miniature, gun-hard MEMS IMU for guided projectiles, rockets and missiles. In Proceedings of the IEEE Position Location and Navigation Symposium (PLANS), Monterey, CA, USA, 26–29 April 2004; pp. 26–34. [Google Scholar]
- Habibi, S.; Cooper, S.J.; Stauffer, J.M.; Dutoit, B. Gun hard inertial measurement unit based on MEMS capacitive accelerometer and rate sensor. In Proceedings of the IEEE Position Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2008; pp. 232–237. [Google Scholar]
- Li, J.; Broas, M.; Makkonen, J.; Mattila, T.T.; Hokka, J.; Paulasto-Kröckel, M. Shock impact reliability and failure analysis of a three-axis MEMS tuning fork gyroscope. J. Microelectromechan. Syst. 2014, 23, 347–355. [Google Scholar] [CrossRef]
- Shi, Y.B.; Zhu, Z.Q.; Liu, X.P.; Liu, J.; Tan, Q.L. Dynamic property test of a novel high-g micro-accelerometer. In Proceedings of the IEEE 8th international conference on ASIC, Changsha, China, 20–23 October 2009; pp. 633–635. [Google Scholar]
- Wagner, U.; Muller-Fiedler, R.; Bagdahn, J.; Michel, B.; Paul, O. Mechanical reliability of epipoly MEMS structures under shock load. In Proceedings of the 12th International Conference on Solid-State Sensors, Actuators and Microsystems, Boston, MA, USA, 8–12 June 2003; pp. 175–178. [Google Scholar]
- Dai, K.R.; Wang, X.F.; Yi, F.; Yin, Y.J.; Jiang, C.; Niu, S.M.; Li, Q.Y.; You, Z. Discharge voltage behavior of electric double-layer capacitors during high-g impact and their application to autonomously sensing high-g accelerometers. Nano Res. 2018, 11, 1146–1156. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, B.; Chen, D.J.; Lin, L.W. Drop-shock dynamic analysis of MEMS/package system. In Proceedings of the 23rd IEEE International Conference on Micro Electro Mechanical Systems, Hong Kong, China, 24–28 January 2010; pp. 520–523. [Google Scholar]
- Srikar, V.T.; Senturia, S.D. The reliability of microelectromechanical systems in shock environments. J. Microelectromech. Syst. 2002, 11, 206–214. [Google Scholar] [CrossRef]
- Younis, M.I.; Miles, R. Response of MEMS devices under shock loads. In ASME 2005 international mechanical engineering congress and exposition; American Society of Mechanical Engineers: New York City, NY, USA, 2005; pp. 499–506. [Google Scholar]
- Sundaram, S.; Torment, M.; Timotijevic, B.; Lockhart, R.; Overstolz, T.; Stanley, R.P.; Shea, H.R. Vibration and shock reliability of MEMS: Modelling and experimental validation. J. Micromech. Microeng. 2011, 21, 1–13. [Google Scholar] [CrossRef]
- Zhang, P.; He, C.H.; Zhang, J.M.; Zhao, Q.C.; Yang, Z.C.; Zhang, D.C.; Yan, G.Z. Investigation of reliability of MEMS gyroscopes under different shock conditions. In Proceedings of the IEEE 10th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Xian, China, 7–11 April 2015; pp. 441–444. [Google Scholar]
- Zhou, J.; Jiang, T.; Jiao, J.W.; Wu, M. Design and fabrication of a micromachined gyroscope with high shock resistance. Microsyst. Technol. 2014, 20, 137–144. [Google Scholar] [CrossRef]
- Jiang, T.; Zhou, J.; Feng, F. Study on designs of stops for MEMS devices in shock environment. Appl. Mech. Mater. 2012, 184, 510–515. [Google Scholar] [CrossRef]
- Li, G.X.; Shemansky, F.A. Drop test and analysis on micromachined structures. Sens. Actuators. 2000, 85, 280–286. [Google Scholar] [CrossRef]
- Ghisi, A.; Fachin, F.; Mariani, S.; Zerbini, S. Multi-scale analysis of polysilicon MEMS sensors subject to accidental drops: Effect of packaging. Microelectron. Reliab. 2009, 49, 340–349. [Google Scholar] [CrossRef]
- Alsaleem, F.; Younis, M.I.; Miles, R. An investigation into the effect of the PCB motion on the dynamic response of MEMS devices under mechanical shock loads. J. Electron. Packag. 2008, 130, 1–10. [Google Scholar] [CrossRef]
- Maboudian, R.; Howe, R.T. Critical review: Adhesion in surface micromechanical structures. J. Vac. Sci. Technol. B 1997, 15, 1–20. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Wang, L.S.; Yu, T.X. Mechanics of adhesion in MEMS—a review. J. Adhes. Sci. Technol. 2003, 17, 519–546. [Google Scholar] [CrossRef]
- Johnstone, R.W.; Parameswaran, M. Theoretical limits on the freestanding length of cantilevers produced by surface micromachining technology. J. Micromech. Microeng. 2002, 12, 855–861. [Google Scholar] [CrossRef]
- Hwang, H.S.; Song, J.T. An effective method to prevent stiction problems using a photoresist sacrificial layer. J. Micromech. Microeng. 2006, 17, 245–249. [Google Scholar] [CrossRef]
- Jafri, I.H.; Busta, H.; Walsh, S.T. Critical point drying and cleaning for MEMS technology. In MEMS Reliability for Critical and Space Applications; International Society for Optics and Photonics: Santa Clara, CA, USA, 1999; pp. 51–59. [Google Scholar]
- Suwito, W.; Dunn, M.L.; Cunningham, S.J.; Read, D.T. Elastic moduli, strength, and fracture initiation at sharp notches in etched single crystal silicon microstructures. J. Appl. Phys. 1999, 85, 3519–3534. [Google Scholar] [CrossRef]
- Johansson, S.; Schweitz, J.A.; Tenerz, L.; Tiren, J. Fracture testing of silicon microelements in situ in a scanning electron microscope. J. Appl. Phys. 1988, 63, 4799–4803. [Google Scholar] [CrossRef]
- Budd, C.; Dux, F. Chattering and related behaviour in impact oscillators. Phil. Trans. R. Soc. A. 1994, 347, 365–389. [Google Scholar] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Young’s Modulus (GPa) | Poisson’s Ratio |
|---|---|---|
| Single-Crystal Silicon | 130 | 0.28 |
| Borosilicate Glass | 64 | 0.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, J.; Li, J.; Xu, L. The Effect of Displacement Constraints on the Failure of MEMS Tuning Fork Gyroscopes under Shock Impact. Micromachines 2019, 10, 343. https://doi.org/10.3390/mi10050343
Lian J, Li J, Xu L. The Effect of Displacement Constraints on the Failure of MEMS Tuning Fork Gyroscopes under Shock Impact. Micromachines. 2019; 10(5):343. https://doi.org/10.3390/mi10050343
Chicago/Turabian StyleLian, Jiangkai, Jianhua Li, and Lixin Xu. 2019. "The Effect of Displacement Constraints on the Failure of MEMS Tuning Fork Gyroscopes under Shock Impact" Micromachines 10, no. 5: 343. https://doi.org/10.3390/mi10050343