

Automatic Identification of Earth Rock Embankment Piping Hazards in Small and Medium Rivers Based on UAV Thermal Infrared and Visible Images
 ,
,
Abstract
:1. Introduction
2. Framework and Methods
2.1. Framework
2.2. TIR & V-Images-Based Technical Route of Earth Rock Embankment Piping Identification
2.3. Identification Method
2.3.1. Random Forest Classification of Visible Images
2.3.2. Determination of Reference Temperature of Ground Objects in Thermal Infrared Images
2.3.3. Registration and Automatic Identifications
2.4. Evaluation Metrics for Piping Image Identification
- (1)
- Confusion Matrix
- (2)
- Accuracy
- (3)
- Precision
- (4)
- Recall
3. Results and Analysis
3.1. Field Simulation Experiment
3.1.1. Piping Simulation Experiment Preparation and Data Acquisition
3.1.2. Analysis of Characteristics of Piping Temperature Field and Classification Images
3.2. Field Test
3.2.1. UAV Data Acquisition and Preprocessing
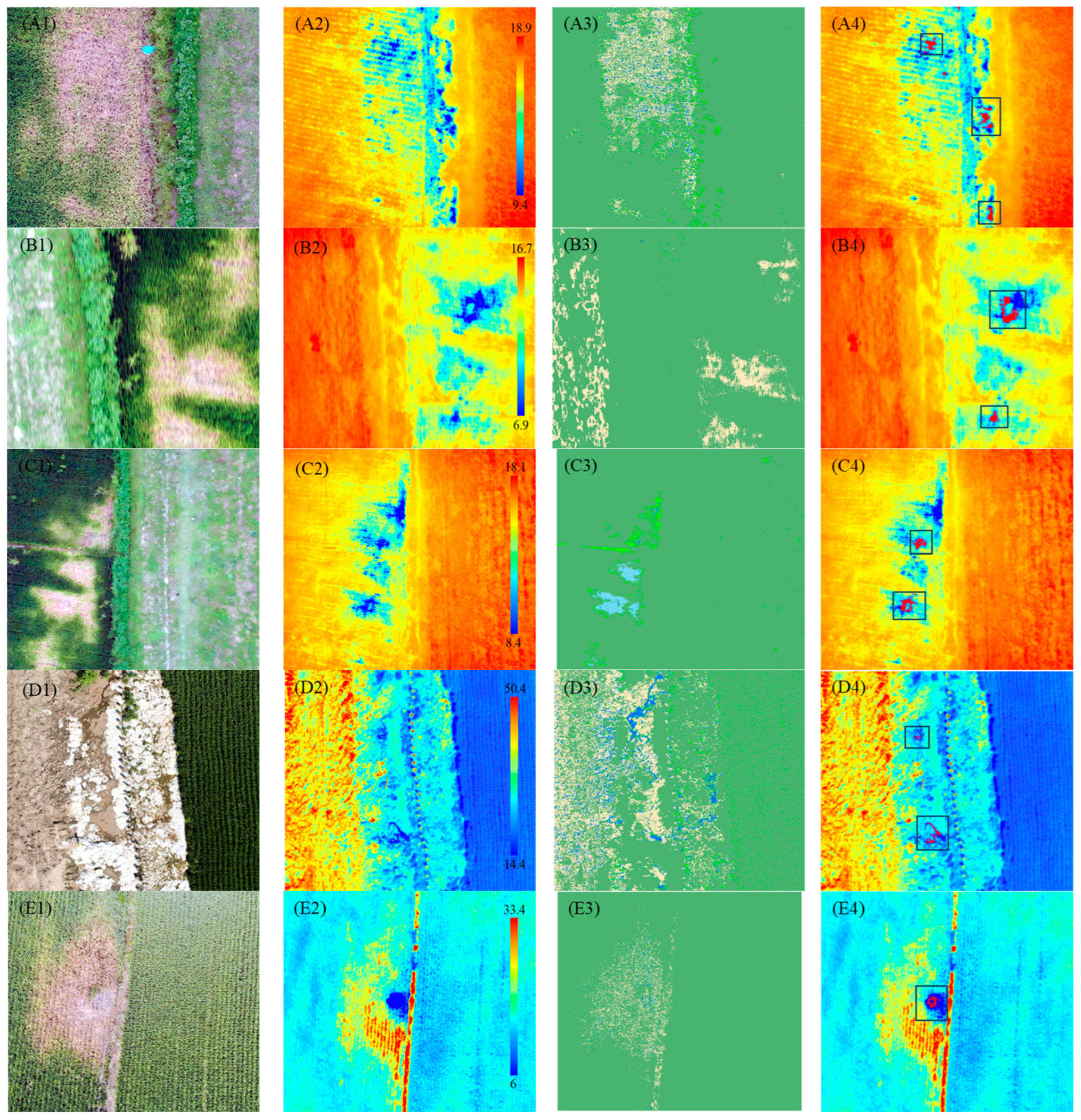
3.2.2. Identification and Analysis of Field Test Results for Piping Hazards
4. Discussion and Conclusions
4.1. Discussion on Uncertainty of Test Results
4.2. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lehner, B.; Grill, G. Global river hydrography and network routing: Baseline data and new approaches to study the world’s large river systems. Hydrol. Process. 2013, 27, 2171–2186. [Google Scholar] [CrossRef]
- Su, Y.; Li, W.; Liu, L.; Hu, W.; Li, J.; Sun, X.; Li, Y. Health assessment of small-to-medium sized rivers: Comparison between comprehensive indicator method and biological monitoring method. Ecol. Indic. 2021, 126, 107686. [Google Scholar] [CrossRef]
- Zhang, X.-R.; Zhang, D.-R.; Ding, Y. An environmental flow method applied in small and medium-sized mountainous rivers. Water Sci. Eng. 2021, 14, 323–329. [Google Scholar] [CrossRef]
- Jia, H.; Chen, F.; Pan, D.; Du, E.; Wang, L.; Wang, N.; Yang, A. Flood risk management in the Yangtze River basin—Comparison of 1998 and 2020 events. Int. J. Disaster Risk Reduct. 2022, 68, 102724. [Google Scholar] [CrossRef]
- Kong, F.; Sun, S. Better understanding the catastrophe risk in interconnection and comprehensive disaster risk defense capability, with special reference to China. Sustainability 2021, 13, 1793. [Google Scholar] [CrossRef]
- Zhou, R.; Wen, Z.; Su, H. Automatic recognition of earth rock embankment leakage based on UAV passive infrared thermography and deep learning. ISPRS J. Photogramm. Remote Sens. 2022, 191, 85–104. [Google Scholar] [CrossRef]
- Zhou, R.; Wen, Z.; Su, H. Detect submerged piping in river embankment by passive infrared thermography. Measurement 2022, 202, 111873. [Google Scholar] [CrossRef]
- Cramer, W.; Guiot, J.; Fader, M.; Garrabou, J.; Gattuso, J.P.; Iglesias, A.; Xoplaki, E. Climate change and interconnected risks to sustainable development in the Mediterranean. Nat. Clim. Change 2018, 8, 972–980. [Google Scholar] [CrossRef]
- Adedeji, O.H.; Odufuwa, B.O.; Adebayo, O.H. Building capabilities for flood disaster and hazard preparedness and risk reduction in Nigeria: Need for spatial planning and land management. J. Sustain. Dev. Afr. 2012, 14, 45–58. [Google Scholar]
- Cafiso, S.; Pappalardo, G.; Kiec, M. Innovative methods for improving the effectiveness of road safety inspection. In Proceedings of the VI International Symposium of Transport and Communications, New Horizons, Doboj, Bosnia and Herzegovina, 17–18 November 2017. [Google Scholar]
- Gu, D.; Andreev, K.; Dupre, M.E. Major Trends in Population Growth Around the World. China CDC Wkly. 2021, 3, 604–613. [Google Scholar] [CrossRef]
- Banister, J.; Bloom, D.E.; Rosenberg, L. Population aging and economic growth in China. 2012. Available online: https://www.hsph.harvard.edu/wp-content/uploads/sites/1288/2013/10/PGDA_WP_53.pdf (accessed on 9 July 2023).
- Fujisawa, K.; Murakami, A.; Nishimura, S.-I. Numerical analysis of the erosion and the transport of fine particles within soils leading to the piping phenomenon. Soils Found. 2010, 50, 471–482. [Google Scholar] [CrossRef]
- Ghazali, M.H.M.; Rahiman, W. An investigation of the reliability of different types of sensors in the real-time vibration-based anomaly inspection in drone. Sensors 2022, 22, 6015. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Duan, Y. Design and research of substation inspection mode based on digital twins. In Proceedings of the 2023 2nd International Conference on Big Data, Information and Computer Network (BDICN), Xishuangbanna, China, 6–8 January 2023; pp. 53–57. [Google Scholar]
- Khan, A.A.; Vrabie, V.; Mars, J.I.; Girard, A.; d’Urso, G. Automatic monitoring system for singularity detection in dikes by DTS data measurement. IEEE Trans. Instrum. Meas. 2009, 59, 2167–2175. [Google Scholar] [CrossRef]
- Xu, X.; Peng, S.; Xia, Y.; Ji, W. The development of a multi-channel GPR system for roadbed damage detection. Microelectron. J. 2014, 45, 1542–1555. [Google Scholar] [CrossRef]
- Xu, X.; Peng, S.; Yang, F. Development of a ground penetrating radar system for large-depth disaster detection in coal mine. J. Appl. Geophys. 2018, 158, 41–47. [Google Scholar] [CrossRef]
- Chai, H.; Li, Y.; Song, R.; Zhang, G.; Zhang, Q.; Liu, S.; Yang, Z. A survey of the development of quadruped robots: Joint configuration, dynamic locomotion control method and mobile manipulation approach. Biomim. Intell. Robot. 2022, 2, 100029. [Google Scholar] [CrossRef]
- Jiang, F.; Chen, X.; Zhan, Y.; Zhao, G.; Yang, H.; Zhao, L.; Qiao, L.; Wang, L. Shifting Correlation Between Earthquakes and Electromagnetic Signals: A Case Study of the 2013 Minxian–Zhangxian ML 6.5 (MW 6.1) Earthquake in Gansu, China. Pure Appl. Geophys. 2016, 172, 269–284. [Google Scholar] [CrossRef]
- Jiang, F.; Chen, X.; Chen, C.C.; Chen, H.J. Relationship between seismic electric signals and tectonics derived from dense geoelectric observations in Taiwan. Pure Appl. Geophys. 2020, 177, 441–454. [Google Scholar] [CrossRef]
- Fumian, F.; Di Giovanni, D.; Martellucci, L.; Rossi, R.; Gaudio, P. Application of miniaturized sensors to unmanned aerial systems, a new pathway for the survey of polluted areas: Preliminary results. Atmosphere 2020, 11, 471. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Suarez, L.; González-Dugo, V.; Fereres, E. Remote sensing of vegetation from UAV platforms using lightweight multispectral and thermal imaging sensors. Int. Arch. Photogramm. Remote Sens. Spat. Inform. Sci. 2009, 38, 6. [Google Scholar]
- Su, H.; Ma, J.; Zhou, R.; Wen, Z. Detect and identify earth rock embankment leakage based on UAV visible and infrared images. Infrared Phys. Technol. 2022, 122, 104105. [Google Scholar] [CrossRef]
- Zhou, R.; Su, H.; Wen, Z. Experimental study on leakage detection of grassed earth dam by passive infrared thermography. NDT E Int. 2022, 126, 102583. [Google Scholar] [CrossRef]
- Ngugi, L.C.; Abelwahab, M.; Abo-Zahhad, M. Recent advances in image processing techniques for automated leaf pest and disease recognition–A review. Inf. Process. Agric. 2021, 8, 27–51. [Google Scholar] [CrossRef]
- Boulent, J.; Foucher, S.; Théau, J.; St-Charles, P.L. Convolutional neural networks for the automatic identification of plant diseases. Front. Plant Sci. 2019, 10, 941. [Google Scholar] [CrossRef]
- Speiser, J.L.; Miller, M.E.; Tooze, J.; Ip, E. A comparison of random forest variable selection methods for classification prediction modeling. Expert Syst. Appl. 2019, 134, 93–101. [Google Scholar] [CrossRef] [PubMed]
- Zafari, A.; Zurita-Milla, R.; Izquierdo-Verdiguier, E. Evaluating the performance of a random forest kernel for land cover classification. Remote Sens. 2019, 11, 575. [Google Scholar] [CrossRef]
- Kuenzer, C.; Dech, S. Theoretical background of thermal infrared remote sensing. In Thermal Infrared Remote Sensing: Sensors, Methods, Applications; Springer: Dordrecht, The Netherlands, 2013; pp. 1–26. [Google Scholar]
- Aggarwal, S. Principles of remote sensing. Satell. Remote Sens. GIS Appl. Agric. Meteorol. 2004, 23, 23–28. [Google Scholar]
- Fillion, M.H.; Côté, J.; Konrad, J.M. Thermal radiation and conduction properties of materials ranging from sand to rock-fill. Can. Geotech. J. 2011, 48, 532–542. [Google Scholar] [CrossRef]
- Liao, K.C.; Wu, H.Y.; Wen, H.T. Using Drones for Thermal Imaging Photography and Building 3D Images to Analyze the Defects of Solar Modules. Inventions 2022, 7, 67. [Google Scholar] [CrossRef]
- Gruen, A. Development and Status of Image Matching in Photogrammetry: Development and status of image matching in photogrammetry. Photogramm. Rec. 2012, 27, 36–57. [Google Scholar] [CrossRef]
- Shen, X.; Darmon, F.; Efros, A.A.; Aubry, M. Ransac-flow: Generic two-stage image alignment. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings Part IV 16. pp. 618–637. [Google Scholar]
- Ye, Y.; Shan, J.; Bruzzone, L.; Shen, L. Robust Registration of Multimodal Remote Sensing Images Based on Structural Similarity. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2941–2958. [Google Scholar] [CrossRef]
- Ye, Y.; Bruzzone, L.; Shan, J.; Bovolo, F.; Zhu, Q. Fast and Robust Matching for Multimodal Remote Sensing Image Registration. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9059–9070. [Google Scholar] [CrossRef]
- Meng, L.; Zhou, J.; Liu, S.; Wang, Z.; Zhang, X.; Ding, L.; Wang, S. A robust registration method for UAV thermal infrared and visible images taken by dual-cameras. ISPRS J. Photogramm. Remote Sens. 2022, 192, 189–214. [Google Scholar] [CrossRef]
- Lewis, H.G.; Brown, M. A generalized confusion matrix for assessing area estimates from remotely sensed data. Int. J. Remote Sens. 2001, 22, 3223–3235. [Google Scholar] [CrossRef]
- Valero-Carreras, D.; Alcaraz, J.; Landete, M. Comparing two SVM models through different metrics based on the confusion matrix. Comput. Oper. Res. 2023, 152, 106131. [Google Scholar] [CrossRef]
- Jake, L. Classification evaluation: It is important to understand both what a classification metric expresses and what it hides. Nat. Methods 2016, 13, 603–605. [Google Scholar]
- Wang, Y.; Guo, N.; Wang, S.; Gu, Y. Detection of Internal Erosion and Piping in Embankment Dams. In Proceedings of the 2016 International Forum on Energy, Environment and Sustainable Development, Shenzhen, China, 16–17 April 2016. [Google Scholar]
- Liang, Y.; Chen, J.; Chen, L.; Shen, J. Laboratory tests and analysis on piping in two-stratum dike foundation. Chin. J. Geotech. Eng. 2011, 33, 624–629. [Google Scholar]
- Yao, Q.; Liu, C.; Ding, L.; Zhang, S. Experimental study on the microcosmic mechanism of backward piping in dike foundations. J. China Inst. Water Resour. Hydropower Res. 2014, 12, 7. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Specifications |
|---|---|
| Thermal image resolution | 640 × 512 pixels |
| NETD 1 | ≤50 mK @ f/1.0 |
| Phase element spacing of the sensor | 12 μm |
| Field of view | 40.6°; focal length 13.5 mm |
| Image format | R-JPEG 2 (16-bit) |
| Spectral range | 8–14 μm |
| Feature | Specifications |
|---|---|
| Image resolution | 12 million pixels |
| Field of view | 82.9°; focal length 4.5 mm |
| Maximum photo size | 4056 × 3040 |
| Sensor | 1/2.3″ CMOS |
| Image format | JPEG |
| No. | Weather | Height | Speed | Accuracy | Precision | Recall | Sample |
|---|---|---|---|---|---|---|---|
| 1 | Sunny & breeze | 30 m | 8 m/s | (410/416) 98.6% | (10/16) 67% | (10/10) 100% | 416 |
| 2 | Drizzly & windy | 30 m | 11 m/s | (406/416) 97.6% | (10/20) 50% | (10/10) 100% | 416 |
| 3 | Cloudy &breeze | 60 m | 11 m/s | (130/160) 81% | (18/30) 60% | (18/18) 100% | 160 |
| 4 | Sunny & breeze | 30–120 m | 15 m/s | (18/20) 90% | (18/18) 100% | (18/20) 90% | 20 |
| 5 | Drizzly &windy | 30–120 m | 15 m/s | (8/20) 40% | (8/8) 100% | (8/20) 40% | 20 |
| 6 | Sunny | 30–120 m | 0 m/s | (20/20) 100% | (20/20) 100% | (20/20) 100% | 20 |
| 7 | Cloudy | 30–120m | 0 m/s | (20/20) 100% | (20/20) 100% | (20/20) 100% | 20 |
| 8 | Drizzly | 30–120 m | 0 m/s | (20/20) 100% | (20/20) 100% | (20/20) 100% | 20 |
| Relative Altitude (m) | Pixels per Square Meter (units) | GSD (m) | Speed = 15 m/s Sunny and Breeze | Speed = 15 m/s Drizzly and Windy |
|---|---|---|---|---|
| 30 | 1089 | 0.027 | Y 1 | Y |
| 40 | 772 | 0.036 | Y | Y |
| 50 | 516 | 0.044 | Y | Y |
| 60 | 355 | 0.053 | Y | Y |
| 70 | 260 | 0.062 | Y | N |
| 80 | 198 | 0.071 | Y | N |
| 90 | 156 | 0.080 | Y | N |
| 100 | 126 | 0.089 | Y | N |
| 110 | 104 | 0.098 | Y | N |
| 120 | 87 | 0.107 | N 2 | N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, R.; Wang, Z.; Sun, H.; Zhou, S.; Liu, Y.; Liu, J. Automatic Identification of Earth Rock Embankment Piping Hazards in Small and Medium Rivers Based on UAV Thermal Infrared and Visible Images. Remote Sens. 2023, 15, 4492. https://doi.org/10.3390/rs15184492
Li R, Wang Z, Sun H, Zhou S, Liu Y, Liu J. Automatic Identification of Earth Rock Embankment Piping Hazards in Small and Medium Rivers Based on UAV Thermal Infrared and Visible Images. Remote Sensing. 2023; 15(18):4492. https://doi.org/10.3390/rs15184492
Chicago/Turabian StyleLi, Renzhi, Zhonggen Wang, Hongquan Sun, Shugui Zhou, Yong Liu, and Jinping Liu. 2023. "Automatic Identification of Earth Rock Embankment Piping Hazards in Small and Medium Rivers Based on UAV Thermal Infrared and Visible Images" Remote Sensing 15, no. 18: 4492. https://doi.org/10.3390/rs15184492