Graphene-Based Wireless Tube-Shaped Pressure Sensor for In Vivo Blood Pressure Monitoring


Abstract
:1. Introduction
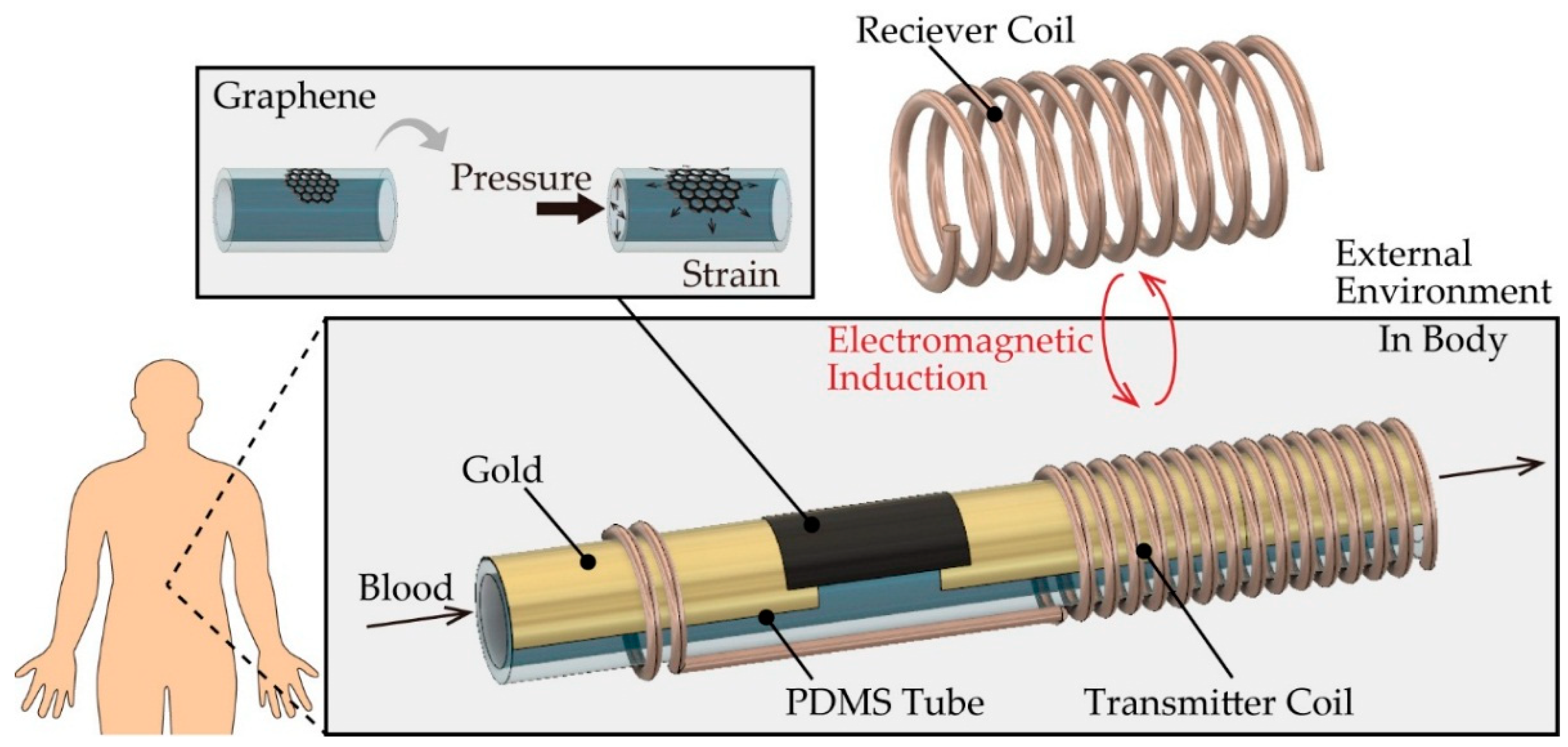
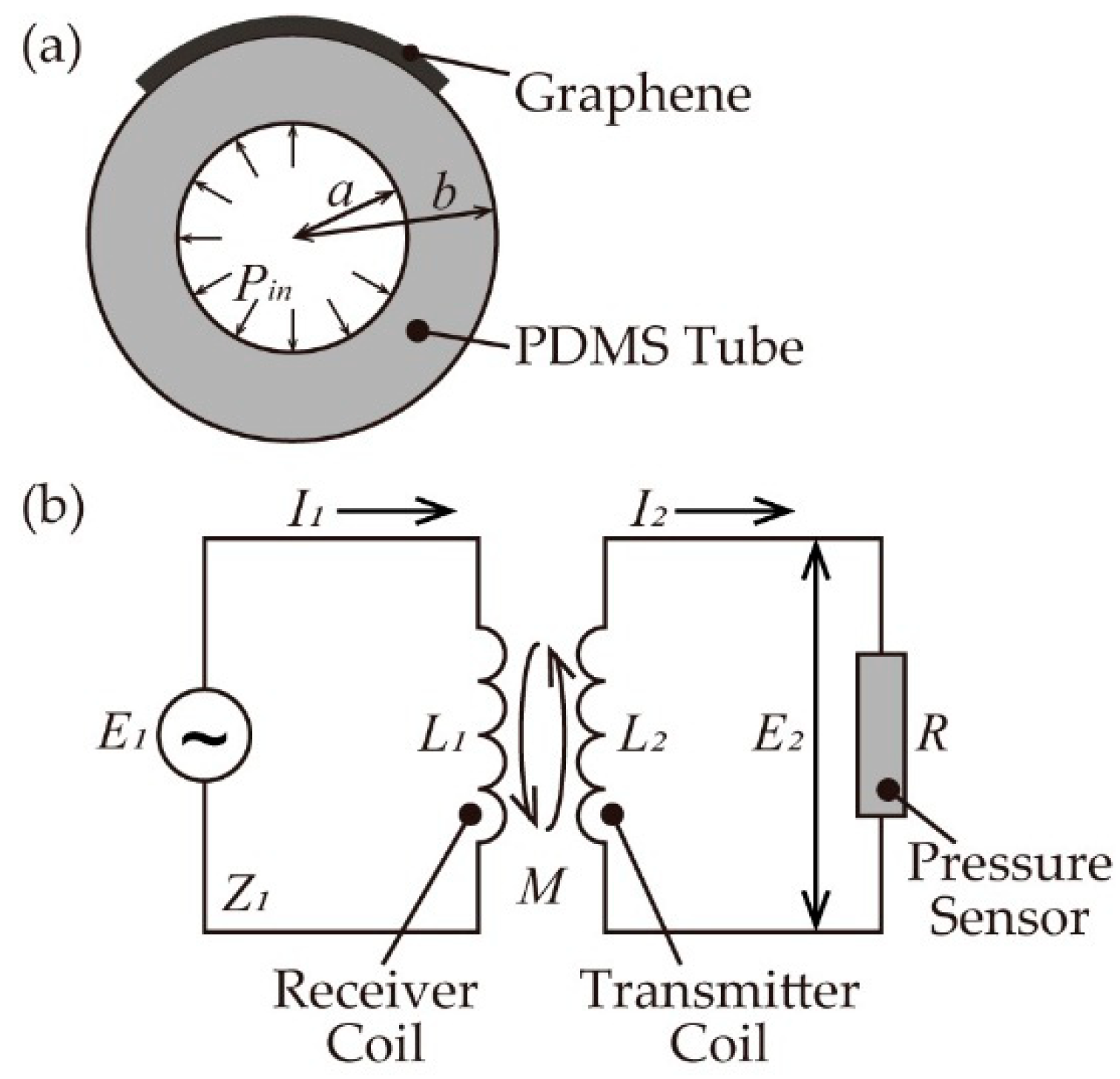
2. Principle and Design
3. Experimental Methods
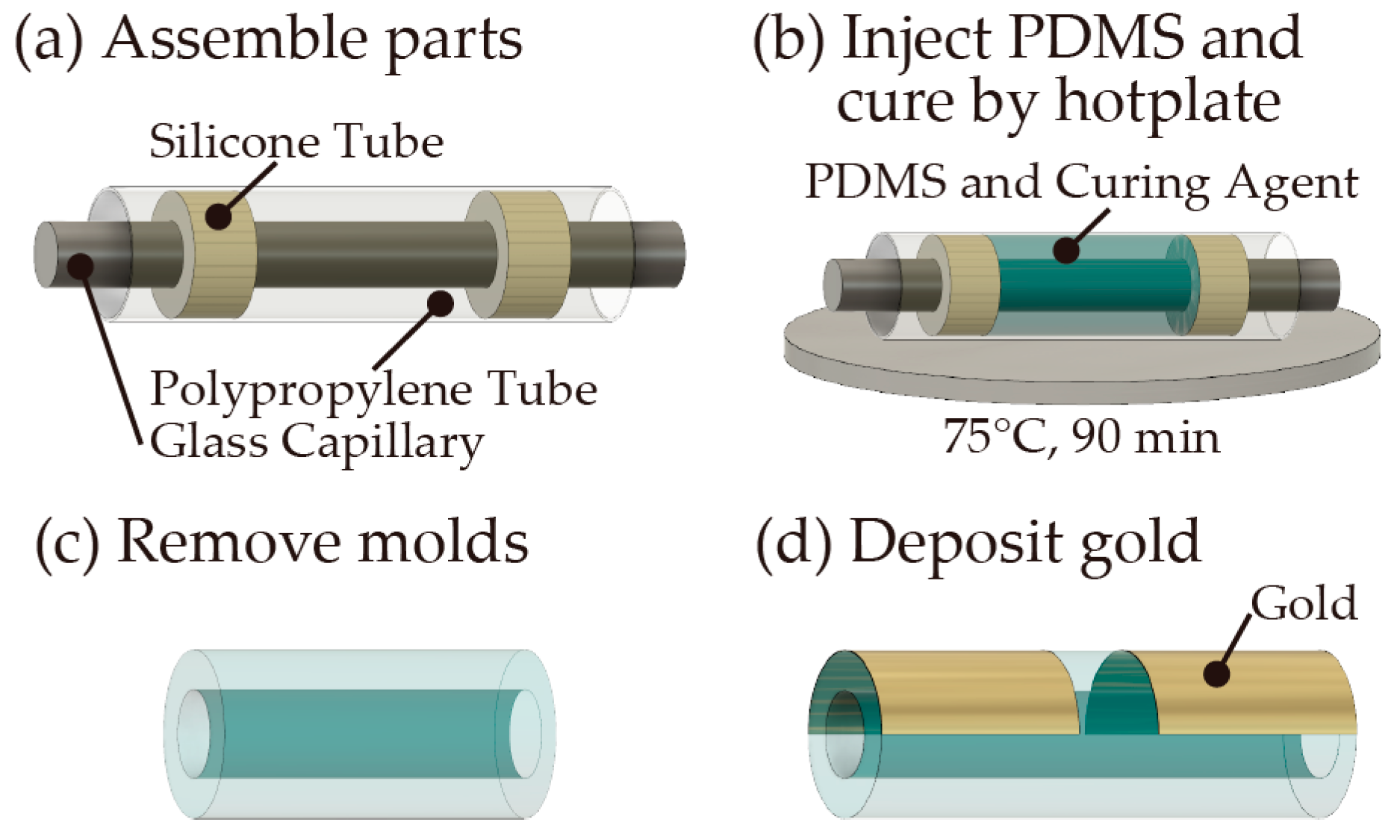
3.1. Fabrication of the PDMS Tube and Wiring
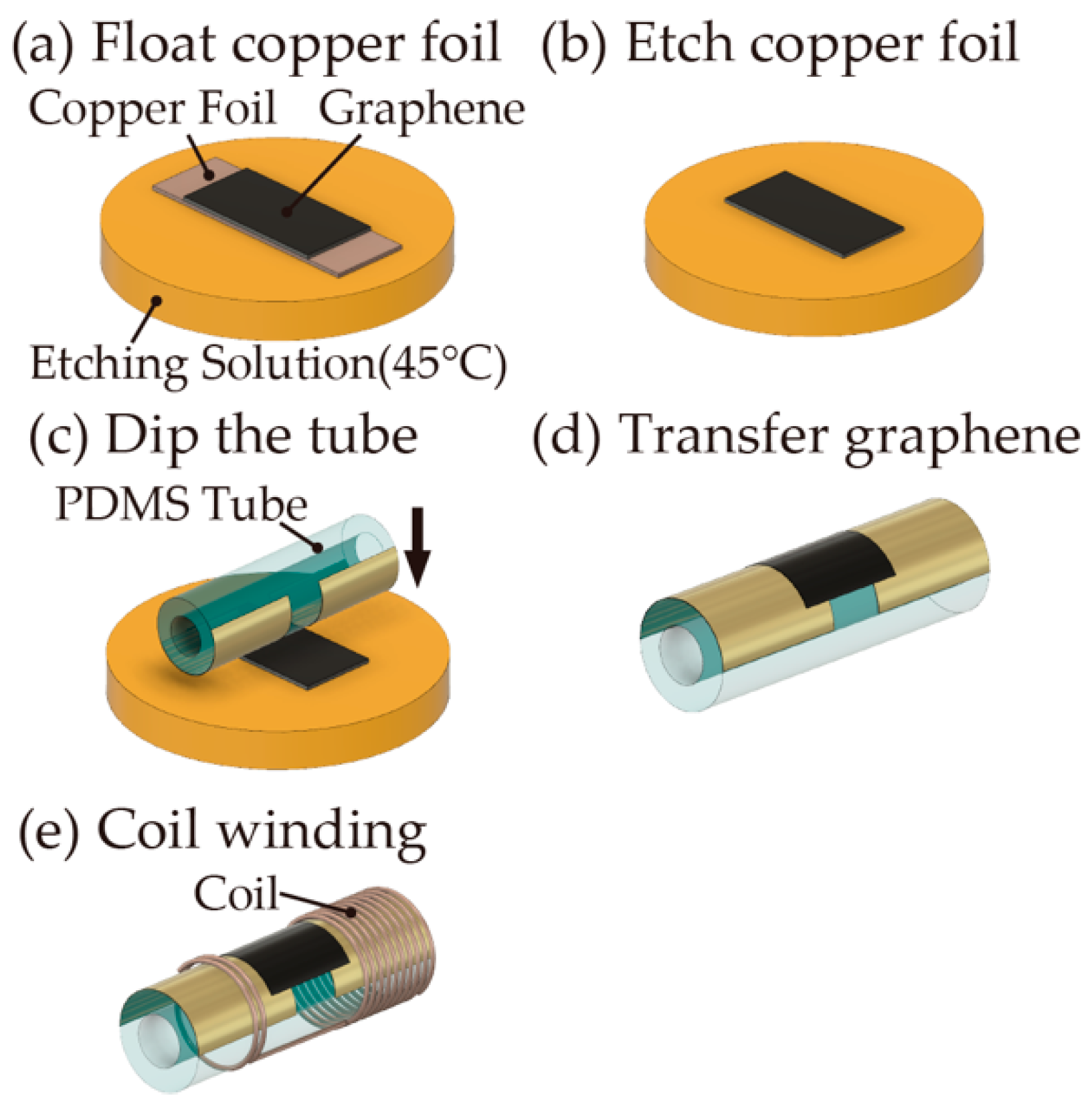
3.2. Transfer of the Graphene Sheet and Coil Winding
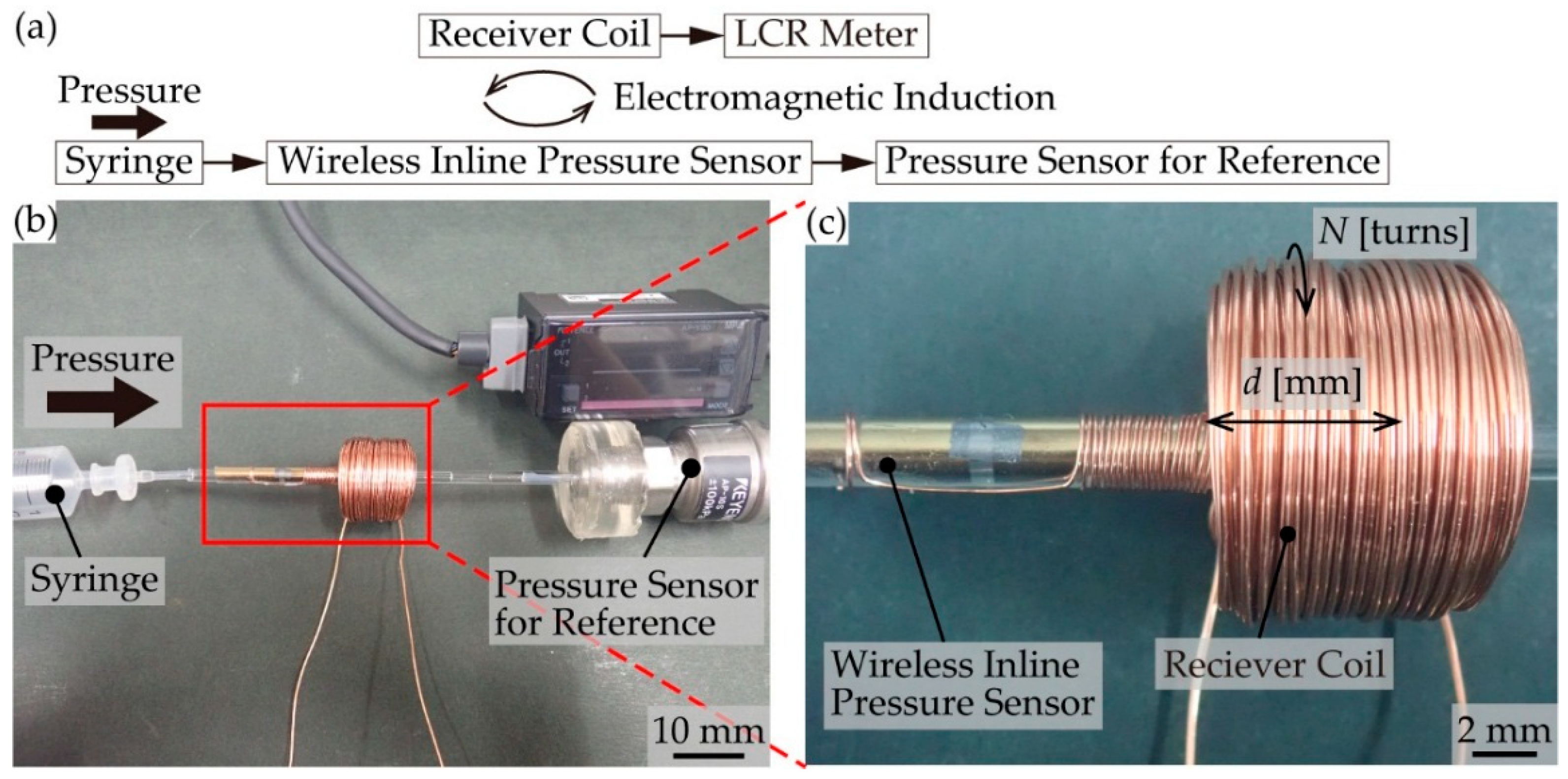
3.3. Pressure Measurement by the Fabricated Pressure Sensor
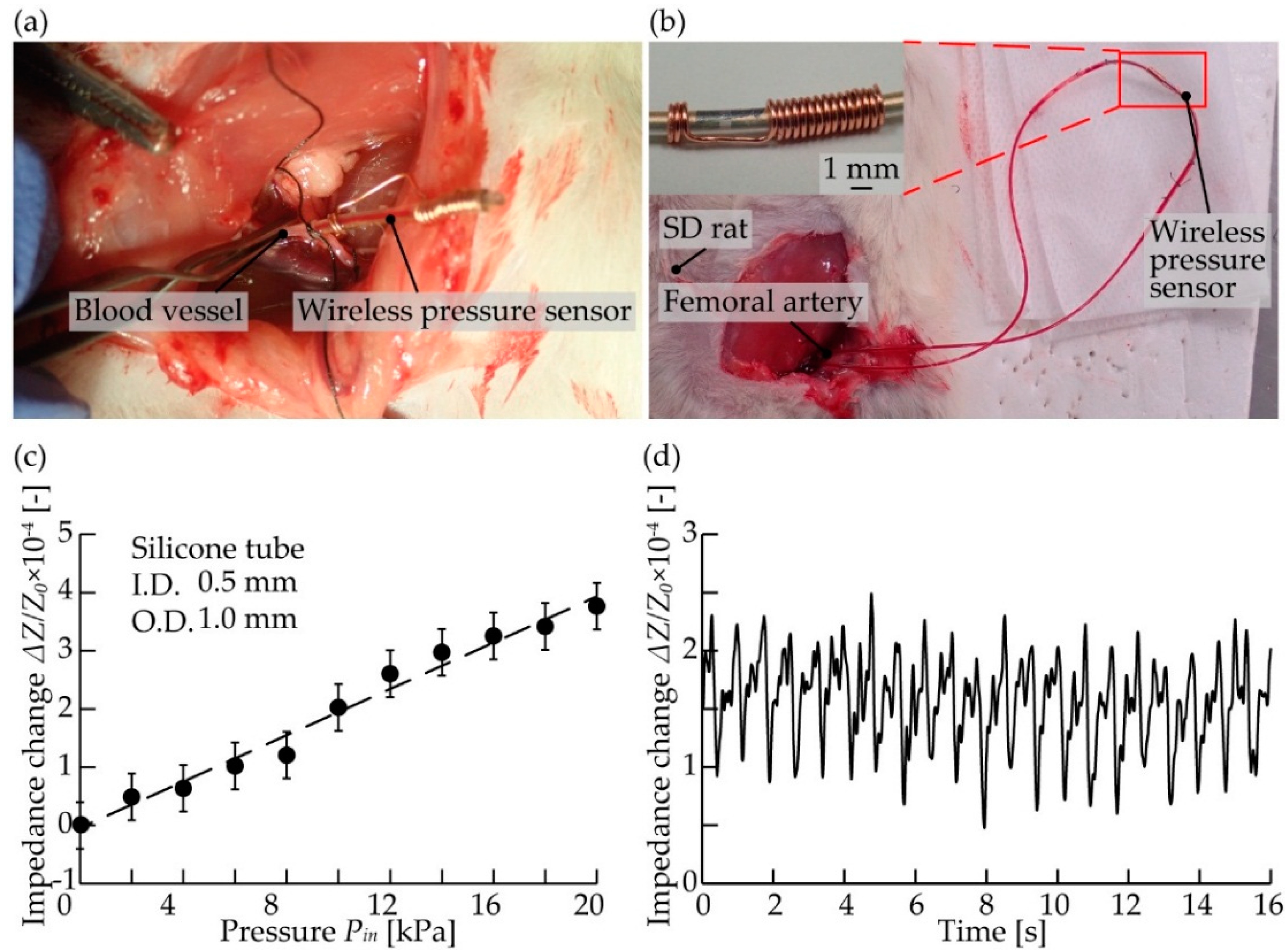
3.4. Pressure Measurement In Vivo
4. Results
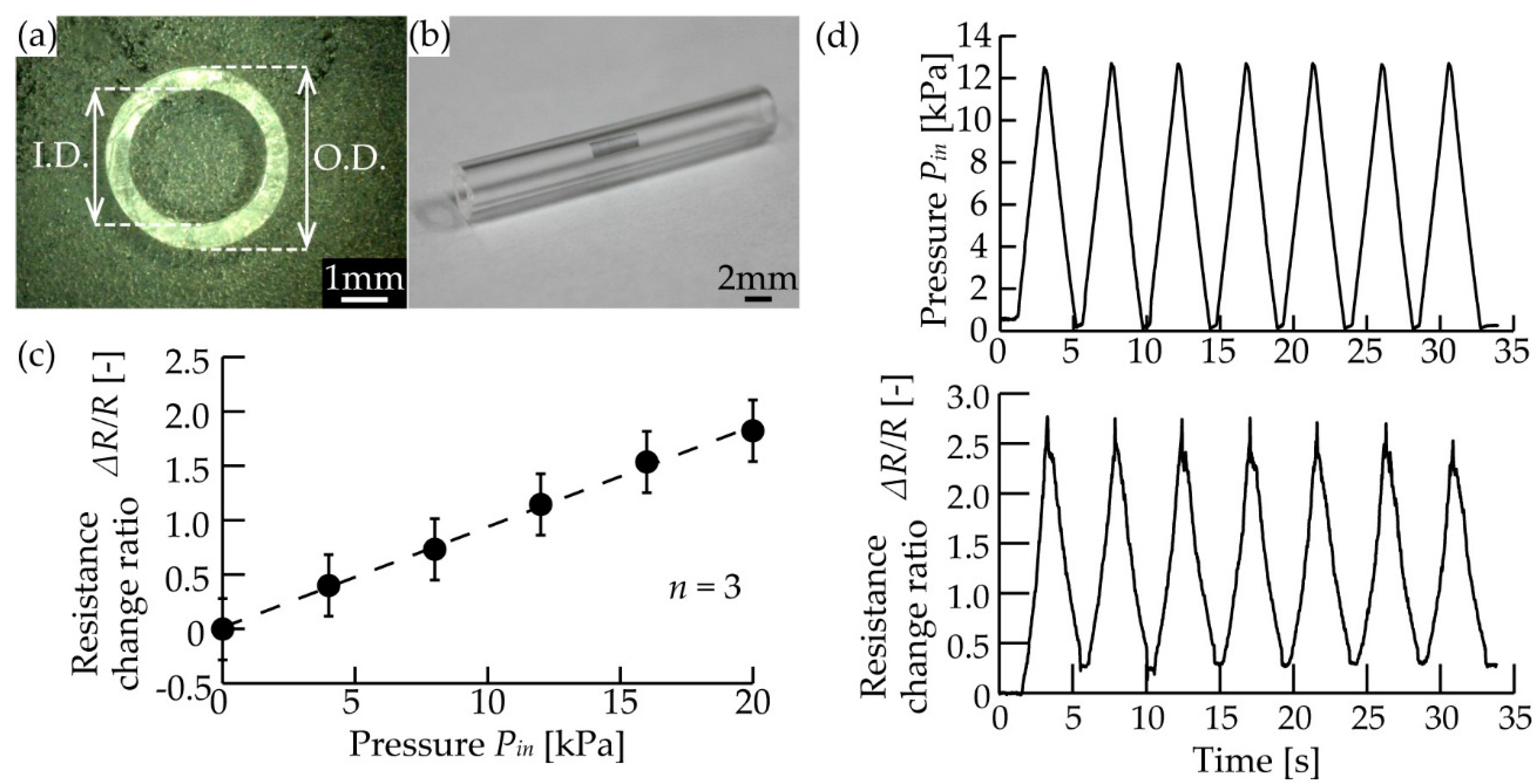
4.1. Fabricated Pressure Sensor
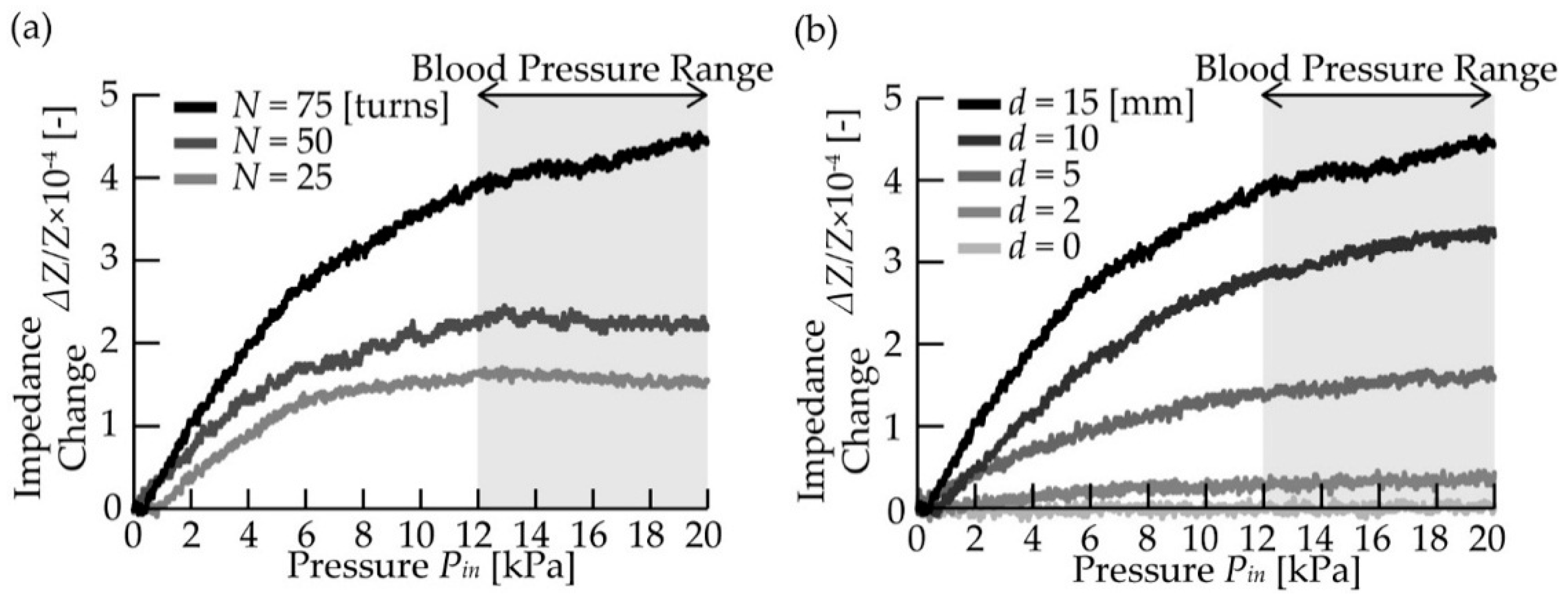
4.2. Wireless Pressure Measurements
4.3. Pressure Measurement In Vivo
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Patel, S.; Park, H.; Bonato, P.; Chan, L.; Rodgers, M. A review of wearable sensors and systems with application in rehabilitation. J. NeuroEng. Rehabilit. 2012, 9, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Hung, K.; Zhang, Y.T.; Tai, B. Wearable medical devices for tele-home healthcare. Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. 2004, 4, 5384–5387. [Google Scholar]
- Anliker, U.; Ward, J.A.; Lukowicz, P.; Troster, G.; Dolveck, F.; Baer, M.; Keita, F.; Schenker, E.B.; Catarsi, F.; Coluccini, L.; et al. AMON: A wearable multiparameter medical monitoring and alert system. IEEE Trans. Inf. Technol. Biomed. 2004, 8, 415–427. [Google Scholar] [CrossRef] [PubMed]
- Khan, Y.; Ostfeld, A.E.; Lochner, C.M.; Pierre, A.; Arias, A.C. Monitoring of Vital Signs with Flexible and Wearable Medical Devices. Adv. Mater. 2016, 28, 4373–4395. [Google Scholar] [CrossRef] [PubMed]
- Gray, N.A.; Selzman, C.H. Current status of the total artificial heart. Am. Heart J. 2006, 152, 4–10. [Google Scholar] [CrossRef] [PubMed]
- Cobelli, C.; Renard, E.; Kovatchev, B. Artificial pancreas: Past, present, future. Diabetes 2011, 60, 2672–2682. [Google Scholar] [CrossRef] [PubMed]
- Zwischenberger, J.B.; Anderson, C.M.; Cook, K.E.; Lick, S.D.; Mockros, L.F.; Bartlett, R.H. Development of an Implantable Artificial Lung: Challenges an Progress. ASAIO J. 2001, 47, 316–320. [Google Scholar] [CrossRef] [PubMed]
- McAdams, B.; Rizvi, A. An Overview of Insulin Pumps and Glucose Sensors for the Generalist. J. Clin. Med. 2016, 5, 5. [Google Scholar] [CrossRef] [PubMed]
- Davenport, A.; Gura, V.; Ronco, C.; Beizai, M.; Ezon, C.; Rambod, E. A wearable haemodialysis device for patients with end-stage renal failure: A pilot study. Lancet 2007, 370, 2005–2010. [Google Scholar] [CrossRef]
- Frazier, O.H.; Dowling, R.D.; Gray, L.A.; Shah, N.A.; Pool, T.; Gregoric, I. The total artificial heart: Where we stand. Cardiology 2004, 101, 117–121. [Google Scholar] [CrossRef]
- Slaughter, M.S.; Myers, T.J. Transcutaneous energy transmission for mechanical circulatory support systems: History, current status, and future prospects. J. Card. Surg. 2010, 25, 484–489. [Google Scholar] [CrossRef] [PubMed]
- Salani, M.; Roy, S.; Fissell, W.H. Innovations in Wearable and Implantable Artificial Kidneys. Am. J. Kidney Dis. 2018, 72, 745–751. [Google Scholar] [CrossRef] [PubMed]
- To, N.; Sanada, I.; Ito, H.; Prihandana, G.S.; Morita, S.; Kanno, Y.; Miki, N. Water-Permeable Dialysis Membranes for Multi-Layered Microdialysis System. Front. Bioeng. Biotechnol. 2015, 3, 1–7. [Google Scholar] [CrossRef]
- Haveman, J.W.; Logtenberg, S.J.J.; Kleefstra, N.; Groenier, K.H.; Bilo, H.J.G.; Blomme, A.M. Surgical aspects and complications of continuous intraperitoneal insulin infusion with an implantable pump. Langenbeck’s Arch. Surg. 2010, 395, 65–71. [Google Scholar] [CrossRef]
- Torregrossa, G.; Morshuis, M.; Varghese, R.; Hosseinian, L.; Vida, V.; Tarzia, V.; Loforte, A.; Duveau, D.; Arabia, F.; Leprince, P.; et al. Results with syncardia total artificial heart beyond 1 year. ASAIO J. 2014, 60, 626–634. [Google Scholar] [CrossRef] [PubMed]
- Meng, E.; Sheybani, R. Insight: Implantable medical devices. Lab Chip 2014, 14, 3233–3240. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Kim, J.K.; Park, S.A.; Sim, D.S.; Jeong, M.H.; Lee, D.W. 3D-printed biodegradable polymeric stent integrated with a battery-less pressure sensor for biomedical applications. In Proceedings of the 2017 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; pp. 47–50. [Google Scholar]
- Cheong, J.H.; Ng, S.S.Y.; Liu, X.; Xue, R.F.; Lim, H.J.; Khannur, P.B.; Lee, A.A.; Kang, K.; Lim, L.S.; He, C.; et al. An inductively powered implantable blood flow sensor microsystem for vascular grafts. IEEE Trans. Biomed. Eng. 2012, 59, 2466–2475. [Google Scholar] [CrossRef] [PubMed]
- Inoue, N.; Onoe, H. Graphene-based inline pressure sensor integrated with microfluidic elastic tube. J. Micromech. Microeng. 2018, 28, 014001. [Google Scholar] [CrossRef]
- Zhang, Y.; Gui, Y.; Meng, F.; Li, L.; Gao, C.; Zhu, H.; Hao, Y. Graphene Water Transfer Printing for 3D Surface. In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; pp. 13–16. [Google Scholar]
- Wang, Y.; Wang, L.; Yang, T.; Li, X.; Zang, X.; Zhu, M.; Wang, K.; Wu, D.; Zhu, H. Wearable and highly sensitive graphene strain sensors for human motion monitoring. Adv. Funct. Mater. 2014, 24, 4666–4670. [Google Scholar] [CrossRef]
- Bird, J. ElectricalCircuit Theory and Technology; Routledge: Abingdon, UK, 2014. [Google Scholar]
- Yu, D.; Han, K.S. Self-Inductance of Air-Core Circular Coils with Rectangular Cross Section. IEEE Trans. Magn. 1987, 23, 3916–3921. [Google Scholar]
- Turba, U.C.; Uflacker, R.; Bozlar, U.; Hagspiel, K.D. Normal renal arterial anatomy assessed by multidetector CT angiography: Are there differences between men and women? Clin. Anat. 2009, 22, 236–242. [Google Scholar] [CrossRef] [PubMed]
- Marolf, A.P.; Hany, S.; Bättig, B.; Vetter, W. Comparison of casual, ambulatory and self-determined blood pressure measurement. Nephron 1987, 47, 142–145. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Cong, Y.; Li, J.; Li, X.; Li, B.; Qi, S. Comparison of Invasive Blood Pressure Measurements from the Caudal Ventral Artery and the Femoral Artery in Male Adult SD and Wistar Rats. PLoS ONE 2013, 8, e60625. [Google Scholar] [CrossRef] [PubMed]
- Basar, M.R.; Ahmad, M.Y.; Cho, J.; Ibrahim, F. An Improved Wearable Resonant Wireless Power Transfer System for Biomedical Capsule Endoscope. IEEE Trans. Ind. Electron. 2018, 65, 7772–7781. [Google Scholar] [CrossRef]
- Wobma, H.; Vunjak-Novakovic, G. Tissue Engineering and Regenerative Medicine 2015: A Year in Review. Tissue Eng. Part B Rev. 2016, 22, 101–113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McCoy, R.J.; O’Brien, F.J. Influence of Shear Stress in Perfusion Bioreactor Cultures for the Development of Three-Dimensional Bone Tissue Constructs: A Review. Tissue Eng. Part B Rev. 2010, 16, 587–601. [Google Scholar] [CrossRef] [PubMed] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mold Design | Fabricated Tube | |
|---|---|---|
| Inner Diameter (I.D.) (mm) | 3.00 | 2.98 |
| Outer Diameter (O.D) (mm) | 4.00 | 3.96 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Inoue, N.; Koya, Y.; Miki, N.; Onoe, H. Graphene-Based Wireless Tube-Shaped Pressure Sensor for In Vivo Blood Pressure Monitoring. Micromachines 2019, 10, 139. https://doi.org/10.3390/mi10020139
Inoue N, Koya Y, Miki N, Onoe H. Graphene-Based Wireless Tube-Shaped Pressure Sensor for In Vivo Blood Pressure Monitoring. Micromachines. 2019; 10(2):139. https://doi.org/10.3390/mi10020139
Chicago/Turabian StyleInoue, Nagisa, Yoshihiko Koya, Norihisa Miki, and Hiroaki Onoe. 2019. "Graphene-Based Wireless Tube-Shaped Pressure Sensor for In Vivo Blood Pressure Monitoring" Micromachines 10, no. 2: 139. https://doi.org/10.3390/mi10020139