



UAV-Based Terrain Modeling in Low-Vegetation Areas: A Framework Based on Multiscale Elevation Variation Coefficients

Abstract
:1. Introduction
2. Materials and Methods
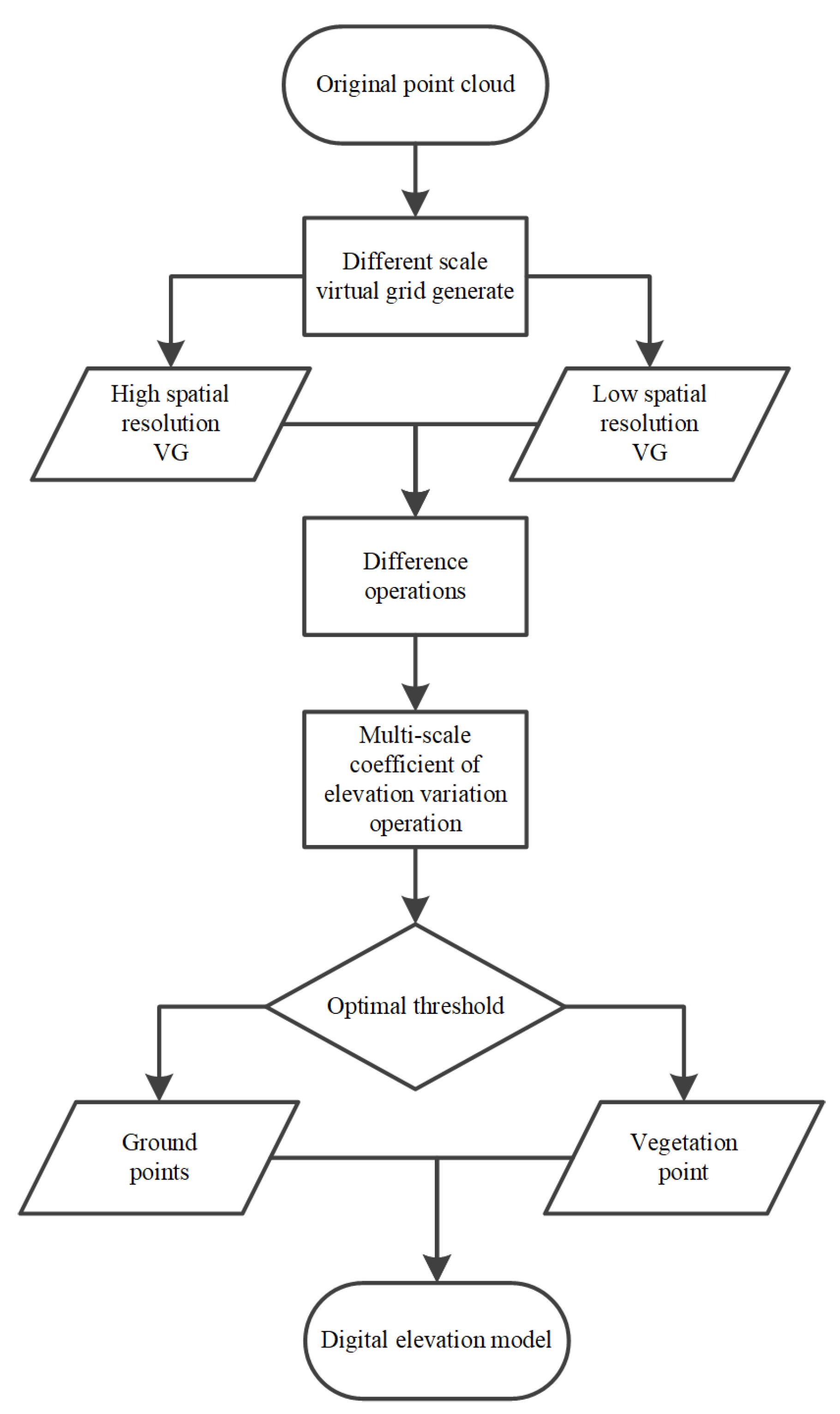
2.1. Overview
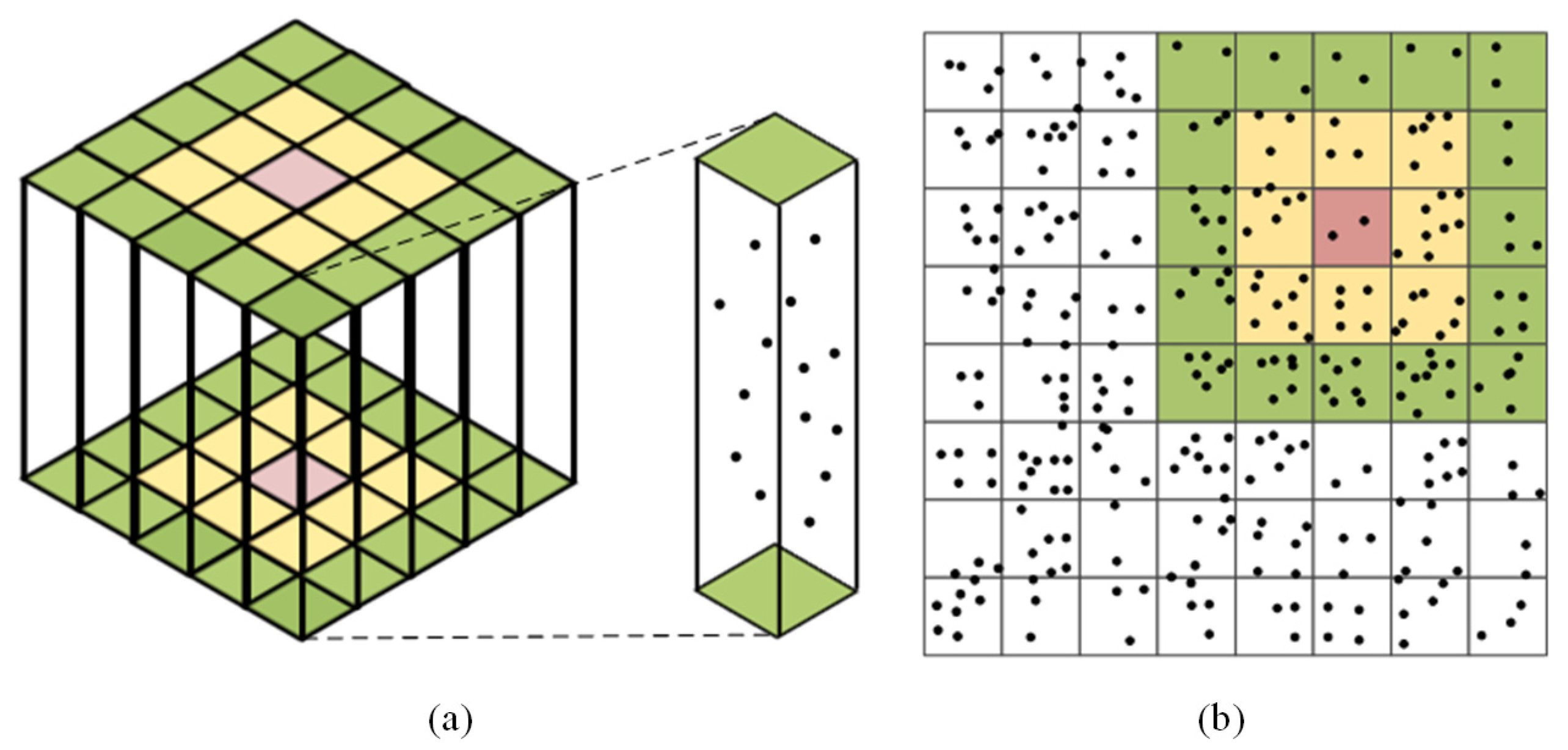
2.2. Multiscale Virtual Grid Generation
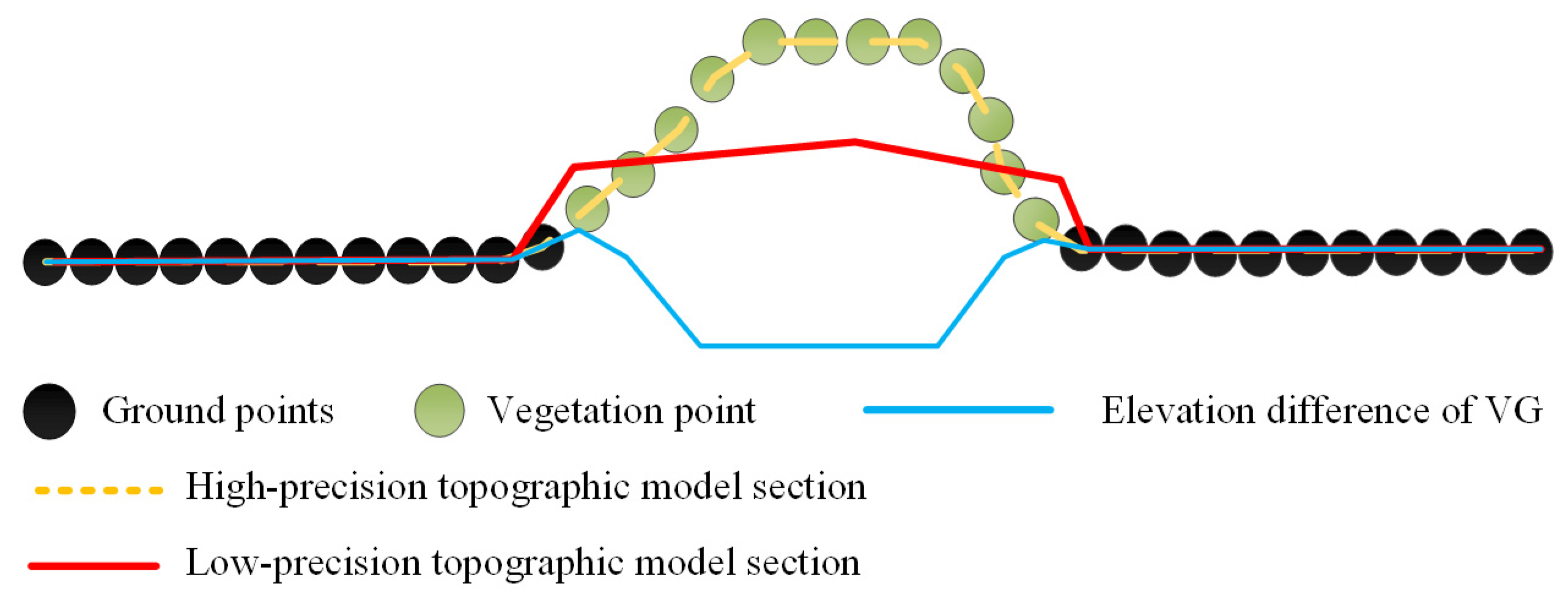
2.3. Elevation Differences
2.4. Multiscale Coefficients of Elevation Variation
2.5. Accuracy Assessment
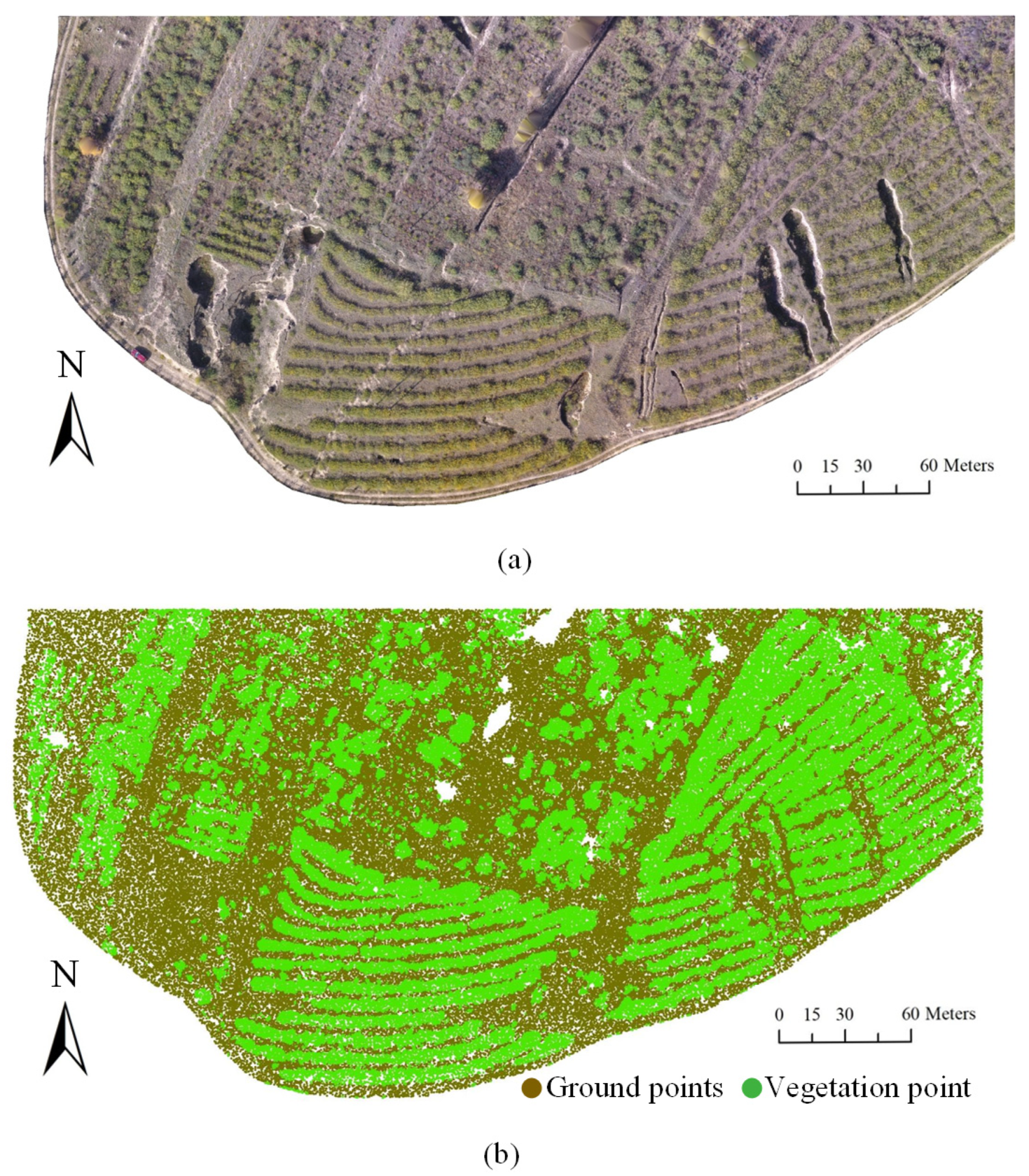
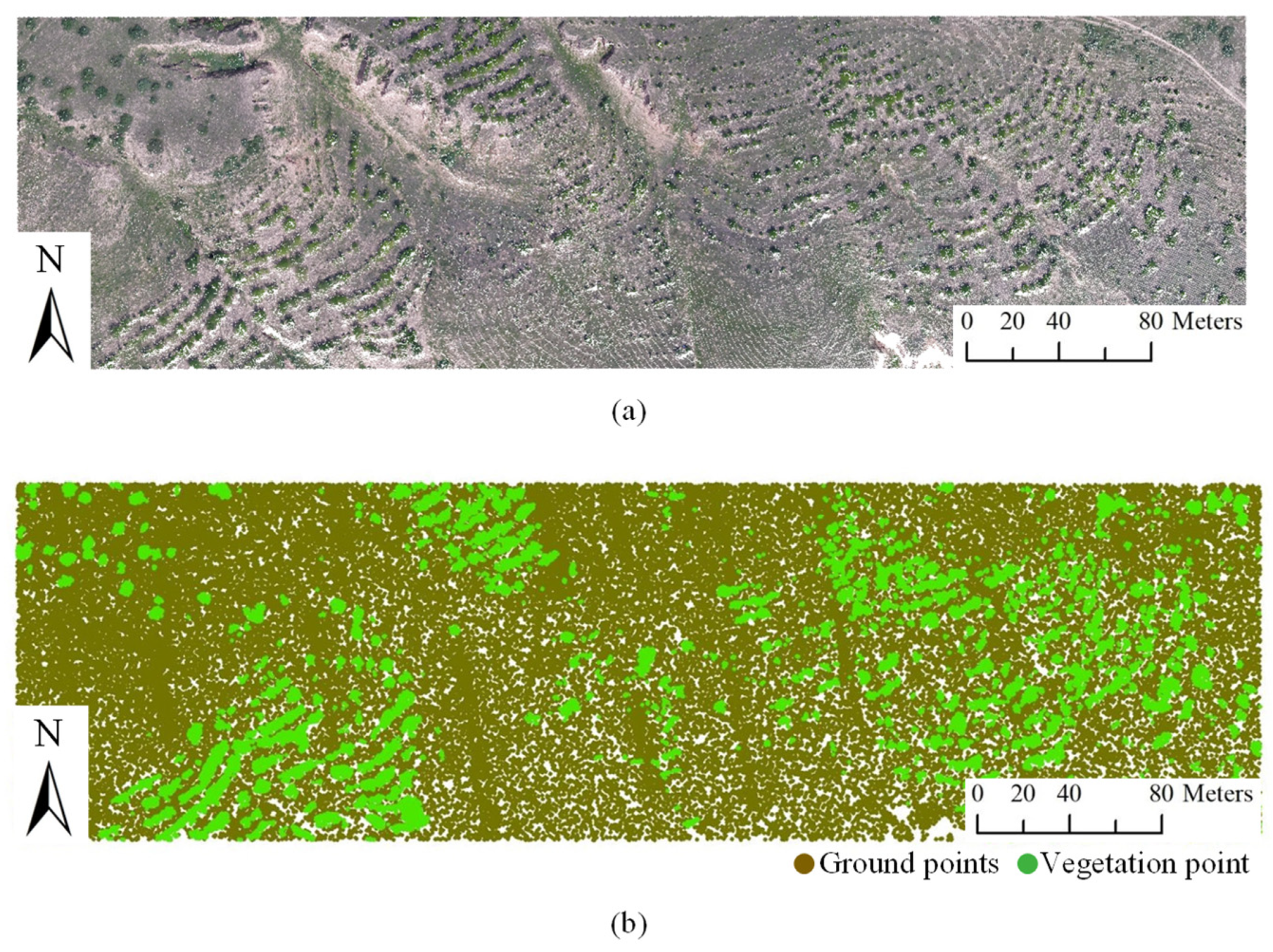
2.6. Study Areas and Data
3. Results
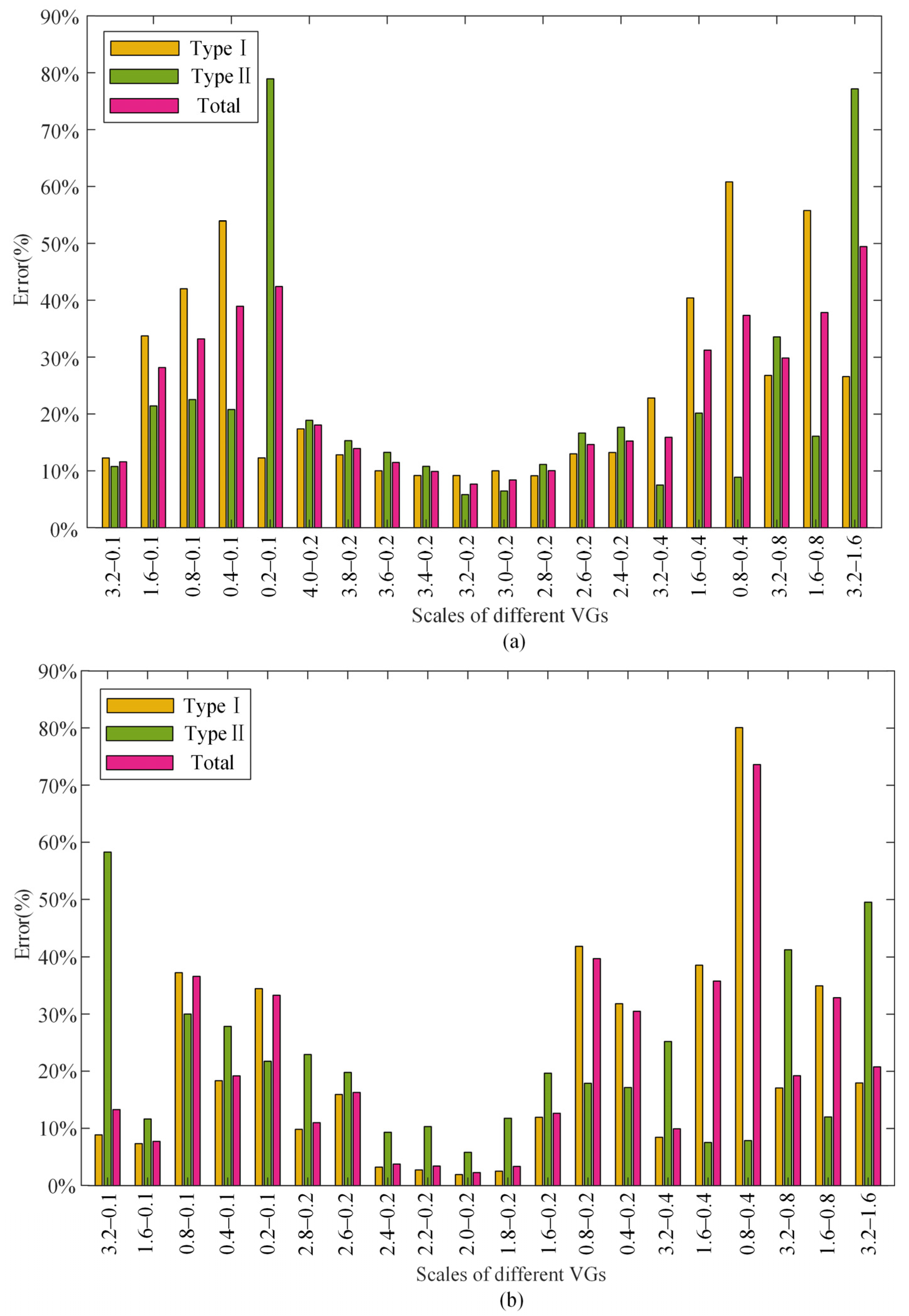
3.1. Optimal Scale of the Virtual Grid
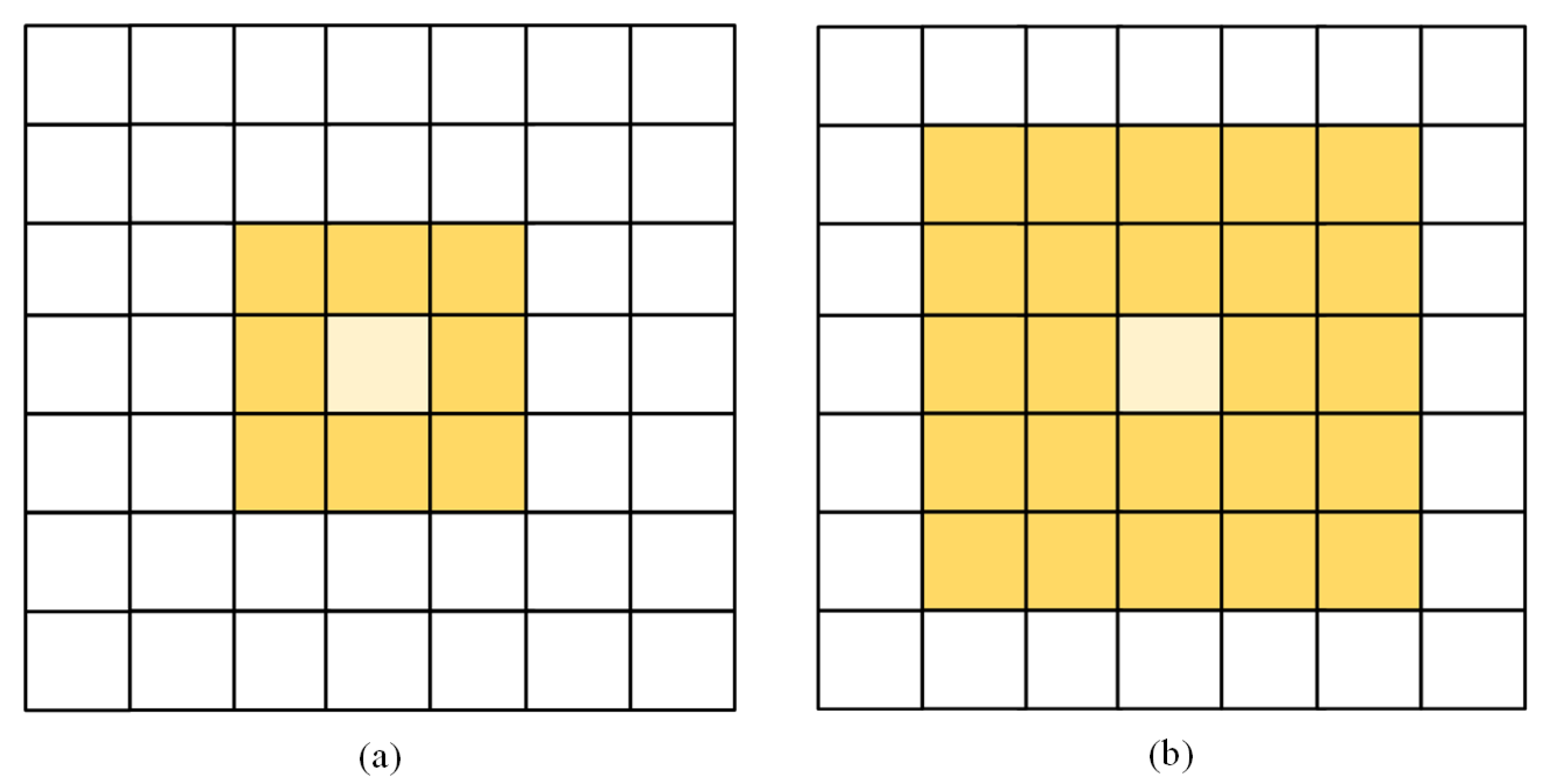
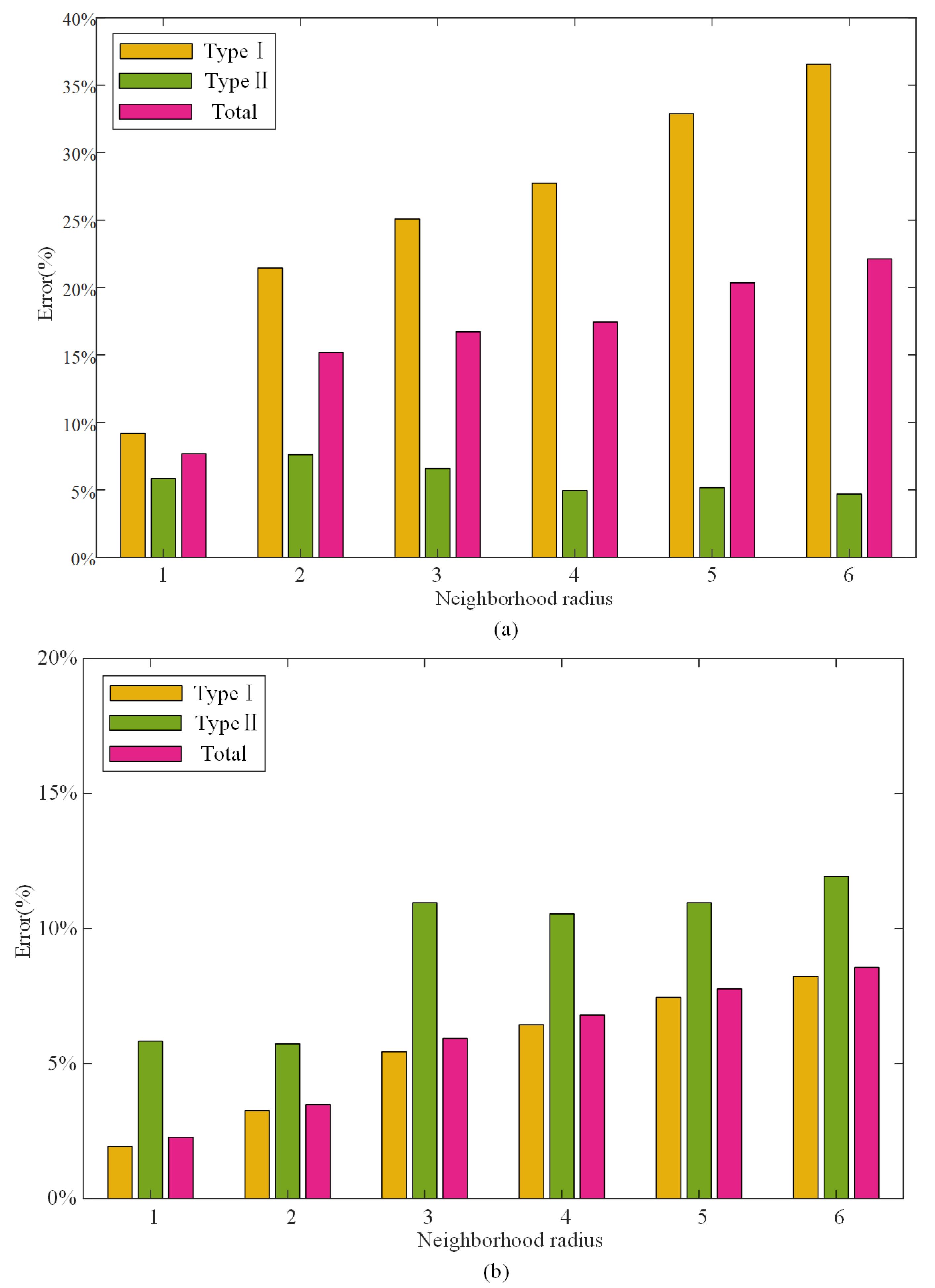
3.2. Optimal Neighborhood Radius
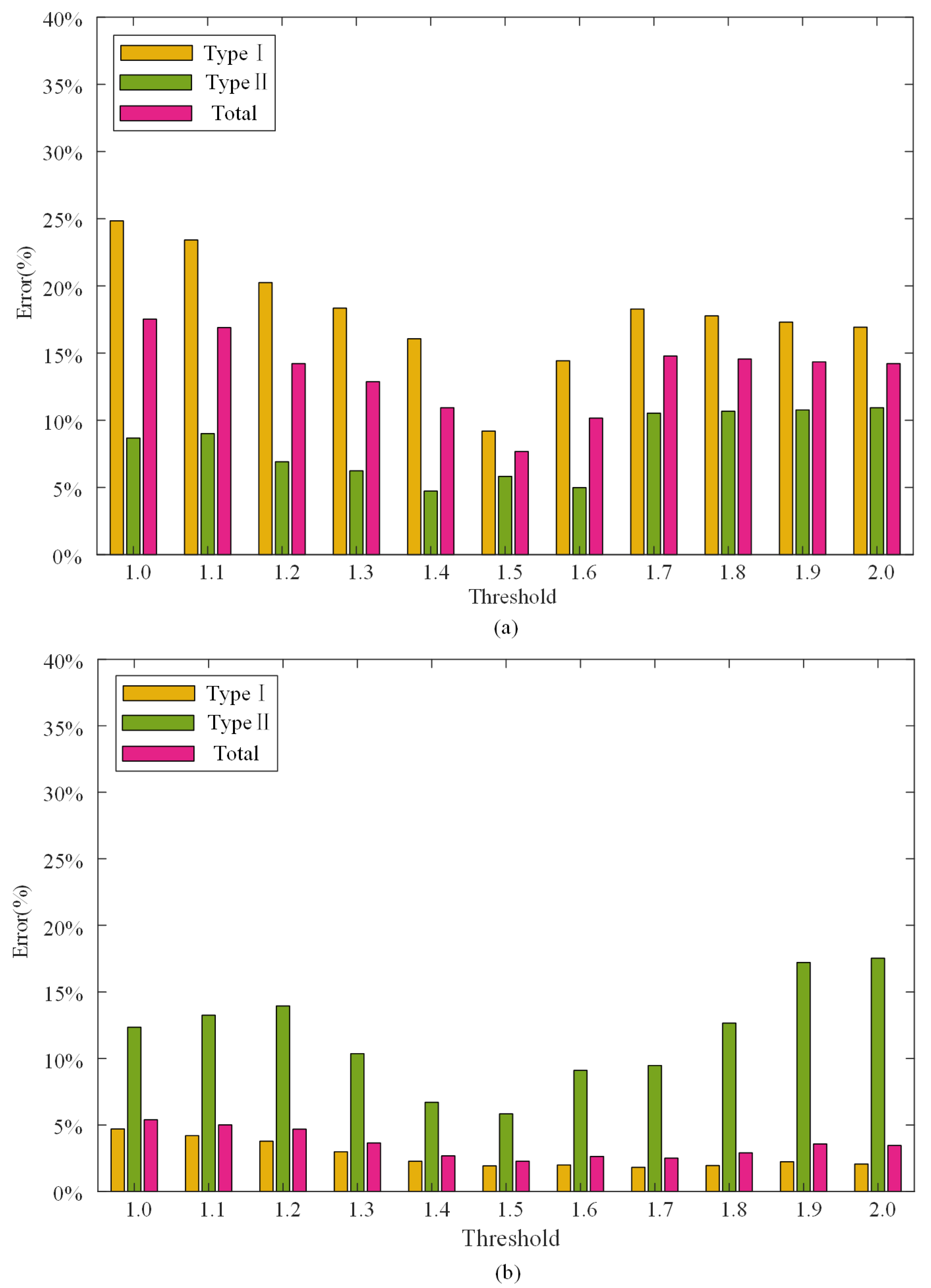
3.3. Optimal Segmentation Threshold
3.4. Accuracy Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shahbazi, M.; Menard, P.; Sohn, G.; Théau, J. Unmanned aerial image dataset: Ready for 3D reconstruction. Data Brief 2019, 25, 103962. [Google Scholar] [CrossRef] [PubMed]
- Berrett, B.E.; Vernon, C.A.; Beckstrand, H.; Pollei, M.; Markert, K.; Franke, K.W.; Hedengren, J.D. Large-scale reality modeling of a university campus using combined UAV and terrestrial photogrammetry for historical preservation and practical use. Drones 2021, 5, 136. [Google Scholar] [CrossRef]
- Dai, W.; Qian, W.; Liu, A.; Wang, C.; Yang, X.; Hu, G.; Tang, G. Monitoring and modeling sediment transport in space in small loess catchments using UAV-SfM photogrammetry. CATENA 2022, 214, 106244. [Google Scholar] [CrossRef]
- Dai, W.; Tang, G.; Hu, G.; Yang, X.; Xiong, L.; Wang, L. Modelling sediment transport in space in a watershed based on topographic change detection by UAV survey. Prog. Geogr. 2021, 40, 1570–1580. [Google Scholar] [CrossRef]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef] [Green Version]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar]
- Yang, Y.B.; Zhang, N.N.; Li, X.L. Adaptive slope filtering for airborne Light Detection and Ranging data in urban areas based on region growing rule. Emp. Surv. Rev. 2016, 49, 139–146. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Dong, Y.; Cui, X.; Zhang, L.; Ai, H. An Improved Progressive TIN Densification Filtering Method Considering the Density and Standard Variance of Point Clouds. Int. J. Geo-Inf. 2018, 7, 409. [Google Scholar] [CrossRef] [Green Version]
- Véga, C.; Durrieu, S.; Morel, J.; Allouis, T. A sequential iterative dual-filter for Lidar terrain modeling optimized for complex forested environments. Comput. Geosci. 2012, 44, 31–41. [Google Scholar] [CrossRef]
- Hui, Z.; Jin, S.; Xia, Y.; Nie, Y.; Li, N. A mean shift segmentation morphological filter for airborne LiDAR DTM extraction under forest canopy. Opt. Laser Technol. 2021, 136, 106728. [Google Scholar] [CrossRef]
- Chen, Q.; Gong, P.; Baldocchi, D.; Xie, G. Filtering airborne laser scanning data with morphological methods. Photogramm. Eng. Remote Sens. 2007, 73, 175. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Liu, L.; Dong, J.; Fu, X.; Huang, F. SPGCN: Ground filtering method based on superpoint graph convolution neural network for vehicle LiDAR. J. Appl. Remote Sens. 2022, 16, 016512. [Google Scholar] [CrossRef]
- Yilmaz, V. Automated ground filtering of LiDAR and UAS point clouds with metaheuristics. Opt. Laser Technol. 2021, 138, 106890. [Google Scholar] [CrossRef]
- Sithole, G. Filtering of Laser Altimetry Data using a Slope Adaptive Filter. Int. Arch. Photogramm. Remote Sens. 2011, 34, 203–210. [Google Scholar]
- Chen, C.; Chang, B.; Li, Y.; Shi, B. Filtering airborne LiDAR point clouds based on a scale-irrelevant and terrain-adaptive approach. Measurement 2021, 171, 108756. [Google Scholar] [CrossRef]
- Xia, T.; Yang, J.; Chen, L. Automated semantic segmentation of bridge point cloud based on local descriptor and machine learning. Autom. Constr. 2022, 133, 103992. [Google Scholar] [CrossRef]
- Chen, C.; Guo, J.; Wu, H.; Li, Y.; Shi, B. Performance comparison of filtering algorithms for high-density airborne Lidar point clouds over complex landscapes. Remote Sens. 2021, 13, 2663. [Google Scholar] [CrossRef]
- Kláptě, P.; Fogl, M.; Barták, V.; Gdulová, K.; Urban, R.; Moudr, V. Sensitivity analysis of parameters and contrasting performance of ground filtering algorithms with UAV photogrammetry-based and LiDAR point clouds. Int. J. Digit. Earth 2020, 13, 23. [Google Scholar] [CrossRef]
- Li, H.; Ye, W.; Liu, J.; Tan, W.; Pirasteh, S.; Fatholahi, S.N.; Li, J. High-resolution terrain modeling using airborne lidar data with transfer learning. Remote Sens. 2021, 13, 3448. [Google Scholar] [CrossRef]
- Dai, W.; Yang, X.; Na, J.; Li, J.; Brus, D.; Xiong, L.; Tang, G.; Huang, X. Effects of DEM resolution on the accuracy of gully maps in loess hilly areas. CATENA 2019, 177, 114–125. [Google Scholar] [CrossRef]
- Li, S.; Dai, W.; Xiong, L.; Tang, G. Uncertainty of the morphological feature expression of loess erosional gully affected by DEM resolution. J. Geo-Inf. Sci. 2020, 22, 338–350. [Google Scholar]
- Xiong, L.; Li, S.; Tang, G.; Strobl, J. Geomorphometry and terrain analysis: Data, methods, platforms and applications. Earth-Sci. Rev. 2022, 233, 104191. [Google Scholar] [CrossRef]
- Cai, S.; Liang, X.; Yu, S. A Progressive Plane Detection Filtering Method for Airborne LiDAR Data in Forested Landscapes. Forests 2023, 14, 498. [Google Scholar] [CrossRef]
- Song, D. A Filtering Method for LiDAR Point Cloud Based on Multi-Scale CNN with Attention Mechanism. Remote Sens. 2022, 14, 6170. [Google Scholar]
- Hui, Z.; Hu, Y.; Yevenyo, Y.Z.; Yu, X. An Improved Morphological Algorithm for Filtering Airborne LiDAR Point Cloud Based on Multi-Level Kriging Interpolation. Remote Sens. 2016, 8, 35. [Google Scholar] [CrossRef] [Green Version]
- Bailey, G.; Li, Y.; McKinney, N.; Yoder, D.; Wright, W.; Herrero, H. Comparison of Ground Point Filtering Algorithms for High-Density Point Clouds Collected by Terrestrial LiDAR. Remote Sens. 2022, 14, 4776. [Google Scholar] [CrossRef]
- Hiep, N.H.; Luong, N.D.; Ni, C.F.; Hieu, B.T.; Huong, N.L.; Duong, B.D. Factors influencing the spatial and temporal variations of surface runoff coefficient in the Red River basin of Vietnam. Environ. Earth Sci. 2023, 82, 56. [Google Scholar] [CrossRef]
- Huang, F.; Yang, J.; Zhang, B.; Li, Y.; Huang, J.; Chen, N. Regional Terrain Complexity Assessment Based on Principal Component Analysis and Geographic Information System: A Case of Jiangxi Province, China. Int. J. Geo-Inf. 2020, 9, 539. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Report: ISPRS Comparison Of Filters; ISPRS Commission III, Working Group: Enschede, The Netherlands, 2003. [Google Scholar]
- Wang, Y.; Koo, K.-Y. Vegetation Removal on 3D Point Cloud Reconstruction of Cut-Slopes Using U-Net. Appl. Sci. 2021, 12, 395. [Google Scholar] [CrossRef]
- Ma, H.; Zhou, W.; Zhang, L. DEM refinement by low vegetation removal based on the combination of full waveform data and progressive TIN densification. ISPRS J. Photogramm. Remote Sens. 2018, 146, 260–271. [Google Scholar] [CrossRef]
- Ren, Y.; Li, T.; Xu, J.; Hong, W.; Zheng, Y.; Fu, B. Overall filtering algorithm for multiscale noise removal from point cloud data. IEEE Access 2021, 9, 110723–110734. [Google Scholar] [CrossRef]
- Wang, X.; Ma, X.; Yang, F.; Su, D.; Qi, C.; Xia, S. Improved progressive triangular irregular network densification filtering algorithm for airborne LiDAR data based on a multiscale cylindrical neighborhood. Appl. Opt. 2020, 59, 6540–6550. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Huang, R.; Dong, Z.; Zang, Y.; Li, J. Two-step adaptive extraction method for ground points and breaklines from lidar point clouds. ISPRS J. Photogramm. Remote Sens. 2016, 119, 373–389. [Google Scholar] [CrossRef]
- Liu, W.; Sun, J.; Li, W.; Hu, T.; Wang, P. Deep Learning on Point Clouds and Its Application: A Survey. Sensors 2019, 19, 4188. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Yuan, Y. Deep-Learning-Based Classification for DTM Extraction from ALS Point Cloud. Remote Sens. 2016, 8, 730. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Chen, S.-C.; Whitman, D.; Shyu, M.-L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Result | Sum | |
|---|---|---|---|
| Ground Points | Vegetation Points | ||
| Ground points | a | b | e = a + b |
| Vegetation points | c | d | f = c + d |
| Sum | g = a + c | h = b + d | n = a + b + c + d |
| Ground Points | Vegetation Points | ||
|---|---|---|---|
| Threshold | ( | Vegetation area | Vegetation boundary |
| Study Areas | T1 | T2 |
|---|---|---|
| Large-scale VG | 3.2 m | 2.0 m |
| Small-scale VG | 0.2 m | 0.2 m |
| Neighborhood radius | 1 grid | 1 grid |
| Threshold | 1.5 | 1.5 |
| Reference | Result | Sum | Error (%) | ||
|---|---|---|---|---|---|
| Ground Points | Vegetation Points | ||||
| T1 | Ground points | 2,215,181 | 224,442 | 2,439,623 | Type I: 9.20 |
| Vegetation points | 117,420 | 1,896,071 | 2,013,491 | Type II: 5.83 | |
| Sum | 2,332,601 | 2,120,513 | 4,453,114 | Total: 7.68 | |
| T2 | Ground points | 705,636 | 13,893 | 719,529 | Type I: 1.93 |
| Vegetation points | 4130 | 66,601 | 70,731 | Type II: 5.84 | |
| Sum | 709,766 | 80,494 | 790,260 | Total: 2.28 | |
| Sample | Error | Our Method | CSF | TIN | PMF |
|---|---|---|---|---|---|
| Xining | Type I (%) | 9.20 | 8.66 | 22.32 | 1.64 |
| Type II (%) | 5.83 | 17.41 | 7.72 | 12.70 | |
| Total (%) | 7.68 | 12.62 | 15.72 | 6.64 | |
| Yulin | Type I (%) | 1.93 | 3.01 | 2.46 | 2.57 |
| Type II (%) | 5.84 | 10.45 | 27.62 | 27.73 | |
| Total (%) | 2.28 | 5.97 | 4.71 | 4.82 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, J.; Dai, W.; Wang, B.; Li, J.; Yao, J.; Chen, K. UAV-Based Terrain Modeling in Low-Vegetation Areas: A Framework Based on Multiscale Elevation Variation Coefficients. Remote Sens. 2023, 15, 3569. https://doi.org/10.3390/rs15143569
Fan J, Dai W, Wang B, Li J, Yao J, Chen K. UAV-Based Terrain Modeling in Low-Vegetation Areas: A Framework Based on Multiscale Elevation Variation Coefficients. Remote Sensing. 2023; 15(14):3569. https://doi.org/10.3390/rs15143569
Chicago/Turabian StyleFan, Jiaxin, Wen Dai, Bo Wang, Jingliang Li, Jiahui Yao, and Kai Chen. 2023. "UAV-Based Terrain Modeling in Low-Vegetation Areas: A Framework Based on Multiscale Elevation Variation Coefficients" Remote Sensing 15, no. 14: 3569. https://doi.org/10.3390/rs15143569