

Ocean Satellite Data Fusion for High-Resolution Surface Current Maps

Abstract
:1. Introduction
2. Data and Methods
2.1. Real Satellite Data
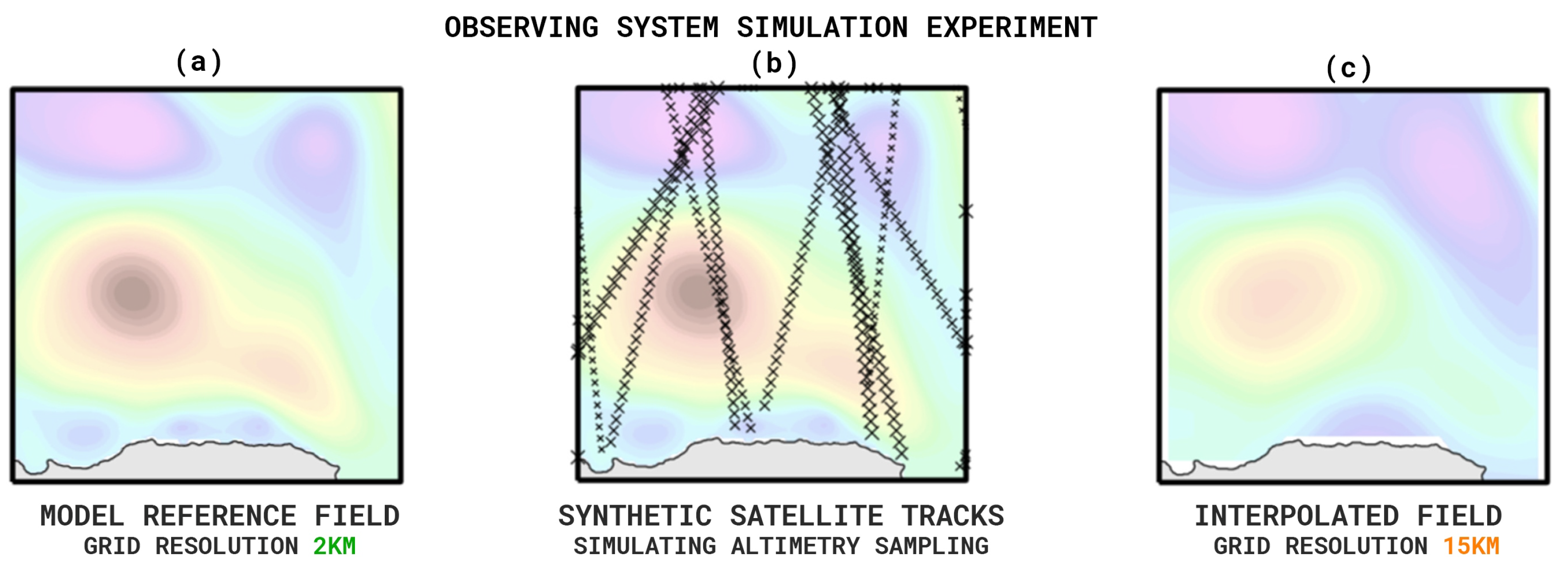
2.2. Simulated Satellite Data
2.3. Drifter Data
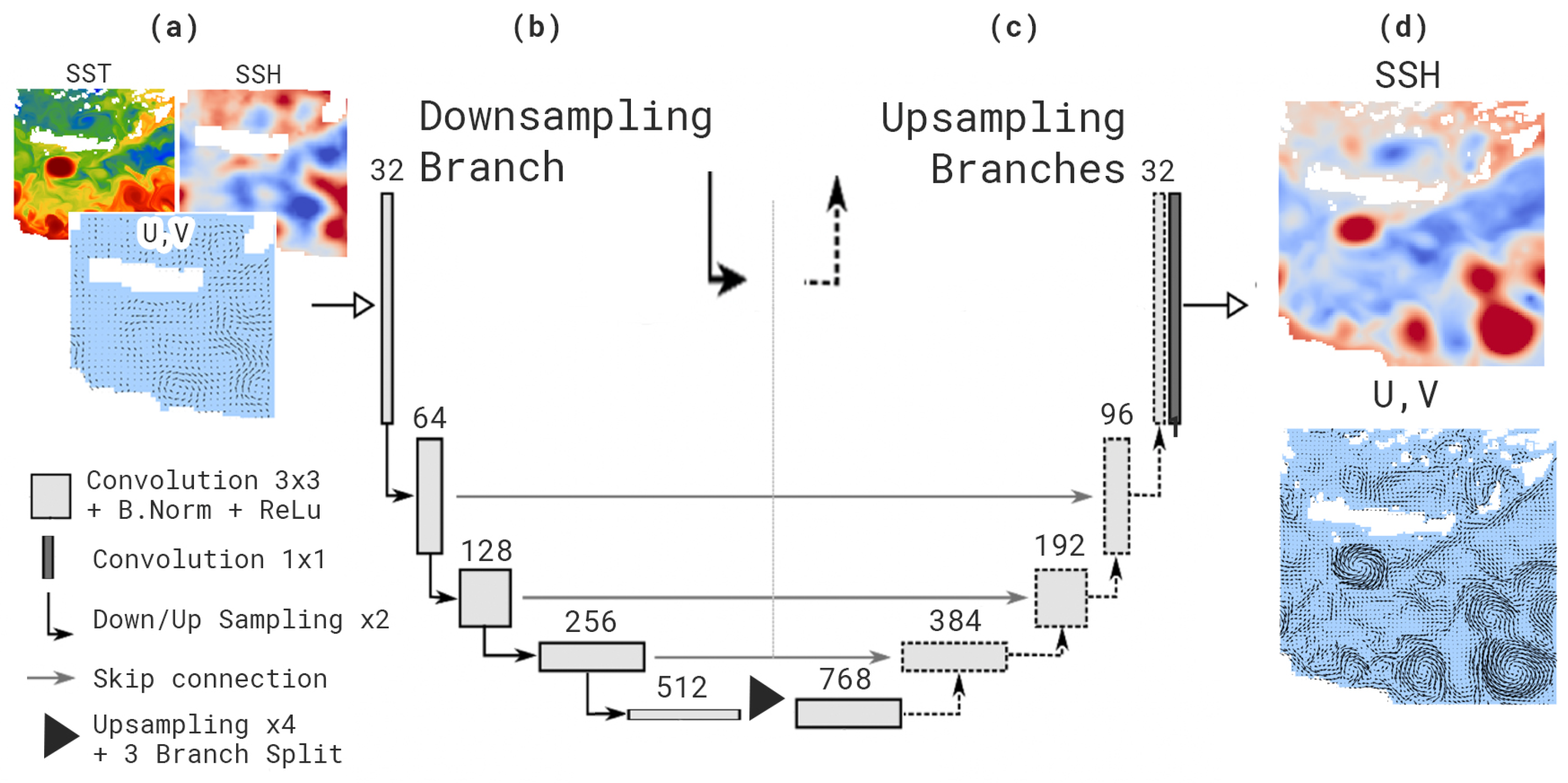
2.4. Model Architecture
2.5. Training with Artificial Clouds
2.6. Fine-Tuning on Real Observations
2.7. Evaluation Metrics
2.8. Comparison to Baselines
2.9. Implementation Details
3. Results
3.1. Training on Simulated Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Correct Angles, % | Correct Magnitudes, % |
|---|---|---|
| Mercator | 50.26 | 32.56 |
| AVISO/DUACS | 67.86 | 38.57 |
| HIRES-CUR | 71.73 | 45.73 |
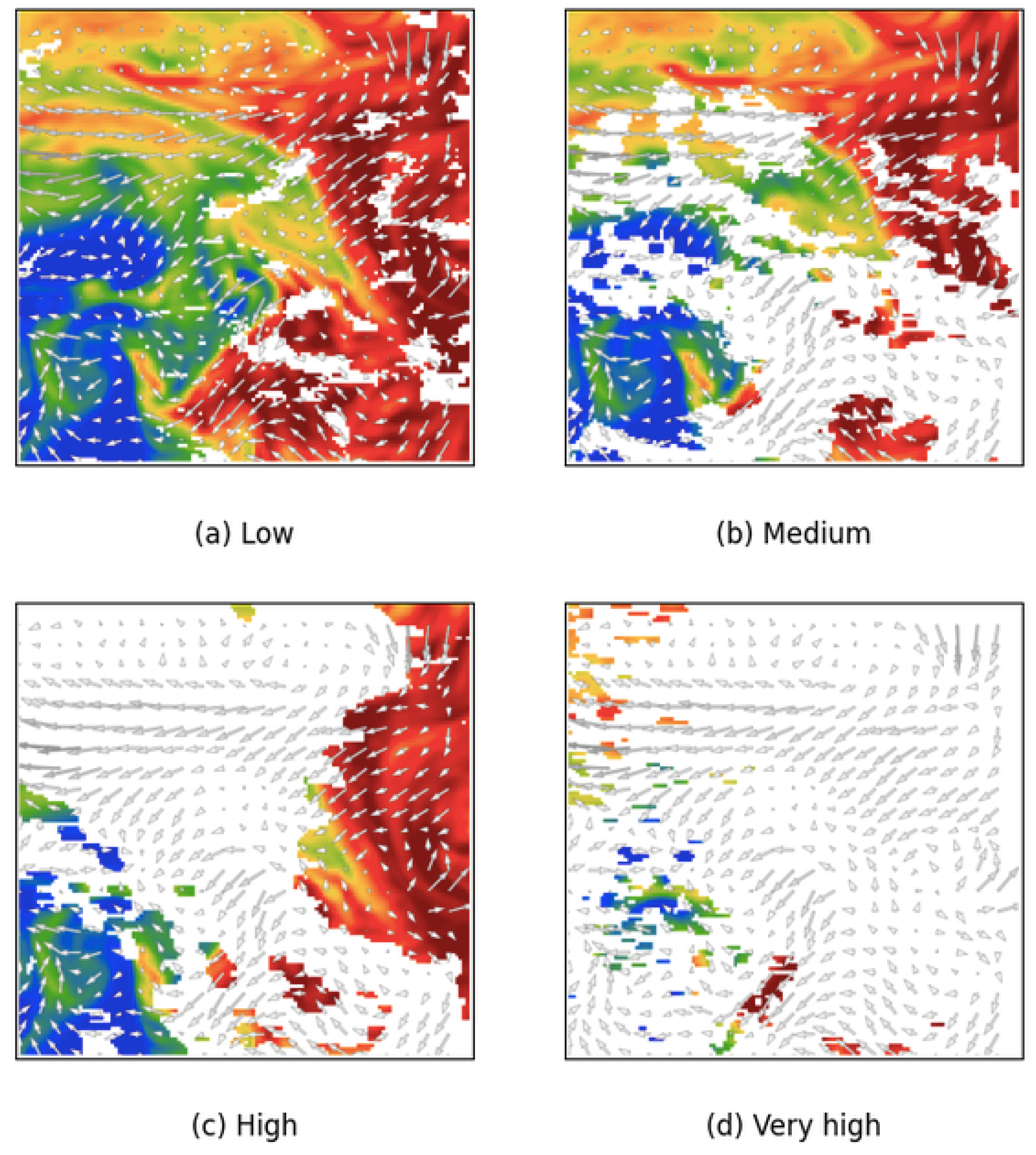
3.2. Cloud Robustness
3.3. Training on Real Data
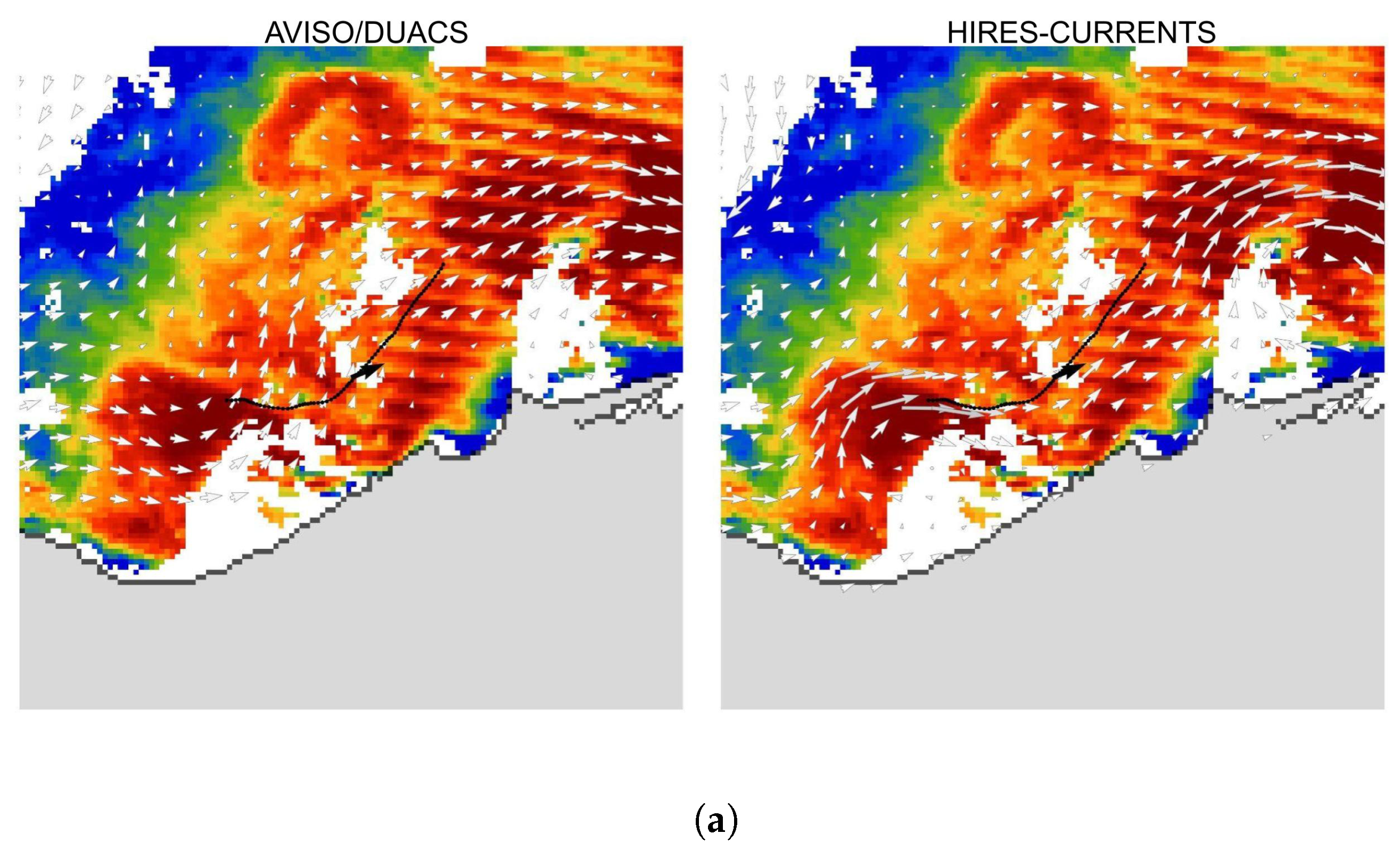
3.4. Qualitative Results
3.5. Further Ablations and Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fu, L.; Cazenave, A. Satellite Altimetry and Earth Sciences: A Handbook of Techniques and Applications; International Geophysics Series; Academic Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Morrow, R.; Fu, L.L.; Ardhuin, F.; Benkiran, M.; Chapron, B.; Cosme, E.; d’Ovidio, F.; Farrar, J.T.; Gille, S.T.; Lapeyre, G.; et al. Global Observations of Fine-Scale Ocean Surface Topography With the Surface Water and Ocean Topography (SWOT) Mission. Front. Mar. Sci. 2019, 6, 232. [Google Scholar] [CrossRef]
- Amores, A.; Jordà, G.; Arsouze, T.; Le Sommer, J. Up to What Extent Can We Characterize Ocean Eddies Using Present-Day Gridded Altimetric Products? J. Geophys. Res. Ocean. 2018, 123, 7220–7236. [Google Scholar] [CrossRef]
- Stegner, A.; Le Vu, B.; Dumas, F.; Ghannami, M.A.; Nicolle, A.; Durand, C.; Faugere, Y. Cyclone-Anticyclone Asymmetry of Eddy Detection on Gridded Altimetry Product in the Mediterranean Sea. J. Geophys. Res. Ocean. 2021, 126, e2021JC017475. [Google Scholar] [CrossRef]
- Ioannou, A.; Moschos, E.; Le Vu, B.; Stegner, A. Short-Term Optimal Ship Routing via Reliable Satellite Current Data. In Proceedings of the NAME International Symposium on Ship Operations, Management and Economics, Athens, Greece, 7–8 March 2023. [Google Scholar] [CrossRef]
- Dong, C.; Xu, G.; Han, G.; Bethel, B.J.; Xie, W.; Zhou, S. Recent Developments in Artificial Intelligence in Oceanography. Ocean-Land Res. 2022, 2022, 9870950. [Google Scholar] [CrossRef]
- Buongiorno Nardelli, B.; Cavaliere, D.; Charles, E.; Ciani, D. Super-Resolving Ocean Dynamics from Space with Computer Vision Algorithms. Remote Sens. 2022, 14, 1159. [Google Scholar] [CrossRef]
- Fablet, R.; Febvre, Q.; Chapron, B. Multimodal 4DVarNets for the reconstruction of sea surface dynamics from SST-SSH synergies. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4204214. [Google Scholar] [CrossRef]
- Sommer, J.; Chassignet, E.; Wallcraft, A. Ocean Circulation Modeling for Operational Oceanography: Current Status and Future Challenges. In New Frontiers in Operational Oceanography; Chassignet, E.P., Pascual, A., Tintore, J., Verron, J., Eds.; GODAE OceanView, 2018; pp. 289–308. [Google Scholar] [CrossRef]
- Drévillon, M.; Bourdallé-Badie, R.; Derval, C.; Lellouche, J.; Rémy, E.; Tranchant, B.; Benkiran, M.; Greiner, E.; Guinehut, S.; Verbrugge, N.; et al. The GODAE/Mercator-Ocean global ocean forecasting system: Results, applications and prospects. J. Oper. Oceanogr. 2008, 1, 51–57. [Google Scholar] [CrossRef]
- Lellouche, J.M.; Greiner, E.; Le Galloudec, O.; Garric, G.; Regnier, C.; Drevillon, M.; Benkiran, M.; Testut, C.E.; Bourdalle-Badie, R.; Gasparin, F.; et al. Recent updates to the Copernicus Marine Service global ocean monitoring and forecasting real-time 1/12∘ high-resolution system. Ocean Sci. 2018, 14, 1093–1126. [Google Scholar] [CrossRef]
- Jullien, S.; Caillaud, M.; Benshila, R.; Bordois, L.; Cambon, G.; Dumas, F.; Gentil, S.L.; Lemarié, F.; Marchesiello, P.; Theetten, S.; et al. CROCO Technical and Numerical Documentation. Zenodo 2022. Technical Note. [Google Scholar] [CrossRef]
- Brodeau, L.; Sommer, J.L.; Albert, A. Ocean-next/eNATL60: Material describing the set-up and the assessment of NEMO-eNATL60 simulations. Zenodo 2020. Technical Note. [Google Scholar] [CrossRef]
- Castillo, J.M.; Lewis, H.W.; Mishra, A.; Mitra, A.; Polton, J.; Brereton, A.; Saulter, A.; Arnold, A.; Berthou, S.; Clark, D.; et al. The Regional Coupled Suite (RCS-IND1): Application of a flexible regional coupled modelling framework to the Indian region at kilometre scale. Geosci. Model Dev. 2022, 15, 4193–4223. [Google Scholar] [CrossRef]
- Chelton, D.B.; Ries, J.C.; Haines, B.J.; Fu, L.L.; Callahan, P.S. Satellite altimetry. In International Geophysics; Elsevier: Amsterdam, The Netherlands, 2001; Volume 69, pp. i–ii. [Google Scholar]
- Nerem, R.S.; Chambers, D.P.; Choe, C.; Mitchum, G.T. Estimating mean sea level change from the TOPEX and Jason altimeter missions. Mar. Geod. 2010, 33, 435–446. [Google Scholar] [CrossRef]
- Abdalla, S.; Kolahchi, A.A.; Ablain, M.; Adusumilli, S.; Bhowmick, S.A.; Alou-Font, E.; Amarouche, L.; Andersen, O.B.; Antich, H.; Aouf, L.; et al. Altimetry for the future: Building on 25 years of progress. Adv. Space Res. 2021, 68, 319–363. [Google Scholar] [CrossRef]
- Evensen, G. Data Assimilation: The Ensemble Kalman Filter; Springer: Berlin/Heidelberg, Germany, 2009; Volume 2. [Google Scholar]
- Cressie, N. Statistics for Spatial Data; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Taburet, G.; Sanchez-Roman, A.; Ballarotta, M.; Pujol, M.I.; Legeais, J.F.; Fournier, F.; Faugere, Y.; Dibarboure, G. DUACS DT2018: 25 years of reprocessed sea level altimetry products. Ocean Sci. 2019, 15, 1207–1224. [Google Scholar] [CrossRef]
- Benkiran, M.; Ruggiero, G.; Greiner, E.; Le Traon, P.Y.; Rémy, E.; Lellouche, J.M.; Bourdallé-Badie, R.; Drillet, Y.; Tchonang, B. Assessing the impact of the assimilation of swot observations in a global high-resolution analysis and forecasting system part 1: Methods. Front. Mar. Sci. 2021, 8, 691955. [Google Scholar] [CrossRef]
- Biancamaria, S.; Lettenmaier, D.P.; Pavelsky, T.M. The SWOT mission and its capabilities for land hydrology. Remote Sens. Water Resour. 2016, 55, 117–147. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Li, Z.; Yang, W.; Peng, S.; Liu, F. A Survey of Convolutional Neural Networks: Analysis, Applications, and Prospects. arXiv 2020, arXiv:2004.02806. [Google Scholar] [CrossRef]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Image super-resolution using deep convolutional networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 295–307. [Google Scholar] [CrossRef]
- Yamanaka, J.; Kuwashima, S.; Kurita, T. Fast and accurate image super resolution by deep CNN with skip connection and network in network. In Proceedings of the Neural Information Processing: 24th International Conference—ICONIP 2017, Guangzhou, China, 14–18 November 2017; Proceedings, Part II 24. Springer: Berlin/Heidelberg, Germany, 2017; pp. 217–225. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; Proceedings, Part III 18P. Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Moschos, E.; Stegner, A.; Le Vu, B.; Schwander, O. Real-Time Validation of Operational Ocean Models Via Eddy-Decting Deep Neural Networks. In Proceedings of the IGARSS 2022–2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 8008–8011. [Google Scholar]
- Moschos, E.; Kugusheva, A.; Coste, P.; Stegner, A. Computer Vision for Ocean Eddy Detection in Infrared Imagery. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 2–7 January 2023; pp. 6395–6404. [Google Scholar]
- Zhao, N.; Huang, B.; Yang, J.; Radenkovic, M.; Chen, G. Oceanic Eddy Identification Using Pyramid Split Attention U-Net With Remote Sensing Imagery. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1500605. [Google Scholar] [CrossRef]
- Kim, S.M.; Shin, J.; Baek, S.; Ryu, J.H. U-Net convolutional neural network model for deep red tide learning using GOCI. J. Coast. Res. 2019, 90, 302–309. [Google Scholar] [CrossRef]
- Gao, L.; Li, X.; Kong, F.; Yu, R.; Guo, Y.; Ren, Y. AlgaeNet: A deep-learning framework to detect floating green algae from optical and SAR imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 2782–2796. [Google Scholar] [CrossRef]
- Radhakrishnan, K.; Scott, K.A.; Clausi, D.A. Sea ice concentration estimation: Using passive microwave and SAR data with a U-net and curriculum learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 5339–5351. [Google Scholar] [CrossRef]
- Ren, Y.; Li, X.; Yang, X.; Xu, H. Development of a dual-attention U-Net model for sea ice and open water classification on SAR images. IEEE Geosci. Remote Sens. Lett. 2021, 19, 4010205. [Google Scholar] [CrossRef]
- Saharia, C.; Ho, J.; Chan, W.; Salimans, T.; Fleet, D.J.; Norouzi, M. Image super-resolution via iterative refinement. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 4713–4726. [Google Scholar] [CrossRef]
- Ajayi, A.; Le Sommer, J.; Chassignet, E.; Molines, J.M.; Xu, X.; Albert, A.; Cosme, E. Spatial and temporal variability of the North Atlantic eddy field from two kilometric-resolution ocean models. J. Geophys. Res. Ocean. 2020, 125, e2019JC015827. [Google Scholar] [CrossRef]
- Ciani, D.; Charles, E.; Buongiorno Nardelli, B.; Rio, M.H.; Santoleri, R. Ocean currents reconstruction from a combination of altimeter and ocean colour data: A feasibility study. Remote Sens. 2021, 13, 2389. [Google Scholar] [CrossRef]
- Dong, J.; Fox-Kemper, B.; Zhu, J.; Dong, C. Application of symmetric instability parameterization in the Coastal and Regional Ocean Community Model (CROCO). J. Adv. Model. Earth Syst. 2021, 13, e2020MS002302. [Google Scholar] [CrossRef]
- Thiria, S.; Sorror, C.; Archambault, T.; Charantonis, A.; Bereziat, D.; Mejia, C.; Molines, J.M.; Crépon, M. Downscaling of ocean fields by fusion of heterogeneous observations using deep learning algorithms. Ocean Model. 2023, 182, 102174. [Google Scholar] [CrossRef]
- Archambault, T.; Filoche, A.; Charantonnis, A.; Béréziat, D. Multimodal Unsupervised Spatio-Temporal Interpolation of satellite ocean altimetry maps. In Proceedings of the VISAPP, Lisboa, Portugal, 19–21 February 2023. [Google Scholar]
- Martin, S.A.; Manucharyan, G.E.; Klein, P. Synthesizing sea surface temperature and satellite altimetry observations using deep learning improves the accuracy and resolution of gridded sea surface height anomalies. J. Adv. Model. Earth Syst. 2023, 15, e2022MS003589. [Google Scholar] [CrossRef]
- Martin, S.; Manucharyan, G.; Klein, P. Deep Learning Improves Global Satellite Observations of Ocean Eddy Dynamics. EarthArXiv Eprints 2024. [Google Scholar] [CrossRef]
- Emery, W.J.; Thomas, A.; Collins, M.; Crawford, W.R.; Mackas, D. An objective method for computing advective surface velocities from sequential infrared satellite images. J. Geophys. Res. Ocean. 1986, 91, 12865–12878. [Google Scholar] [CrossRef]
- Tokmakian, R.; Strub, P.T.; McClean-Padman, J. Evaluation of the maximum cross-correlation method of estimating sea surface velocities from sequential satellite images. J. Atmos. Ocean. Technol. 1990, 7, 852–865. [Google Scholar] [CrossRef]
- Kelly, K.A.; Strub, P.T. Comparison of velocity estimates from advanced very high resolution radiometer in the coastal transition zone. J. Geophys. Res. Ocean. 1992, 97, 9653–9668. [Google Scholar] [CrossRef]
- Isern-Fontanet, J.; Chapron, B.; Lapeyre, G.; Klein, P. Potential use of microwave sea surface temperatures for the estimation of ocean currents. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Thomas, A.; Carr, M.E.; Strub, P.T. Chlorophyll variability in eastern boundary currents. Geophys. Res. Lett. 2001, 28, 3421–3424. [Google Scholar] [CrossRef]
- Sokolov, S.; Rintoul, S.R. On the relationship between fronts of the Antarctic Circumpolar Current and surface chlorophyll concentrations in the Southern Ocean. J. Geophys. Res. Ocean. 2007, 112. [Google Scholar] [CrossRef]
- Gaube, P.; McGillicuddy, D.J., Jr.; Chelton, D.B.; Behrenfeld, M.J.; Strutton, P.G. Regional variations in the influence of mesoscale eddies on near-surface chlorophyll. J. Geophys. Res. Ocean. 2014, 119, 8195–8220. [Google Scholar] [CrossRef]
- Cutolo, E.; Pascual, A.; Ruiz, S.; Zarokanellos, N.; Fablet, R. CLOINet: Ocean state reconstructions through remote-sensing, in-situ sparse observations and Deep Learning. arXiv 2022, arXiv:2210.10767. [Google Scholar] [CrossRef]
- Ioannou, A.; Stegner, A.; Tuel, A.; LeVu, B.; Dumas, F.; Speich, S. Cyclostrophic corrections of AVISO/DUACS surface velocities and its application to mesoscale eddies in the Mediterranean Sea. J. Geophys. Res. Ocean. 2019, 124, 8913–8932. [Google Scholar] [CrossRef]
- Buongiorno Nardelli, B.; Tronconi, C.; Pisano, A.; Santoleri, R. High and Ultra-High resolution processing of satellite Sea Surface Temperature data over Southern European Seas in the framework of MyOcean project. Remote Sens. Environ. 2013, 129, 1–16. [Google Scholar] [CrossRef]
- Gaultier, L.; Ubelmann, C.; Fu, L.L. The challenge of using future SWOT data for oceanic field reconstruction. J. Atmos. Ocean. Technol. 2016, 33, 119–126. [Google Scholar] [CrossRef]
- Liu, J.; Tang, J.; Wu, G. AdaDM: Enabling Normalization for Image Super-Resolution. arXiv 2021, arXiv:2111.13905. [Google Scholar]
- Murugesan, B.; Sarveswaran, K.; Shankaranarayana, S.M.; Ram, K.; Sivaprakasam, M. Psi-Net: Shape and boundary aware joint multi-task deep network for medical image segmentation. arXiv 2019, arXiv:1902.04099. [Google Scholar]













| Model | Correct Angles, % | Correct Magnitudes, % |
|---|---|---|
| AVISO/DUACS | 67.86 | 38.57 |
| HIRES-CUR w/o SST | 66.56 | 43.50 |
| HIRES-CUR | 71.73 | 45.73 |
| Input | Model | Correct Angles, % | Correct Magnitudes, % |
|---|---|---|---|
| L4 SST | HIRES-CUR | 71.73 | 45.73 |
| HIRES-CUR-cloud | 73.20 | 48.13 | |
| L3 SST | HIRES-CUR | 61.23 | 40.23 |
| HIRES-CUR-cloud | 72.47 | 48.17 |
| % Clouds | Model | Correct Ang., % | Correct Mag., % | # Drifter-Days |
|---|---|---|---|---|
| ≥80% (very high) | AVISO/DUACS | 62.28 | 32.70 | 896 |
| HIRES-CUR | 62.31 | 35.27 | ||
| HIRES-CUR-cloud | 65.18 | 41.18 | ||
| 60–80% (high) | AVISO/DUACS | 66.43 | 38.52 | 283 |
| HIRES-CUR | 68.94 | 44.52 | ||
| HIRES-CUR-cloud | 71.02 | 48.76 | ||
| 40–60% (medium) | AVISO/DUACS | 67.66 | 40.26 | 303 |
| HIRES-CUR | 69.33 | 46.86 | ||
| HIRES-CUR-cloud | 75.25 | 53.14 | ||
| <40% (low) | AVISO/DUACS | 72.57 | 42.73 | 1163 |
| HIRES-CUR | 80.49 | 53.83 | ||
| HIRES-CUR-cloud | 79.19 | 52.02 |
| % Clouds | Model | Input | Correct Ang., % | Correct Mag., % |
|---|---|---|---|---|
| <40% (low) | HIRES-CUR | Real-time | 80.49 | 53.83 |
| Delayed-time | 81.33 | 56.00 |
| Input | Model | Fine-Tuning | Correct Ang., % | Correct Mag., % |
|---|---|---|---|---|
| - | AVISO/DUACS | - | 65.22 | 33.10 |
| L4 SST | HIRES-CUR-cloud | None | 72.23 | 43.07 |
| HIRES-CUR-ftune | Real | 73.32 | 41.32 | |
| L3 SST | HIRES-CUR-cloud | None | 72.29 | 44.04 |
| HIRES-CUR-ftune | Real | 73.30 | 41.58 |
| Input | Model | Pre-Train | Correct Ang., % | Correct Mag., % |
|---|---|---|---|---|
| - | AVISO/DUACS | - | 65.22 | 33.10 |
| L3 SST | HIRES-CUR-real | None | 70.34 | 43.95 |
| L3 CHL | HIRES-CUR-real | None | 69.90 | 42.00 |
| Model | Correct Angles, % | Correct Magnitudes, % |
|---|---|---|
| HIRES-CUR w/o SSH | 71.18 | 39.65 |
| HIRES-CUR | 71.73 | 45.73 |
| # Decoders | Model | Correct Angles, % | Correct Magnitudes, % |
|---|---|---|---|
| 1 | HIRES-CUR | 69.13 | 45.30 |
| 3 | HIRES-CUR | 71.73 | 45.73 |
| Model | Average Angle Error, Degrees | Average Magnitude Error, m/s |
|---|---|---|
| AVISO/DUACS | 38.61 | 0.16 |
| HIRES-CUR | 26.87 | 0.12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kugusheva, A.; Bull, H.; Moschos, E.; Ioannou, A.; Le Vu, B.; Stegner, A. Ocean Satellite Data Fusion for High-Resolution Surface Current Maps. Remote Sens. 2024, 16, 1182. https://doi.org/10.3390/rs16071182
Kugusheva A, Bull H, Moschos E, Ioannou A, Le Vu B, Stegner A. Ocean Satellite Data Fusion for High-Resolution Surface Current Maps. Remote Sensing. 2024; 16(7):1182. https://doi.org/10.3390/rs16071182
Chicago/Turabian StyleKugusheva, Alisa, Hannah Bull, Evangelos Moschos, Artemis Ioannou, Briac Le Vu, and Alexandre Stegner. 2024. "Ocean Satellite Data Fusion for High-Resolution Surface Current Maps" Remote Sensing 16, no. 7: 1182. https://doi.org/10.3390/rs16071182