
Rice Yield Prediction in Different Growth Environments Using Unmanned Aerial Vehicle-Based Hyperspectral Imaging

Abstract
:1. Introduction
2. Materials and Methods
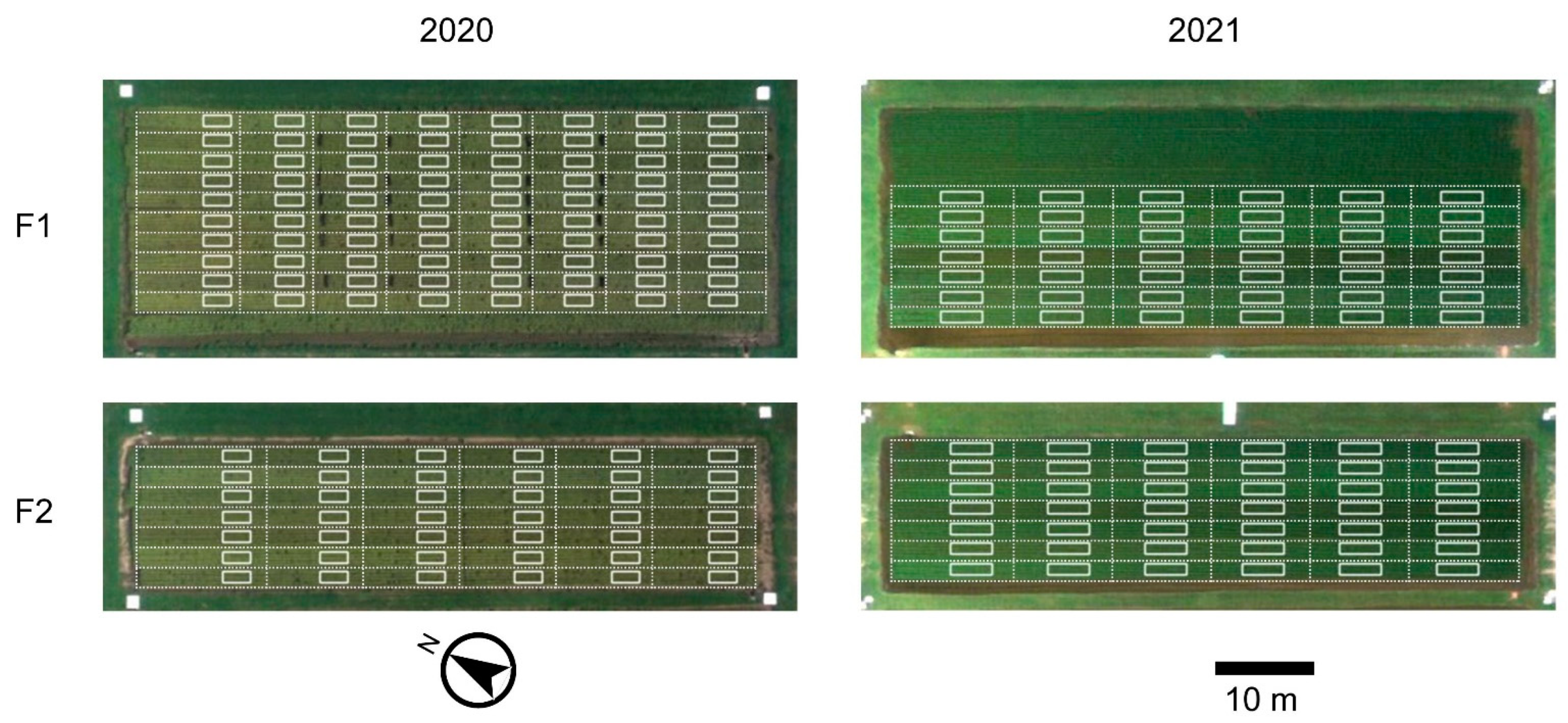
2.1. Study Site and Field Survey
2.2. UAV-Based Hyperspectral Imaging
2.3. Image Processing
2.4. Regression Analysis
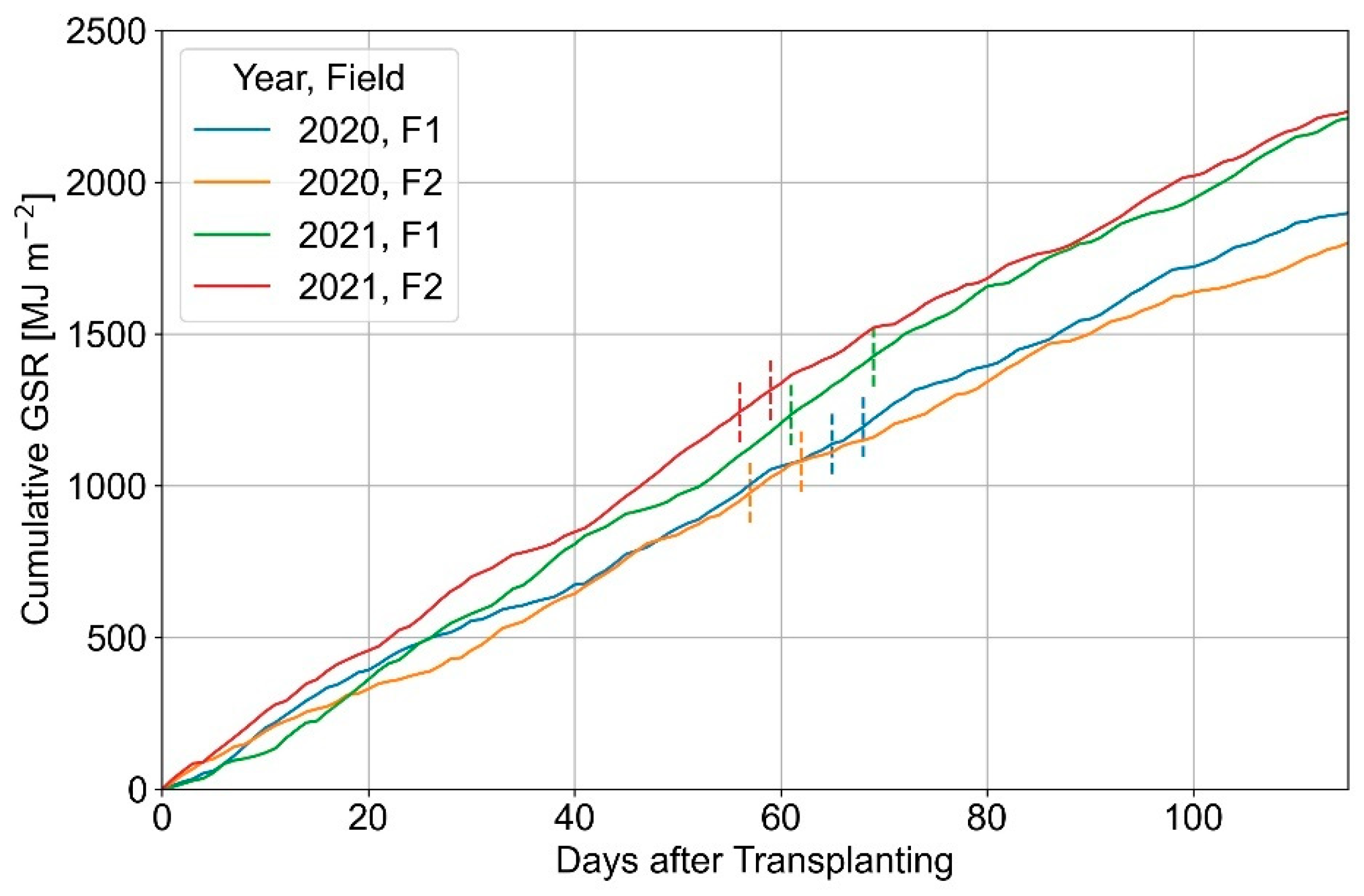
2.5. Solar Radiation Data
3. Results
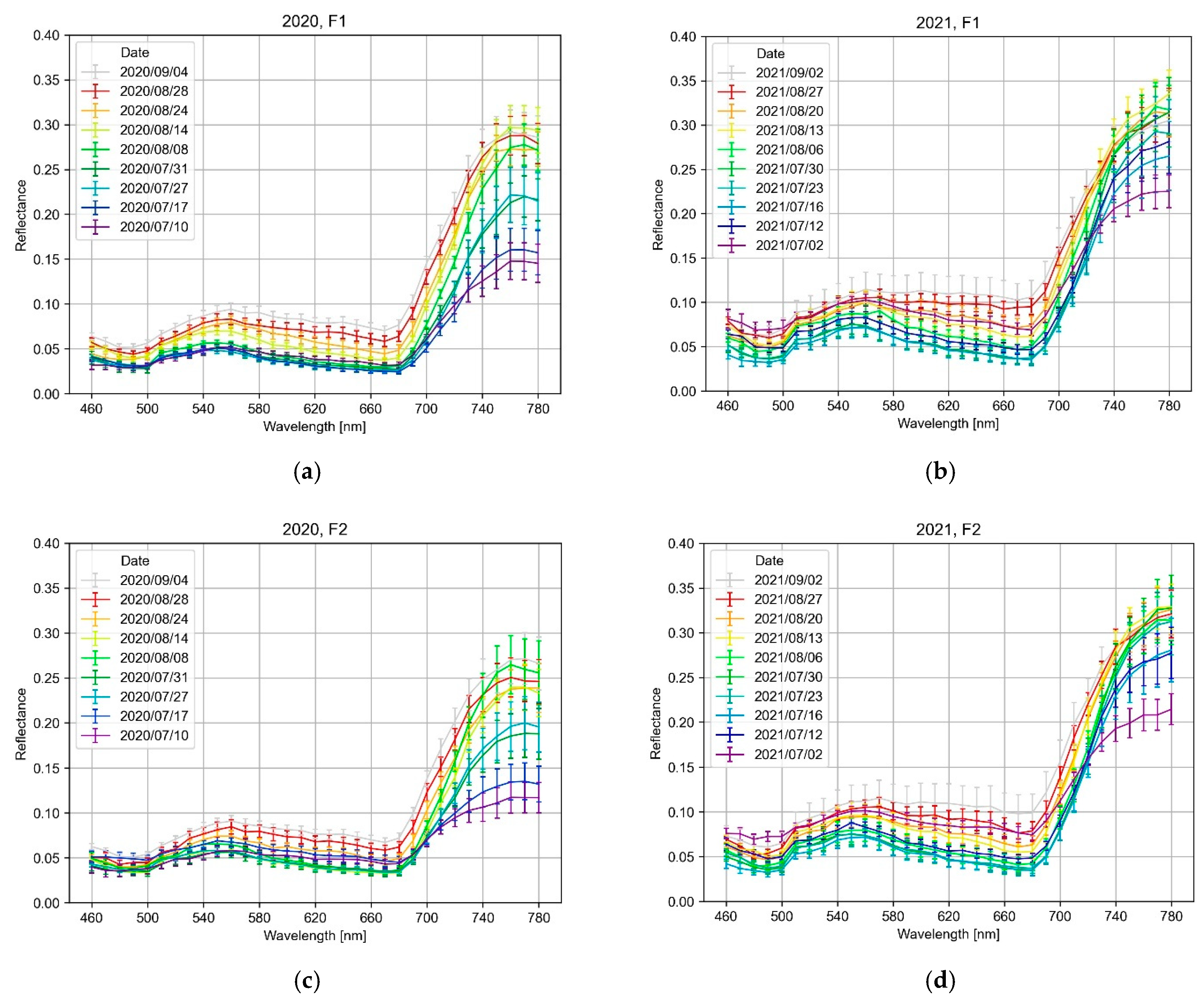
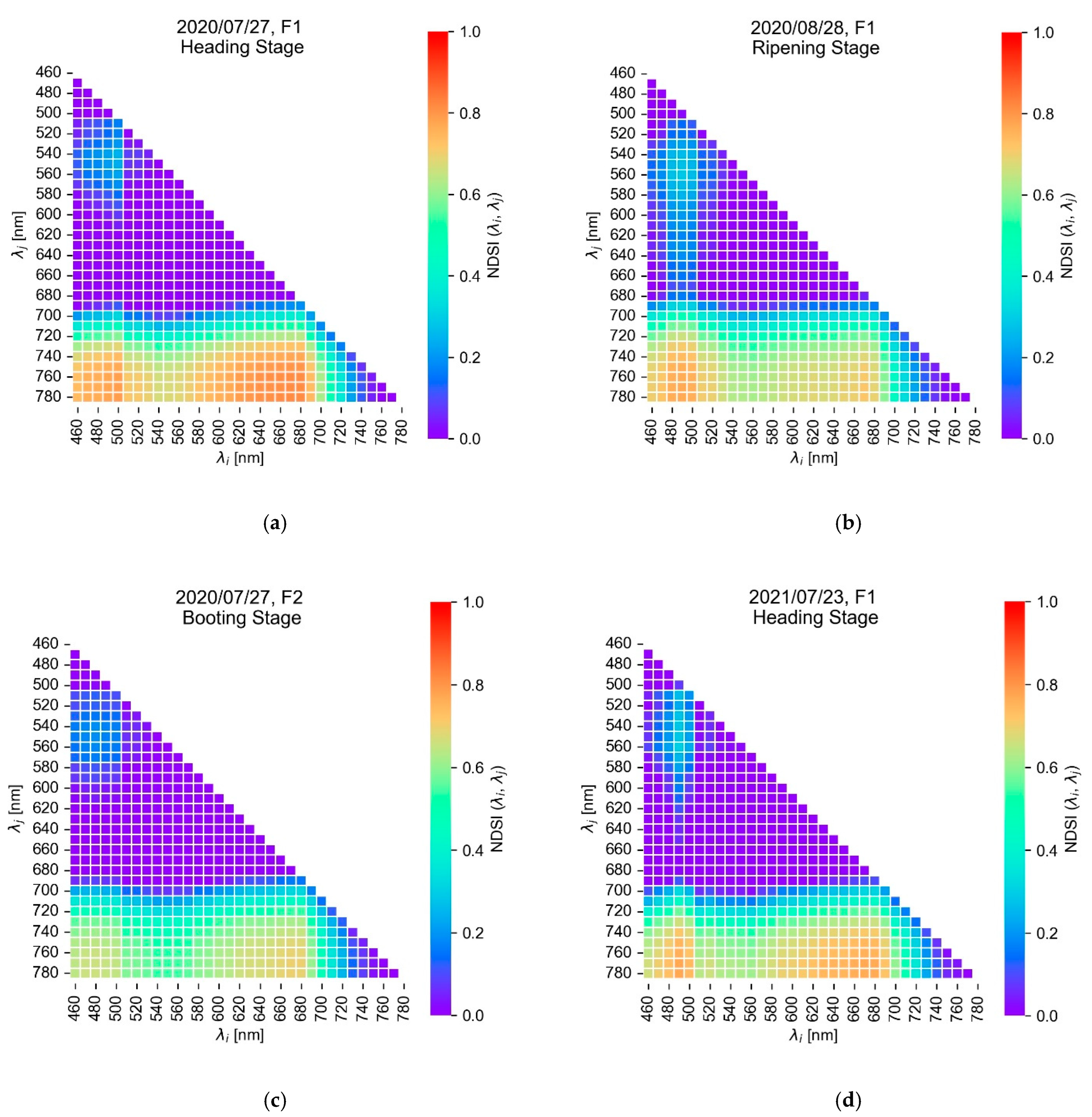
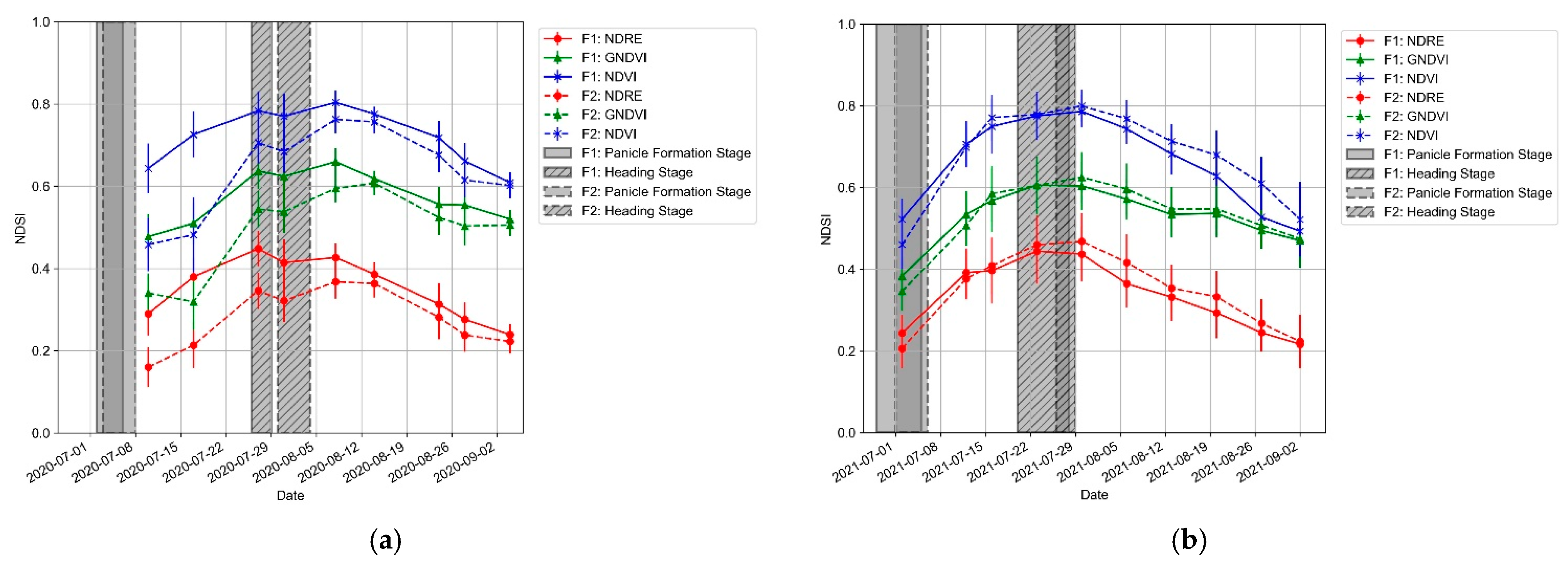
3.1. Reflectance Spectra and NDSI
3.2. Yield and Yield Components
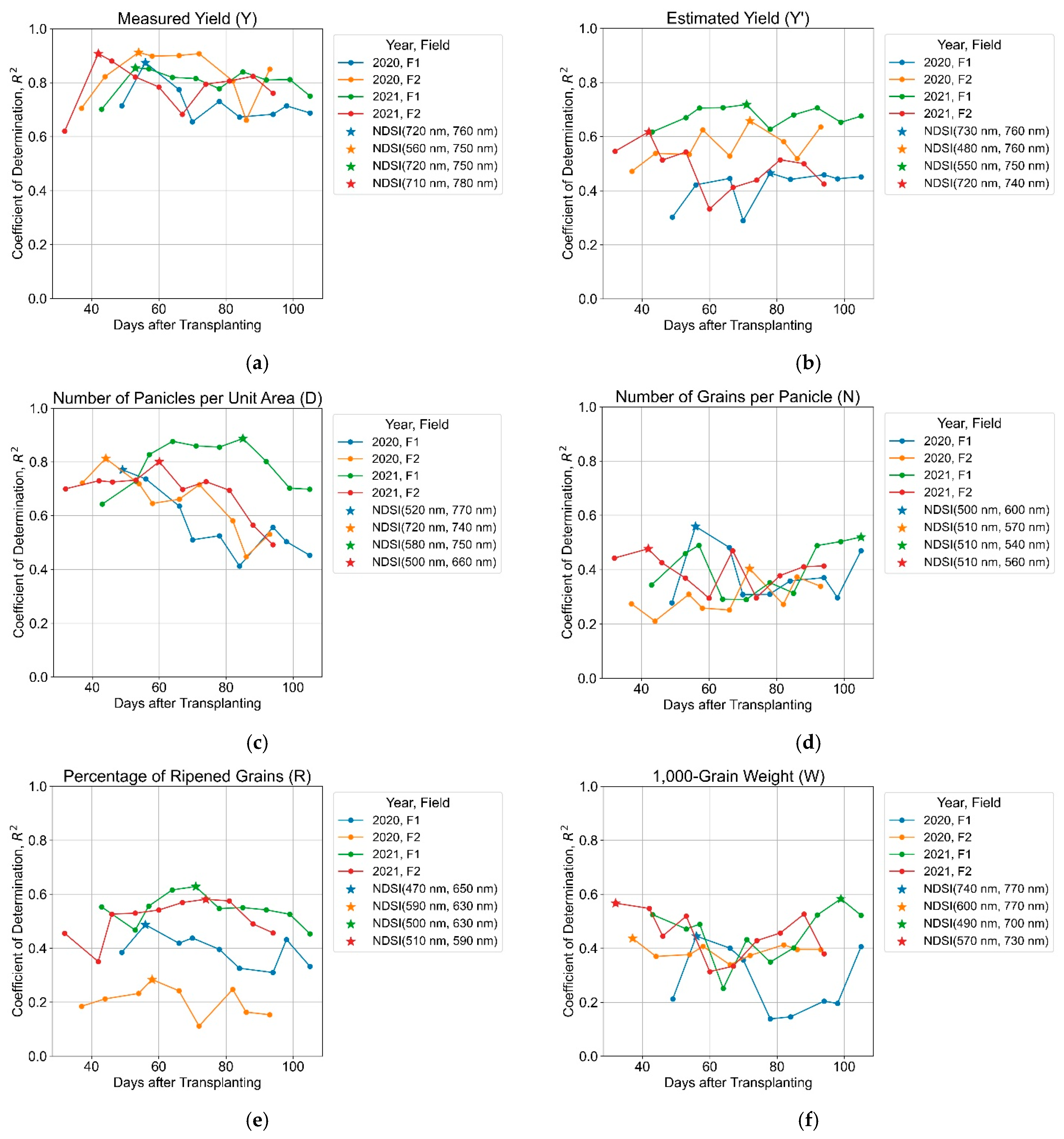
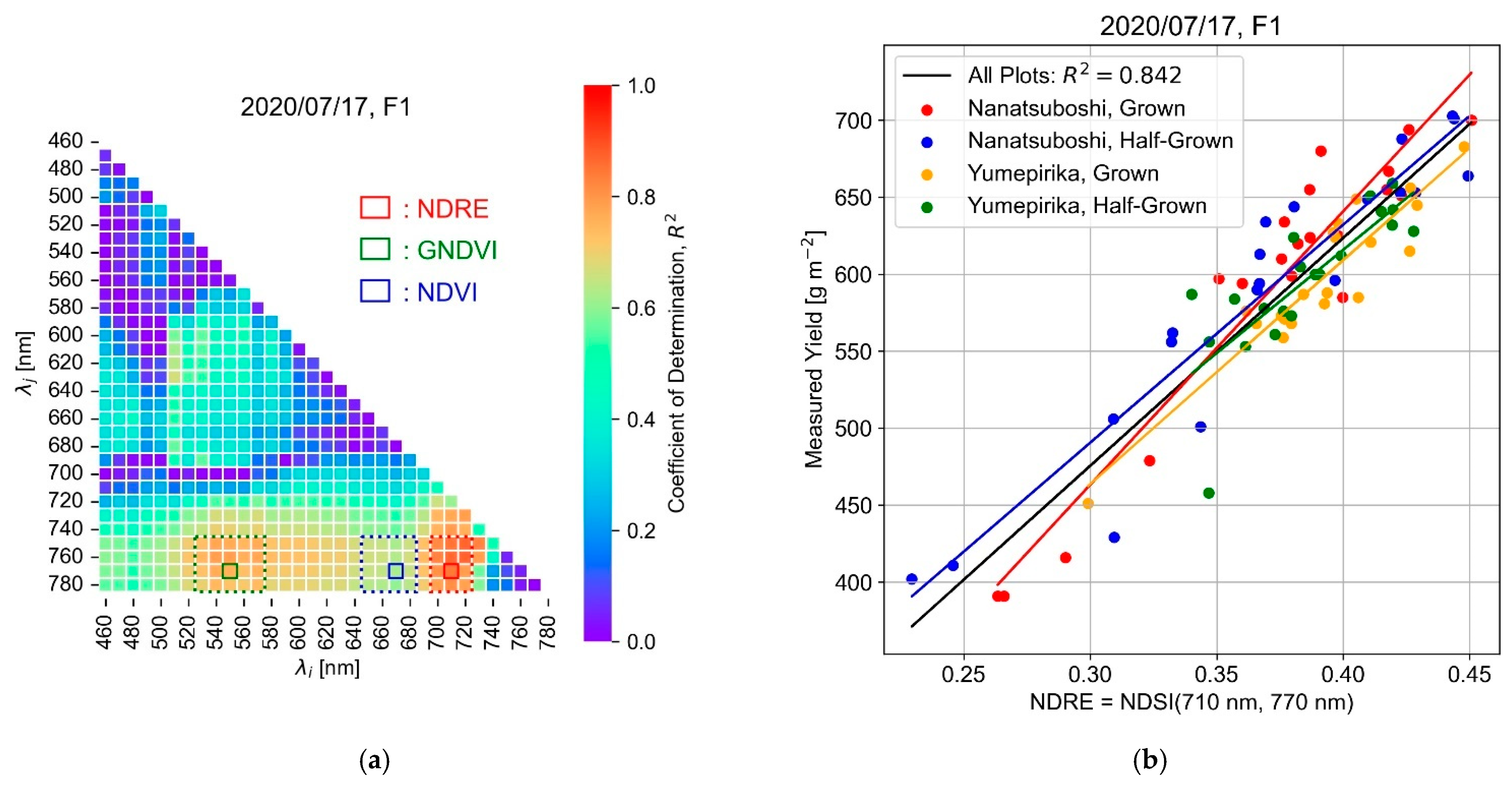
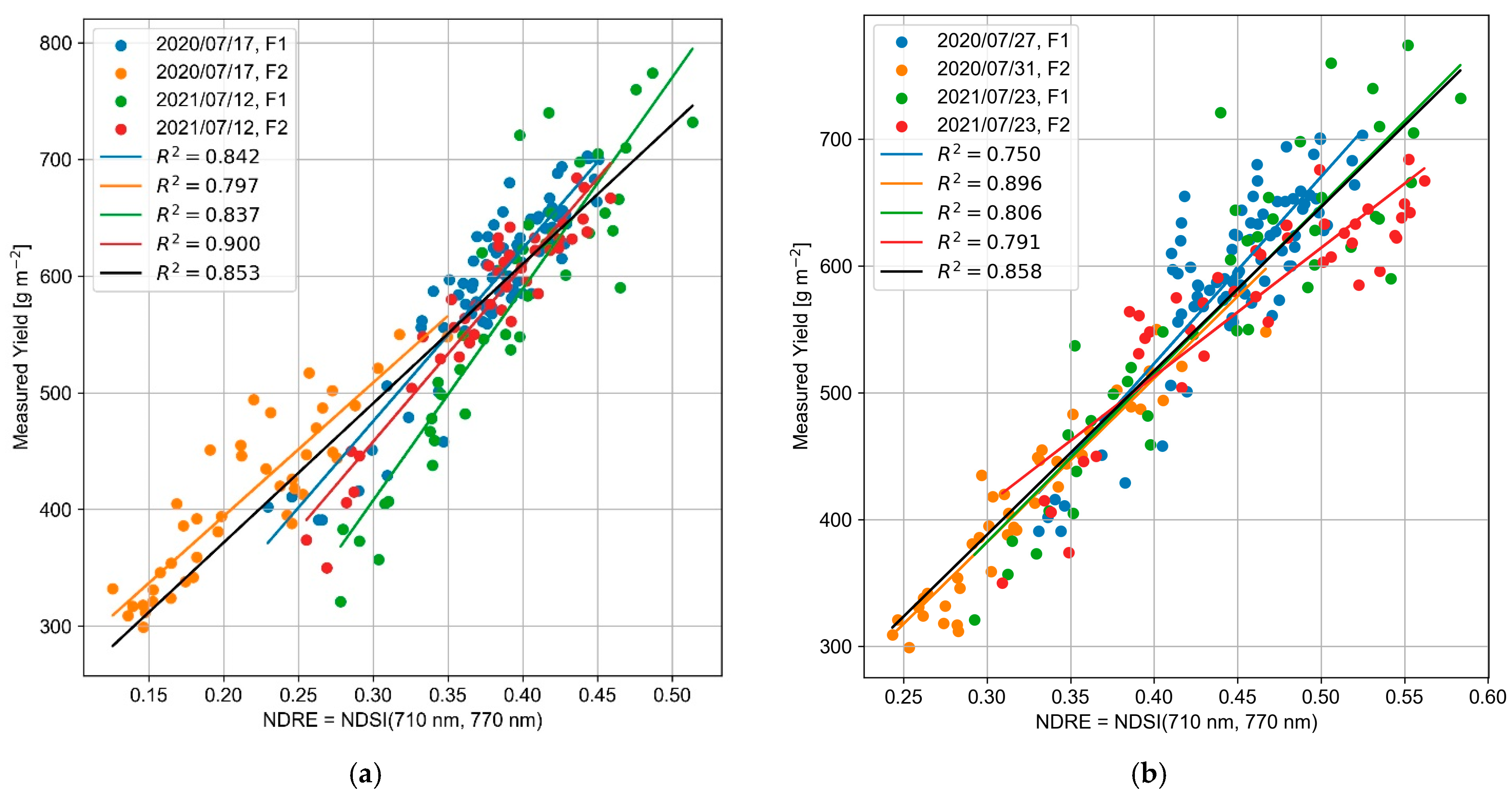
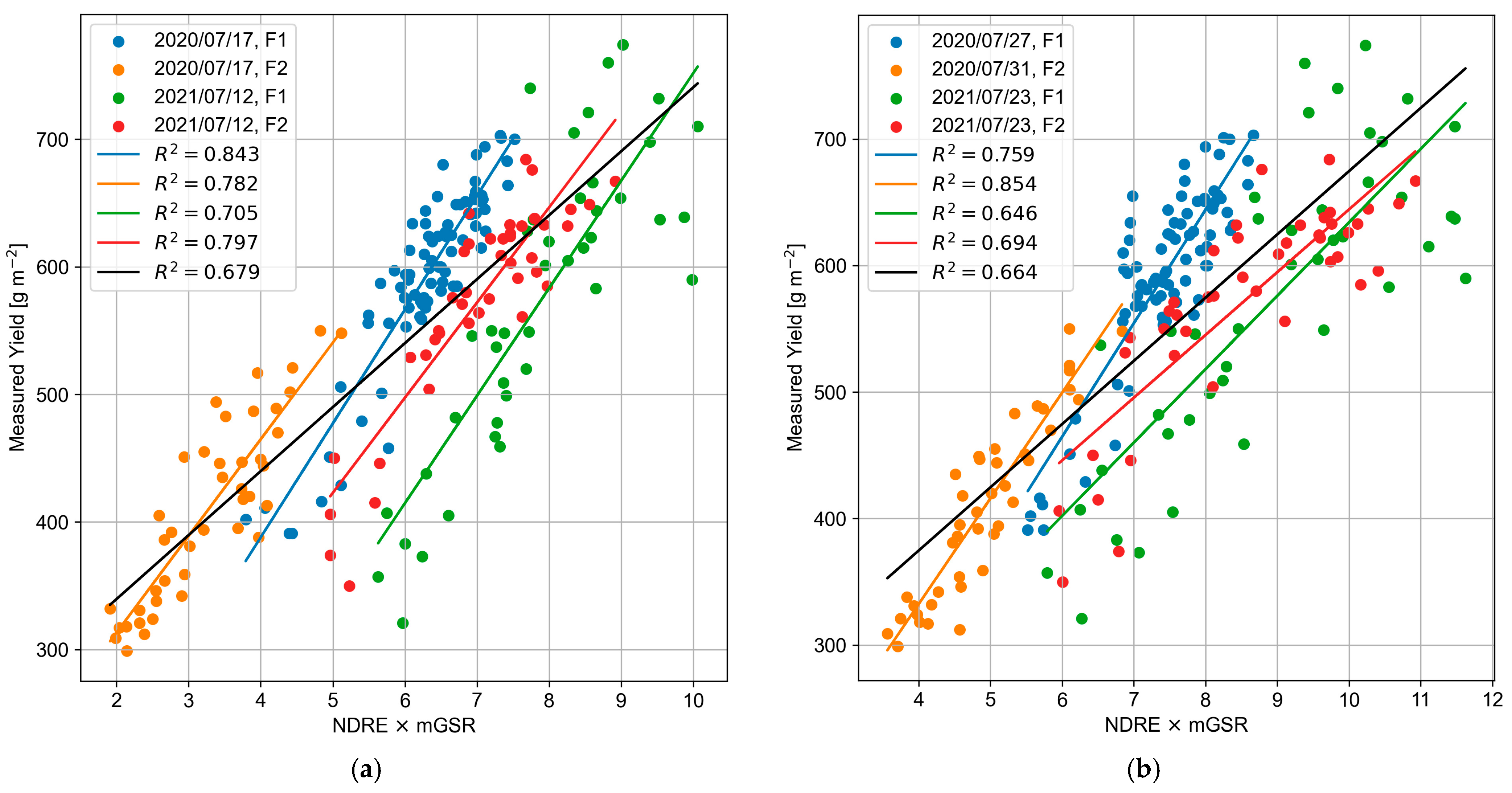
3.3. Spectral Regions with a High Prediction Accuracy
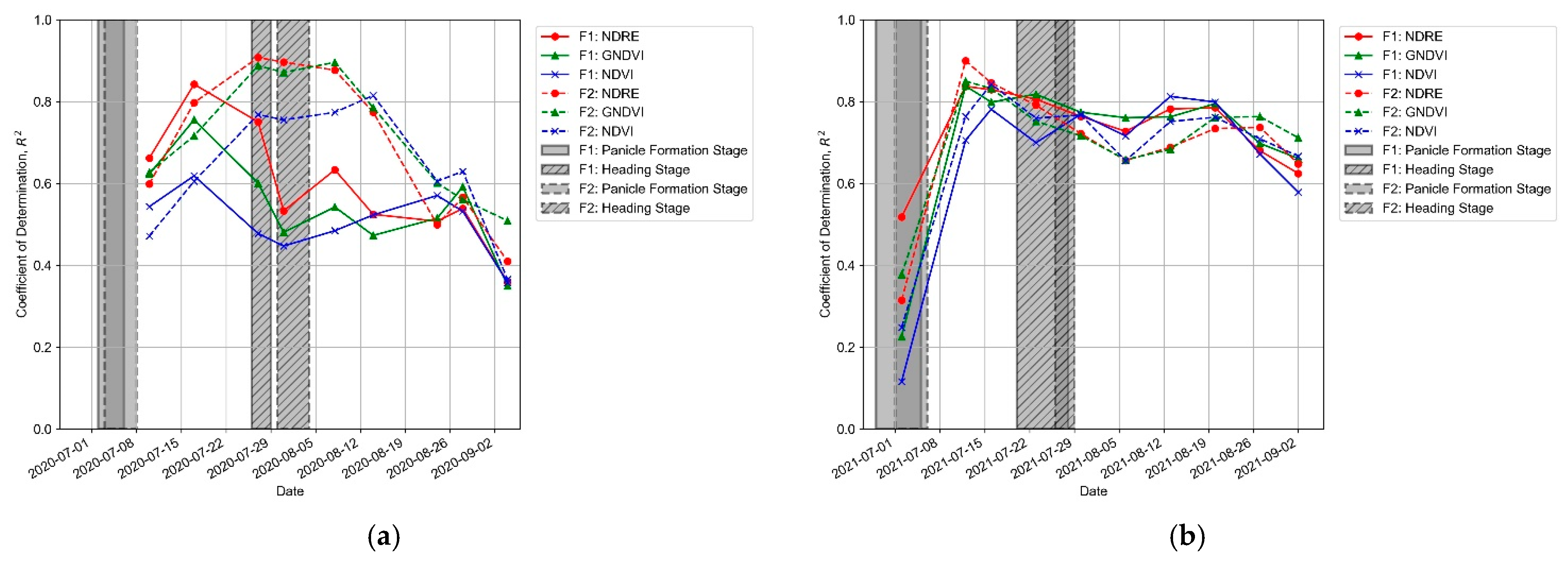
3.4. Time-Series Variation
3.5. Comparison of the Different Growth Environments
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- FAOSTAT. Food and Agriculture Organization of the United Nations, Rome. Available online: http://www.fao.org/faostat/ (accessed on 7 March 2022).
- Maclean, J.; Hardy, B.; Hettel, G. Rice Almanac, Source Book for One of the Most Important Economic Activities on Earth, 4th ed.; IRRI: Los Baños, Philippines, 2013. [Google Scholar]
- Matthews, R.; Wassmann, R. Modelling the Impacts of Climate Change and Methane Emission Reductions on Rice Production: A Review. Eur. J. Agron. 2003, 19, 573–598. [Google Scholar] [CrossRef]
- Chlingaryan, A.; Sukkarieh, S.; Whelan, B. Machine Learning Approaches for Crop Yield Prediction and Nitrogen Status Estimation in Precision Agriculture: A Review. Comput. Electron. Agric. 2018, 151, 61–69. [Google Scholar] [CrossRef]
- van Klompenburg, T.; Kassahun, A.; Catal, C. Crop Yield Prediction Using Machine Learning: A Systematic Literature Review. Comput. Electron. Agric. 2020, 177, 105709. [Google Scholar] [CrossRef]
- Kuenzer, C.; Knauer, K. Remote Sensing of Rice Crop Areas. Int. J. Remote Sens. 2013, 34, 2101–2139. [Google Scholar] [CrossRef]
- Mosleh, M.K.; Hassan, Q.K.; Chowdhury, E.H. Application of Remote Sensors in Mapping Rice Area and Forecasting Its Production: A Review. Sensors 2015, 15, 769–791. [Google Scholar] [CrossRef] [Green Version]
- Mulla, D.J. Twenty Five Years of Remote Sensing in Precision Agriculture: Key Advances and Remaining Knowledge Gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Lee, B.-W. Assessment of Rice Leaf Growth and Nitrogen Status by Hyperspectral Canopy Reflectance and Partial Least Square Regression. Eur. J. Agron. 2006, 24, 349–356. [Google Scholar] [CrossRef]
- Inoue, Y.; Peñuelas, J.; Miyata, A.; Mano, M. Normalized Difference Spectral Indices for Estimating Photosynthetic Efficiency and Capacity at a Canopy Scale Derived from Hyperspectral and CO2 Flux Measurements in Rice. Remote Sens. Environ. 2008, 112, 156–172. [Google Scholar] [CrossRef]
- Xie, X.; Li, Y.X.; Li, R.; Zhang, Y.; Huo, Y.; Bao, Y.; Shen, S. Hyperspectral Characteristics and Growth Monitoring of Rice (Oryza sativa) under Asymmetric Warming. Int. J. Remote Sens. 2013, 34, 8449–8462. [Google Scholar] [CrossRef]
- Tan, K.; Wang, S.; Song, Y.; Liu, Y.; Gong, Z. Estimating Nitrogen Status of Rice Canopy Using Hyperspectral Reflectance Combined with BPSO-SVR in Cold Region. Chemom. Intell. Lab. Syst. 2018, 172, 68–79. [Google Scholar] [CrossRef]
- An, G.; Xing, M.; He, B.; Liao, C.; Huang, X.; Shang, J.; Kang, H. Using Machine Learning for Estimating Rice Chlorophyll Content from In Situ Hyperspectral Data. Remote Sens. 2020, 12, 3104. [Google Scholar] [CrossRef]
- Inoue, Y.; Sakaiya, E.; Zhu, Y.; Takahashi, W. Diagnostic Mapping of Canopy Nitrogen Content in Rice Based on Hyperspectral Measurements. Remote Sens. Environ. 2012, 126, 210–221. [Google Scholar] [CrossRef]
- Ryu, C.; Suguri, M.; Umeda, M. Multivariate Analysis of Nitrogen Content for Rice at the Heading Stage Using Reflectance of Airborne Hyperspectral Remote Sensing. Field Crops Res. 2011, 122, 214–224. [Google Scholar] [CrossRef] [Green Version]
- Kawamura, K.; Ikeura, H.; Phongchanmaixay, S.; Khanthavong, P. Canopy Hyperspectral Sensing of Paddy Fields at the Booting Stage and PLS Regression Can Assess Grain Yield. Remote Sens. 2018, 10, 1249. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Stroppiana, D.; Migliazzi, M.; Chiarabini, V.; Crema, A.; Musanti, M.; Franchino, C.; Villa, P. Rice Yield Estimation Using Multispectral Data from UAV: A Preliminary Experiment in Northern Italy. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 4664–4667. [Google Scholar] [CrossRef]
- Teoh, C.; Nadzim, N.M.; Shahmihaizan, M.M.; Izani, I.M.K.; Faizal, K.; Shukry, H.M. Rice Yield Estimation Using Below Cloud Remote Sensing Images Acquired by Unmanned Airborne Vehicle System. Int. J. Adv. Sci. Eng. Inf. Technol. 2016, 6, 516–519. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Zheng, H.B.; Xu, X.Q.; He, J.Y.; Ge, X.K.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.X.; Tian, Y.C. Predicting Grain Yield in Rice Using Multi-Temporal Vegetation Indices from UAV-Based Multispectral and Digital Imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 246–255. [Google Scholar] [CrossRef]
- Guan, S.; Fukami, K.; Matsunaka, H.; Okami, M.; Tanaka, R.; Nakano, H.; Sakai, T.; Nakano, K.; Ohdan, H.; Takahashi, K. Assessing Correlation of High-Resolution NDVI with Fertilizer Application Level and Yield of Rice and Wheat Crops Using Small UAVs. Remote Sens. 2019, 11, 112. [Google Scholar] [CrossRef] [Green Version]
- Yang, Q.; Shi, L.; Han, J.; Zha, Y.; Zhu, P. Deep Convolutional Neural Networks for Rice Grain Yield Estimation at the Ripening Stage Using UAV-Based Remotely Sensed Images. Field Crops Res. 2019, 235, 142–153. [Google Scholar] [CrossRef]
- Hama, A.; Tanaka, K.; Mochizuki, A.; Tsuruoka, Y.; Kondoh, A. Improving the UAV-Based Yield Estimation of Paddy Rice by Using the Solar Radiation of Geostationary Satellite Himawari-8. Hydrol. Res. Lett. 2020, 14, 56–61. [Google Scholar] [CrossRef] [Green Version]
- Wan, L.; Cen, H.; Zhu, J.; Zhang, J.; Zhu, Y.; Sun, D.; Du, X.; Zhai, L.; Weng, H.; Li, Y.; et al. Grain Yield Prediction of Rice Using Multi-Temporal UAV-Based RGB and Multispectral Images and Model Transfer—A Case Study of Small Farmlands in the South of China. Agric. For. Meteorol. 2020, 291, 108096. [Google Scholar] [CrossRef]
- Goswami, S.; Choudhary, S.S.; Chatterjee, C.; Mailapalli, D.R.; Mishra, A.; Raghuwanshi, N.S. Estimation of Nitrogen Status and Yield of Rice Crop Using Unmanned Aerial Vehicle Equipped with Multispectral Camera. J. Appl. Remote Sens. 2021, 15, 042407. [Google Scholar] [CrossRef]
- Kang, Y.; Nam, J.; Kim, Y.; Lee, S.; Seong, D.; Jang, S.; Ryu, C. Assessment of Regression Models for Predicting Rice Yield and Protein Content Using Unmanned Aerial Vehicle-Based Multispectral Imagery. Remote Sens. 2021, 13, 1508. [Google Scholar] [CrossRef]
- Yuan, N.; Gong, Y.; Fang, S.; Liu, Y.; Duan, B.; Yang, K.; Wu, X.; Zhu, R. UAV Remote Sensing Estimation of Rice Yield Based on Adaptive Spectral Endmembers and Bilinear Mixing Model. Remote Sens. 2021, 13, 2190. [Google Scholar] [CrossRef]
- Wang, F.; Wang, F.; Zhang, Y.; Hu, J.; Huang, J.; Xie, J. Rice Yield Estimation Using Parcel-Level Relative Spectral Variables From UAV-Based Hyperspectral Imagery. Front. Plant Sci. 2019, 10, 453. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, F.; Yao, X.; Xie, L.; Zheng, J.; Xu, T. Rice Yield Estimation Based on Vegetation Index and Florescence Spectral Information from UAV Hyperspectral Remote Sensing. Remote Sens. 2021, 13, 3390. [Google Scholar] [CrossRef]
- Wang, F.; Yi, Q.; Hu, J.; Xie, L.; Yao, X.; Xu, T.; Zheng, J. Combining Spectral and Textural Information in UAV Hyperspectral Images to Estimate Rice Grain Yield. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102397. [Google Scholar] [CrossRef]
- Kurihara, J.; Ishida, T.; Takahashi, Y. Unmanned Aerial Vehicle (UAV)-Based Hyperspectral Imaging System for Precision Agriculture and Forest Management. In Unmanned Aerial Vehicle: Applications in Agriculture and Environment; Avtar, R., Watanabe, T., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 25–38. [Google Scholar] [CrossRef]
- Kurihara, J.; Koo, V.-C.; Guey, C.W.; Lee, Y.P.; Abidin, H. Early Detection of Basal Stem Rot Disease in Oil Palm Tree Using Unmanned Aerial Vehicle-Based Hyperspectral Imaging. Remote Sens. 2022, 14, 799. [Google Scholar] [CrossRef]
- Inoue, Y.; Guérif, M.; Baret, F.; Skidmore, A.; Gitelson, A.; Schlerf, M.; Darvishzadeh, R.; Olioso, A. Simple and Robust Methods for Remote Sensing of Canopy Chlorophyll Content: A Comparative Analysis of Hyperspectral Data for Different Types of Vegetation. Plant Cell Environ. 2016, 39, 2609–2623. [Google Scholar] [CrossRef] [Green Version]
- Ohno, H.; Sasaki, K.; Ohara, G.; Nakazono, K. Development of grid square air temperature and precipitation data compiled from observed, forecasted, and climatic normal data. Clim. Biosph. 2016, 16, 71–79. [Google Scholar] [CrossRef] [Green Version]
- Kominami, Y.; Sasaki, K.; Ohno, H. User’s Manual for The Agro-Meteorological Grid Square Data, NARO Ver.4. NARO, 2019, 67p. Available online: https://www.naro.go.jp/publicity_report/publication/files/mesh_agromet_manual_v4.pdf (accessed on 7 March 2022). (In Japanese).
- Barnes, E.M.; Clarke, T.R.; Richards, S.E.; Colaizzi, P.D.; Haberl, J.; Kostrzewski, M.; Waller, P.; Choi, C.; Riley, E.; Thompson, T.; et al. Coincident Detection of Crop Water Stress, Nitrogen Status, and Canopy Density Using Ground-Based Multispectral Data. In Proceedings of the 5th International Conference on Precision Agriculture and other resource management, Bloomington, MN, USA, 16–19 July 2000. [Google Scholar]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a Green Channel in Remote Sensing of Global Vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309–317. [Google Scholar]
- Fageria, N.K. Yield Physiology of Rice. J. Plant Nutr. 2007, 30, 843–879. [Google Scholar] [CrossRef]
- He, J.; Zhang, N.; Su, X.; Lu, J.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.; Tian, Y. Estimating Leaf Area Index with a New Vegetation Index Considering the Influence of Rice Panicles. Remote Sens. 2019, 11, 1809. [Google Scholar] [CrossRef] [Green Version]
- Tsukaguchi, T.; Kobayashi, H.; Fujihara, Y.; Chono, S. Estimation of Spikelet Number per Area by UAV-Acquired Vegetation Index in Rice (Oryza sativa L.). Plant Prod. Sci. 2022, 25, 20–29. [Google Scholar] [CrossRef]
- Rehman, T.H.; Lundy, M.E.; Linquist, B.A. Comparative Sensitivity of Vegetation Indices Measured via Proximal and Aerial Sensors for Assessing N Status and Predicting Grain Yield in Rice Cropping Systems. Remote Sens. 2022, 14, 2770. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Field | Number of Plots | Transplanting Date | Panicle Formation Stage | Heading Stage |
|---|---|---|---|---|---|
| 2020 | F1 | 80 (10 × 8) | 22 May 2020 | 2–6 July 2020 | 26–29 July 2020 |
| F2 | 42 (7 × 6) | 3 June 2020 | 3–8 July 2020 | 30 July–4 August 2020 | |
| 2021 | F1 | 42 (7 × 6) | 20 May 2021 | 28 June–5 July 2021 | 20–28 July 2021 |
| F2 | 42 (7 × 6) | 31 May 2021 | 1–6 July 2021 | 26–29 July 2021 |
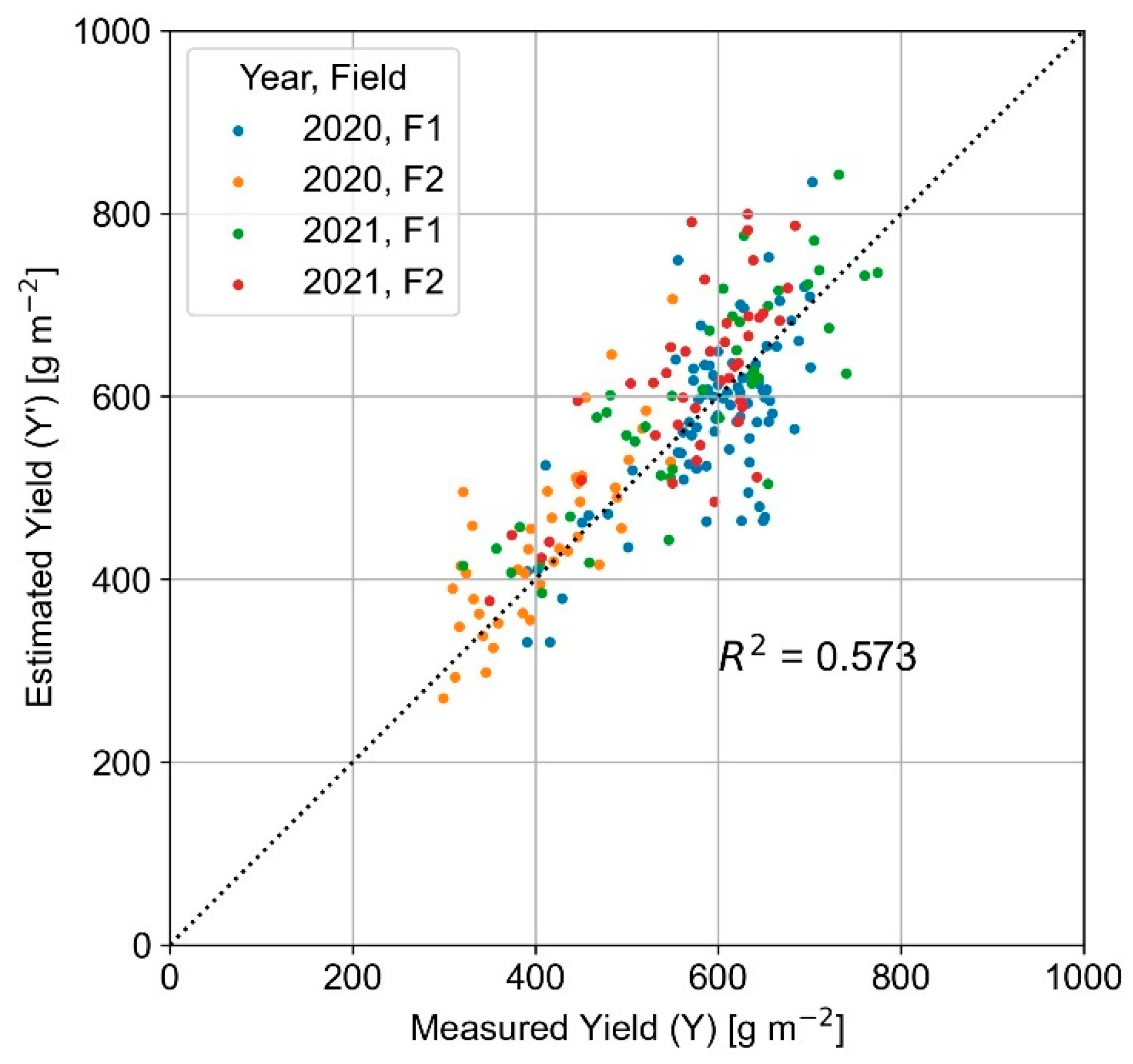
| Stage | Slope | Intercept | R2 | RMSE [g m−2] | RMSPE [%] |
|---|---|---|---|---|---|
| Booting | 1193.8 | 132.8 | 0.853 | 42.3 | 9.22 |
| Heading | 1291.5 | 0.6 | 0.858 | 41.5 | 7.52 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kurihara, J.; Nagata, T.; Tomiyama, H. Rice Yield Prediction in Different Growth Environments Using Unmanned Aerial Vehicle-Based Hyperspectral Imaging. Remote Sens. 2023, 15, 2004. https://doi.org/10.3390/rs15082004
Kurihara J, Nagata T, Tomiyama H. Rice Yield Prediction in Different Growth Environments Using Unmanned Aerial Vehicle-Based Hyperspectral Imaging. Remote Sensing. 2023; 15(8):2004. https://doi.org/10.3390/rs15082004
Chicago/Turabian StyleKurihara, Junichi, Toru Nagata, and Hiroyuki Tomiyama. 2023. "Rice Yield Prediction in Different Growth Environments Using Unmanned Aerial Vehicle-Based Hyperspectral Imaging" Remote Sensing 15, no. 8: 2004. https://doi.org/10.3390/rs15082004