An Interface ASIC for MEMS Vibratory Gyroscopes with Nonlinear Driving Control

Abstract
:1. Introduction
2. Mechanical Vibration Modeling and Calculation
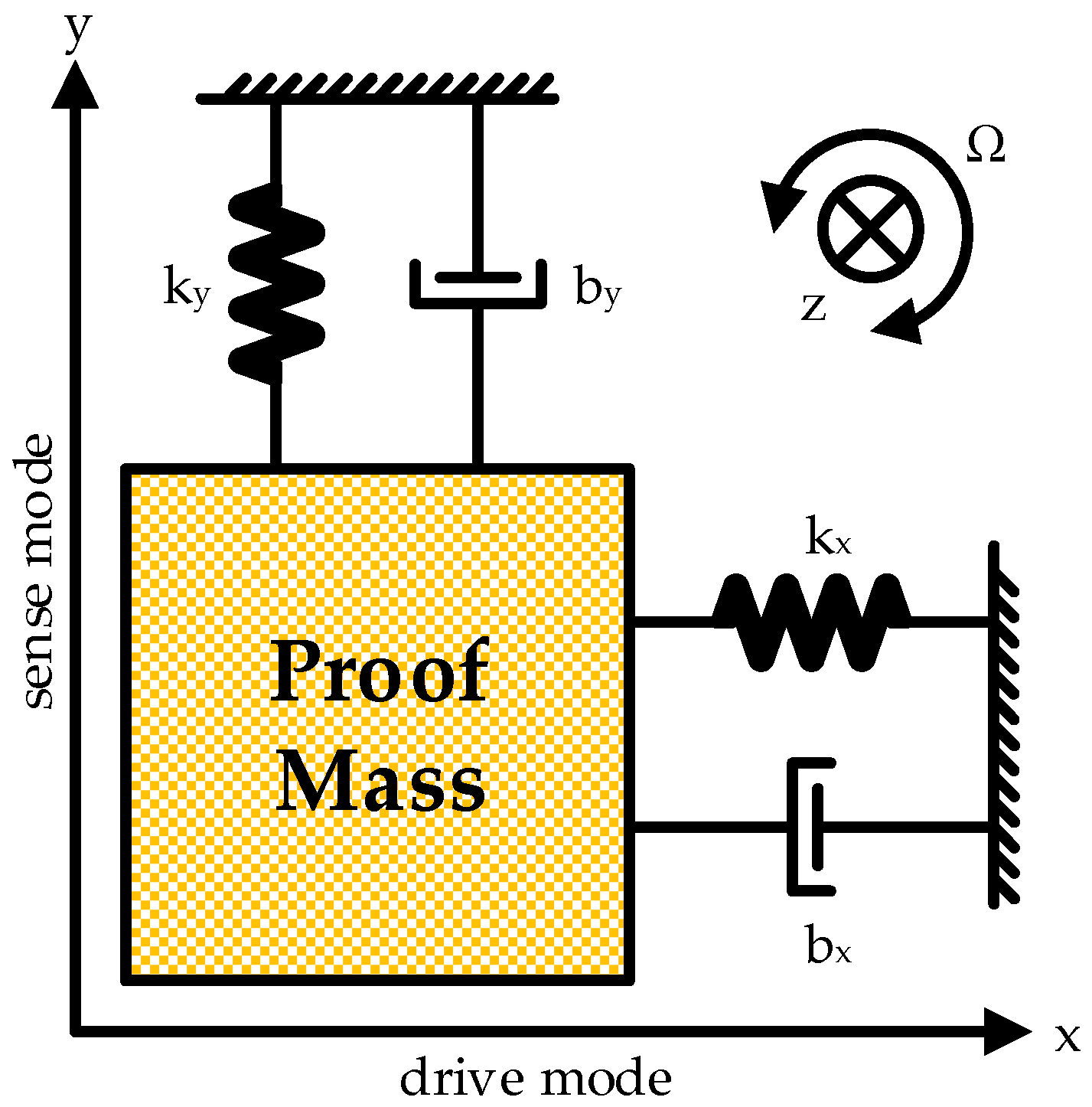
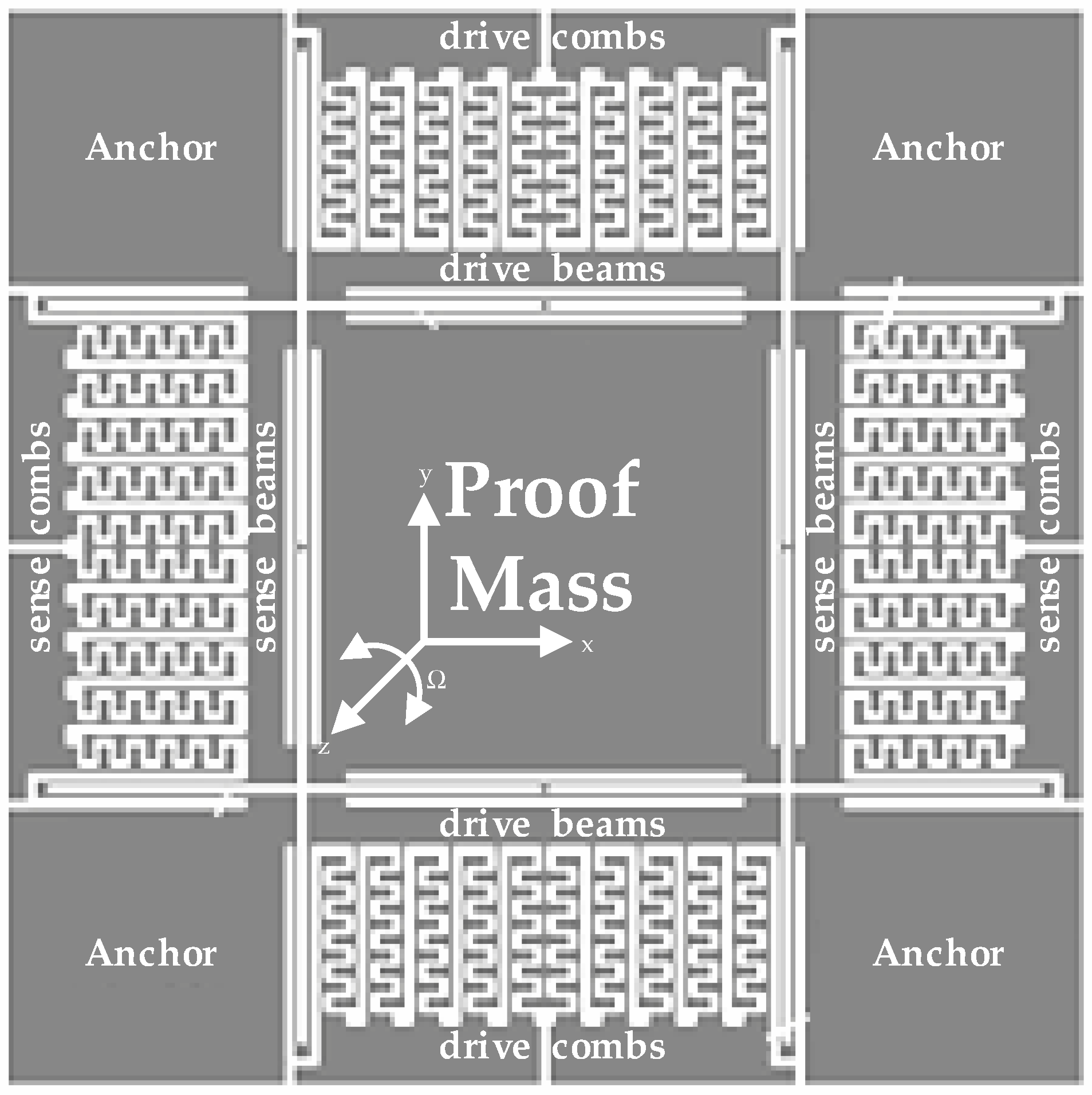
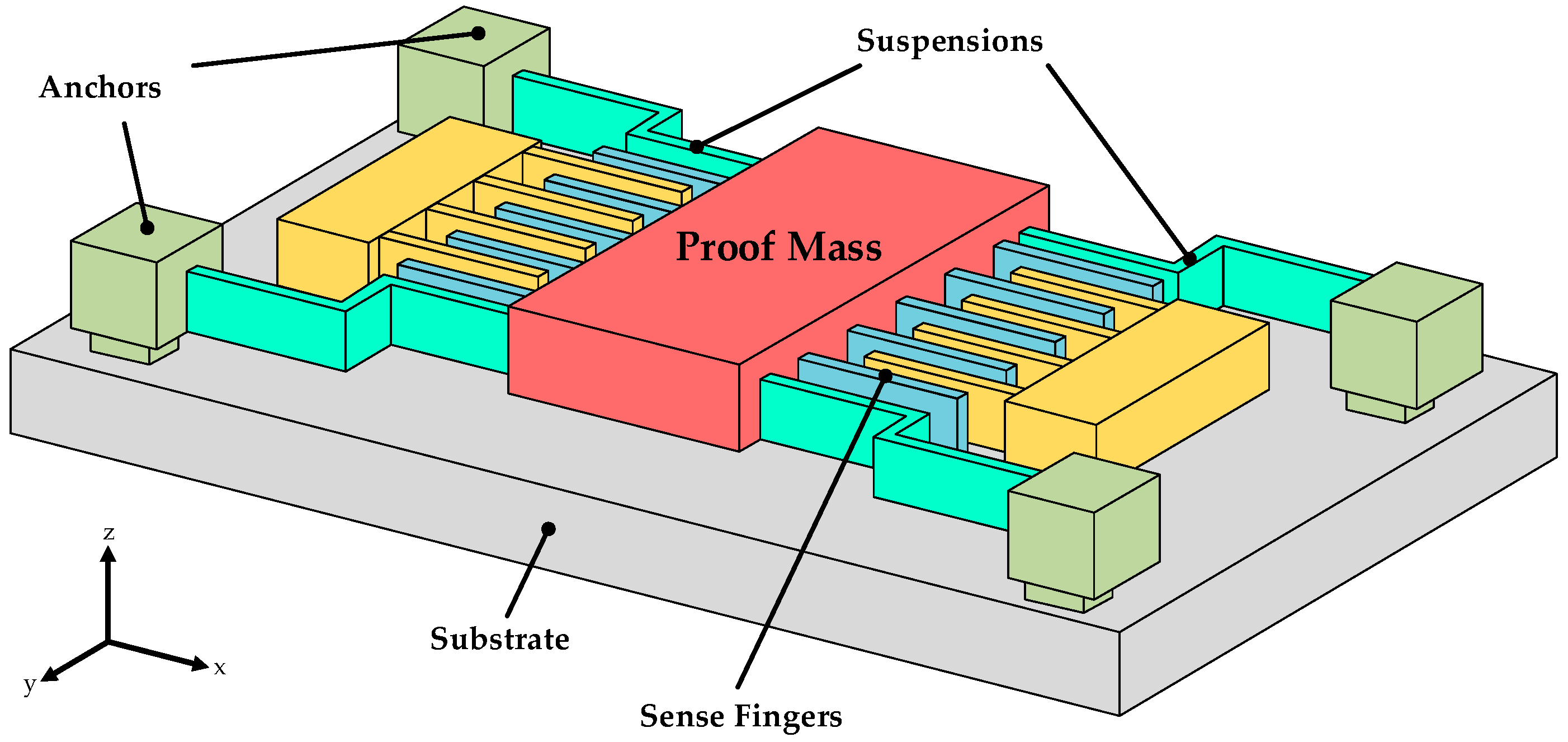
2.1. Mechanical Model Analysis
2.2. Mechanical Motion Regulation
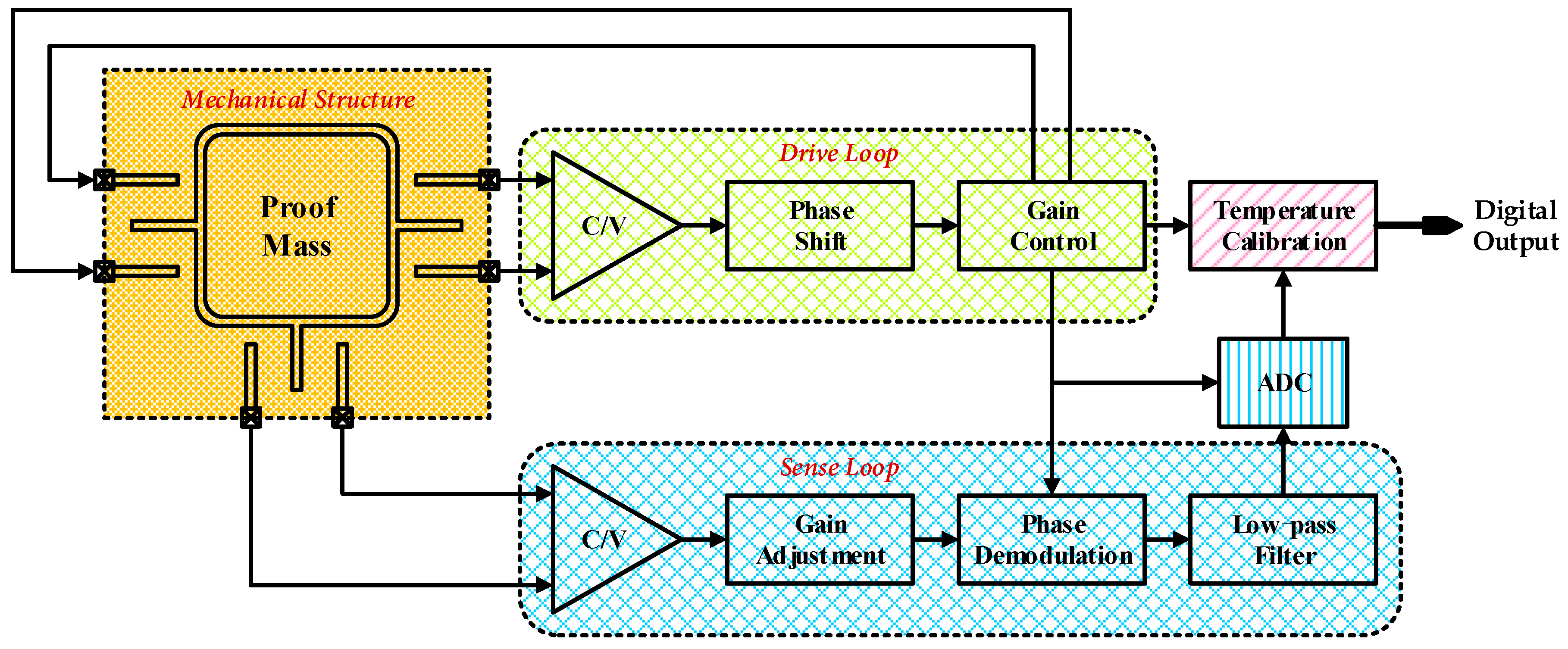
3. System Description and Topology Analysis
3.1. Research on Self-Excited Drive Loop
3.2. Research on Precise Sense Loop
4. Circuit Implementation Details
4.1. Nonlinear Multiplier
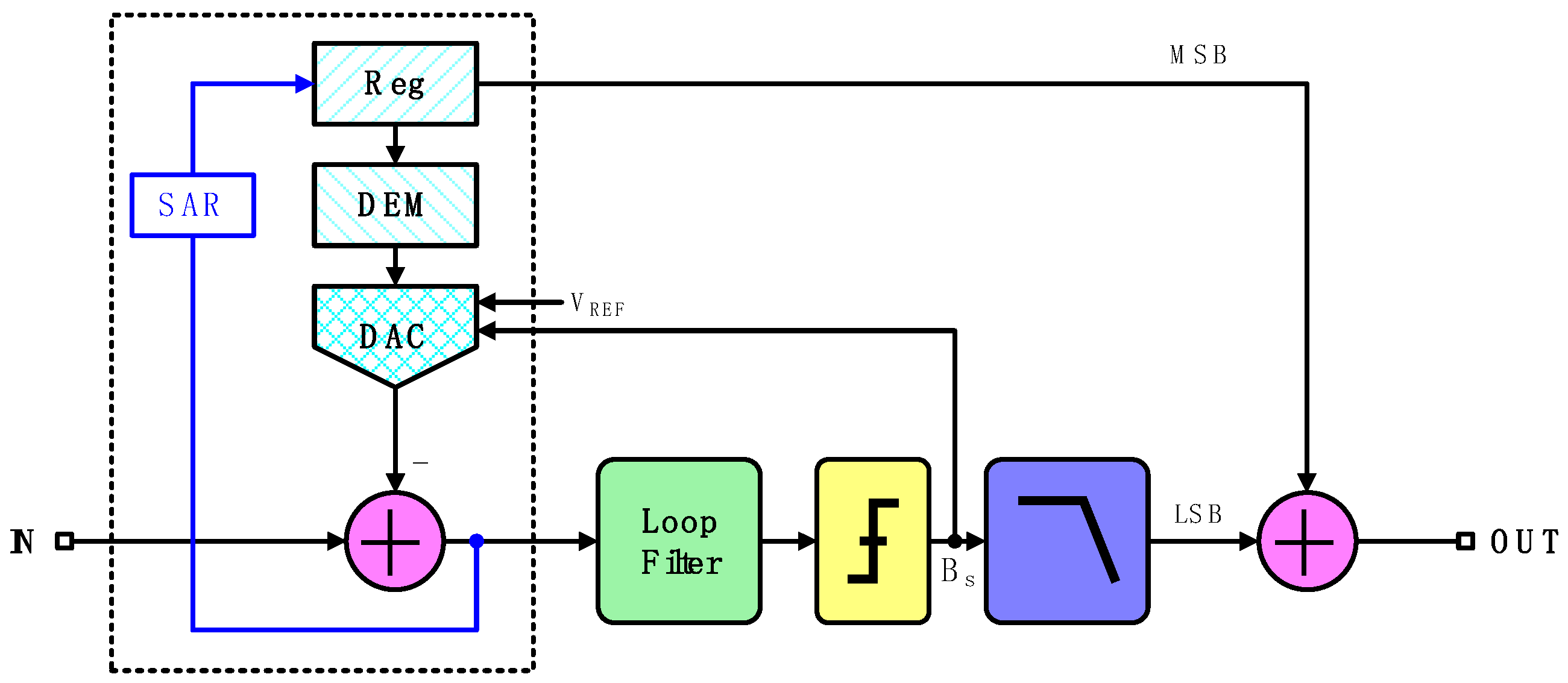
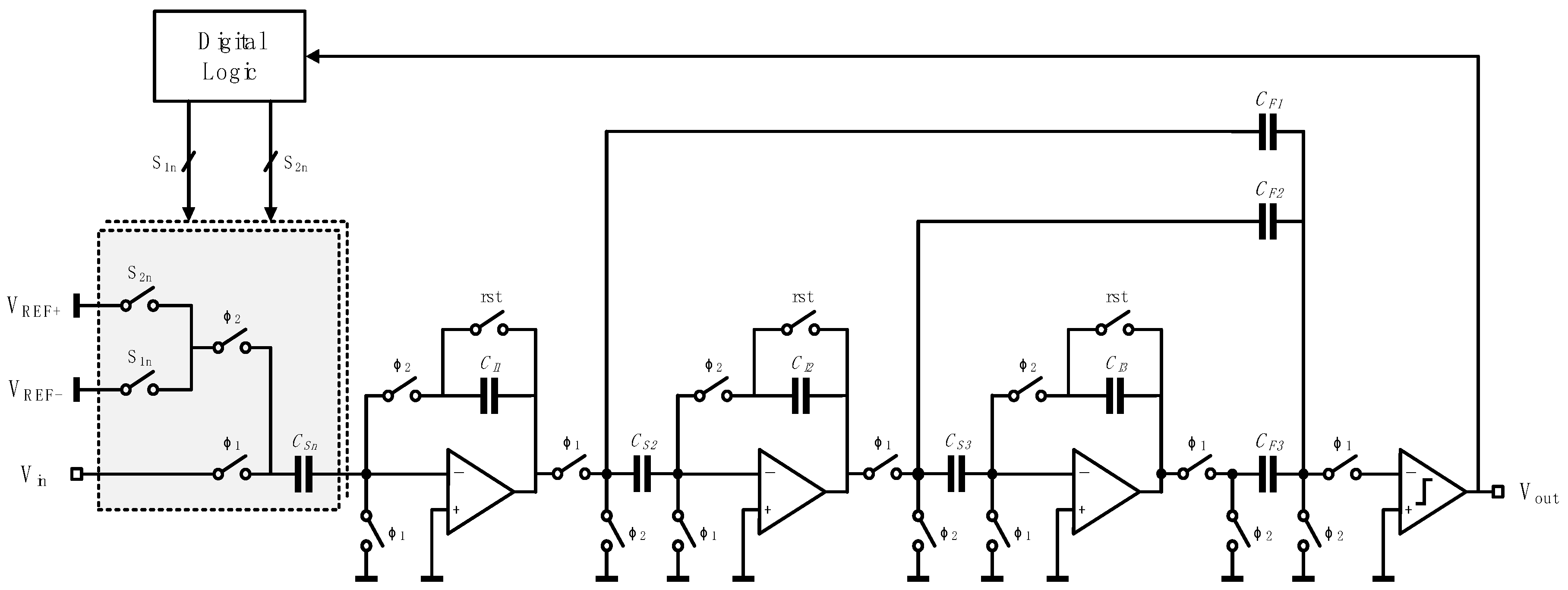
4.2. Incremental Zoom ADC
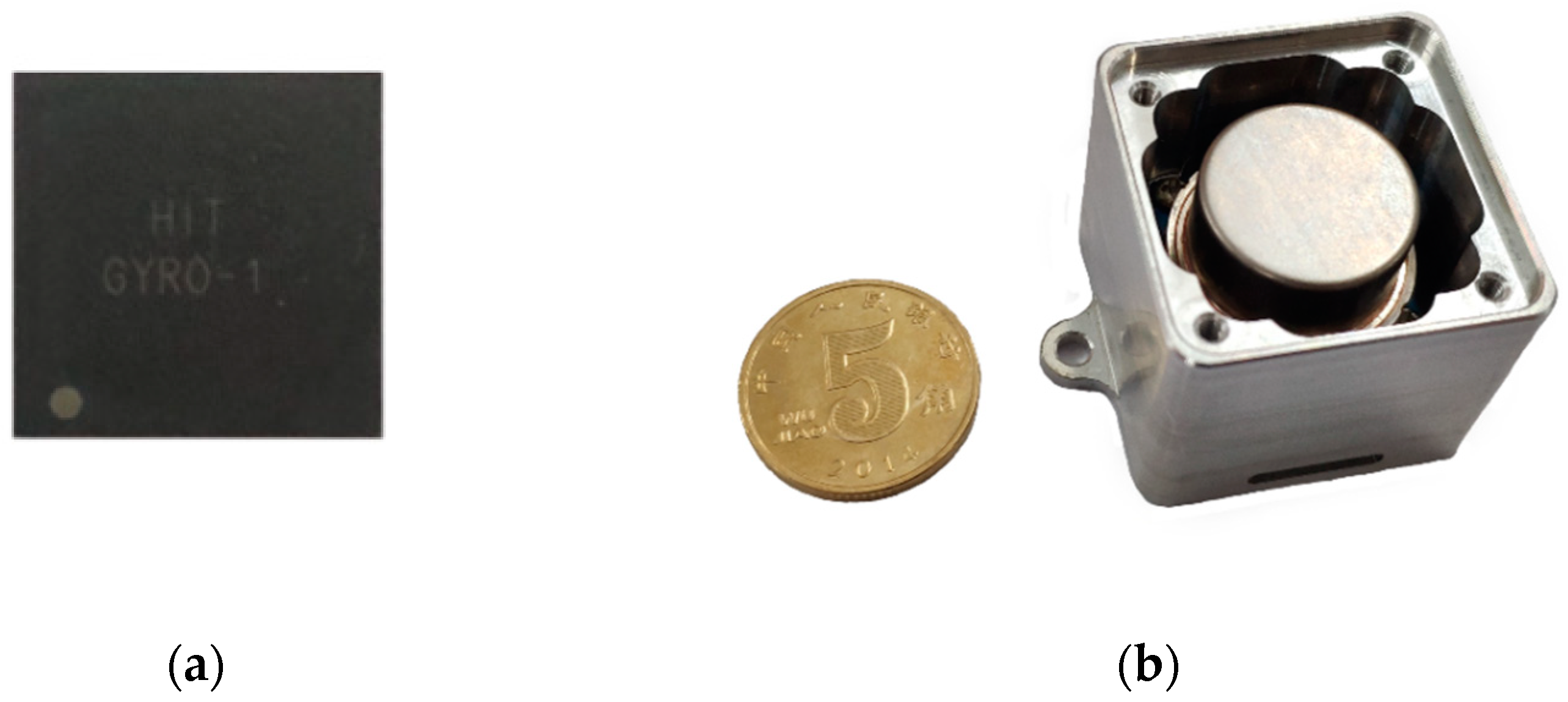
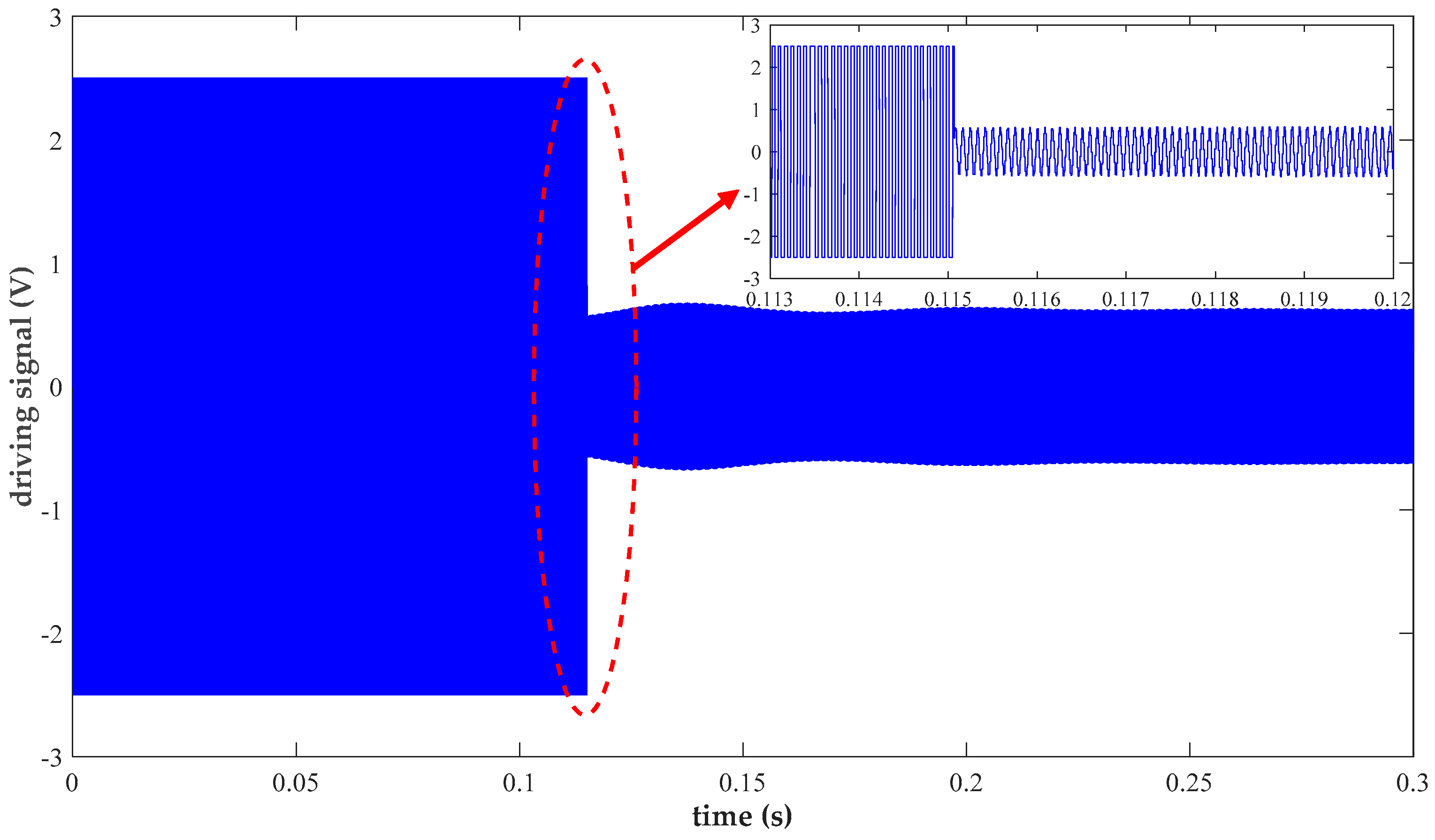
5. Experimental Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, F.; Li, X.X.; Kraft, M. Electromechanical sigma-delta modulators (ΣΔM) force feedback interfaces for capacitive MEMS inertial sensors: A review. IEEE Sens. J. 2016, 16, 6476–6495. [Google Scholar] [CrossRef]
- Rombach, S.; Marx, M.; Nessler, S.; De Dorigo, D.; Maurer, M.; Manoli, Y. An interface ASIC for MEMS vibratory gyroscopes with a power of 1.6 mW, 92 dB DR and 0.007°/s/ noise floor over a 40 Hz band. IEEE J. Solid-State Circuits 2016, 51, 1915–1927. [Google Scholar] [CrossRef]
- Huang, F.X.; Yin, L. Analysis and design of the system of a total digital Si-gyroscope. Int. J. Mod. Phys. B 2017, 31. [Google Scholar] [CrossRef]
- Li, X.Y.; Hu, J.P.; Liu, X.W. A high-performance digital interface circuit for a high-Q micro-electromechanical system accelerometer. Micromachines 2018, 9, 675. [Google Scholar] [CrossRef] [PubMed]
- Picerno, P. 25 years of lower limb joint kinematics by using inertial and magnetic sensors: A review of methodological approaches. Gait Posture 2017, 51, 239–246. [Google Scholar] [CrossRef]
- Li, X.Y.; Hu, J.P.; Chen, W.P.; Yin, L.; Liu, X.W. A novel high-precision digital tunneling magnetic resistance-type sensor for the nanosatellites’ space application. Micromachines 2018, 9, 121. [Google Scholar] [CrossRef]
- Ahn, C.H.; Ng, E.J.; Hong, V.A.; Yang, Y.S.; Lee, B.J.; Flader, I.; Kenny, T.W. Mode-matching of wineglass mode disk resonator gyroscope in (100) single crystal silicon. J. Microelectromech. Syst. 2015, 24, 343–350. [Google Scholar] [CrossRef]
- Maeda, D.; Ono, K.; Giner, J.; Matsumoto, M.; Kanamaru, M.; Sekiguchi, T.; Hayashi, M. MEMS gyroscope with less than 1-deg/h bias instability variation in temperature range from −40 °C to 125 °C. IEEE Sens. J. 2018, 18, 1006–1015. [Google Scholar] [CrossRef]
- Sonmezoglu, S.; Alper, S.E.; Akin, T. An automatically mode-matched MEMS gyroscope with wide and tunable bandwidth. J. Microelectromech. Syst. 2014, 23, 284–297. [Google Scholar] [CrossRef]
- Qiu, B.M.; Wang, J.W.; Li, P.H. Full digital control of hemispherical resonator gyro under force-to-rebalance mode. IEEE Sens. J. 2015, 15, 71–75. [Google Scholar]
- Lee, J.; Yun, S.W.; Rhim, J. Design and verification of a digital controller for a 2-piece hemispherical resonator gyroscope. Sensors 2016, 16, 555. [Google Scholar] [CrossRef]
- Challoner, A.D.; Ge, H.H.; Liu, J.Y. Boeing Disc Resonator Gyroscope. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 504–514. [Google Scholar]
- Ahn, C.H.; Shin, D.D.; Hong, V.A.; Yang, Y.S.; Ng, E.J.; Chen, Y.H.; Flader, I.B.; Kenny, T.W. Encapsulated disk resonator gyroscope with differential internal electrodes. In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 962–965. [Google Scholar]
- Yoon, S.; Park, U.; Rhim, J.; Yang, S.S. Tactical grade MEMS vibrating ring gyroscope with high shock reliability. Microelectron. Eng. 2015, 142, 22–29. [Google Scholar] [CrossRef]
- Chouvion, B.; McWilliam, S.; Popov, A.A. Effect of nonlinear electrostatic forces on the dynamic behaviour of a capacitive ring-based Coriolis Vibrating Gyroscope under severe shock. Mech. Syst. Signal Process. 2018, 106, 395–412. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, J.; Wang, X.; Xia, G.M.; Shi, Q.; Qiu, A.P.; Xu, Y.P. A sub-0.1 degrees/h bias-instability split-mode MEMS gyroscope with CMOS readout circuit. IEEE J. Solid-State Circuits 2018, 53, 2636–2650. [Google Scholar] [CrossRef]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined inertial sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef]
- Chae, Y.; Souri, K.; Makinwa, K.A.A. A 6.3 μW 20 bit incremental zoom-ADC with 6 ppm INL and 1 μV offset. IEEE J. Solid-State Circuits 2013, 48, 3019–3027. [Google Scholar] [CrossRef]
- Lv, R.S.; Chen, W.P.; Yin, L.; Fu, Q.; Liu, X.W.; Yan, J.M. A closed-loop ΣΔ modulator for micromechanical capacitive sensors. IEICE Electron Express 2018, 15. [Google Scholar] [CrossRef]
- Lv, R.S.; Chen, W.P.; Liu, X.W. A high-dynamic-range switched-capacitor sigma-delta ADC for digital micromechanical vibration gyroscopes. Micromachines 2018, 9, 372. [Google Scholar] [CrossRef] [PubMed]
- He, C.H.; Zhao, Q.C.; Huang, Q.W.; Liu, D.C.; Yang, Z.C.; Zhang, D.C.; Yan, G.Z. A MEMS vibratory gyroscope with real-time mode-matching and robust control for the sense mode. IEEE Sens. J. 2015, 15, 2069–2077. [Google Scholar] [CrossRef]
- Marx, M.; De Dorigo, D.; Nessler, S.; Rombach, S.; Manoli, Y. A 27 µW 0.06 mm2 background resonance frequency tuning circuit based on noise observation for a 1.71 mW CT-ΔΣ MEMS gyroscope readout system with 0.9 °/h bias instability. IEEE J. Solid-State Circuits 2018, 53, 174–186. [Google Scholar] [CrossRef]
- Tan, Z.C.; Nguyen, K.; Yan, J.; Samuels, H.; Keating, S.; Crocker, P.; Clark, B. A dual-axis MEMS vibratory gyroscope ASIC with 0.0061 °/s/√Hz noise floor over 480 Hz bandwidth. In Proceedings of the 2017 IEEE Asian Solid-State Circuits Conference (A-SSCC), Seoul, Korea, 6–8 November 2017; pp. 21–24. [Google Scholar]
- Balachandran, G.K.; Petkov, V.P.; Mayer, T.; Balslink, T. A 3-axis gyroscope for electronic stability control with continuous self-test. IEEE J. Solid-State Circuits 2016, 51, 177–186. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
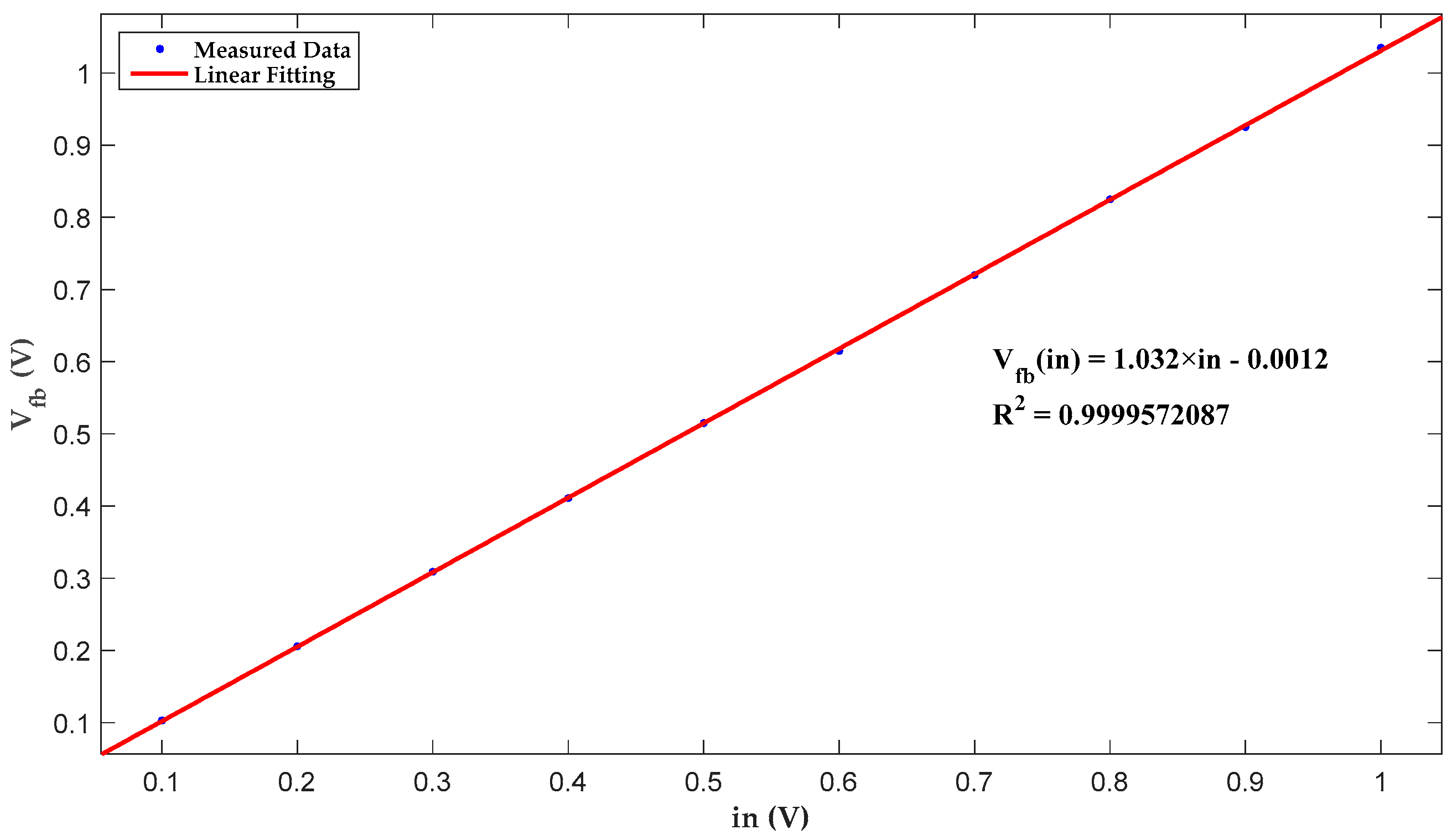
| in- (V) | Vfb- (V) |
|---|---|
| 0.1 | 0.103 |
| 0.2 | 0.206 |
| 0.3 | 0.309 |
| 0.4 | 0.411 |
| 0.5 | 0.515 |
| 0.6 | 0.615 |
| 0.7 | 0.720 |
| 0.8 | 0.825 |
| 0.9 | 0.925 |
| 1 | 1.035 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, R.; Fu, Q.; Yin, L.; Gao, Y.; Bai, W.; Zhang, W.; Zhang, Y.; Chen, W.; Liu, X. An Interface ASIC for MEMS Vibratory Gyroscopes with Nonlinear Driving Control. Micromachines 2019, 10, 270. https://doi.org/10.3390/mi10040270
Lv R, Fu Q, Yin L, Gao Y, Bai W, Zhang W, Zhang Y, Chen W, Liu X. An Interface ASIC for MEMS Vibratory Gyroscopes with Nonlinear Driving Control. Micromachines. 2019; 10(4):270. https://doi.org/10.3390/mi10040270
Chicago/Turabian StyleLv, Risheng, Qiang Fu, Liang Yin, Yuan Gao, Wei Bai, Wenbo Zhang, Yufeng Zhang, Weiping Chen, and Xiaowei Liu. 2019. "An Interface ASIC for MEMS Vibratory Gyroscopes with Nonlinear Driving Control" Micromachines 10, no. 4: 270. https://doi.org/10.3390/mi10040270