
Towards Edge-Precise Cloud and Shadow Detection on the GaoFen-1 Dataset: A Visual, Comprehensive Investigation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Label-transferring solution to the GF1 segmentation problem: we present a label-transferring solution to the GF1 segmentation problem by considering that the segmentor can be directly applicable to the custom, band-consistent test cases from the GF1 data if it is sufficiently trained on the well-labeled samples of common bands drawn from the L8 dataset.
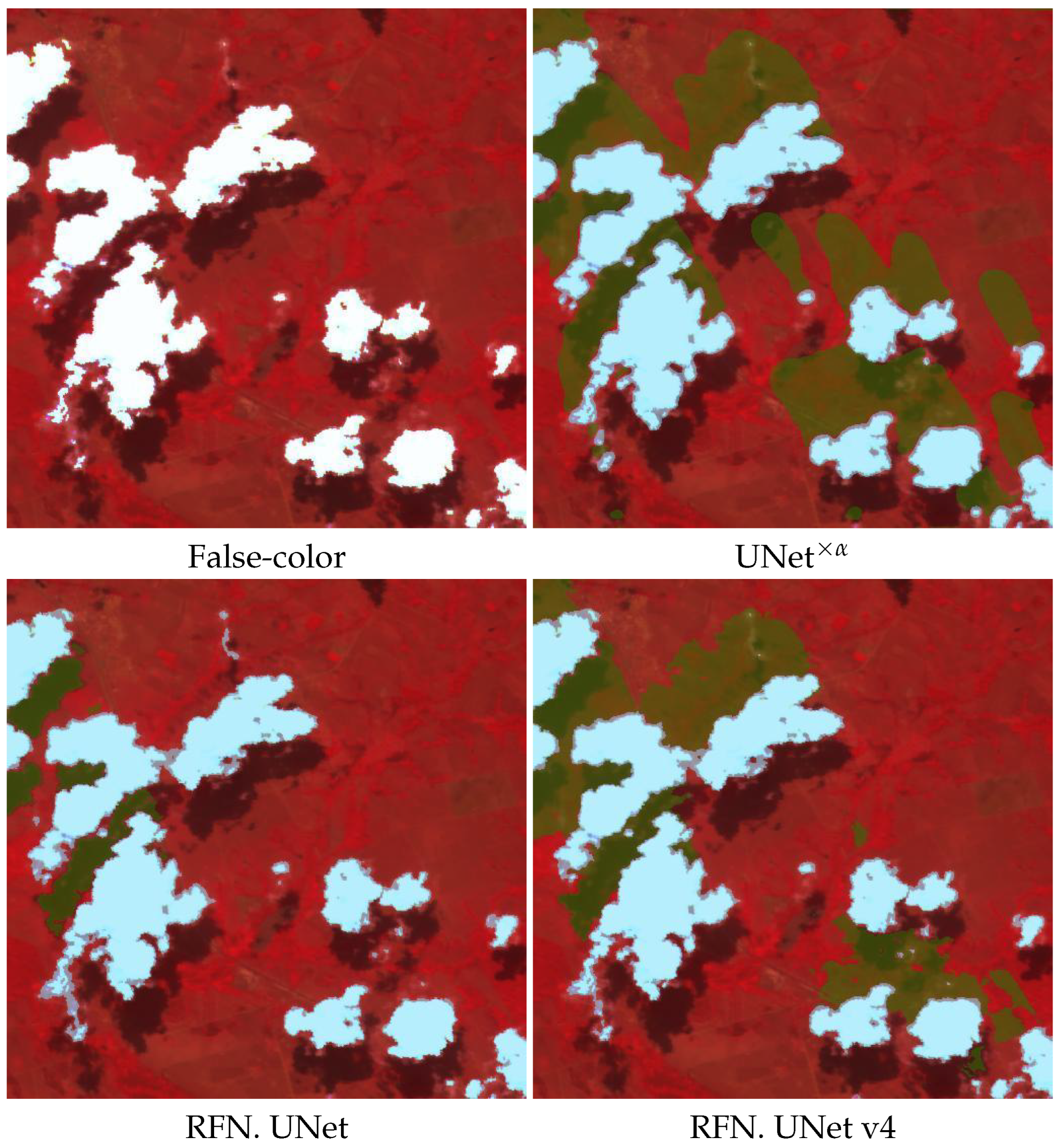
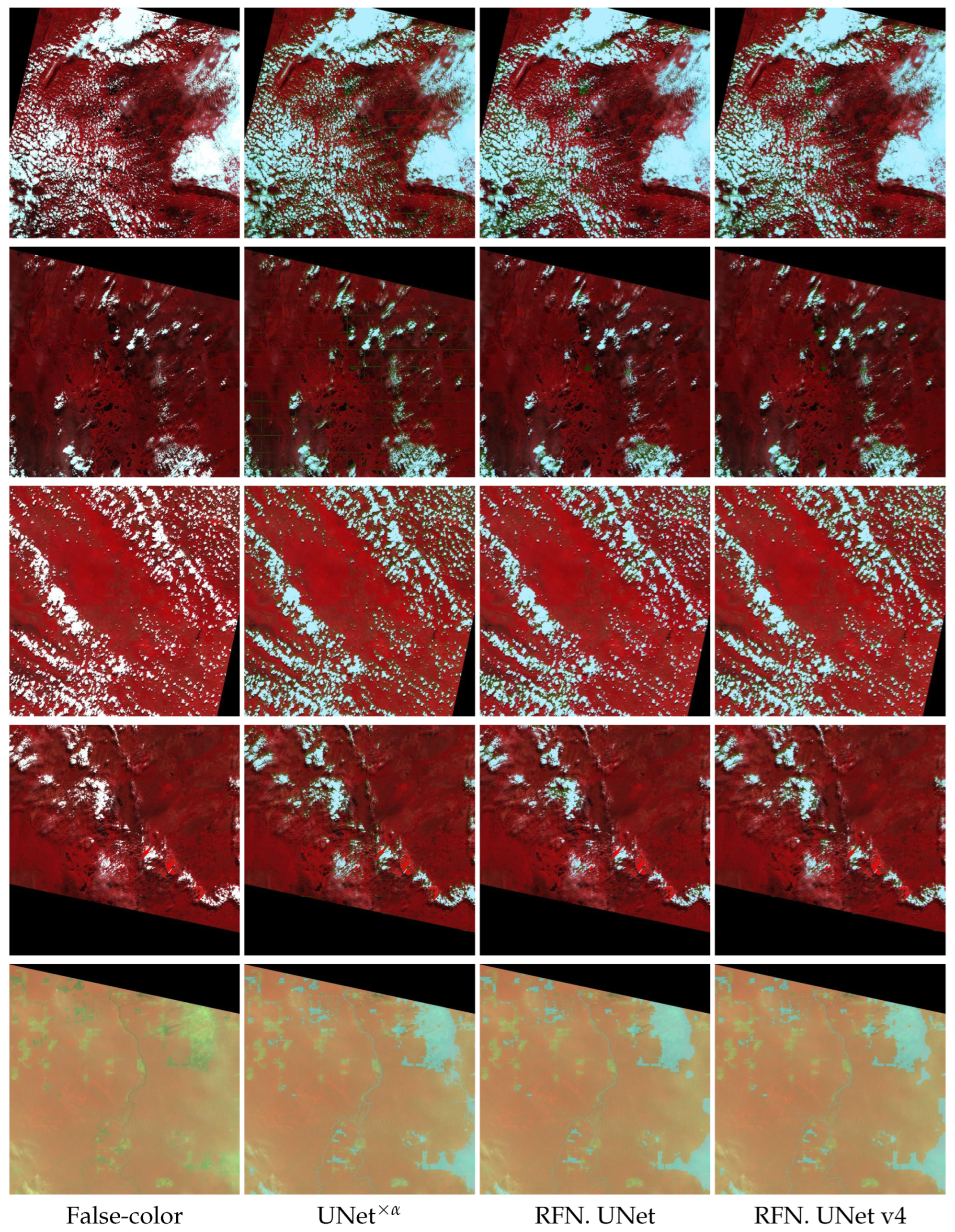
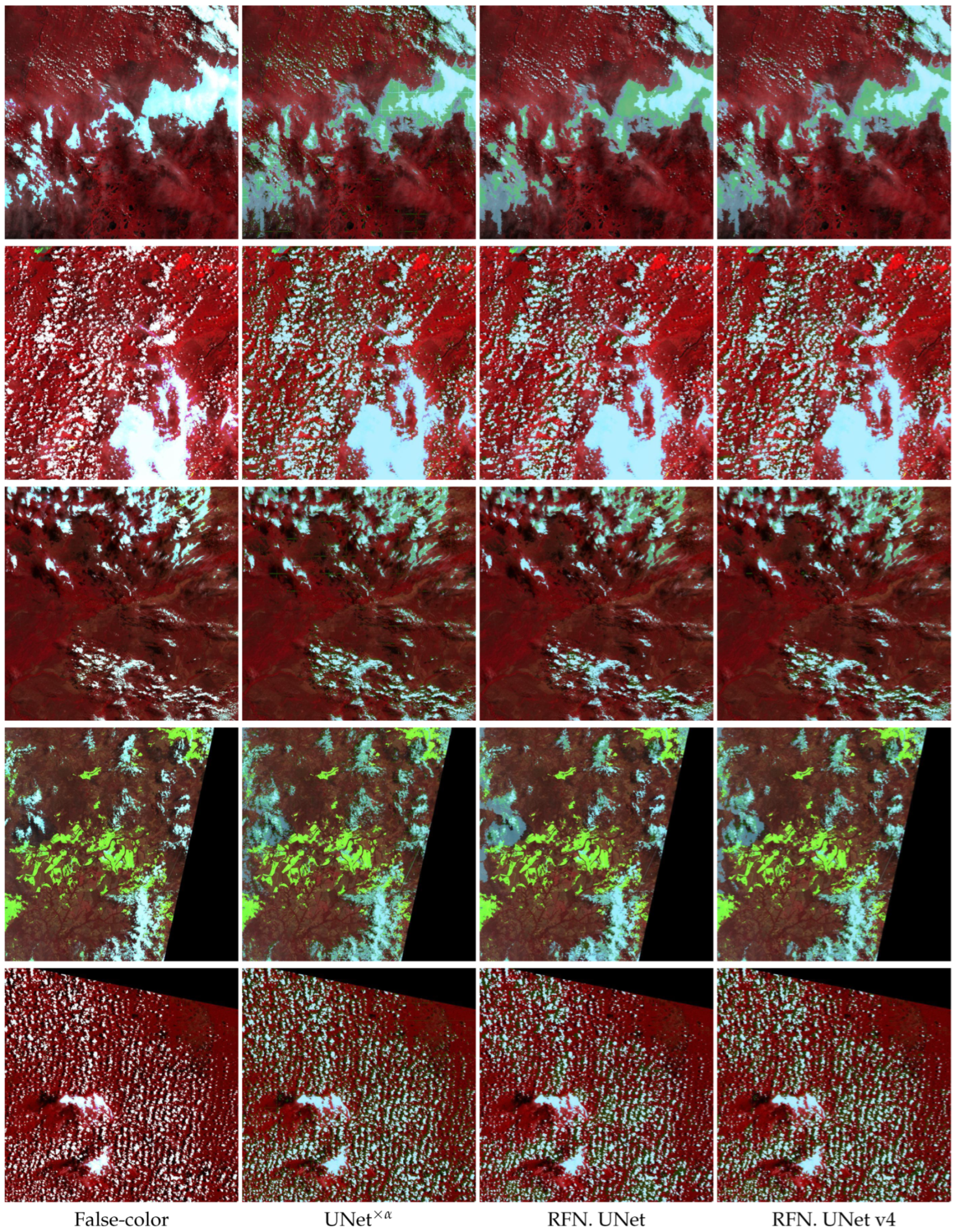
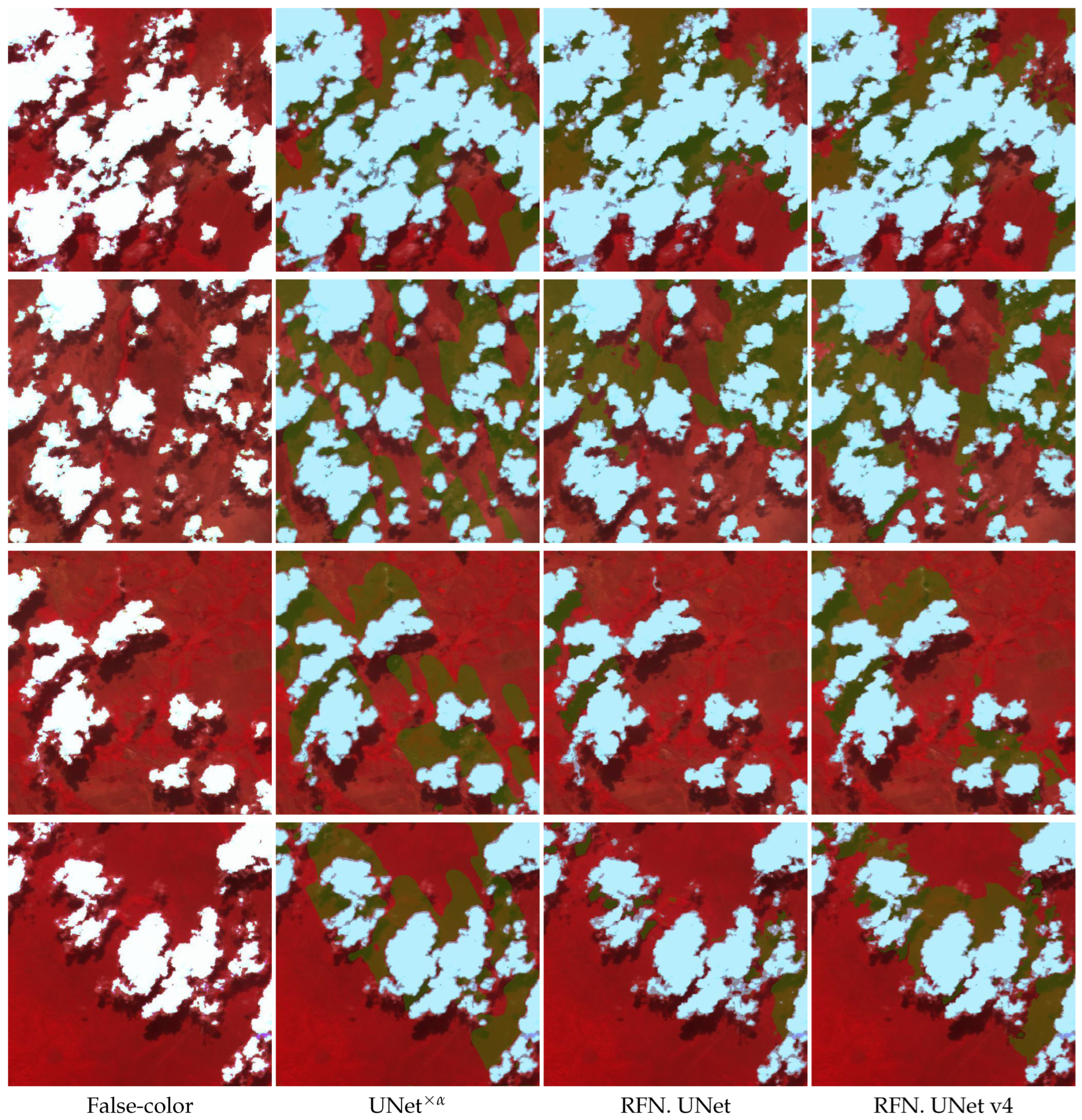
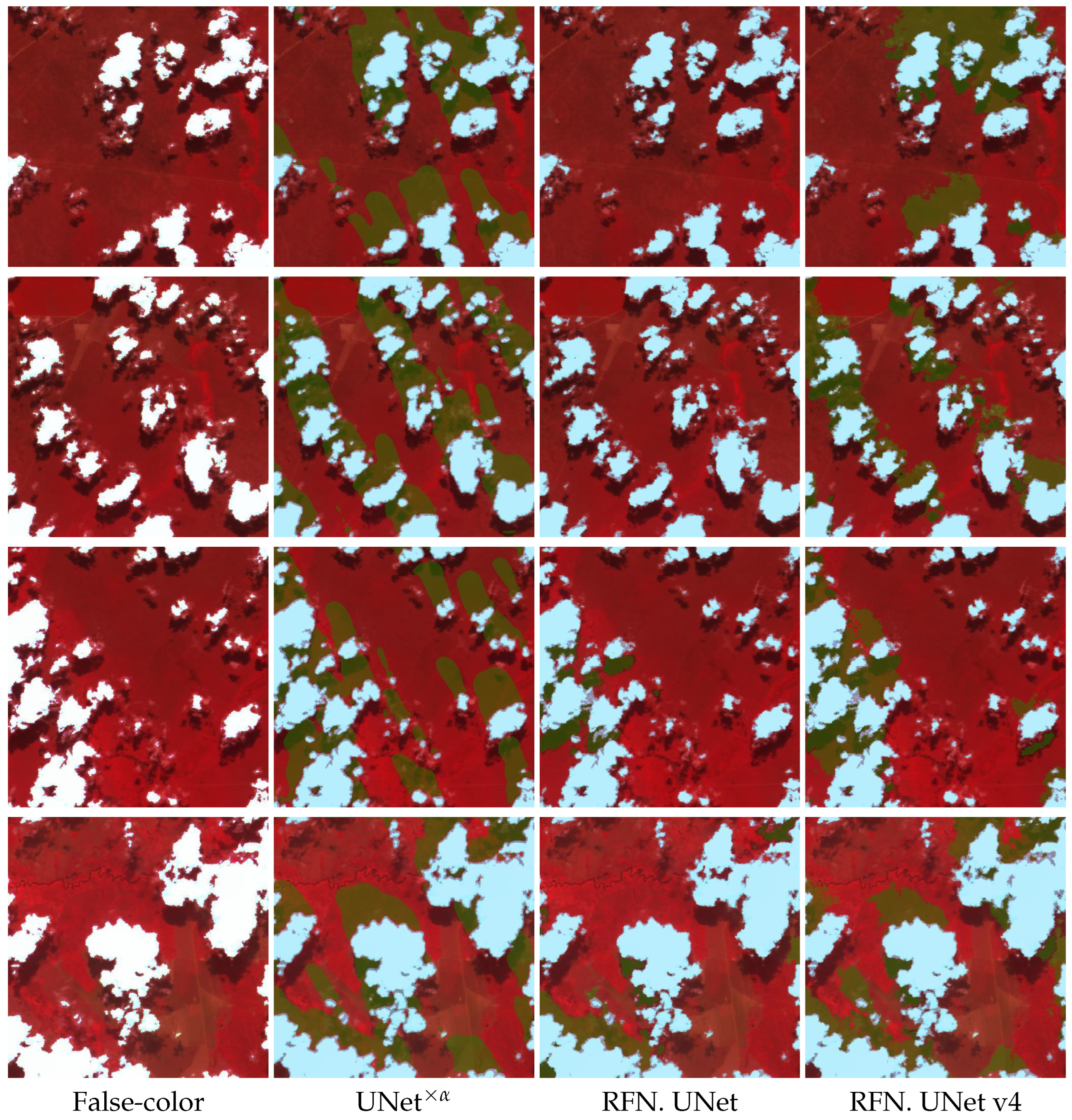
- Deployment of the Refined UNets on the custom GF1 datasets: we achieve edge-refined segmentation performance on the custom GF1 data by adopting our Refined UNet and v4.
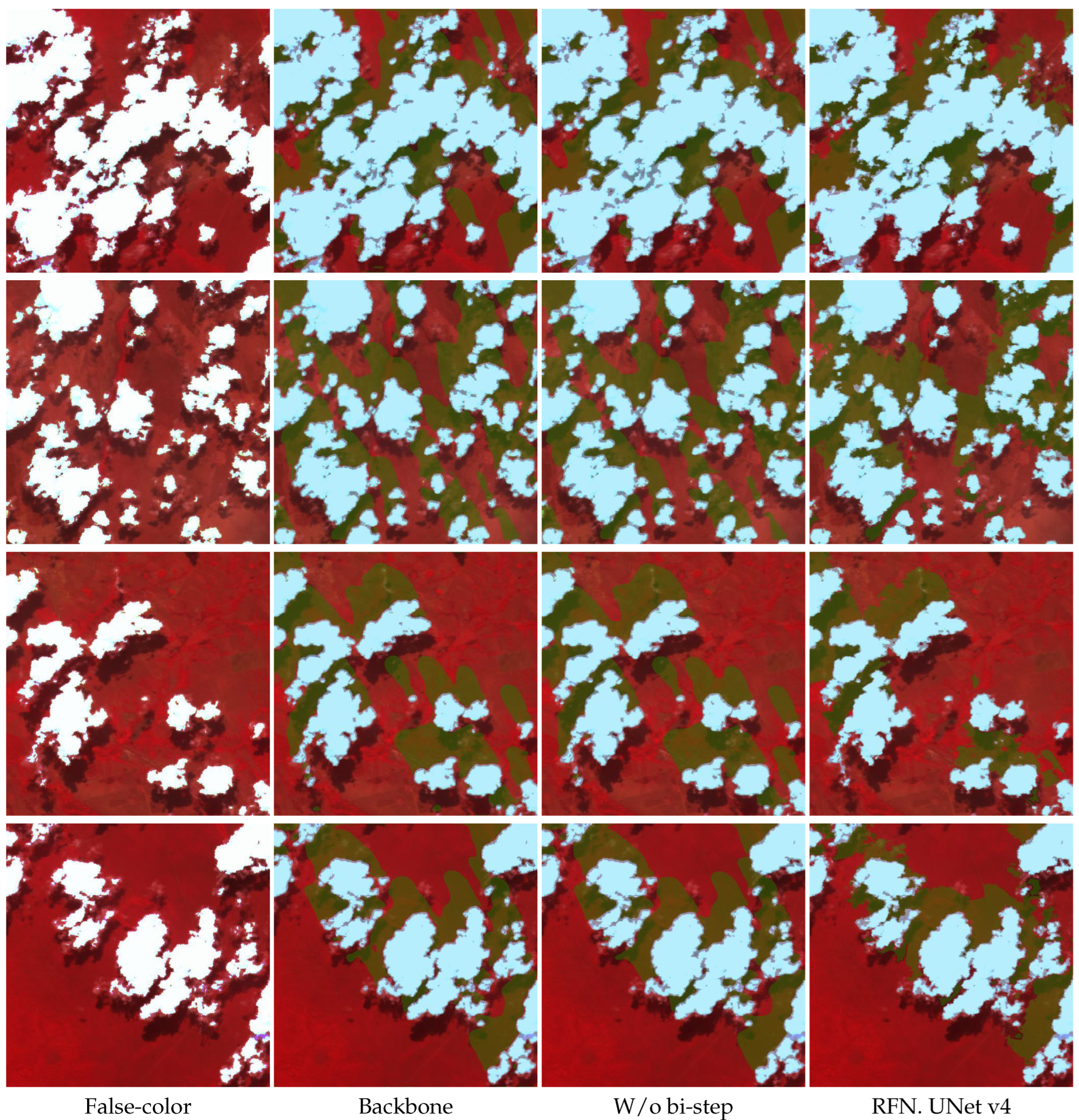
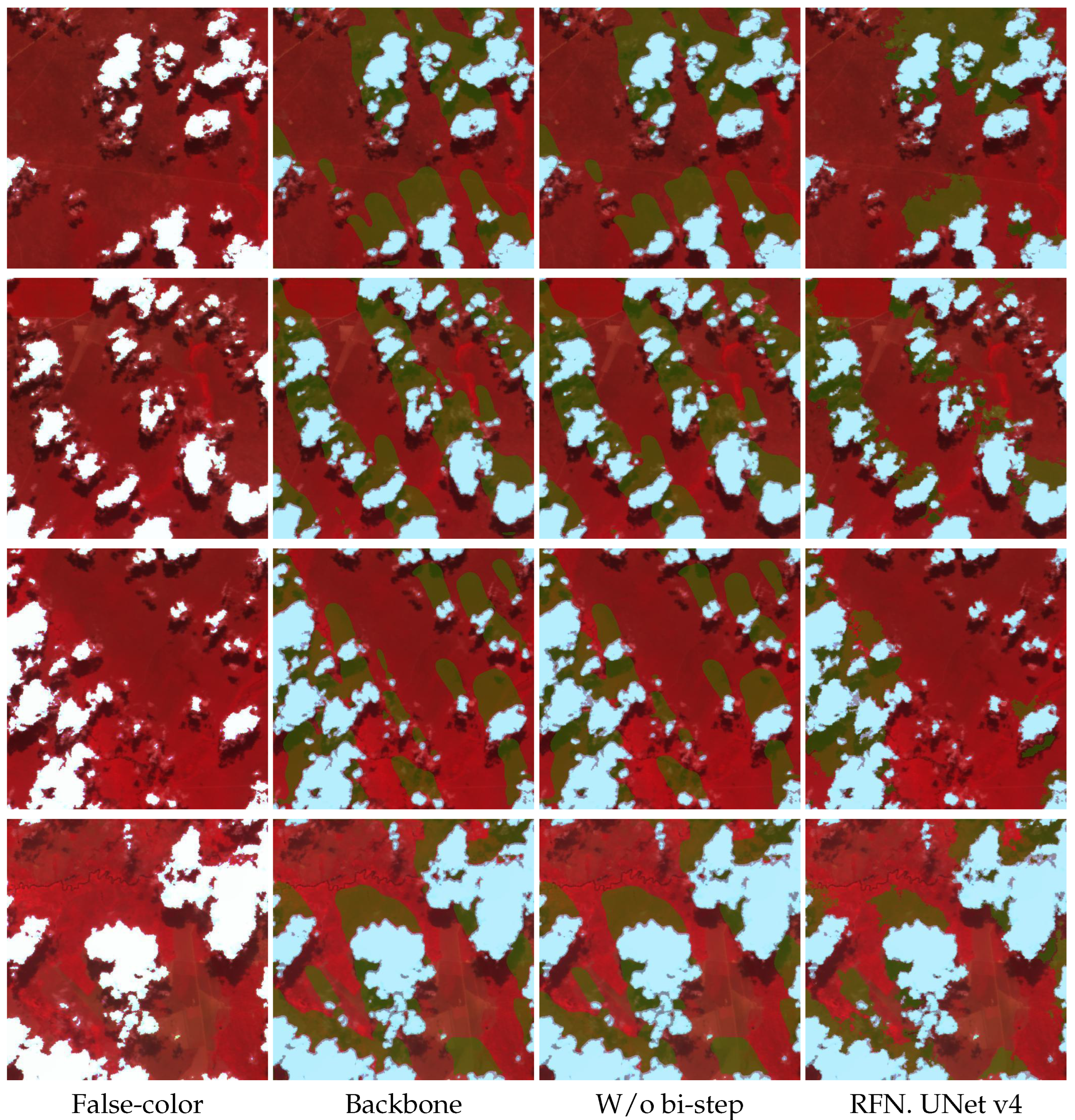
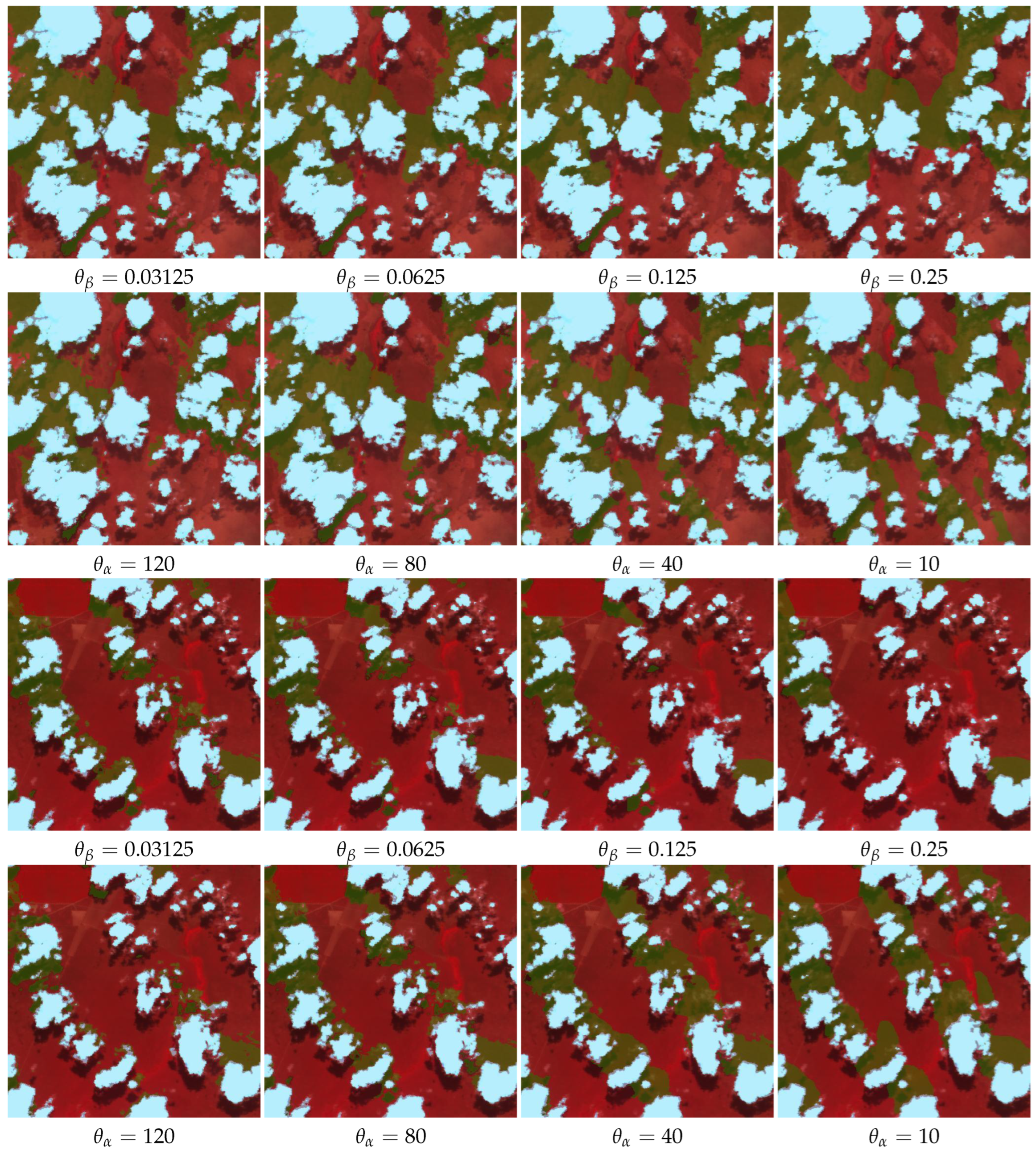
- Comprehensive investigation into the edge-precise GF1 segmentation solution: we confirm our edge-refined achievements on the GF1 data by performing a relatively visual, comprehensive investigation, including visual comparisons, ablation experiments regarding bilateral manipulations, explorations of critical hyperparameters within our CRF, and time consumption in practice.
2. Related Work
3. Instantiating Refined UNets on the Custom GF1 Dataset
3.1. Inference of Refined UNets Revisited
3.2. Details Regarding Model Deployment
4. Experiments and Discussions
4.1. Experiment Setup
- GF1WFV4.16m.2020271224917.20LQQ.FAGUO1.SR.tiff,
- GF1WFV1.16m.2014127221306.21KVB.FAGUO1.SR.tiff,
- GF1WFV1.16m.2014164221646.21KVB.FAGUO1.SR.tiff,
- GF1WFV1.16m.2014267223114.21LTD.FAGUO1.SR.tiff,
- GF1WFV2.16m.2017241224210.21KVB.FAGUO1.SR.tiff,
- GF1WFV2.16m.2020262223057.20LQQ.FAGUO1.SR.tiff,
- GF1WFV4.16m.2014128223630.21KVB.FAGUO1.SR.tiff,
- GF1WFV4.16m.2017352224828.21KXB.FAGUO1.SR.tiff,
- GF1WFV4.16m.2019241223346.21KXB.FAGUO1.SR.tiff,
- GF1WFV4.16m.2020261220853.21KZB.FAGUO1.SR.tiff.
4.2. Visual Efficacy of Edge-Refining Techniques
4.3. Ablation Study Regarding Edge Refinement
4.4. Visual Effect of Critical Hyperparameters
4.5. Time Consumption in Practice
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chai, D.; Newsam, S.; Zhang, H.K.; Qiu, Y.; Huang, J. Cloud and cloud shadow detection in Landsat imagery based on deep convolutional neural networks. Remote. Sens. Environ. 2019, 225, 307–316. [Google Scholar] [CrossRef]
- Jiao, L.; Huo, L.; Hu, C.; Tang, P.; Zhang, Z. Refined UNet V4: End-to-End Patch-Wise Network for Cloud and Shadow Segmentation with Bilateral Grid. Remote. Sens. 2022, 14, 358. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote. Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef] [PubMed]
- Lin, D.; Xu, G.; Wang, X.; Wang, Y.; Sun, X.; Fu, K. A remote sensing image dataset for cloud removal. arXiv 2019, arXiv:1901.00600. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention (MICCAI), Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Shen, H.; Li, H.; Xia, G.; Gamba, P.; Zhang, L. Multi-feature combined cloud and cloud shadow detection in GaoFen-1 wide field of view imagery. Remote. Sens. Environ. 2017, 191, 342–358. [Google Scholar] [CrossRef]
- Khoshboresh-Masouleh, M.; Shah-Hosseini, R. A deep learning method for near-real-time cloud and cloud shadow segmentation from gaofen-1 images. Comput. Intell. Neurosci. 2020, 2020, 8811630. [Google Scholar] [CrossRef] [PubMed]
- Shelhamer, E.; Long, J.; Darrell, T. Fully convolutional networks for semantic segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 640–651. [Google Scholar] [CrossRef] [PubMed]
- Kendall, A.; Badrinarayanan, V.; Cipolla, R. Bayesian SegNet: Model Uncertainty in Deep Convolutional Encoder-Decoder Architectures for Scene Understanding. In Proceedings of the British Machine Vision Conference (BMVC), London, UK, 4–7 September 2017; pp. 57.1–57.12. [Google Scholar]
- Lin, G.; Milan, A.; Shen, C.; Reid, I. Refinenet: Multi-path refinement networks for high-resolution semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1925–1934. [Google Scholar]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2881–2890. [Google Scholar]
- Wu, H.; Zhang, J.; Huang, K.; Liang, K.; Yu, Y. FastFCN: Rethinking dilated convolution in the backbone for semantic segmentation. arXiv 2019, arXiv:1903.11816. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking atrous convolution for semantic image segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Wang, P.; Chen, P.; Yuan, Y.; Liu, D.; Huang, Z.; Hou, X.; Cottrell, G. Understanding convolution for semantic segmentation. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, NV, USA, 12–15 March 2018; pp. 1451–1460. [Google Scholar]
- Chen, L.C.; Yang, Y.; Wang, J.; Xu, W.; Yuille, A.L. Attention to scale: Scale-aware semantic image segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3640–3649. [Google Scholar]
- Farabet, C.; Couprie, C.; Najman, L.; LeCun, Y. Learning hierarchical features for scene labeling. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1915–1929. [Google Scholar] [CrossRef] [PubMed]
- Mostajabi, M.; Yadollahpour, P.; Shakhnarovich, G. Feedforward semantic segmentation with zoom-out features. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3376–3385. [Google Scholar]
- Zhang, H.; Dana, K.; Shi, J.; Zhang, Z.; Wang, X.; Tyagi, A.; Agrawal, A. Context encoding for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 7151–7160. [Google Scholar]
- Zhang, H.; Patel, V.M. Densely connected pyramid dehazing network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 3194–3203. [Google Scholar]
- Kirillov, A.; Wu, Y.; He, K.; Girshick, R. Pointrend: Image segmentation as rendering. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 9799–9808. [Google Scholar]
- Yuan, Y.; Xie, J.; Chen, X.; Wang, J. Segfix: Model-agnostic boundary refinement for segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Glasgow, UK, 23–28 August 2020; pp. 489–506. [Google Scholar]
- Zhou, P.; Price, B.; Cohen, S.; Wilensky, G.; Davis, L.S. Deepstrip: High-resolution boundary refinement. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 10558–10567. [Google Scholar]
- Tang, C.; Chen, H.; Li, X.; Li, J.; Zhang, Z.; Hu, X. Look closer to segment better: Boundary patch refinement for instance segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 19–25 June 2021; pp. 13926–13935. [Google Scholar]
- Borse, S.; Wang, Y.; Zhang, Y.; Porikli, F. Inverseform: A loss function for structured boundary-aware segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 19–25 June 2021; pp. 5901–5911. [Google Scholar]
- Li, K.; Hariharan, B.; Malik, J. Iterative instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3659–3667. [Google Scholar]
- Cheng, H.K.; Chung, J.; Tai, Y.W.; Tang, C.K. Cascadepsp: Toward class-agnostic and very high-resolution segmentation via global and local refinement. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 8890–8899. [Google Scholar]
- Huynh, C.; Tran, A.T.; Luu, K.; Hoai, M. Progressive semantic segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 19–25 June 2021; pp. 16755–16764. [Google Scholar]
- Lin, G.; Shen, C.; Van Den Hengel, A.; Reid, I. Efficient piecewise training of deep structured models for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 3194–3203. [Google Scholar]
- Krähenbühl, P.; Koltun, V. Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials. In Proceedings of the Advances in Neural Information Processing Systems, Granada, Spain, 12–14 December 2011; pp. 109–117. [Google Scholar]
- Krähenbühl, P.; Koltun, V. Parameter learning and convergent inference for dense random fields. In Proceedings of the International Conference on Machine Learning (ICML), Atlanta, GA, USA, 17–19 June 2013; pp. 513–521. [Google Scholar]
- Liu, Z.; Li, X.; Luo, P.; Loy, C.C.; Tang, X. Semantic image segmentation via deep parsing network. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 11–18 December 2015; pp. 1377–1385. [Google Scholar]
- He, X.; Zemel, R.S.; Carreira-Perpinán, M.A. Multiscale conditional random fields for image labeling. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Washington, DC, USA, 27 June–2 July 2004; pp. II–695–II–702. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Guided Image Filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1397–1409. [Google Scholar] [CrossRef] [PubMed]
- Zheng, S.; Jayasumana, S.; Romera-Paredes, B.; Vineet, V.; Su, Z.; Du, D.; Huang, C.; Torr, P.H. Conditional random fields as recurrent neural networks. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 11–18 December 2015; pp. 1529–1537. [Google Scholar]
- Wu, H.; Zheng, S.; Zhang, J.; Huang, K. Fast end-to-end trainable guided filter. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 1838–1847. [Google Scholar]
- Jiao, L.; Huo, L.; Hu, C.; Tang, P. Refined UNet: UNet-based refinement network for cloud and shadow precise segmentation. Remote. Sens. 2020, 12, 2001. [Google Scholar] [CrossRef]
- Jiao, L.; Huo, L.; Hu, C.; Tang, P. Refined UNet V2: End-to-End Patch-Wise Network for Noise-Free Cloud and Shadow Segmentation. Remote. Sens. 2020, 12, 3530. [Google Scholar] [CrossRef]
- Jiao, L.; Huo, L.; Hu, C.; Tang, P. Refined UNet v3: Efficient end-to-end patch-wise network for cloud and shadow segmentation with multi-channel spectral features. Neural Netw. 2021, 143, 767–782. [Google Scholar] [CrossRef] [PubMed]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. 2015. Available online: tensorflow.org (accessed on 27 October 2020).









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, L.; Zheng, M.; Tang, P.; Zhang, Z. Towards Edge-Precise Cloud and Shadow Detection on the GaoFen-1 Dataset: A Visual, Comprehensive Investigation. Remote Sens. 2023, 15, 906. https://doi.org/10.3390/rs15040906
Jiao L, Zheng M, Tang P, Zhang Z. Towards Edge-Precise Cloud and Shadow Detection on the GaoFen-1 Dataset: A Visual, Comprehensive Investigation. Remote Sensing. 2023; 15(4):906. https://doi.org/10.3390/rs15040906
Chicago/Turabian StyleJiao, Libin, Mocun Zheng, Ping Tang, and Zheng Zhang. 2023. "Towards Edge-Precise Cloud and Shadow Detection on the GaoFen-1 Dataset: A Visual, Comprehensive Investigation" Remote Sensing 15, no. 4: 906. https://doi.org/10.3390/rs15040906