


Spatial Downscaling of Soil Moisture Based on Fusion Methods in Complex Terrains
 , , ,
, , ,  and
and 
Abstract
:
1. Introduction
2. Study Area and Data
2.1. Study Area
2.2. Data
2.2.1. SMAP
2.2.2. In Situ SM
2.2.3. Downscaling Predictors
3. Methodology
4. Results and Analysis
4.1. Correlation Analysis of Model Variables
4.2. Comparisons of the Downscaled Results
4.3. In Situ SM Fusion Results
5. Discussion and Conclusions
- (1)
- Themost correlated predictors were slope, elevation, day sequence, and longitude. The day sequence, ET, latitude, LST, and EVI were more effective in autumn than in summer and in the NW area than in the SE area. Most of the CCs were relatively high in the NW area. The EVI was a more effective indicator of vegetation than the NDVI. The aspect was more effective in the NW area than in the SE area. The elevation, day sequence, latitude, longitude, and slope had a much higher importance than the other predictors in the RF model. It is important to include spatiotemporal information and terrain as inputs in downscaling SM over complex terrains.
- (2)
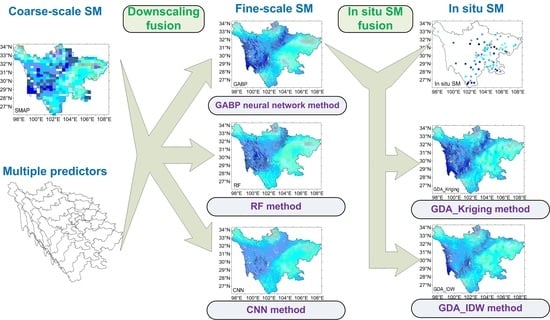
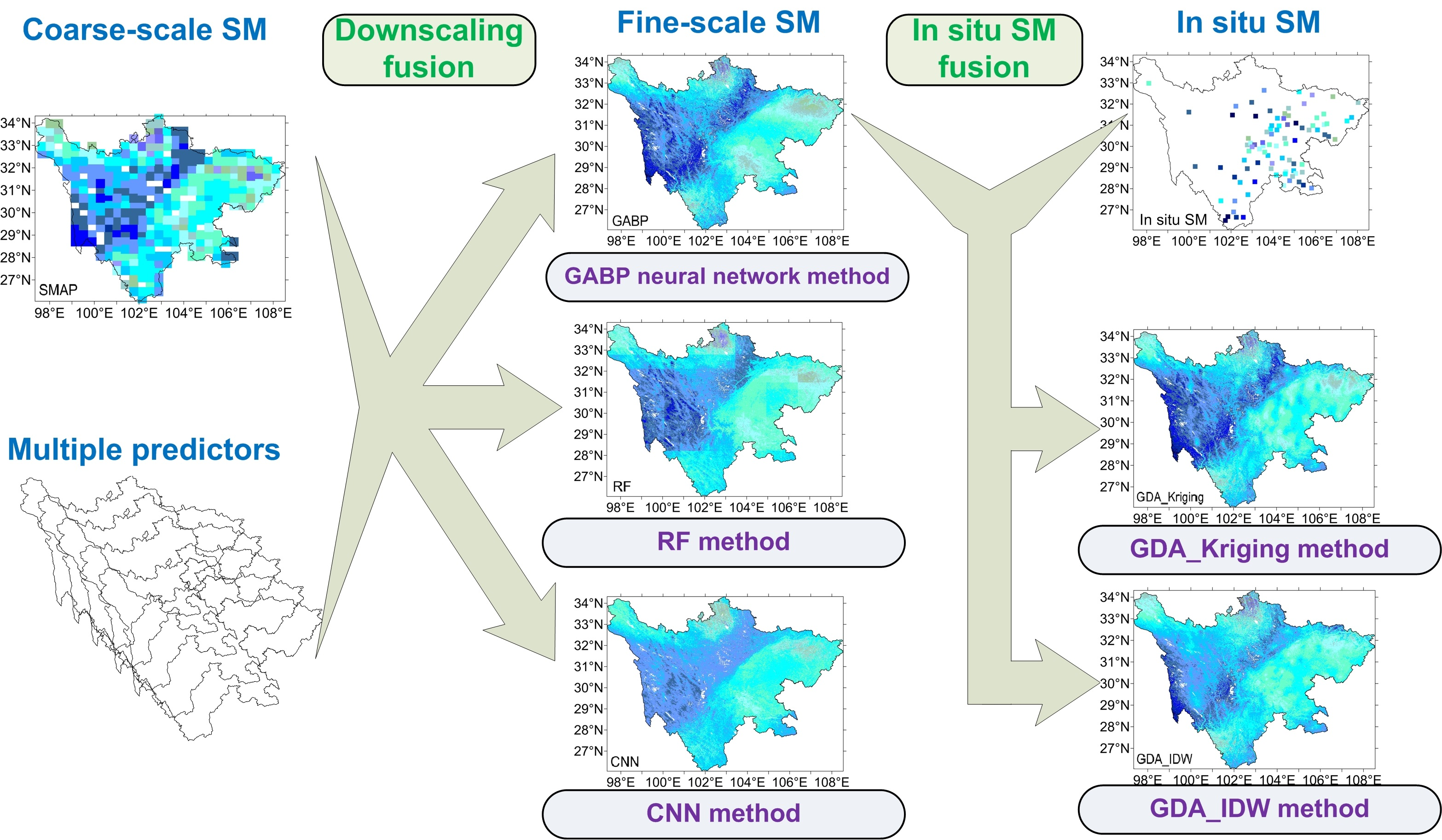
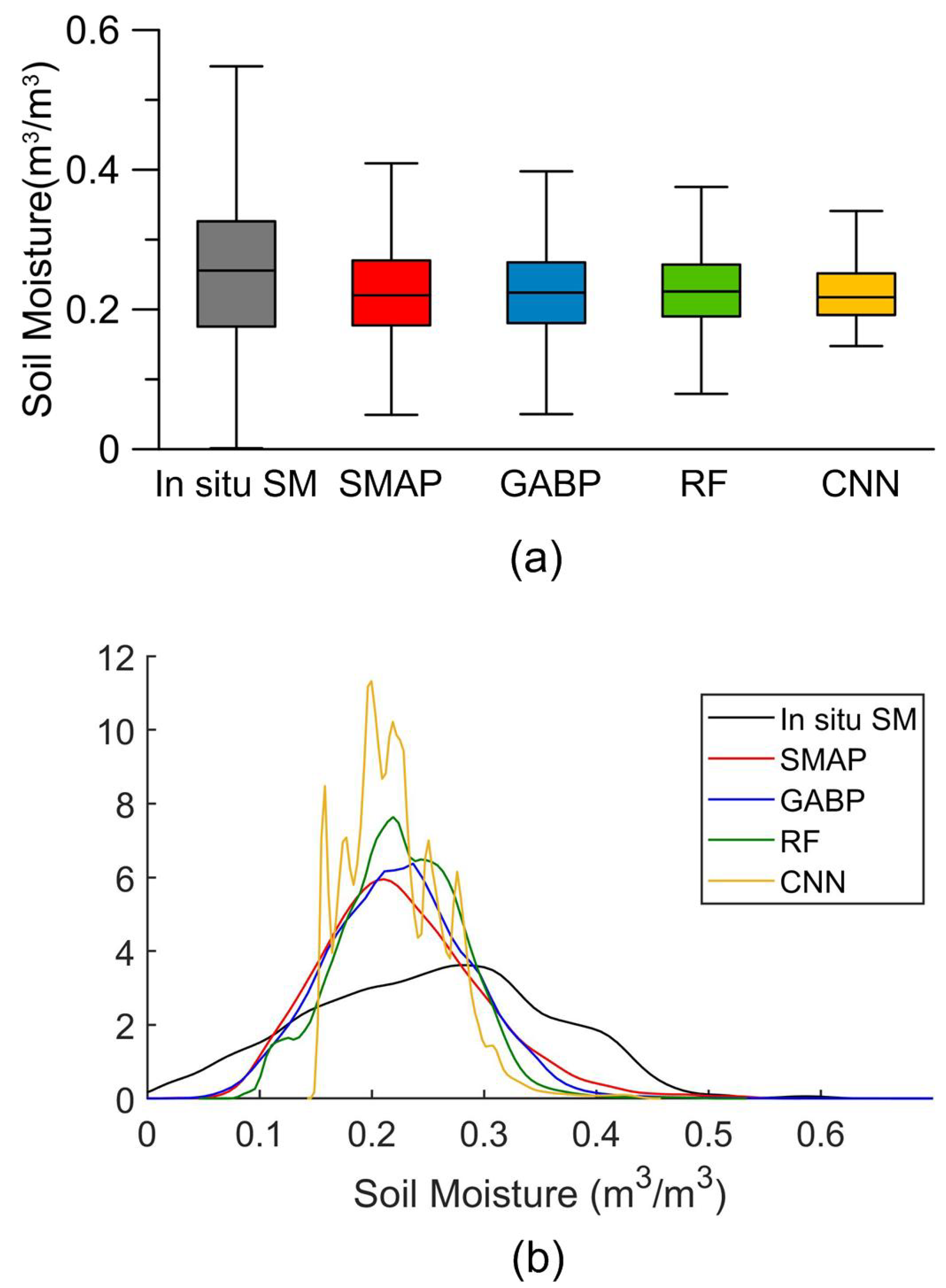
- The GABP neural network showed advantages in data accuracy and spatial and temporal fineness when compared to the RF and CNN. The GABP neural network results maintained the dynamic range and mean level of the original SMAP with statistical consistency, whereas the RF and CNN reduced the dynamic range. These three methods could reduce the error of SMAP, and the data were more accurate in autumn than in summer. The GABP neural network had the smallest error among the three, especially in summer. RF was prone to abrupt warp and weft changes in space, and the CNN had a spatial smoothness. The GABP neural network model can better capture the mean states and details of variation in time and space, and it has advantages in high-elevation areas and large undulating terrains over the RF and CNN.
- (3)
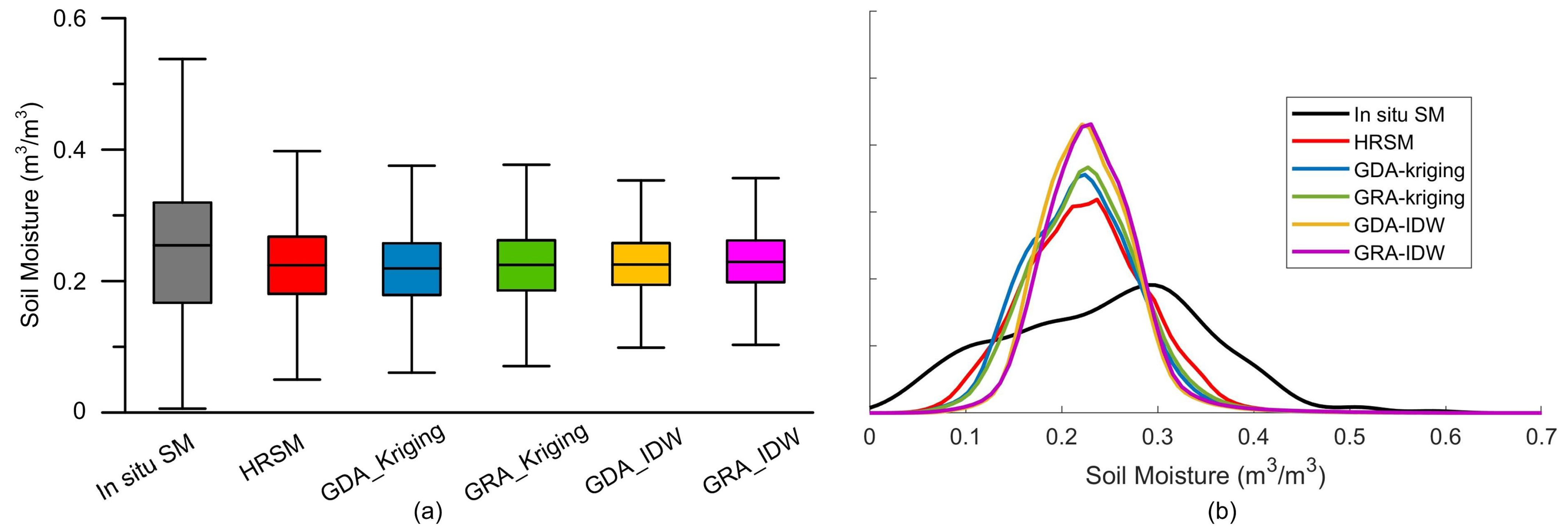
- In the in situ SM fusion, the GDA had a lower RMSE and MAE than the GRA when applying the same interpolation method. The GDA_Kriging interpolation method could better preserve the dynamic range, statistical characteristics, and spatial details of the HRSM data than the GDA_IDW method. The fusion results improved the dynamic range of the HRSM and was closer to the in situ SM. The GDA_IDW method tended to smooth the spatial variations.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Islam, S.; Engman, T. Why bother for 0.0001% of Earth’s water? Challenges for soil moisture research. Eos Trans. Am. Geophys. Union 1996, 77, 420. [Google Scholar] [CrossRef]
- Gao, C.; Li, G.; Xu, B.; Li, X. Effect of spring soil moisture over the Indo-China Peninsula on the following summer extreme precipitation events over the Yangtze River basin. Clim. Dyn. 2020, 54, 3845–3861. [Google Scholar] [CrossRef]
- Chatterjee, S.; Desai, A.R.; Zhu, J.; Townsend, P.A.; Huang, J. Soil moisture as an essential component for delineating and forecasting agricultural rather than meteorological drought. Remote Sens. Environ. 2022, 269, 112833. [Google Scholar] [CrossRef]
- Zhang, L.; He, C.; Zhang, M.; Zhu, Y. Evaluation of the SMOS and SMAP soil moisture products under different vegetation types against two sparse in situ networks over arid mountainous watersheds, Northwest China. Sci. China Earth Sci. 2019, 62, 703–718. [Google Scholar] [CrossRef]
- Wakigar, S.A.; Leconte, R. Exploring the utility of the downscaled SMAP soil moisture products in improving streamflow simulation. J. Hydrol. Reg. Stud. 2023, 477, 101391. [Google Scholar] [CrossRef]
- Fang, B.; Kansara, P.; Dandridge, C.; Lakshmi, V. Drought monitoring using high spatial resolution soil moisture data over Australia in 2015–2019. J. Hydrol. 2021, 594, 125960. [Google Scholar] [CrossRef]
- Schmugge, T. Remote Sensing of Surface Soil Moisture. J. Appl. Meteorol. 1978, 17, 1549–1557. [Google Scholar] [CrossRef]
- Draper, C.S.; Reichle, R.H.; De Lannoy, G.J.M.; Liu, Q. Assimilation of passive and active microwave soil moisture retrievals. Geophys. Res. Lett. 2012, 39, 194. [Google Scholar] [CrossRef]
- Toride, T.; Sawada, Y.; Aida, K.; Koike, T. Toward High-Resolution Soil Moisture Monitoring by Combining Active-Passive Microwave and Optical Vegetation Remote Sensing Products with Land Surface Model. Sensors 2019, 19, 3924. [Google Scholar] [CrossRef] [PubMed]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Ma, H.; Zeng, J.; Chen, N.; Zhang, X.; Cosh, M.H.; Wang, W. Satellite surface soil moisture from SMAP, SMOS, AMSR2 and ESA CCI: A comprehensive assessment using global ground-based observations. Remote Sens. Environ. 2019, 231, 111215. [Google Scholar] [CrossRef]
- Zhang, X.; Dong, J.; Huang, S.; Nam, W.; Niyogi, D.; Xu, L.; Chen, N.; Fu, P.; Gu, X.; Rab, G. A novel fusion method for generating surface soil moisture data with high accuracy, high spatial resolution, and high spatio-temporal continuity. Water Resour. Res. 2022, 58, e2021WR030827. [Google Scholar] [CrossRef]
- Lv, A.; Zhang, Z.; Zhu, H. A Neural-Network Based Spatial Resolution Downscaling Method for Soil Moisture: Case Study of Qinghai Province. Remote Sens. 2021, 13, 1583. [Google Scholar] [CrossRef]
- Yang, H.; Xiong, L.; Liu, D.; Cheng, L.; Chen, J. High spatial resolution simulation of profile soil moisture by assimilating multi-source remote-sensed information into a distributed hydrological model. J. Hydrol. 2021, 597, 126311. [Google Scholar] [CrossRef]
- Rouf, T.; Maggioni, V.; Mei, Y.; Houser, P. Towards hyper-resolution land-surface modeling of surface and root zone soil moisture. J. Hydrol. 2021, 594, 125945. [Google Scholar] [CrossRef]
- Kwon, M.; Kwon, H.-H.; Han, D. A Spatial Downscaling of Soil Moisture from Rainfall, Temperature, and AMSR2 Using a Gaussian-Mixture Nonstationary Hidden Markov Model. J. Hydrol. 2018, 13, 1583. [Google Scholar] [CrossRef]
- Chan, S.K.; Bindlish, R.; O’Neill, P.; Jackson, T.; Njoku, E.; Dunbar, S.; Chaubell, J.; Piepmeier, J.; Yueh, S.; Entekhabi, D.; et al. Development and assessment of the SMAP enhanced passive soil moisture product. Remote Sens. Environ. 2017, 204, 931–941. [Google Scholar] [CrossRef] [PubMed]
- Vinnikov, K.Y.; Robock, A.; Speranskaya, N.A.; Schlosser, C.A. Scales of temporal and spatial variability of midlatitude soil moisture. J. Geophys. Res. 1996, 101, 7163–7174. [Google Scholar] [CrossRef]
- Qiu, Y.; Fu, B.; Wang, J.; Chen, L. Soil moisture variation in relation to topography and land use in a hillslope catchment of the Loess Plateau, China. J. Hydrol. 2001, 240, 243–263. [Google Scholar] [CrossRef]
- Lei, F.; Wade, C.; Shen, H.; Robert, P.; Thomas, H. The Impact of Local Acquisition Time on the Accuracy of Microwave Surface Soil Moisture Retrievals over the Contiguous United States. Remote Sens. 2015, 7, 13448–13465. [Google Scholar] [CrossRef]
- Parinussa, R.M.; Holmes, T.; Crow, W.T. The impact of land surface temperature on soil moisture anomaly detection from passive microwave observations. Hydrol. Earth Syst. Sci. Discuss. 2011, 8, 3135–3151. [Google Scholar] [CrossRef]
- Teuling, A.J.; Seneviratne, S.I.; Williams, C.; Troch, P.A. Observed timescales of evapotranspiration response to soil moisture. Geophys. Res. Lett. 2006, 33, L23403. [Google Scholar] [CrossRef]
- Zhao, S.; Yang, Y.; Qiu, G.; Qin, Q.; Yao, Y.; Xiong, Y.; Li, C. Remote detection of bare soil moisture using a surface-temperature-based soil evaporation transfer coefficient. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, 351–358. [Google Scholar] [CrossRef]
- Liu, S.; Liu, S.; Fu, Z.; Sun, L. A nonlinear coupled soil moisture-vegetation model. Adv. Atmos. Sci. 2005, 22, 337–342. [Google Scholar] [CrossRef]
- Francis, C.F.; Thornes, J.B.; Romero Diaz, A.; Lopez Bermudez, F.; Fisher, G.C. Topographic control of soil moisture, vegetation cover and land degradation in a moisture stressed mediterranean environment. Catena 1986, 13, 211–225. [Google Scholar] [CrossRef]
- Guan, L.; Gao, L.; Din, E.N.; Liang, C. Statistical Machine Learning vs Deep Learning in Information Fusion: Competition or Collaboration? In Proceedings of the 2018 IEEE Conference on Multimedia Information Processing and Retrieval (MIPR), Miami, FL, USA, 10–12 April 2018; pp. 251–256. [Google Scholar] [CrossRef]
- Sun, X.; Tian, Y.; Lu, W.; Wang, P.; Niu, R.; Yu, H.; Fu, K. From single- to multi-modal remote sensing imagery interpretation: A survey and taxonomy. Sci. China Inf. Sci. 2023, 66, 140301. [Google Scholar] [CrossRef]
- Song, P.; Zhang, Y.; Tian, J. Improving surface soil moisture estimates in humid regions by an enhanced remote sensing technique. Geophys. Res. Lett. 2021, 48, e2020GL091459. [Google Scholar] [CrossRef]
- Zhao, W.; Wen, F.; Wang, Q.; Sanchez, N.; Piles, M. Seamless downscaling of the ESA CCI soil moisture data at the daily scale with MODIS land products. J. Hydrol. 2021, 603, 126930. [Google Scholar] [CrossRef]
- Chen, Q.; Miao, F.; Xu, Z.-X.; Wang, H.; Yang, L.; Tang, Z. Downscaling of Remote Sensing Soil Moisture Products Based on TVDI in Complex Terrain Areas. In Proceedings of the International Conference on Meteorology Observations (ICMO), Chengdu, China, 28–31 December 2019. [Google Scholar] [CrossRef]
- Ojha, N.; Merlin, O.; Molero, B.; Suere, C.; Olivera-Guerra, L.; Hssaine, A.B.; Amazirh, A.; Bitar, A.A.; Escorihuela, J.M.; Er-Raki, S. Stepwise Disaggregation of SMAP Soil Moisture at 100 m Resolution Using Landsat-7/8 Data and a Varying Intermediate Resolution. Remote Sens. 2019, 11, 1863. [Google Scholar] [CrossRef]
- Nadeem, A.A.; Zha, Y.; Shi, L.; Ali, S.; Wang, X.; Zafar, Z.; Afzal, Z.; Tariq, M.A.U.R. Spatial Downscaling and Gap-Filling of SMAP Soil Moisture to High Resolution Using MODIS Surface Variables and Machine Learning Approaches over ShanDian River Basin, China. Remote Sens. 2023, 15, 812. [Google Scholar] [CrossRef]
- Chen, Q.; Miao, F.; Wang, H.; Xu, Z.-X.; Tang, Z.; Yang, L.; Qi, S. Downscaling of satellite remote sensing soil moisture products over the Tibetan plateau based on the random forest algorithm: Preliminary results. Earth Spat. Sci. 2020, 7, e2020EA001265. [Google Scholar] [CrossRef]
- Hu, F.; Wei, Z.; Zhang, W.; Dorjee, D.; Meng, L. A spatial downscaling method for SMAP soil moisture through visible and shortwave-infrared remote sensing data. J. Hydrol. 2020, 590, 125360. [Google Scholar] [CrossRef]
- Zhao, H.; Li, J.; Yuan, Q.; Lin, L.; Yue, L.; Xu, H. Downscaling of soil moisture products using deep learning: Comparison and analysis on Tibetan Plateau. J. Hydrol. 2022, 607, 127570. [Google Scholar] [CrossRef]
- Cai, Y.; Fan, P.; Lang, S.; Li, M.; Muhammad, Y.; Liu, A. Downscaling of SMAP Soil Moisture Data by Using a Deep Belief Network. Remote Sens. 2022, 14, 5681. [Google Scholar] [CrossRef]
- Yan, Q.; Jin, S.; Huang, W.; Jia, Y.; Wei, S. Retrievals of soil moisture and vegetation optical depth using CyGNSS data. J. Nanjing Univ. Inf. Sci. Technol. 2021, 13, 194–203. (In Chinese) [Google Scholar]
- Vlachas, P.R.; Pathak, J.; Hunt, B.R.; Sapsis, T.P.; Koumoutsakos, P. Backpropagation algorithms and reservoir computing in recurrent neural networks for the forecasting of complex spatiotemporal dynamics. Neural Netw. 2020, 126, 191–217. [Google Scholar] [CrossRef]
- Kuter, S. Completing the machine learning saga in fractional snow cover estimation from MODIS Terra reflectance data: Random forests versus support vector regression. Remote Sens. Environ. Interdiscip. J. 2021, 255, 112294. [Google Scholar] [CrossRef]
- Malik, A.; Tikhamarine, Y.; Souag-Gamane, D.; Rai, P.; Sammen, S.S.; Kisi, O. Support vector regression integrated with novel meta-heuristic algorithms for meteorological drought prediction. Meteorol. Atmos. Phys. 2021, 133, 891–909. [Google Scholar] [CrossRef]
- Singh, A.; Gaurav, K. Sonkar, G.K.; Cheng, C.L. Strategies to Measure Soil Moisture Using Traditional Methods, Automated Sensors, Remote Sensing, and Machine Learning Techniques: Review, Bibliometric Analysis, Applications, Research Findings, and Future Directions. IEEE Access 2023, 11, 13605–13635. [Google Scholar] [CrossRef]
- Sabaghy, S.; Walker, J.P.; Renzullo, L.J.; Jackson, T.J. Spatially enhanced passive microwave derived soil moisture: Capabilities and opportunities. Remote Sens. Environ. 2018, 209, 551–580. [Google Scholar] [CrossRef]
- Peng, J.; Loew, A.; Merlin, O.; Verhoest, N.E.C. A review of spatial downscaling of satellite remotely sensed soil moisture. Rev. Geophys. 2017, 55, 341–366. [Google Scholar] [CrossRef]
- Sun, Q.L.; Feng, X.F.; Ge, Y.; Li, B.L. Topographical effects of climate data and their impacts on the estimation of net primary productivity in complex terrain: A case study in Wuling mountainous area, China. Ecol. Inform. 2015, 27, 44–54. [Google Scholar] [CrossRef]
- Yao, X.; Fu, B.; Lv, Y.; Sun, F.; Wang, S.; Liu, M. Comparison of Four Spatial Interpolation Methods for Estimating Soil Moisture in a Complex Terrain Catchment. PLoS ONE 2013, 8, e54660. [Google Scholar] [CrossRef] [PubMed]
- Moniz, N.; Monteiro, H. No Free Lunch in imbalanced learning. Knowl.-Based Syst. 2021, 227, 107222. [Google Scholar] [CrossRef]
- Wolpert, D.H. The Lack of a Priori Distinctions between Learning Algorithms. Neural Comput. 1996, 8, 1341–1390. [Google Scholar] [CrossRef]
- Weng, Q.; Yuan, D.; Zhang, C.; Song, Y.; Fu, H.; Chen, J.; Li, Q.; Wang, C. Spatial Distribution Characteristics of Soil Moisture Regimes in Sichuan Province. Soils 2017, 49, 1254–1261. (In Chinese) [Google Scholar] [CrossRef]
- Li, X.; He, B.; Quan, X.; Yin, C.; Liao, Z.; Qiu, S.; Bai, X. Recent change of vegetation growth trend and its relations with climate factors in Sichuan, China. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 342–345. [Google Scholar] [CrossRef]
- He, J.; Zhang, K.; Liu, X.; Liu, G.; Zhao, X.; Xie, Z.; Lu, H. Vegetation Restoration Monitoring in Yingxiu Landslide Area after the 2008 Wenchuan Earthquake. Earthq. Res. China 2020, 34, 157–166. [Google Scholar] [CrossRef]
- Liu, K.; Cao, C.K.; Wang, S.Q.; Zhu, Z.Z.; Wang, B. The Afforestation Type Division and Vegetation Restoration Technique in Arid and Semi-arid Areas of Sichuan Province. J. Sichuan For. Sci. Technol. 2015, 36, 59–64. (In Chinese) [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.; O’Neill, P. The Soil Moisture Active and Passive Mission (SMAP): Science and applications. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–3. [Google Scholar] [CrossRef]
- O’Neill, P.; Entekhabi, D.; Njoku, E.; Kellogg, K. The NASA soil moisture active passive (SMAP) mission: Overview. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 3236–3239. [Google Scholar] [CrossRef]
- He, C.; Shi, P.; Zhang, X. Fault Characteristics, Installation and Maintenance of DZN2 Automatic Soil Moisture Detector in Sichuan Province. Mod. Agric. Sci. Technol. 2021, 149–152. (In Chinese) [Google Scholar]
- Rexer, M.; Hirt, C. Comparison of free high resolution digital elevation data sets (ASTER GDEM2, SRTM v2.1/v4.1) and validation against accurate heights from the Australian National Gravity Database. Aust. J. Earth Sci. 2014, 61, 213–226. [Google Scholar] [CrossRef]
- Wei, Z.; Liu, Y. Construction of super-resolution model of remote sensing image based on deep convolutional neural network. Comput. Commun. 2021, 178, 191–200. [Google Scholar] [CrossRef]
- Ducournau, A.; Fablet, R. Deep Learning for Ocean Remote Sensing: An Application of Convolutional Neural Networks for Super-Resolution on Satellite-Derived SST Data. In Proceedings of the 9th IAPR Workshop on Pattern Recogniton in Remote Sensing (PRRS), Cancun, Mexico, 4 December 2016. [Google Scholar] [CrossRef]
- Kynigakis, I.; Panopoulou, E.; Pesaran, M.H. Does model complexity add value to asset allocation? Evidence from machine learning forecasting models. J. Appl. Econom. 2022, 37, 603–639. [Google Scholar] [CrossRef]
- Duan, Z.; Bastiaanssen, W.G.M. First results from Version 7 TRMM 3B43 precipitation product in combination with a new downscaling–calibration procedure. Remote Sens. Environ. 2013, 131, 1–13. [Google Scholar] [CrossRef]
- Lu, G.Y.; Wong, D.W. An adaptive inverse-distance weighting spatial interpolation technique. Comput. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. Phys. 2021, 3, 422–440. [Google Scholar] [CrossRef]
- Irrgang, C.; Boers, N.; Sonnewald, M.; Barnes, E.A.; Saynisch-Wagner, J. Towards neural Earth system modelling by integrating artificial intelligence in Earth system science. Nat. Mach. Intell. 2021, 3, 667–674. [Google Scholar] [CrossRef]
- Liao, T.W.; Li, G. Metaheuristic-based inverse design of materials—A survey. J. Mater. 2020, 6, 414–430. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Types | Variables | Temporal Resolutions | Spatial Resolutions | Units |
|---|---|---|---|---|
| SM | SMAP SM | 50 h | ~36 km | m3/m3 |
| In situ SM | 1 h | — | ||
| Space information | Elevation | — | ~30 m | m |
| Longitude | — | 0.001° | ° | |
| Latitude | ||||
| Time information | Day sequence | — | — | — |
| AM/PM | ||||
| Land-surface environment variables | LST | 1 day | ~1 km | K |
| ET | 8 days | ~500 m | kg/m2 | |
| LCT | 1 year | ~500m | — | |
| NDVI | 16 days | ~1 km | — | |
| EVI | ||||
| Slope | — | ~30 m | ° | |
| Aspect |
| HRSM | GDA_IDW | GRA_IDW | GDA_Kriging | GRA_Kriging | |
|---|---|---|---|---|---|
| RMSE (m3/m3) | 0.0980 | 0.0944 | 0.0946 | 0.0950 | 0.0960 |
| MAE (m3/m3) | 0.0784 | 0.0757 | 0.0758 | 0.0761 | 0.0769 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Tang, X.; Li, B.; Tang, Z.; Miao, F.; Song, G.; Yang, L.; Wang, H.; Zeng, Q. Spatial Downscaling of Soil Moisture Based on Fusion Methods in Complex Terrains. Remote Sens. 2023, 15, 4451. https://doi.org/10.3390/rs15184451
Chen Q, Tang X, Li B, Tang Z, Miao F, Song G, Yang L, Wang H, Zeng Q. Spatial Downscaling of Soil Moisture Based on Fusion Methods in Complex Terrains. Remote Sensing. 2023; 15(18):4451. https://doi.org/10.3390/rs15184451
Chicago/Turabian StyleChen, Qingqing, Xiaowen Tang, Biao Li, Zhiya Tang, Fang Miao, Guolin Song, Ling Yang, Hao Wang, and Qiangyu Zeng. 2023. "Spatial Downscaling of Soil Moisture Based on Fusion Methods in Complex Terrains" Remote Sensing 15, no. 18: 4451. https://doi.org/10.3390/rs15184451