1. Introduction
Nowadays, with the deepening of ocean exploration and development, the use of the autonomous underwater vehicle (AUV) in these missions is becoming common. However, the accuracy and stability of underwater navigation systems also face higher requirements [
1,
2].
The strapdown inertial navigation system (SINS) has become the primary navigation device of AUVs due to the comprehensive navigation information that can be provided, including velocity, attitude, and position, and it has the advantages of high precision and substantial autonomy [
2,
3,
4]. However, the navigation error of SINS needs to be corrected, otherwise results are lower in navigation accuracy [
4,
5]. Typical devices combined with SINS consist of a Global Positioning System (GPS), pressure sensor (PS), Doppler Velocity Log (DVL), and several acoustic equipment [
2]. Kalman filter can decrease the accumulated position error by combining GPS and INS [
6]. For inertial navigation system’s (INS’s) initial alignment, the invariant extended Kalman filtering (IEKF) is applicable even with arbitrary large misalignments [
7,
8]. However, it is not applicable because of the rapid attenuation of GPS signals in complex underwater environments [
9]. DVL is a relatively good choice, it can provide accurate ground speed in the body frame, or the velocity relative to water flow. When DVL and SINS are velocity-matched through Kalman filtering, the velocity output from the DVL effectively mitigates the error accumulation in SINS over time [
6,
10].
SINS/DVL integrated navigation systems can entirely rely on the vehicle’s equipment to navigate and obtain a higher positioning accuracy [
11]. However, the accuracy of SINS/DVL integrated navigation also depends on the alignment and calibration accuracy of the sensors [
12]. The navigation could be better due to the error of reference velocity information affecting the positioning accuracy of the SINS/DVL integrated navigation system directly [
12]. It mainly includes the scale factor error of DVL [
13], the misalignment angles between SINS and DVL, and the lever arm between SINS and DVL [
2]. Besides, to ensure the system’s navigation accuracy, the fast initial alignment of the SINS needs to be performed before it works [
14,
15]. In practical applications, when the carrier navigates to the deep sea, the operating mode of DVL automatically switches from the bottom-tracking mode to the water tracking mode. The ocean current velocity will significantly impact the navigation accuracy of the SINS/DVL integrated navigation system [
11,
16]. For navigation systems, ocean current velocity is usually required to be included in the kinematic models [
17], as Yao noted in the concluding section of [
18], “It should be noted that when DVL works on its water track mode, the inference of the water current should be considered and compensated before employing the proposed algorithm,” which implies ocean current velocity is vital in many underwater applications.
In order to reduce the influence of ocean current velocity on the navigation system, scholars have conducted much research. Morgado et al. presented a novel approach to designing globally asymptotically stable position filters based directly on the sensor readings of an ultra-short baseline (USBL) acoustic array and a DVL [
19]. Wu et al. proposed a multi-AUVs cooperative ocean current estimation method [
20]. He et al. focused on estimating unknown currents and measurement noise covariance for an underwater vehicle based on the USBL, DVL, and PS. They proposed a novel unbiased adaptive two-stage information filter for the underwater vehicle with an unknown time-varying current velocity [
21]. These methods heavily rely on external auxiliary equipment to provide location information. Meurer et al. presented a flow-relative velocity sensor for marine vehicles using differential pressure [
22]. However, the actual lightweight and energy efficient sensor (DPSSv2) is far from the accuracy of the model. In [
23], the authors proposed a deep learning approach to predict the relative horizontal velocity of AUVs using data from the inertial measurement unit (IMU), PS, and control inputs, and implemented them in natural ocean conditions. However, this method is relatively less mature because it needs to consider sensor noise and random walk errors. Zang et al. proposed a Multiple Model Adaptive Estimation algorithm to estimate the ocean current velocity [
24], which dramatically increases the computation of the system.
Recently, the research focused on increasing the measurement information without adding external sensors is also a development direction. Many approaches to machine learning have been proposed, but uncertainty in machine learning models is not friendly to navigation accuracy [
25]. Chang et al. proposed an active perception approach for the localization of AUV. Ocean current velocity has been estimated from IMU measurements by exploiting spiral motion underflow and integrated into the model [
26,
27]. However, this method could be better and still needs to improve. Liu et al. proposed a concept of a self-aided navigation system, using only information from the IMU itself [
28], and Wu et al. made some optimizations on this basis [
29]. Ben et al. proposed a dual-state filter algorithm to solve the problem of degradation of the accuracy of the SINS/DVL integrated navigation system due to ocean currents [
30]. In [
30], the authors assumed that ocean current velocity over a short period is relatively stable, chose the difference between the two adjacent sample points as the external measurement information, and the final simulation results show that the effect of unknown ocean current velocity can be alleviated. Wang et al. constructed a virtual velocity by velocity variations of SINS and DVL and the SINS velocity of compensation and used it as a different measurement for the Kalman filter [
31]. Inspired by these ideas, the main work of this study is to propose a novel method for estimating the constant ocean current velocity based on a virtual metrology filter (VMF) without using any external auxiliary information.
When the DVL operates in bottom-tracking mode, its measured velocity is unaffected by the ocean current velocity. By utilizing SINS and DVL for velocity matching, highly accurate integrated navigation can be achieved. However, when the DVL operates in water tracking mode, it measures velocity relative to the ocean current layer. In this scenario, the true AUV speed is obtained by adding the DVL speed to the ocean current speed. Including ocean current speed as a part of the state estimation in a Kalman filter-based integrated navigation system can result in poor positioning accuracy due to the coupling of SINS velocity error and the ocean current term. In this paper, leveraging the assumption of constant ocean currents and fully utilizing historical data, we manage to decouple the ocean current speed by constructing a virtual speed measurement and a new measurement equation. This has allowed us to achieve our goal of high-precision positioning.
The rest of this paper is organized as follows: in
Section 2, the SINS/DVL integrated navigation system under the influence of ocean currents based on KF is described and analyzed. Furthermore,
Section 3 introduces the proposed VMFs method for estimating the ocean current velocity.
Section 4 verifies the reliability of the proposed algorithms by simulation and lake tests. Finally, conclusions are given in
Section 5.
3. The Proposed VMF Methods
The corrected SINS velocity,
, at
can be obtained by subtracting the SINS velocity error,
, from the SINS update velocity,
, as follows:
Based on the assumption that the ocean current velocity is constant, the increment velocity in
n-frame during the time period
can be approximated by the increment velocity of DVL in
n-frame as follows:
where the estimated misalignment angles of
,
are used to correct the attitude matrix for the current time. Note that this approximate expression of the misalignment angle during the incremental velocity calculation does not cause accumulated errors. By adding the corrected SINS velocity of the previous moment to the increments of the two adjacent moments, the virtual velocity of the current moment can be constructed as follows:
The construction of the virtual velocity, , at the time in Equation (24) has a prerequisite condition: the corrected SINS velocity, , must be accurate enough. An accurate initial velocity is a critical guarantee for subsequent corrections, so it is necessary to obtain an accurate initial velocity in the AUV navigation system.
3.1. Decoupling the Ocean Current Velocity
Differencing the virtual velocity with the DVL velocity projection in the
n-system at the current moment yields:
The eastward and northward of the velocity differences are selected as the new measurement vector, as follows:
Combining Equation (25), the new added measurement equation can be expanded as:
where
represent the i-th row of
. According to Equations (25)–(27), the additional measurement equations can be constructed as:
where the
donates the measurement noise. The measurement matrix
can be written as follows:
Combining
with
of Equation (20) as the new measurement model:
The measurement matrix
can be expanded as follows:
In Equation (27), the newly added measurement only contains the term related to the ocean current velocity. By introducing this new measurement equation, the current velocity becomes decoupled from the SINS velocity error. We refer to this method as VMF 1.
3.2. Decoupling the Error of SINS Velocity
Similar to
Section 3.1, a new measurement equation containing only the SINS velocity error term can be constructed by virtual velocity. Differencing the SINS update velocity with the virtual velocity in the
n-system at the current moment yields:
The eastward and northward velocity differences are selected as the new measurement vector similar to Equation (26), as follows:
Combining Equation (32), the newly added measurement equation can be expanded as:
where
represent the
i-th row of
. Similarly, the additional measurement equation is obtained as:
where the
donates the measurement noise. The measurement matrix
can be written as follows:
Combining
with
of Equation (20) as the new measurement model:
The measurement matrix
can be expanded as follows:
Similarly, since the newly added measurement Equation (34) only contains the item of SINS velocity error, the current velocity is decoupled from the SINS velocity error after adding the new measurement equation, naming it the VMF 2.
3.3. The Structure and Analysis of the SINS/DVL Integrated Navigation System
System structure of the common KF and VMFs for the SINS/DVL integrated navigation system are shown in
Figure 1. The common KF uses the SINS update velocity with the DVL measured velocity projected in n-frame for velocity matching, and the SINS update height and PS measured depth information for position matching. During the navigation process, the term of ocean current velocity has been ignored and regarded as a part of the SINS velocity error. Both the VMF 1 and 2 have added new measurement equations to (19) by constructing virtual measurement information as shown in Equations (27) and (34), respectively. The newly added measurement equations have both decoupled the ocean current velocity from the SINS velocity error.
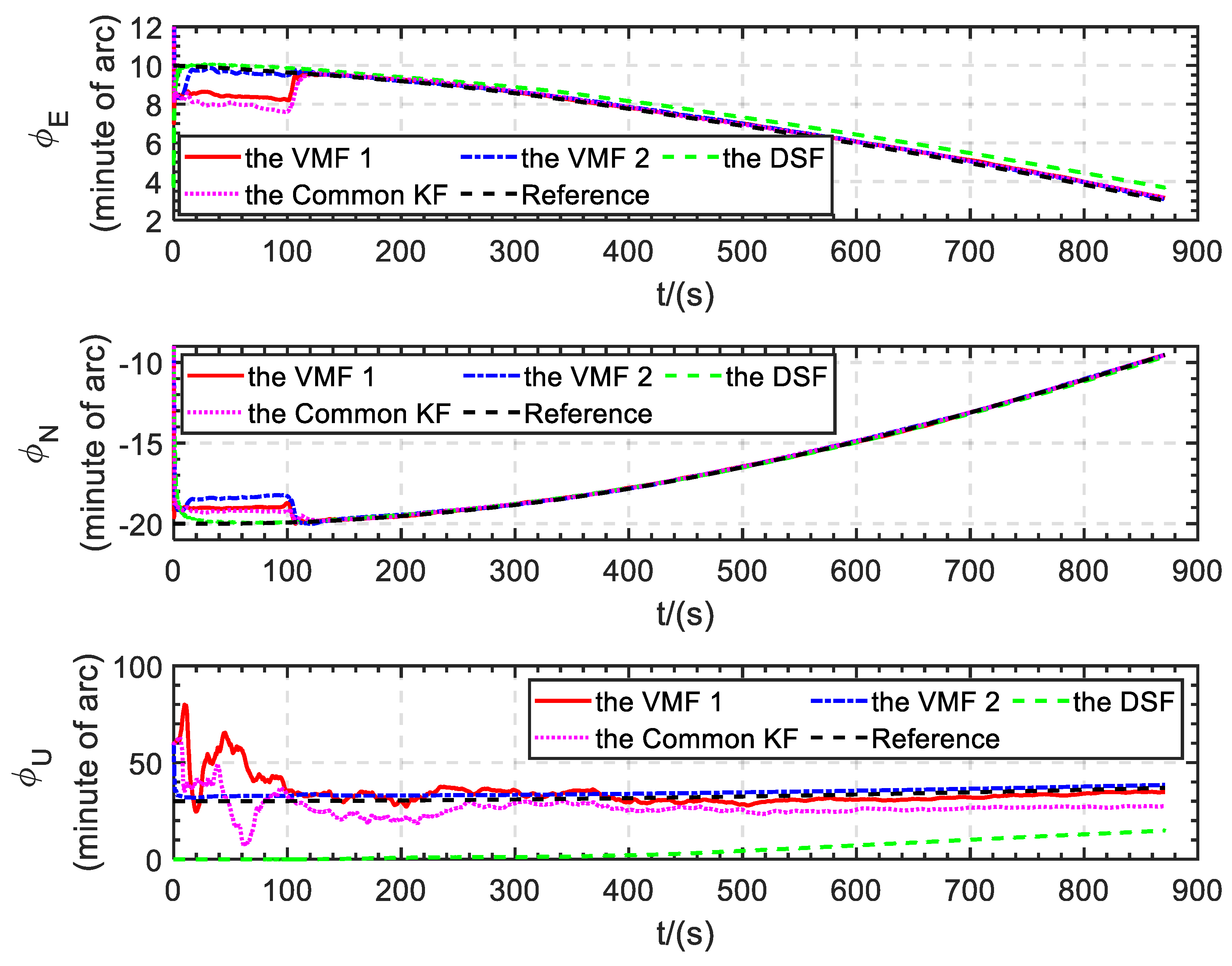
In addition, it can be seen from the new augmented measurement Equation (25) of VMF 1 that the velocity of DVL in the b-frame has been projected to the n-frame by the modified attitude matrix , which has taken an approximate expression as . In contrast, the new augmented measurement equation of VMF 2, Equation (32), did not involve the approximation of attitude information. Thus, the estimation capability of the attitude angle of the VMF 1 algorithm is weaker than that of VMF 2. Meanwhile, in the measurement equation shown in Equation (25), no error accumulated over time in the velocity measured by DVL in the b-frame. In contrast, the Equation (32) contains the accumulated SINS velocity error over time so that the VMF 1 has a better estimation capability for velocity than the VMF 2.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}