
Development of a Dynamic Prediction Model for Underground Coal-Mining-Induced Ground Subsidence Based on the Hook Function

Abstract
:1. Introduction
2. Materials
2.1. Study Area
2.2. Data
3. Methods
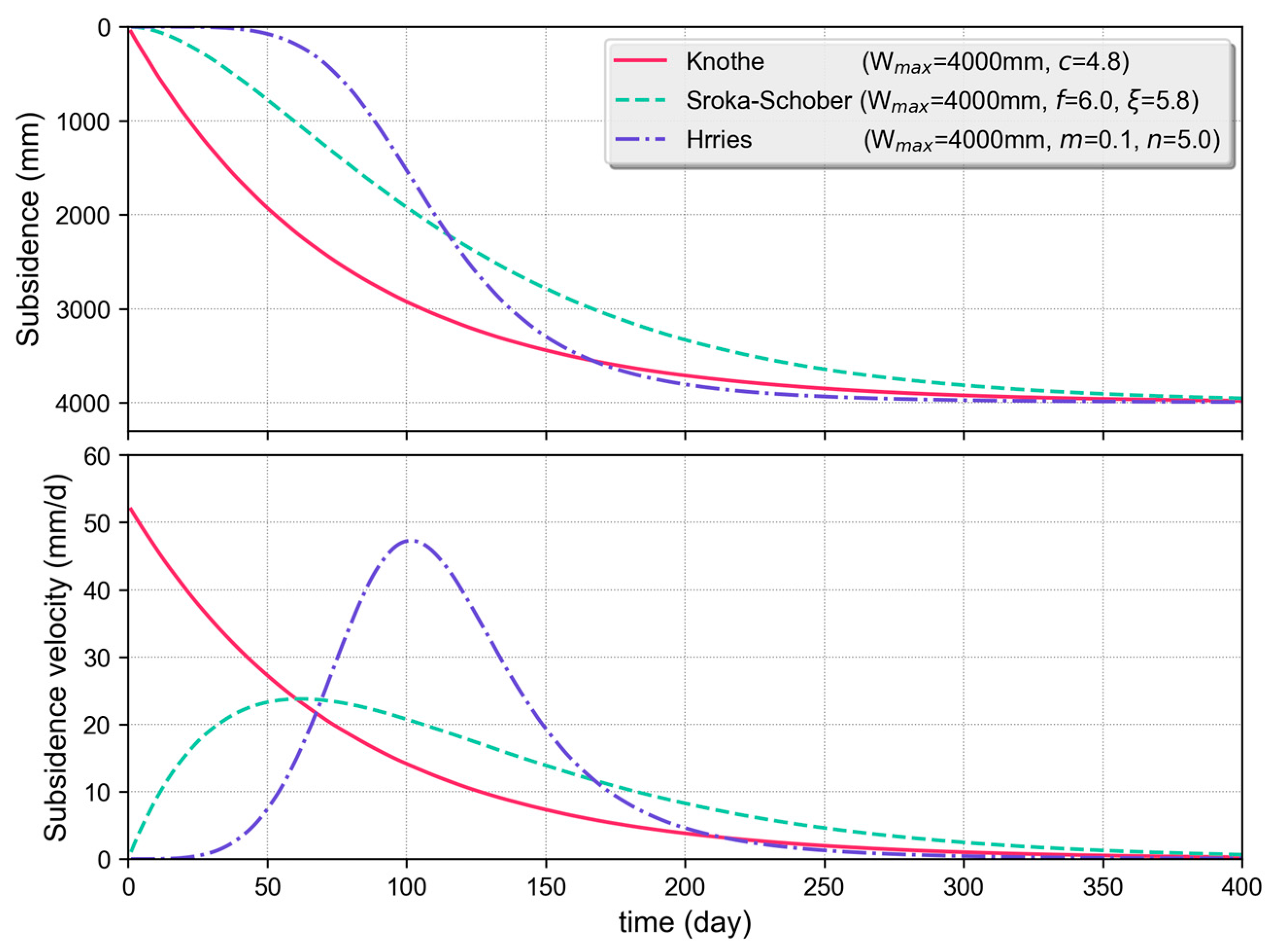
3.1. Typical Dynamic Prediction Models for Ground Subsidence
3.2. Hook Function
3.3. Proposed Dynamic Prediction Model
3.4. Relationship between the Model Coefficients and Geological and Mining Conditions
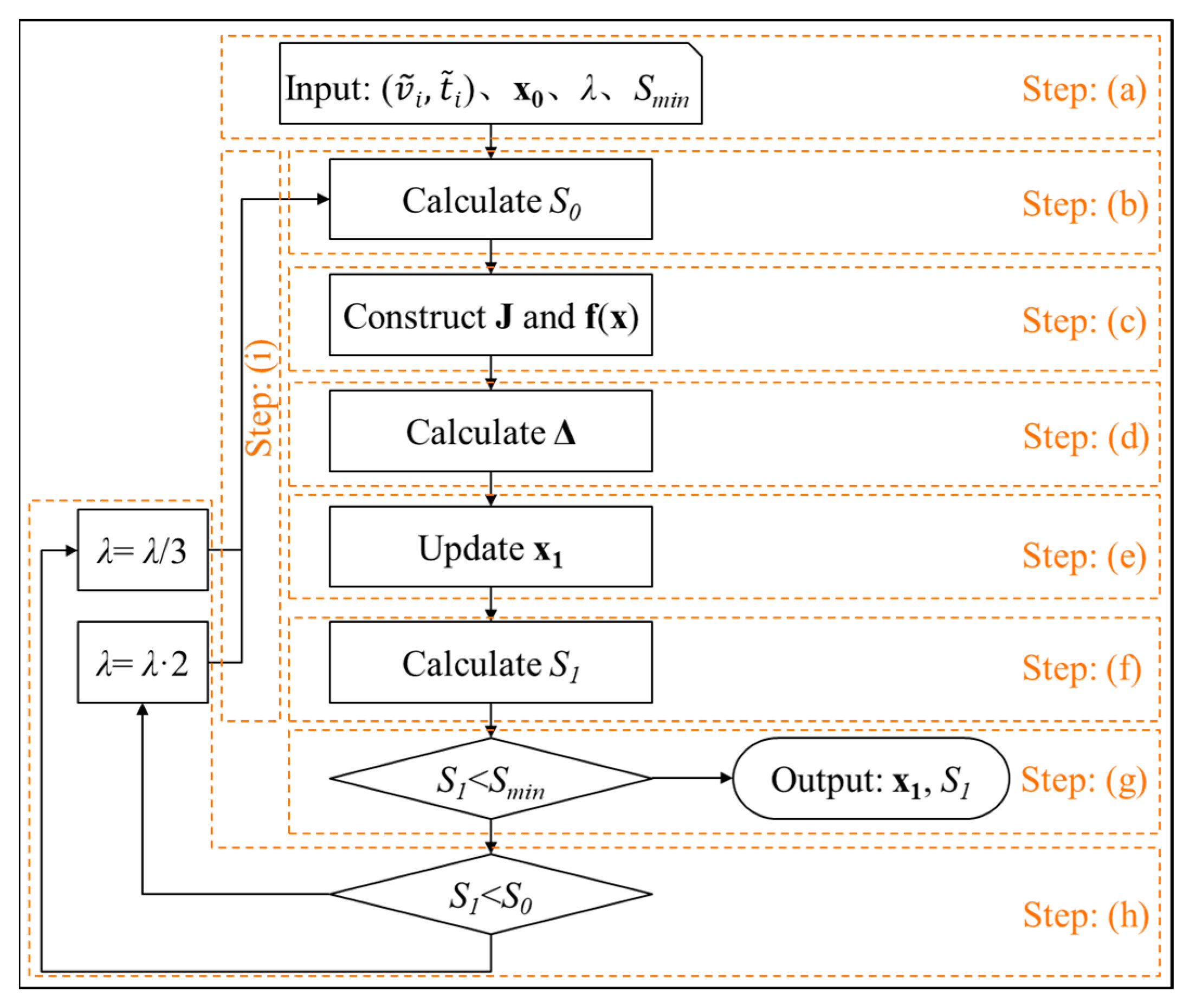
3.5. Retrieval of the Model Coefficients Using Subsidence Velocity Observations
- (a)
- Input the observation series of ground subsidence velocity, initial values of the model coefficients, damping coefficient and limit error Smin.
- (b)
- Calculate the residual sum of the squares between the observed and predicted results S0 using the observation series and initial model coefficients based on (22).
- (c)
- Construct the Jacobian matrix J and residual matrix f(x) using (24) and (26), respectively.
- (d)
- Calculate the cost function matrix ∆ using (23).
- (e)
- Update the optimal prediction model coefficients by:
- (f)
- Calculate the residual sum of the squares between the observed and predicted results S1 with the updated model coefficients x1.
- (g)
- If S1 is less than the limit error Smin, output the updated model coefficients and the residual sum of the squares.
- (h)
- If S1 > Smin and S1 < S0, increase λ twofold; otherwise, decrease λ threefold.
- (i)
- Assign the updated prediction model coefficients and the damping coefficient to the corresponding initial coefficient and return to step (b).
4. Results
5. Discussion
5.1. Ground Subsidence Velocity
5.2. Dynamic Ground Subsidence
5.3. Gap between the Proposed Method and the Existing Methods
6. Conclusions
- (a)
- The acceleration of ground subsidence (or a derivative of subsidence velocity) is related to the maximum subsidence velocity at the ground point and the mining velocity; the acceleration is proportional to the two velocities. Thus, decreasing the mining velocity artificially is an effective way to control the intensity of ground perturbations induced by underground coal mining.
- (b)
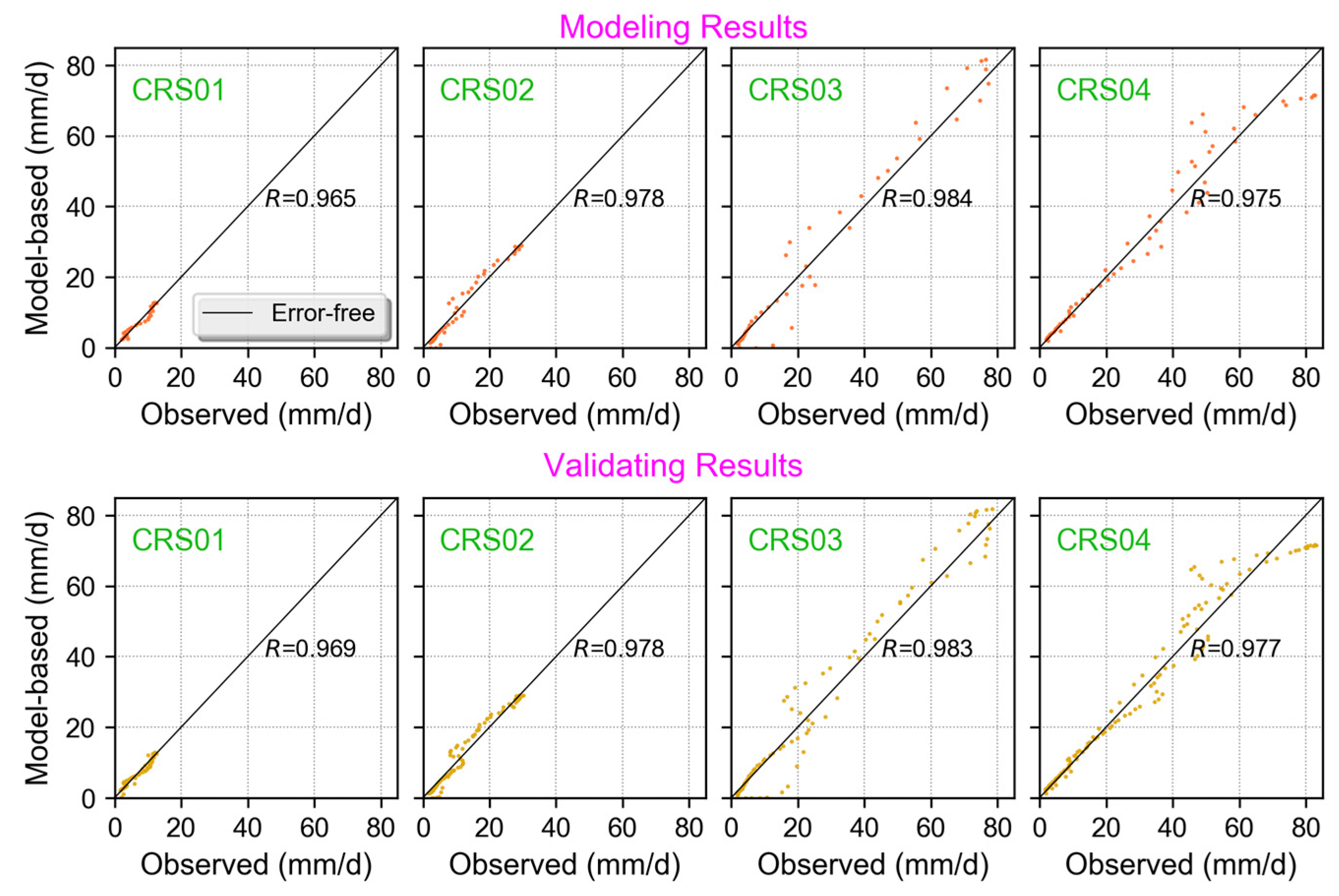
- The developed model can be used to predict the subsidence velocity well. When the maximum subsidence velocity is less than 80 mm/d, the RMS of the model-predicted subsidence velocity error is 4.18 mm/d; the maximum relative error for the model-predicted subsidence velocity is 23.1%.
- (c)
- In addition to subsidence velocity, the model can also predict ground subsidence accurately. When the maximum ground subsidence is less than 6000 mm, the RMS of the model-predicted subsidence error is 56.1 mm; the maximum relative error for the model-predicted subsidence is 2.5%.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, C.; Zhong, L.; Fu, X.; Zhao, Z. Managing Scarce Water Resources in China’s Coal Power Industry. Environ. Manag. 2016, 57, 1188–1203. [Google Scholar] [CrossRef] [PubMed]
- Bell, F.G.; Stacey, T.R.; Genske, D.D. Mining subsidence and its effect on the environment: Some differing examples. Environ. Geol. 2000, 40, 135–152. [Google Scholar] [CrossRef]
- Kay, D.J. Managing mine subsidence along railways and highway pavements in the southern coalfield. J. News Aust. Geomech. Soc. 2012, 47, 33–52. [Google Scholar]
- Karanam, V.; Motagh, M.; Garg, S.; Jain, K. Multi-sensor remote sensing analysis of coal fire induced land subsidence in Jharia Coalfields, Jharkhand, India. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102439. [Google Scholar] [CrossRef]
- Li, L.; Li, W.; Wang, Q. Prediction and zoning of the impact of underground coal mining on groundwater resources. Process Saf. Environ. Prot. 2022, 168, 454–462. [Google Scholar] [CrossRef]
- Fan, G.; Zhang, D. Mechanisms of Aquifer Protection in Underground Coal Mining. Mine Water Environ. 2015, 34, 95–104. [Google Scholar] [CrossRef]
- Badrul Alam, A.K.M.; Fujii, Y.; Eidee, S.; Boeut, S.; Rahim, A.B. Prediction of mining-induced subsidence at Barapukuria longwall coal mine, Bangladesh. Sci. Rep. 2022, 12, 14800. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, J. Ground Subsidence Monitoring in a Mining Area Based on Mountainous Time Function and EnKF Methods Using GPS Data. Remote Sens. 2022, 14, 6359. [Google Scholar] [CrossRef]
- Cheng, H.; Zhang, L.; Guo, L.; Wang, X.; Peng, S. A New Dynamic Prediction Model for Underground Mining Subsidence Based on Inverse Function of Unstable Creep. Adv. Civ. Eng. 2021, 2021, 9922136. [Google Scholar] [CrossRef]
- He, L.; Wu, D.; Ma, L. Numerical simulation and verification of goaf morphology evolution and surface subsidence in a mine. Eng. Fail. Anal. 2023, 144, 106918. [Google Scholar] [CrossRef]
- Knothe, S. Effect of time on formation of basin subsidence. Arch. Min. Steel Ind. 1953, 1, 1–7. [Google Scholar]
- Peng, X.; Cui, X.; Zang, Y.; Wang, Y.; Yuan, D. Time function and prediction of progressive surface movement sand deformations. J. Univ. Sci. Technol. Beijing 2004, 26, 341–344. [Google Scholar]
- Kwinta, A.; Hejmanowski, R.; Sroka, A. Time function analysis used for the prediction of rock mass subsidence. In Proceedings of the International Symposium on Mining Science and Technology, Xuzhou, China, 16 October 1996; pp. 419–424. [Google Scholar]
- Liu, Y. Dynamic surface subsidence curve model based on Weibull time function. Rock Soil Mech. 2013, 34, 2409–2413. [Google Scholar]
- Han, J.; Hu, C.; Zou, J. Time Function Model of Surface Subsidence Based on Inversion Analysis in Deep Soil Strata. Math. Probl. Eng. 2020, 2020, 4279401. [Google Scholar] [CrossRef]
- Liu, C.; Gao, J.; Yu, X.; Zhang, J.; Zhang, A. Mine surface deformation monitoring using modified GPS RTK with surveying rod: Initial results. Surv. Rev. 2015, 47, 79–86. [Google Scholar] [CrossRef]
- Mcclusky, S.; Balassanian, S.; Barka, A.; Demir, C.; Ergintav, S.; Georgiev, I.; Gurkan, O.; Hamburger, M.; Hurst, K.; Kahle, H.; et al. Global Positioning System constraints on plate kinematics and dynamics in the eastern Mediterranean and Caucasus. J. Geophys. Res. 2000, 105, 5695–5719. [Google Scholar] [CrossRef]
- Wang, J.; Peng, X.; Xu, C. Coal mining GPS subsidence monitoring technology and its application. Min. Sci. Technol. (China) 2011, 21, 463–467. [Google Scholar] [CrossRef]
- Gao, J.; Liu, C.; Wang, J.; Li, Z.; Meng, X. A new method for mining deformation monitoring with GPS-RTK. Trans. Nonferrous Met. Soc. China 2011, 21, s659–s664. [Google Scholar] [CrossRef]
- Li, X.; Wang, B.; Li, X.; Huang, J.; Lyu, H.; Han, X. Principle and performance of multi-frequency and multi-GNSS PPP-RTK. Satell. Navig. 2022, 3, 1–11. [Google Scholar] [CrossRef]
- Herring, T.A.; Melbourne, T.I.; Murray, M.H.; Floyd, M.A.; Szeliga, W.M.; King, R.W.; Phillips, D.A.; Puskas, C.M.; Santillan, M.; Wang, L. Plate Boundary Observatory and related networks: GPS data analysis methods and geodetic products. Rev. Geophys. 2016, 54, 759–808. [Google Scholar] [CrossRef]
- Gao, J.; Hong, H. Advanced GNSS technology of mining deformation monitoring. Procedia Earth Planet. Sci. 2009, 1, 1081–1088. [Google Scholar]
- Yang, D.; Zou, J. Precise levelling in crossing river over 5 km using total station and GNSS. Sci. Rep. 2021, 11, 7492. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Wang, J.; Guo, J.; Yuan, H.; Li, P. Time function of surface subsidence based on Harris model in mined-out area. Int. J. Min. Sci. Technol. 2013, 23, 245–248. [Google Scholar] [CrossRef]
- Liu, X.; Xu, L.; Zhang, K. Strata Movement Characteristics in Underground Coal Gasification (UCG) under Thermal Coupling and Surface Subsidence Prediction Methods. Appl. Sci. 2023, 13, 5192. [Google Scholar] [CrossRef]
- Mehrabi, A.; Derakhshani, R.; Nilfouroushan, F.; Rahnamarad, J.; Azarafza, M. Spatiotemporal subsidence over Pabdana coal mine Kerman Province, central Iran using time-series of Sentinel-1 remote sensing imagery. Episodes 2023, 46, 19–33. [Google Scholar] [CrossRef]
- Przylucka, M.; Kowalski, Z.; Perski, Z. Twenty years of coal mining-induced subsidence in the Upper Silesia in Poland identified using InSAR. Int. J. Coal Sci. Technol. 2022, 9, 86. [Google Scholar] [CrossRef]
- Yan, W.; Chen, J.; Tan, Y.; He, R.; Yan, S. Surface Dynamic Damage Prediction Model of Horizontal Coal Seam Based on the Idea of Wave Lossless Propagation. Int. J. Environ. Res. Public Health 2022, 19, 6862. [Google Scholar] [CrossRef]
- Behera, A.; Rawat, K.S. A brief review paper on mining subsidence and its geo-environmental impact. Mater. Today Proc. 2023; in press. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Cheng, H.; Yao, Z.; Wang, X. Application of the Improved Knothe Time Function Model in the Prediction of Ground Mining Subsidence: A Case Study from Heze City, Shandong Province, China. Appl. Sci. 2020, 10, 3147. [Google Scholar] [CrossRef]
- Meurer, A.; Smith, C.P.; Paprocki, M.; Čertík, O.; Kirpichev, S.B.; Rocklin, M.; Kumar, A.; Ivanov, S.; Moore, J.K.; Singh, S.; et al. SymPy: Symbolic computing in Python. PeerJ Comput. Sci. 2017, 3, e103. [Google Scholar] [CrossRef]
- Livet, C.; Rouvier, T.; Sauret, C.; Pillet, H.; Dumont, G.; Pontonnier, C. A penalty method for constrained multibody kinematics optimisation using a Levenberg–Marquardt algorithm. Comput. Methods Biomech. Biomed. Eng. 2023, 26, 864–875. [Google Scholar] [CrossRef] [PubMed]
- Guo, W.; Bai, E.; Yang, D. Surface subsidence characteristics and damage protection techniques of high-intensity mining in China. Adv. Coal Mine Ground Control. 2017, 157–203. [Google Scholar] [CrossRef]
- Li, H.; Qi, Q.; Du, W.; Li, X. A criterion of rockburst in coal mines considering the influence of working face mining velocity. Geomech. Geophys. Geo-Energy Geo-Resour. 2022, 8, 37. [Google Scholar] [CrossRef]
- Howitt, G.D.; Luus, R. Model reduction by minimization of integral square error performance indices. J. Frankl. Inst. 1990, 327, 343–357. [Google Scholar] [CrossRef]
- Donnelly, L.J.; Cruz, D.; Asmar, I.; Zapata, O.; Perez, J.D. The monitoring and prediction of mining subsidence in the Amaga, Angelopolis, Venecia and Bolombolo Regions, Antioquia, Colombia. Eng. Geol. 2001, 59, 103–114. [Google Scholar] [CrossRef]
- Cai, Y.; Jin, Y.; Wang, Z.; Chen, T.; Wang, Y.; Kong, W.; Xiao, W.; Li, X.; Lian, X.; Hu, H. A review of monitoring, calculation, and simulation methods for ground subsidence induced by coal mining. Int. J. Coal Sci. Technol. 2023, 10, 32. [Google Scholar] [CrossRef]
- Li, H.; Zha, J.; Guo, G. A new dynamic prediction method for surface subsidence based on numerical model parameter sensitivity. J. Clean. Prod. 2019, 233, 1418–1424. [Google Scholar] [CrossRef]
- Jing, L. A review of techniques, advances and outstanding issues in numerical modelling for rock mechanics and rock engineering. Int. J. Rock Mech. Min. Sci. 2003, 40, 283–353. [Google Scholar] [CrossRef]
- Ma, F.; Yang, F. Research on numerical simulation of stratum subsidence. J. Liaoning Tech. Univ. (Nat. Sci.) 2001, 20, 257–261. [Google Scholar]
- Liu, X.; Zhao, Y.; Zhou, F. Dynamic prediction of mining-induced subsidence based on a hybrid model. J. Min. Saf. Eng. 2020, 37, 163–170. [Google Scholar]
- Wang, J.; Wang, X. Dynamic prediction of mining-induced subsidence using a neural network model. Arab. J. Geosci. 2017, 10, 170–192. [Google Scholar]
- Wang, K.; Wang, L. Time function analysis of mining-induced subsidence based on a backpropagation neural network. J. Appl. Geophys. 2018, 157, 57–65. [Google Scholar]
- Yang, Q.; Tang, H.; Wang, X. Dynamic prediction of mining-induced subsidence based on a random forest model. J. Min. Saf. Eng. 2018, 35, 350–356. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Mean (mm/d) | STD (mm/d) | RMSE (mm/d) | vmax (mm/d) |
|---|---|---|---|---|
| CRS01 | 0.03 | 0.98 | 0.98 | 12.57 |
| CRS02 | 0.13 | 2.11 | 2.12 | 29.64 |
| CRS03 | 0.79 | 5.12 | 5.23 | 78.30 |
| CRS04 | 0.31 | 5.37 | 5.38 | 82.70 |
| All | 0.34 | 4.23 | 4.24 | 82.70 |
| Station | Mean (mm/d) | STD (mm/d) | RMSE (mm/d) | vmax (mm/d) |
|---|---|---|---|---|
| CRS01 | 0.02 | 0.95 | 0.95 | 12.51 |
| CRS02 | 0.16 | 2.10 | 2.11 | 30.17 |
| CRS03 | 0.76 | 5.17 | 5.23 | 78.30 |
| CRS04 | 0.31 | 5.22 | 5.23 | 83.04 |
| All | 0.34 | 4.17 | 4.18 | 83.04 |
| Station | SVIR (mm/d2) | SVDR (mm/d2) | Mining Velocity (m/d) |
|---|---|---|---|
| CRS01 | 2.72 | −0.80 | 3.5 |
| CRS02 | 2.79 | −0.83 | 3.2 |
| CRS03 | 5.76 | −1.11 | 4.3 |
| CRS04 | 2.73 | −0.80 | 1.4 |
| Station | Mean (mm) | STD (mm) | RMSE (mm) | Wmax (mm) | MRE (%) |
|---|---|---|---|---|---|
| CRS01 | −36.0 | 21.2 | 41.8 | 808.0 | 8.3 |
| CRS02 | −60.5 | 47.9 | 77.2 | 1678.1 | 7.6 |
| CRS03 | −11.3 | 54.4 | 55.6 | 3911.0 | 3.7 |
| CRS04 | −9.0 | 39.4 | 40.4 | 5820.7 | 2.5 |
| All | −29.8 | 47.5 | 56.1 | 5820.7 | 2.5 |
| Type | Time Function Method | Numerical Method | Machine Learning Method |
|---|---|---|---|
| Typical method | Knothe model Kowalski model Sroka–Schober model Hrries model | FLAC3D simulation 3DEC simulation | Neural network model Support vector machine model Random forest model |
| Advantages | Fewer modeling data Explicit function expression Moderate prediction accuracy | Describes the mechanical mechanism of ground subsidence well | High prediction accuracy |
| Disadvantages | Weak association between model parameters and geological and mining parameters Incapable of describing the mechanical mechanism of ground subsidence | Inferior prediction accuracy | Large volume of modeling data Inexplicit function expression Incapable of describing the mechanical mechanism of ground subsidence |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bo, H.; Lu, G.; Li, H.; Guo, G.; Li, Y. Development of a Dynamic Prediction Model for Underground Coal-Mining-Induced Ground Subsidence Based on the Hook Function. Remote Sens. 2024, 16, 377. https://doi.org/10.3390/rs16020377
Bo H, Lu G, Li H, Guo G, Li Y. Development of a Dynamic Prediction Model for Underground Coal-Mining-Induced Ground Subsidence Based on the Hook Function. Remote Sensing. 2024; 16(2):377. https://doi.org/10.3390/rs16020377
Chicago/Turabian StyleBo, Huaizhi, Guohong Lu, Huaizhan Li, Guangli Guo, and Yunwei Li. 2024. "Development of a Dynamic Prediction Model for Underground Coal-Mining-Induced Ground Subsidence Based on the Hook Function" Remote Sensing 16, no. 2: 377. https://doi.org/10.3390/rs16020377