
Automatic Ship Detection in SAR Images Using Multi-Scale Heterogeneities and an A Contrario Decision



Abstract
:
1. Introduction
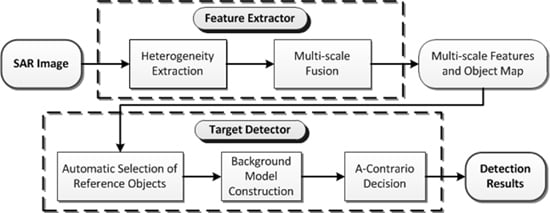
2. Our Algorithm
2.1. Heterogeneity Feature Extraction
2.1.1. Heterogeneity Feature
2.1.2. Multi-Scale Fusion
2.2. A Contrario Decision-Based Ship Target Detection
2.2.1. A Contrario Decision
- 0: the region Q matches with region B′ occasionally, but they are different actually.
- 1: indeed, the region Q matches with region B′, and they both describe one object.
2.2.2. Ship Detection Based on an A Contrario Decision
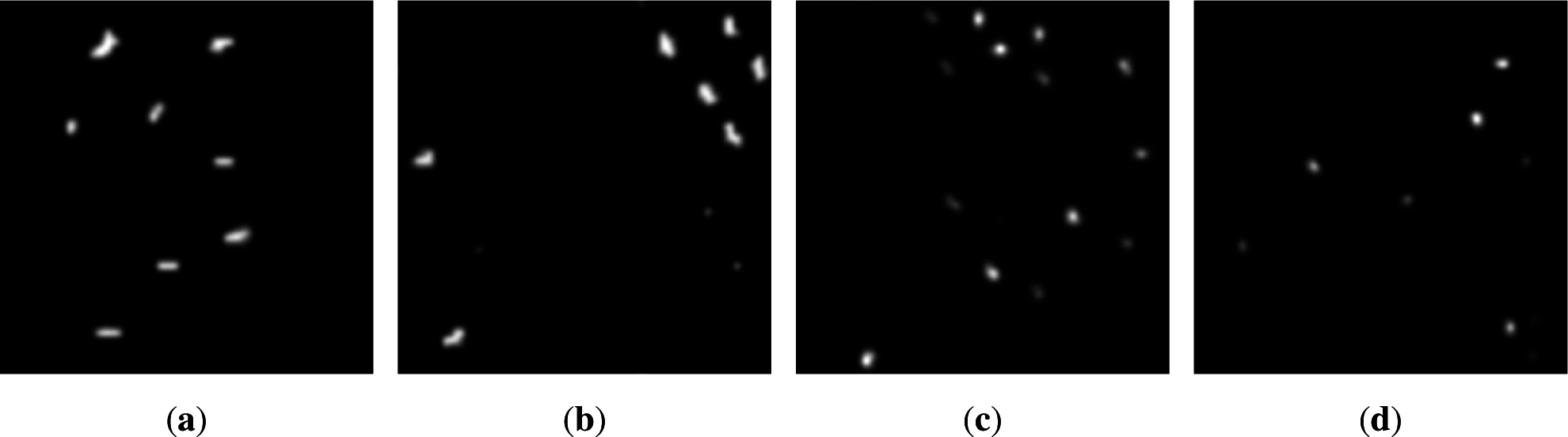
3. Experimental Results
3.1. Datasets and Experimental Settings
3.2. Results and Analysis
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Margarit, G.; Barba Milanés, J.A.; Tabasco, A. Operational ship monitoring system based on synthetic aperture radar processing. Remote Sens 2009, 1, 375–392. [Google Scholar]
- Hu, C.; Ferro-Famil, L.; Kuang, G. Ship discrimination using polarimetric SAR data and coherent time-frequency analysis. Remote Sens 2013, 5, 6899–6920. [Google Scholar]
- Finn, H.; Johnson, R. Adaptive detection mode with threshold control as a function of spatially sampled clutter-level estimates. RCA Rev 1968, 29, 414–464. [Google Scholar]
- Hansen, V. Constant false alarm rate processing in search radars. Proceedings of the Radar Present Future, London, UK, 23–25 October 1973; pp. 325–332.
- Hansen, V.; Sawyers, J. Detectability loss due to “greatest of” selection in a cell-averaging CFAR. IEEE Trans. Aerosp. Electron. Syst 1980, 16, 115–118. [Google Scholar]
- Rohling, H. Radar CFAR thresholding in clutter and multiple target situations. IEEE Trans. Aerosp. Electron. Syst 1983, 19, 608–621. [Google Scholar]
- Kuruoglu, E.; Zerubia, J. Modeling SAR images with a generalization of the Rayleigh distribution. IEEE Trans. Image Process 2004, 13, 527–533. [Google Scholar]
- Levanon, N.; Shor, M. Order statistics CFAR for Weibull background. IEEE Proc. F Radar Signal Process 1990, 137, 157–162. [Google Scholar]
- Kuttikkad, S.; Chellappa, R. Non-Gaussian CFAR techniques for target detection in high resolution SAR images. Proceedings of the IEEE International Conference on Image Processing, Austin, TX, USA, 13–16 November 1994; 1, pp. 910–914.
- Armstrong, B.; Griffiths, H. CFAR detection of fluctuating targets in spatially correlated K-distributed clutter. IEEE Proc. F Radar Signal Process 1991, 138, 139–152. [Google Scholar]
- Alberola-López, C.; Casar-Corredera, J.; de Miguel-Vela, G. Object CFAR detection in Gamma-distributed textured-background images. IEEE Proc. Vis. Image Signal Process 1999, 146, 130–136. [Google Scholar]
- Wang, C.; Liao, M.; Li, X. Ship detection in SAR image based on the alpha-stable distribution. Sensors 2008, 8, 4948–4960. [Google Scholar]
- Souyris, J.; Henry, C.; Adragna, F. On the use of complex SAR image spectral analysis for target detection: Assessment of polarimetry. IEEE Trans. Geosci. Remote Sens 2003, 41, 2725–2734. [Google Scholar]
- Ouchi, K.; Tamaki, S.; Yaguchi, H.; Iehara, M. Ship detection based on coherence images derived from cross correlation of multilook SAR images. IEEE Geosci. Remote Sens. Lett 2004, 1, 184–187. [Google Scholar]
- Tello, M.; López-Martínez, C.; Mallorqui, J. A novel algorithm for ship detection in SAR imagery based on the wavelet transform. IEEE Geosci. Remote Sens. Lett 2005, 2, 201–205. [Google Scholar]
- Kaplan, L. Improved SAR target detection via extended fractal features. IEEE Trans. Aerosp. Electron. Syst 2001, 37, 436–451. [Google Scholar]
- Howard, D.; Roberts, S.; Brankin, R. Target detection in SAR imagery by genetic programming. Adv. Eng. Softw 1999, 30, 303–311. [Google Scholar]
- Bhanu, B.; Lin, Y. Genetic algorithm based feature selection for target detection in SAR images. Image Vis. Comput 2003, 21, 591–608. [Google Scholar]
- Huang, X.; Huang, P.; Dong, L.; Song, H.; Yang, W. Saliency detection based on distance between patches in polarimetric SAR images. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 4572–4575.
- Huang, X.; Yang, W.; Yin, X.; Song, H. Saliency detection in SAR images. Proceedings of the European Conference on Synthetic Aperture Radar (EUSAR), Berlin, Germany, 3–5 June 2014; pp. 1–4.
- Musé, P.; Sur, F.; Cao, F.; Gousseau, Y.; Morel, J. An a contrario decision method for shape element recognition. Int. J. Comput. Vis 2006, 69, 295–315. [Google Scholar]
- Veit, T.; Cao, F.; Bouthemy, P. An a contrario decision framework for region-based motion detection. Int. J. Comput. Vis 2006, 68, 163–178. [Google Scholar]
- Aiazzi, B.; Baronti, S.; Alparone, L.; Cuozzo, G.; D’Elia, C.; Schirinzi, G. SAR image segmentation through information-theoretic heterogeneity features and tree-structured Markov random fields. IEEE Int. Geosci. Remote Sens. Symp 2005, 4, 2803–2806. [Google Scholar]
- Lopes, A.; Touzi, R.; Nezry, E. Adaptive speckle filters and scene heterogeneity. IEEE Trans. Geosci. Remote Sens 1990, 28, 992–1000. [Google Scholar]
- Aiazzi, B.; Alparone, L.; Baronti, S. Information-theoretic heterogeneity measurement for SAR imagery. IEEE Trans. Geosci. Remote Sens 2005, 43, 619–624. [Google Scholar]
- Inglada, J.; Mercier, G. A new statistical similarity measure for change detection in multitemporal SAR images and its extension to multiscale change analysis. IEEE Trans. Geosci. Remote Sens 2007, 45, 1432–1445. [Google Scholar]
- Xia, G.; Liu, G.; Yang, W. Meaningful Objects segmentation from SAR Images via A Multi-Scale Non-Local Active Contour Model. 2015. arxiv:1501.04163. arXiv.org e-Print archive Available online: http://arxiv.org/abs/1501.04163 accessed on 26 May 2015.
- Myaskouvskey, A.; Gousseau, Y.; Lindenbaum, M. Beyond independence: An extension of the a contrario decision procedure. Int. J. Comput. Vis 2013, 101, 22–44. [Google Scholar]
- Robin, A.; Moisan, L.; Hegarat-Mascle, L. An a contrario approach for subpixel change detection in satellite imagery. IEEE Trans. Pattern Anal. Mach. Intell 2010, 32, 1977–1993. [Google Scholar]
- Xia, G.; Delon, J.; Gousseau, Y. Accurate junction detection and characterization in natural images. Int. J. Comput. Vis 2014, 106, 31–35. [Google Scholar]
- Cao, F.; Lisani, J.L.; Morel, J.M.; Muse, P.; Frederic, S. A contrario decision: The LLD method. In A Theory of Shape Identification; Springer: Berlin/Heidelberg, Germany, 2008; Volume 1948, pp. 81–92. [Google Scholar]
- Moser, G.; Serpico, S. Generalized minimum-error thresholding for unsupervised change detection from SAR amplitude imagery. IEEE Trans. Geosci. Remote Sens 2006, 44, 2972–2982. [Google Scholar]
- Cheng, J.; Gao, G.; Ding, W.; Ku, X.; Sun, J. An improved scheme for parameter estimation of G′ distribution model in high-resolution SAR images. Prog. Electromagn. Res 2013, 134, 23–46. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Performance | |||||
|---|---|---|---|---|---|---|
| Image Figure 2a | Ntt | Nfp | Nfn | Pd | Pq | |
| Nakagami-CFAR | 8 | 3 | 0 | 100% | 72.73% | |
| Weibull-CFAR | 8 | 3 | 0 | 100% | 72.73% | |
| G′-CFAR | 8 | 0 | 0 | 100% | 100% | |
| The proposed approach | 8 | 0 | 0 | 100% | 100% | |
| Image Figure 2b | Ntt | Nfp | Nfn | Pd | Pq | |
| Nakagami-CFAR | 9 | 3 | 0 | 100% | 75.00% | |
| Weibull-CFAR | 9 | 6 | 0 | 100% | 60.00% | |
| G′-CFAR | 8 | 0 | 1 | 88.89% | 88.89% | |
| The proposed approach | 9 | 0 | 0 | 100% | 100% | |
| Image Figure 2c | Ntt | Nfp | Nfn | Pd | Pq | |
| Nakagami-CFAR | 12 | 22 | 2 | 85.71% | 33.33% | |
| Weibull-CFAR | 12 | 2 | 2 | 85.71% | 75.00% | |
| G′-CFAR | 12 | 0 | 2 | 85.71% | 85.71% | |
| The proposed approach | 14 | 0 | 0 | 100% | 100% | |
| Image Figure 2d | Ntt | Nfp | Nfn | Pd | Pq | |
| Nakagami-CFAR | 8 | 21 | 0 | 97.43% | 27.59% | |
| Weibull-CFAR | 7 | 1 | 1 | 94.87% | 77.78% | |
| G′-CFAR | 6 | 0 | 2 | 75.00% | 75.00% | |
| The proposed approach | 8 | 0 | 0 | 100% | 100% | |
| Algorithm | Performance | |||||
|---|---|---|---|---|---|---|
| Image Figure 2e | Ntt | Nfp | Nfn | Pd | Pq | |
| Nakagami-CFAR | 9 | 14 | 0 | 100% | 29.13% | |
| Weibull-CFAR | 9 | 5 | 0 | 100% | 64.29% | |
| G′-CFAR | 9 | 5 | 0 | 100% | 64.29% | |
| The proposed approach | 9 | 0 | 0 | 100% | 100% | |
| Image Figure 2f | Ntt | Nfp | Nfn | Pd | Pq | |
| Nakagami-CFAR | 22 | 2 | 6 | 78.57% | 73.33% | |
| Weibull-CFAR | 22 | 3 | 6 | 78.57% | 70.97% | |
| G′-CFAR | 23 | 2 | 5 | 82.14% | 76.67% | |
| The proposed approach | 25 | 0 | 3 | 89.29% | 89.29% | |
| Image Figure 2g | Ntt | Nfp | Nfn | Pd | Pq | |
| Nakagami-CFAR | 32 | 3 | 1 | 96.97% | 88.89% | |
| Weibull-CFAR | 30 | 3 | 3 | 90.91% | 83.33% | |
| G′-CFAR | 32 | 3 | 1 | 96.97% | 88.89% | |
| The proposed approach | 32 | 1 | 1 | 96.97% | 94.12% | |
| Image Figure 2h | Ntt | Nfp | Nfn | Pd | Pq | |
| Nakagami-CFAR | 31 | 4 | 5 | 86.11% | 77.50% | |
| Weibull-CFAR | 33 | 8 | 3 | 91.67% | 75.00% | |
| G′-CFAR | 33 | 9 | 3 | 91.67% | 73.33% | |
| The proposed approach | 33 | 0 | 3 | 91.67% | 91.67% | |
© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Yang, W.; Zhang, H.; Xia, G.-S. Automatic Ship Detection in SAR Images Using Multi-Scale Heterogeneities and an A Contrario Decision. Remote Sens. 2015, 7, 7695-7711. https://doi.org/10.3390/rs70607695
Huang X, Yang W, Zhang H, Xia G-S. Automatic Ship Detection in SAR Images Using Multi-Scale Heterogeneities and an A Contrario Decision. Remote Sensing. 2015; 7(6):7695-7711. https://doi.org/10.3390/rs70607695
Chicago/Turabian StyleHuang, Xiaojing, Wen Yang, Haijian Zhang, and Gui-Song Xia. 2015. "Automatic Ship Detection in SAR Images Using Multi-Scale Heterogeneities and an A Contrario Decision" Remote Sensing 7, no. 6: 7695-7711. https://doi.org/10.3390/rs70607695