From TLS to VLS: Biomass Estimation at Individual Tree Level

Abstract
:1. Introduction
2. Data Collection
2.1. Sensei VLS System and Leica HDS6000 TLS System

2.2. TLS-Biomass Data Acquired in Laboratory
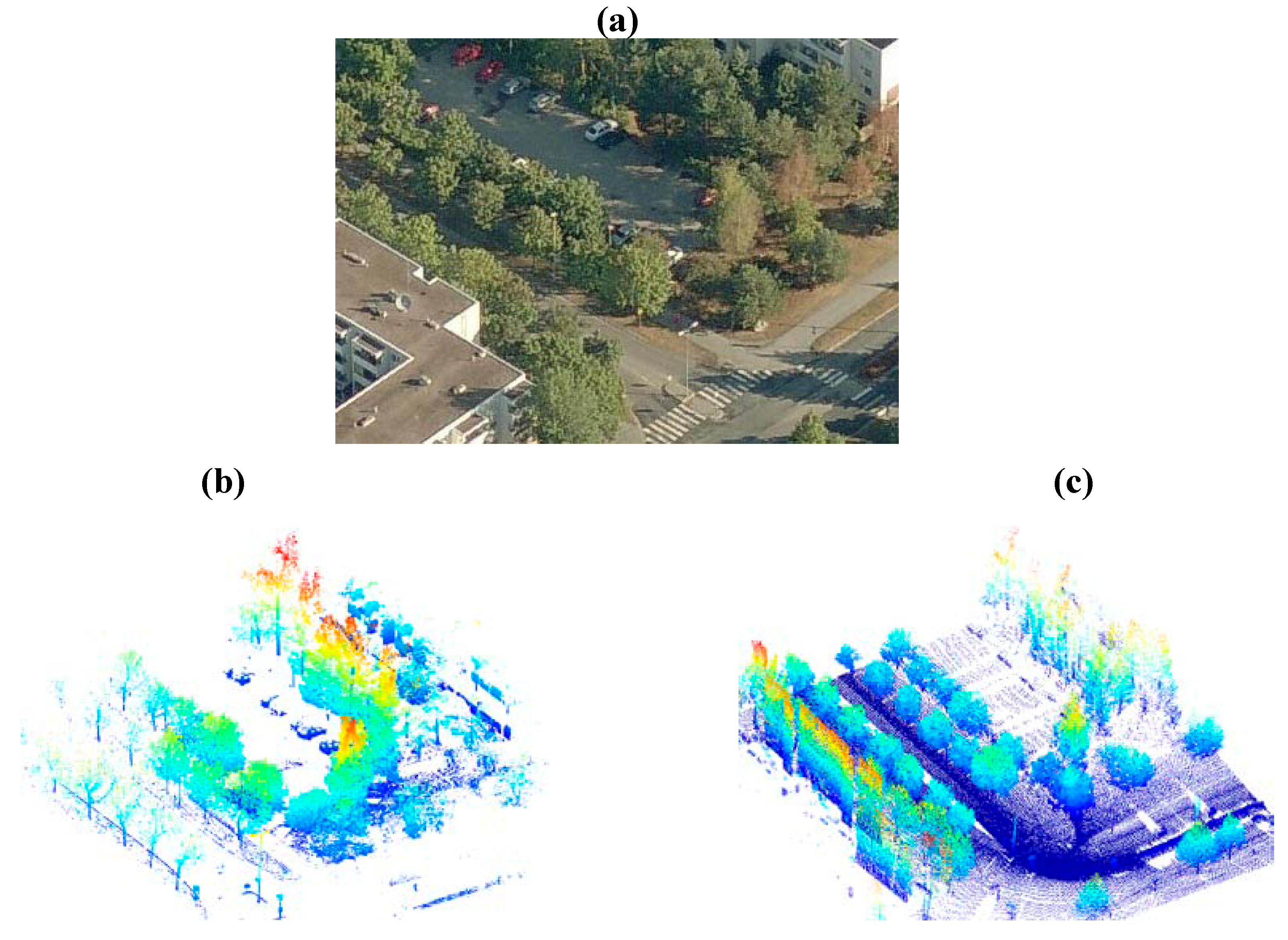
2.3. VLS-TLS Data Collected in the Study Site

3. Methods
3.1. Geo-referencing
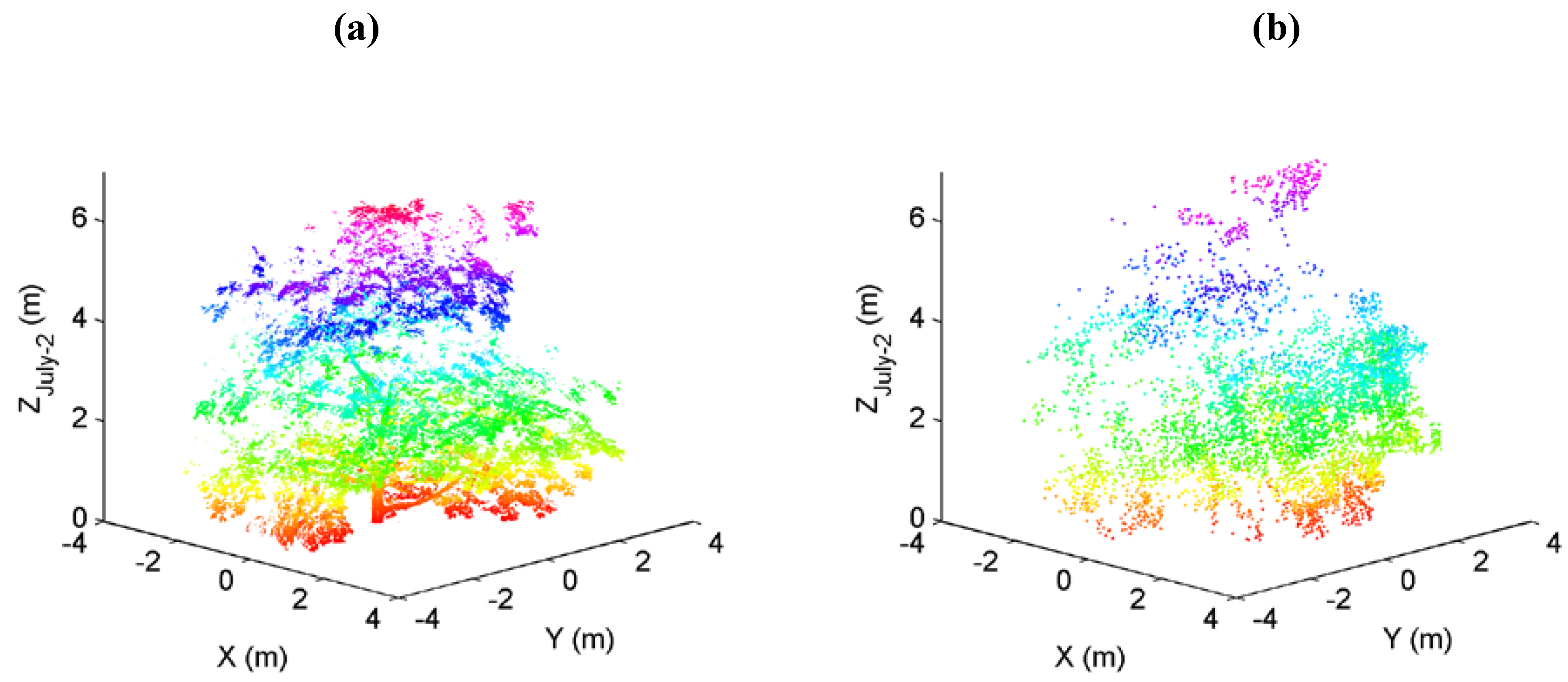
3.2. Crown Segmentation
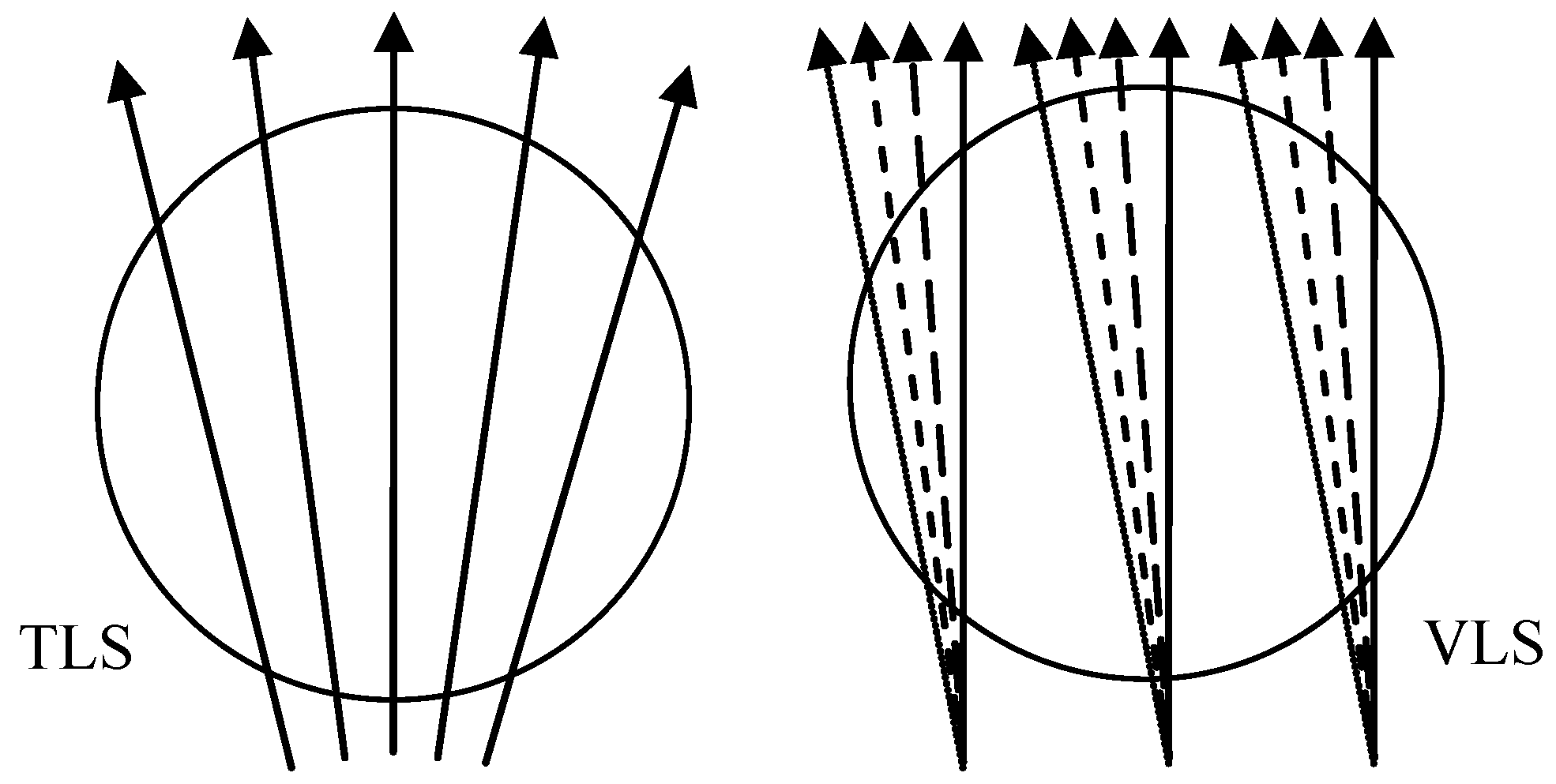
3.3. Scanning Model Analysis

3.4. Serial Retrieval Model
4. Results
4.1. Crown Segmentation

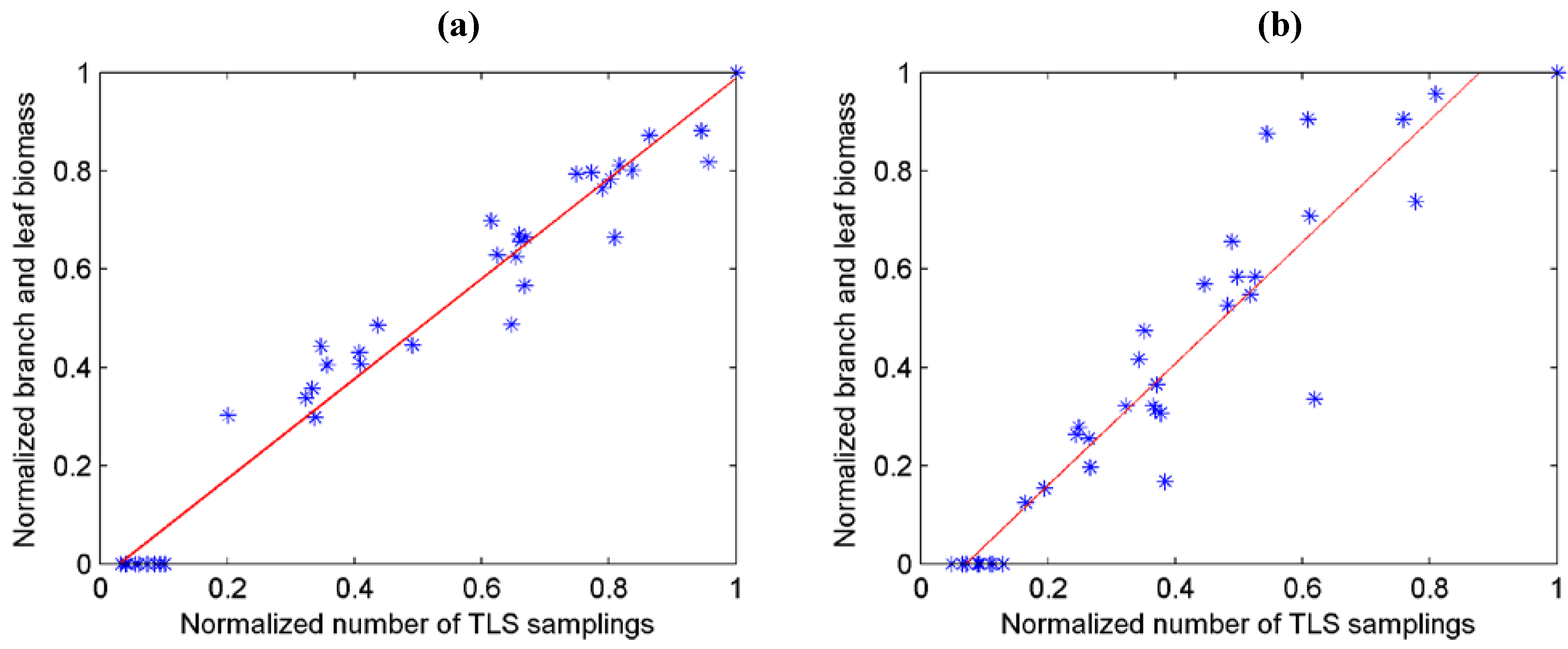
4.2. TLS-Biomass Correlation

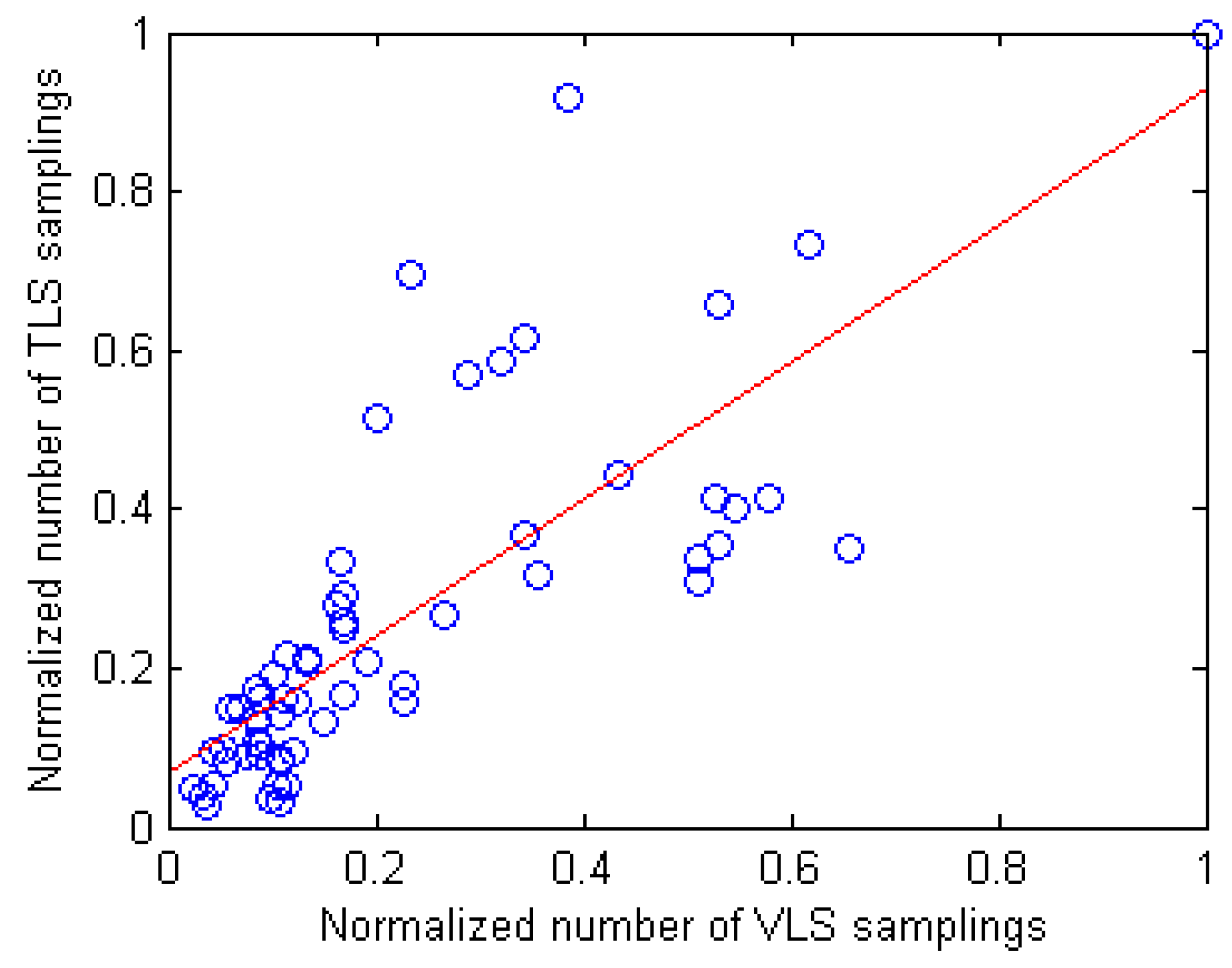
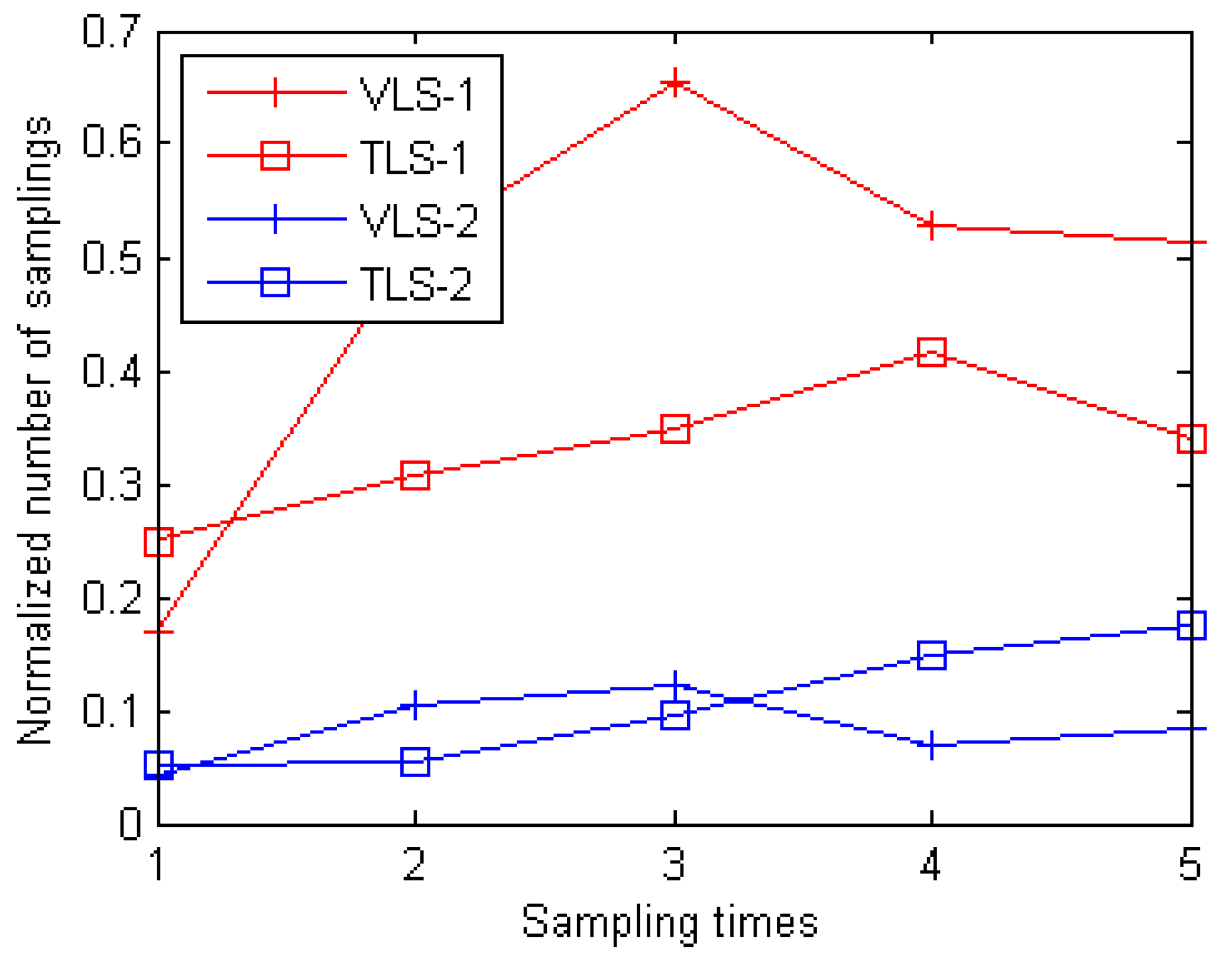
4.3. VLS-TLS Correlation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
5. Discussions and Conclusion

Acknowledgements
References and Notes
- Cihlar, J. Quantification of the regional carbon cycle of the biosphere: policy, science and land-use decisions. J. Environ. Manag. 2007, 85, 785–790. [Google Scholar] [CrossRef] [PubMed]
- Houghton, R.A. Aboveground forest biomass and the global carbon balance. Glob. Chang. Biol. 2005, 11, 945–958. [Google Scholar] [CrossRef]
- Houghton, R.A.; Hall, F.; Goetz, S.J. Importance of biomass in the global carbon cycle. J. Geophys. Res. 2009, 114, G00E03. [Google Scholar] [CrossRef]
- Hese, S.; Lucht, W.; Schmullius, C.; Barnsley, M.; Dubayah, R.; Knorr, D.; Neumann, K.; Riedel, T.; Schröter, K. Global biomass mapping for an improved understanding of the CO2 balance—The Earth observation mission carbon-3D. Remote Sens. Environ. 2005, 94, 94–104. [Google Scholar] [CrossRef]
- Holopainen, M.; Tuominen, S.; Karjalainen, M.; Hyyppä, J.; Vastaranta, M.; Hyyppä, H. The accuracy of high-resolution radar images in the estimation of plot-level forest variables. In Advances in GIScience; Lecture Notes in Geoinformation and Cartography; Springer: Berlin Heidelberg, Germany, 2009; pp. 67–82. [Google Scholar]
- Anaya, J.A.; Chuvieco, E.; Palacios-Orueta, A. Aboveground biomass assessment in Colombia: A remote sensing approach. Forest Ecol. Manag. 2009, 257, 1237–1246. [Google Scholar] [CrossRef]
- Zheng, D.; Rademacher, J.; Chen, J.; Crow, T.; Bresee, M.; Le Moine, J.; Ryu, S.R. Estimating aboveground biomass using Landsat 7 ETM + data across a managed landscape in northern Wisconsin, USA. Remote Sens. Environ. 2004, 93, 402–411. [Google Scholar] [CrossRef]
- Wessels, K.J.; Prince, S.D.; Zambatis, N.; Macfadyen, S.; Frost, P.E.; Van Zyl, D. Relationship between herbaceous biomass and 1-km2 advanced very high resolution radiometer (AVHRR) NDVI in Kruger National Park, South Africa. Int. J. Remote Sens. 2006, 27, 951–973. [Google Scholar] [CrossRef]
- Suganuma, H.; Abe, Y.; Taniguchi, M.; Tanouchi, H.; Utsugi, H.; Kojima, T.; Yamada, K. Stand biomass estimation method by canopy coverage for application to remote sensing in an arid area of Western Australia. Forest Ecol. Manag. 2006, 222, 75–87. [Google Scholar] [CrossRef]
- Hansen, M.C.; DeFries, R.S.; Towndsend, J.R.G.; Carroll, M.; Dimiceli, C.; Sohlberg, R. Global percent tree cover at a spatial resolution of 500 meters: First results of the MODIS vegetation continuous algorithm. Earth Interactions 2003, 7, 1–15. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. LiDAR remote sensing for ecosystem studies. Bioscience 2002, 52, 19–30. [Google Scholar] [CrossRef]
- Holopainen, M.; Haapanen, R.; Karjalainen, M.; Vastaranta, M.; Hyyppä, J.; Yu, X.; Tuominen, S.; Hyyppä, H. Combination of low-pulse ALS data and TerraSAR-X radar images in the estimation of plot-level forest variables. In Proceedings of Laserscanning09, Paris, France, 2009; In The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2009; Volume 38, Part 3/W8. pp. 135–140. [Google Scholar]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Hyyppä, J.; Inkinen, M. Detecting and estimating attributes for single trees using laser scanner. The Photogramm. J. Fin. 1999, 16, 27–42. [Google Scholar]
- Solberg, S.; Næsset, E.; Hanssen, K.H.; Christiansen, E. Mapping defoliation during a severe insect attack on Scots pine using airborne laser scanning. Remote Sens. Environ. 2006, 102, 364–376. [Google Scholar] [CrossRef]
- Zhao, K.; Popescu, S.; Nelson, R. Lidar remote sensing of forest biomass: A scale-invariant estimation approach using airborne lasers. Remote Sens. Environ. 2009, 113, 182–196. [Google Scholar] [CrossRef]
- Hawbaker, T.J.; Keuler, N.S.; Lesak, A.A.; Gobakken, T.; Contrucci, K.; Radeloff, V.C. Improved estimates of forest vegetation structure and biomass with a LiDAR-optimized sampling design. J. Geophys. Res. 2009, 114, G00E04. [Google Scholar] [CrossRef]
- St-Onge, B.; Hu, Y.; Vega, C. Mapping the height and above-ground biomass of a mixed forest using lidar and stereo Ikonos images. Int. J. Remote Sens. 2008, 29, 1277–1294. [Google Scholar] [CrossRef]
- Lucas, R.M.; Lee, A.C.; Bunting, P.J. Retrieving forest biomass through integration of CASI and LiDAR data. Int. J. Remote Sens. 2008, 29, 1553–1577. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.H. Estimating plot-level tree heights with LIDAR: Local filtering with a canopy-height based variable window size. Comput. Electron. Agr. 2002, 37, 71–95. [Google Scholar] [CrossRef]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating individual trees in a Savanna woodland using small footprint liDAR data. Photogramm. Eng. Remote Sensing 2006, 72, 923–932. [Google Scholar] [CrossRef]
- Næsset, E. Practical large-scale forest stand inventory using a small footprint airborne scanning laser. Scand. J. Forest Res. 2004, 19, 164–179. [Google Scholar] [CrossRef]
- Andersen, H.E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using lidar data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Mutlu, M.; Popescu, S.C.; Stripling, C.; Spencer, T. Assessing surface fuel models using lidar andmultispectral data fusion. Remote Sens. Environ. 2008, 112, 274–285. [Google Scholar] [CrossRef]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenerg. 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Hosoi, F.; Omasa, K. Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning Lidar. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3610–3618. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Krooks, A.; Kukko, A.; Kaartinen, H. Radiometric calibration of terrestrial laser scanners with external reference targets. Remote Sens. 2009, 1, 144–158. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.B.; Culvenor, D.S.; Coops, N.C. Using airborne and ground-based ranging lidar to measure canopy structure in Australian forests. Can. J. Remote Sens. 2003, 29, 607–622. [Google Scholar] [CrossRef]
- Jupp, D.L.B.; Culvenor, D.S.; Lovell, J.L.; Newnham, G.J.; Strahler, A.H.; Woodcock, C.E. Estimating forest LAI profiles and structural parameters using a ground based laser called “Echidna”. Tree Physiol. 2008, 29, 171–181. [Google Scholar] [CrossRef] [PubMed]
- Radtke, P.J.; Bolstad, P.V. Laser point-quadrat sampling for estimating foliage-height profiles in broad-leaved forests. Can. J. Forest Res. 2001, 31, 410–418. [Google Scholar] [CrossRef]
- Maltamo, M.; Eerikäinen, K.; Pitkänen, J.; Hyyppä, J.; Vehmas, M. Estimation of timber volume and stem density based on scanning laser altimetry and expected tree size distribution functions. Remote Sens. Environ. 2004, 90, 319–330. [Google Scholar] [CrossRef]
- Omasa, K.; Urano, Y.; Oguma, H.; Fujinuma, Y. Mapping of tree position of Larix leptolepis woods and estimation of diameter at breast height (DBH) and biomass of the trees using range data measured by a portable scanning lidar. J. Remote Sens. Soc. Jpn. 2002, 22, 550–557. [Google Scholar]
- Hunter, G.; Cox, C.; Kremer, J. Development of a Commercial laser scanning mobile mapping system-StreetMapper. In Proceedings of Second International Workshop on the Future of Remote Sensing, Antwerp, Belgium, October 2006.
- Kukko, A.; Andrei, C.O.; Salminen, V.M.; Kaartinen, H.; Chen, Y.; Rönnholm, P.; Hyppä, H.; Hyyppä, J.; Chen, R.; Haggren, H.; Kosonen, I.; Capek, K. Road environment mapping system of the Finnish Geodetic Institute-FGI ROAMER. In Proceedings of the ISPRS Workshop ‘Laser Scanning 2007 and SilviLaser 2007’, Espoo, Finland, 2007; In The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2007; Volume XXXVI, Part 3/W52. pp. 241–247. [Google Scholar]
- Zampa, F.; Conforti, D. Mapping with mobile Lidar. GIM Int. 2009, 23, 35–37. [Google Scholar]
- Ussyshkin, V. Mobile laser scanning technology for surveying applications: From data collection to end-products. In FIG Working Week 2009: Surveyors Key Role in Accelerated Development; Eilat, Israel, May 2009. [Google Scholar]
- Tao, C.V. Mobile mapping technology for road network data acquisition. J. Geospatial Eng. 2000, 2, 1–13. [Google Scholar]
- Zhao, H.; Shibasaki, R. A vehicle-borne urban 3-D acquisition system using single-row laser range scanners. IEEE Trans. Syst. Man Cybern. B 2003, 33, 658–666. [Google Scholar] [CrossRef] [PubMed]
- Früh, C.; Jain, S.; Zakhor, A. Data processing algorithms for generating textured 3D building façade meshes from laser scans and camera images. Int. J. Comput. Vis. 2005, 61, 159–184. [Google Scholar] [CrossRef]
- Goulette, F.; Nashashibi, F.; Abuhadrous, I.; Ammoun, S.; Laurgeau, C. An integrated on-board laser range sensing system for on-the-way city and road modelling. In Proceedings of the ISPRS Commission I Symposium “From Sensors to Imagery”, Paris, France, July 2006.
- Yu, S.J.; Sukumar, S.R.; Koschan, A.F.; Page, D.L.; Abidi, M.A. 3D reconstruction of road surfaces using an integrated multi-sensory approach. Opt. Lasers Eng. 2007, 45, 808–818. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Hyyppä, H.; Kukko, A. Retrieval algorithms for road surface modelling using Laser-based mobile mapping. Sensors 2008, 8, 5238–5249. [Google Scholar] [CrossRef]
- Hernandez, J.; Marcotegui, B. Filtering of artifacts and pavement segmentation from mobile lidar data. In Laser scanning 2009 IAPRS, Paris, France, September 2009; In The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences; ISPRS: Vienna, Austria, 2009; Volume XXXVIII, Part 3/W8; pp. 329–333. [Google Scholar]
- Anon. TerraScan User’s Guide; Terrasolid, Helsinki, Finland, 2004. Available online: http://terrasolid.fi (accessed on 28 June 2010).
- Lin, Y.; Hyyppä, J.; Jaakkola, A.; Yu, X. Three-level frame and RD-schematic algorithm for automatic recognition of individual trees from VLS point clouds. Int. J. Remote Sens. 2010, Submitted. [Google Scholar]
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an Open Access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Lin, Y.; Jaakkola, A.; Hyyppä, J.; Kaartinen, H. From TLS to VLS: Biomass Estimation at Individual Tree Level. Remote Sens. 2010, 2, 1864-1879. https://doi.org/10.3390/rs2081864
Lin Y, Jaakkola A, Hyyppä J, Kaartinen H. From TLS to VLS: Biomass Estimation at Individual Tree Level. Remote Sensing. 2010; 2(8):1864-1879. https://doi.org/10.3390/rs2081864
Chicago/Turabian StyleLin, Yi, Anttoni Jaakkola, Juha Hyyppä, and Harri Kaartinen. 2010. "From TLS to VLS: Biomass Estimation at Individual Tree Level" Remote Sensing 2, no. 8: 1864-1879. https://doi.org/10.3390/rs2081864