

A GNSS Spoofing Detection and Direction-Finding Method Based on Low-Cost Commercial Board Components
 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
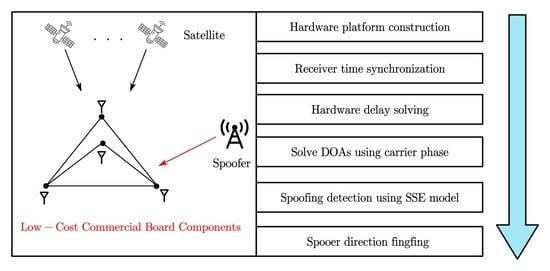
2.1. System Structure
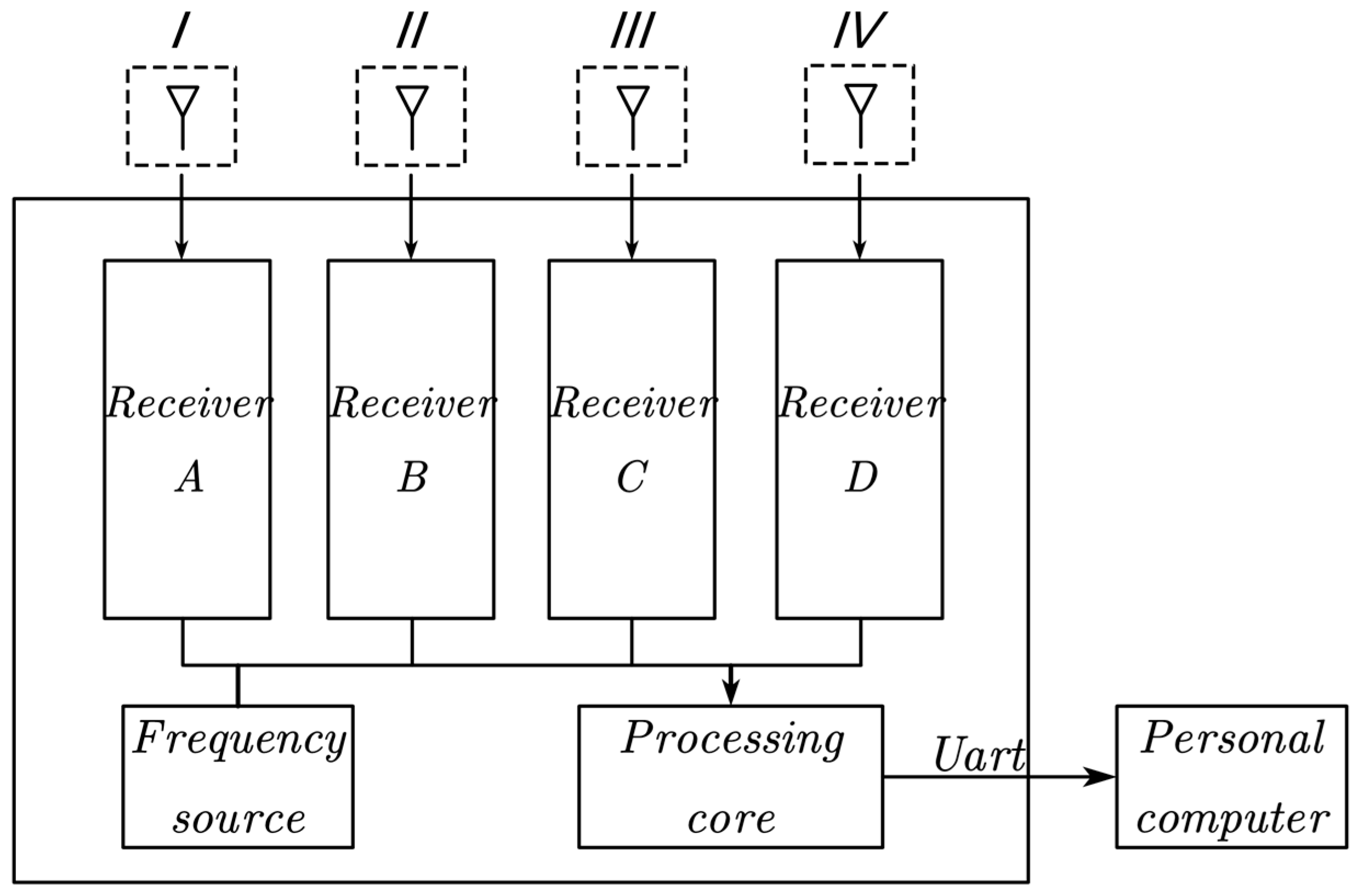
2.1.1. Hardware Structure
2.1.2. Algorithm Process
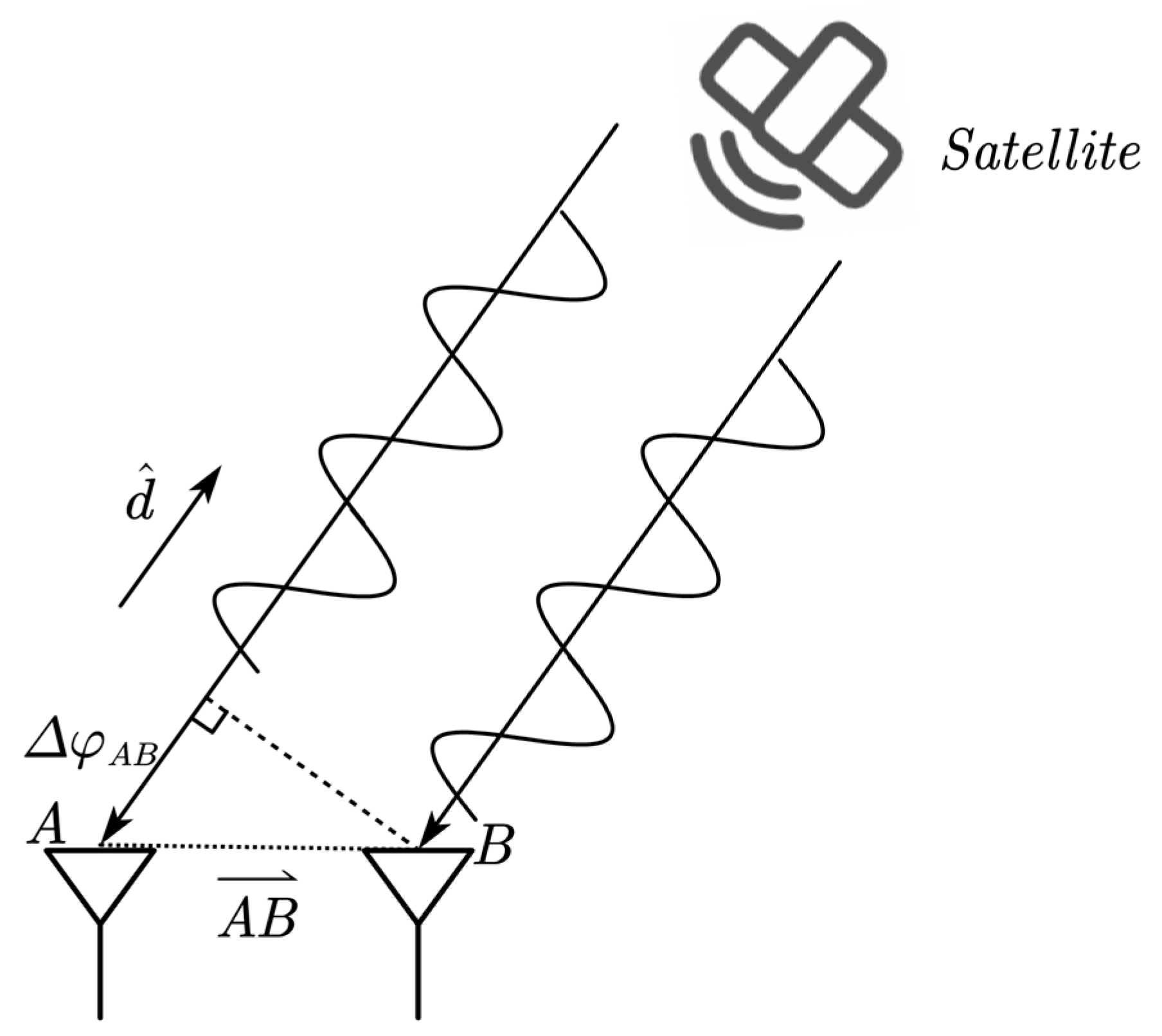
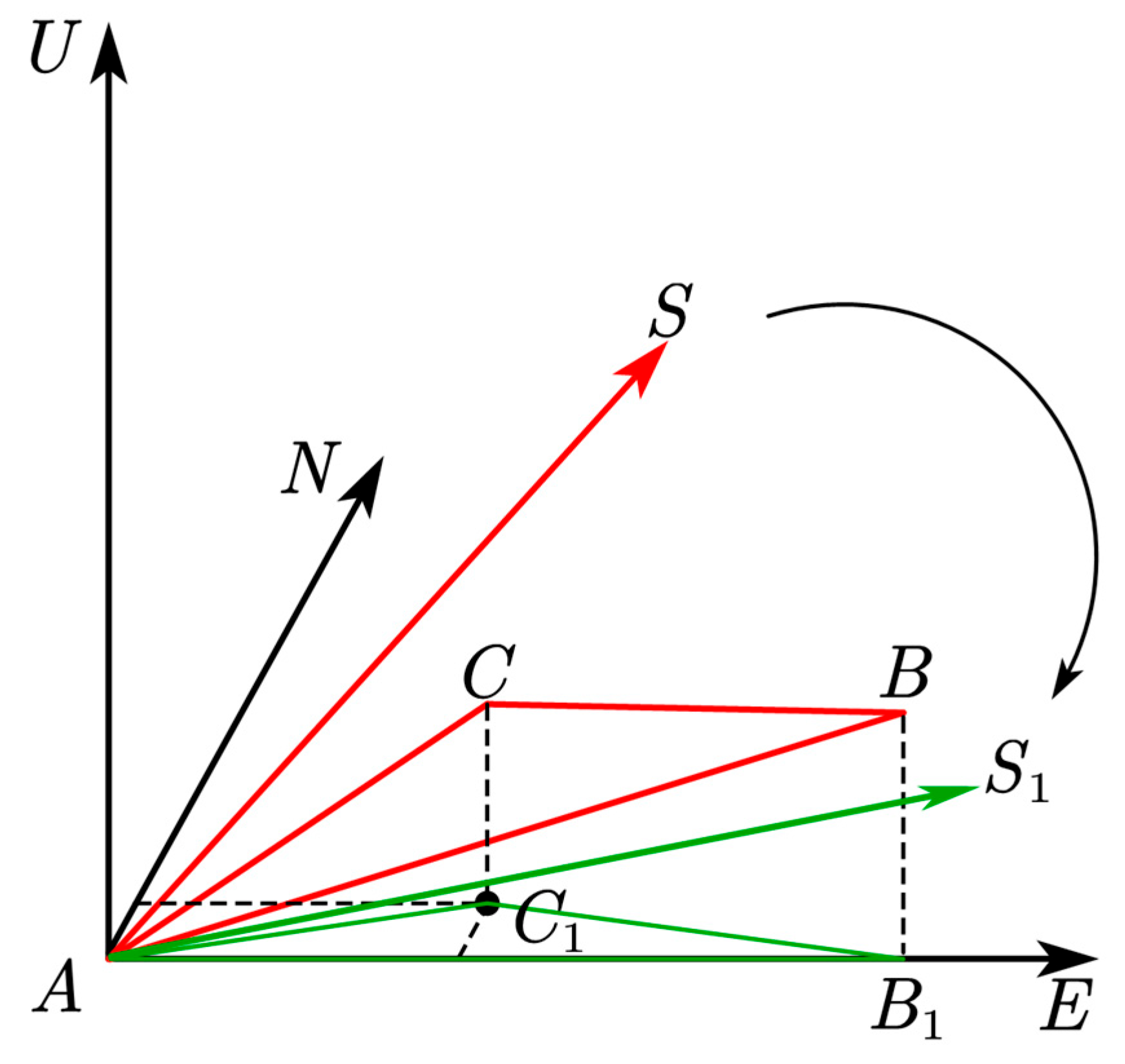
2.2. DOA Calculation
2.3. Carrier Single Difference Solution
2.4. Anti-Spoofing Method
3. Experiments and Results
3.1. Experimental Scenario
3.2. Experimental Results
3.2.1. Error Calibration Results
3.2.2. False Alarm Experimental Results
3.2.3. Spoofing Experiments Results
4. Discussion
4.1. Discussion on Error Calibration Results
4.2. Discussion on False Alarm Experimental Results
4.3. Discussion on Spoofing Experiments Results
4.4. Advantages and Disadvantages
5. Conclusions
- (1)
- Low-cost commercial board components can be used for large-scale deployment and implementation due to their low-cost and low-complexity algorithms, with high feasibility and potential application value;
- (2)
- Compared with professional equipment, low-cost commercial board components must solve two problems in anti-spoofing applications, namely, power-on clock error and hardware delay. The hardware delay includes cable delay error, multipath error, and antenna phase center error. In this paper, the influence of the two problems on the carrier difference is theoretically deduced, and the corresponding error correction method is proposed. Aiming at the power-on clock error, it is proposed to use pseudo-range and instantaneous Doppler values to correct it. For the hardware delay error, this paper uses the method of depicting the time-series average sky map to compensate for it. Finally, an experiment is carried out on the error term, and the experimental results are consistent with the theoretical derivation and the actual situation;
- (3)
- In the anti-spoofing method, a binary hypothesis testing model is constructed. With a certain false alarm rate, a 100% spoofing detection rate is achieved. Additionally, all spoofing signals are identified. Furthermore, the direction information of the spoofer is obtained under the spoofing condition. The direction error is within 5° range, achieving high accuracy.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, T.; Zhang, B.; Yuan, Y.; Li, M. Real-Time Precise Point Positioning (RTPPP) with raw observations and its application in real-time regional ionospheric VTEC modeling. J. Geod. 2018, 92, 1267–1283. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, K.; Yang, C.; Li, Z.; Zhou, F.; Liu, D. GNSS/INS/OD/NHC Adaptive Integrated Navigation Method Considering the Vehicle Motion State. IEEE Sens. J. 2023. [Google Scholar] [CrossRef]
- Ghiasi, Y.; Duguay, C.R.; Murfitt, J.; van der Sanden, J.J.; Thompson, A.; Drouin, H.; Prévost, C. Application of GNSS Interferometric Reflectometry for the Estimation of Lake Ice Thickness. Remote Sens. 2020, 12, 2721. [Google Scholar] [CrossRef]
- Gholamrezaee, S.; Bagherbandi, M.; Parvazi, K.; Farzaneh, S. A study on the quality of GNSS signals for extracting the sea level height and tidal frequencies utilizing the GNSS-IR approach. GPS Solut. 2023, 27, 72. [Google Scholar] [CrossRef]
- Psiaki, M.L.; O’Hanlon, B.W.; Powell, S.P.; Bhatti, J.A.; Wesson, K.D.; Schofield, T.E. GNSS spoofing detection using two-antenna differential carrier phase. In Proceedings of the 27th international technical meeting of the satellite division of the Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 2776–2800. [Google Scholar]
- Shepard, D.P.; Humphreys, T.E.; Fansler, A.A. Evaluation of the vulnerability of phasor measurement units to GPS spoofing attacks. Int. J. Crit. Infrastruct. Prot. 2012, 5, 146–153. [Google Scholar] [CrossRef]
- Psiaki, M.; Humphreys, T. Civilian GNSS Spoofing, Detection, and Recovery. Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; John Wiley & Sons: Hoboken, NJ, USA, 2021; pp. 655–680. [Google Scholar]
- Mit, R.; Zangvil, Y.; Katalan, D. Analyzing tesla‘s level 2 autonomous driving system under different gnss spoofing scenarios and implementing connected services for authentication and reliability of gnss data. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2020), Online, 22–25 September 2020; pp. 621–646. [Google Scholar]
- Geng, Z. Study on GNSS Spoofing Detection and Mitigation Techoniques; National University of Defense Technology: Changsha, China, 2019. [Google Scholar]
- Chen, X.; Luo, R.; Liu, T.; Yuan, H.; Wu, H. Satellite Navigation Signal Authentication in GNSS: A Survey on Technology Evolution, Status, and Perspective for BDS. Remote Sens. 2023, 15, 1462. [Google Scholar] [CrossRef]
- Lee, J.-H.; Kwon, K.-C.; An, D.-S.; Shim, D.-S. GPS spoofing detection using accelerometers and performance analysis with probability of detection. Int. J. Control Autom. Syst. 2015, 13, 951–959. [Google Scholar] [CrossRef]
- Spoljar, D.; Lenac, K.; Zigman, D.; Marović, M. A Mobile Network-Based GNSS Anti-Spoofing. In Proceedings of the 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018; pp. 1–3. [Google Scholar]
- Vagle, N.; Broumandan, A.; Lachapelle, G. Multiantenna GNSS and inertial sensors/odometer coupling for robust vehicular navigation. IEEE Internet Things J. 2018, 5, 4816–4828. [Google Scholar] [CrossRef]
- Qiao, Y.; Zhang, Y.; Du, X. A vision-based GPS-spoofing detection method for small UAVs. In Proceedings of the 2017 13th International Conference on Computational Intelligence and Security (CIS), Hong Kong, China, 15–18 December 2017; pp. 312–316. [Google Scholar]
- Dehghanian, V.; Nielsen, J.; Lachapelle, G. GNSS spoofing detection based on receiver C/No estimates. In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2878–2884. [Google Scholar]
- Yuan, D.; Li, H.; Wang, F.; Lu, M. A GNSS acquisition method with the capability of spoofing detection and mitigation. Chin. J. Electron. 2018, 27, 213–222. [Google Scholar] [CrossRef]
- Brown, R.G. A baseline GPS RAIM scheme and a note on the equivalence of three RAIM methods. Navigation 1992, 39, 301–316. [Google Scholar] [CrossRef]
- Ji, N.; Rao, Y.; Wang, X.; Zou, D.; Chen, X.; Guo, Y. Spoofing Traction Strategy Based on the Generation of Traction Code. Remote Sens. 2023, 15, 500. [Google Scholar] [CrossRef]
- Huang, L.; Yong, L.; Xu, B.; Wang, F. Analysis of carry phase difference detection for satellite navigation receivers anti-spoofing. J. Natl. Univ. Def. Technol. 2016, 38, 103–106. [Google Scholar]
- Swaszek, P.F.; Hartnett, R.J. A Multiple COTS Receiver GNSS Spoof Detector—Extensions. In Proceedings of the 2014 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 27–29 January 2014; pp. 316–326. [Google Scholar]
- Chen, Z.; Li, H.; Wei, Y.; Zhou, Z.; Lu, M. GNSS antispoofing method using the intersection angle between two directions of arrival (IA-DOA) for multiantenna receivers. GPS Solut. 2023, 27, 11. [Google Scholar] [CrossRef]
- Zhang, X.; Pang, J.; Su, Y.; Ou, G. Spoofing detection technique on antenna array carrier phase double difference. J. Natl. Univ. Def. Technol. 2014, 36, 55–60. [Google Scholar]
- Roy, R.; Paulraj, A.; Kailath, T. ESPRIT—A subspace rotation approach to estimation of parameters of cisoids in noise. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 1340–1342. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Meurer, M.; Konovaltsev, A.; Cuntz, M.; Hättich, C. Robust joint multi-antenna spoofing detection and attitude estimation using direction assisted multiple hypotheses RAIM. In Proceedings of the 25th international technical meeting of the satellite division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 3007–3016. [Google Scholar]
- Cina, A.; Piras, M. Performance of low-cost GNSS receiver for landslides monitoring: Test and results. Geomat. Nat. Hazards Risk 2015, 6, 497–514. [Google Scholar] [CrossRef]
- Semler, Q.; Mangin, L.; Moussaoui, A.; Semin, E. Development of a low-cost centimetric gnss positioning solution for android applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W17, 309–314. [Google Scholar] [CrossRef]
- Guo, F. Research on High Precision Phase Center Antenna Based on Beidou Satellite Navigation System; University of Electronic Science and Technology of China: Chengdu, China, 2019. [Google Scholar]
- Marais, J.; Berbineau, M.; Heddebaut, M. Land mobile GNSS availability and multipath evaluation tool. French National Institute for Transport and Safety Research, Laboratory of Transport Electronics and Signals Processing, 59650 Villeneuve d’Ascq, France. IEEE Trans. Veh. Technol. 2005, 54, 1697–1704. [Google Scholar] [CrossRef]
- Chen, J.; Wang, J.; Yuan, H.; Xu, Y.; Chen, X.; Chen, X.; Yang, G. Performance analysis of a GNSS multipath detection and mitigation method with two low-cost antennas in RTK positioning. IEEE Sens. J. 2021, 22, 4827–4835. [Google Scholar] [CrossRef]
- Zhou, F. Theory and Methodology of Multi-GNSS Undifferenced and Uncombined Precise Point Positioning; East China Normal University: Shanghai, China, 2018. [Google Scholar]
- Wang, T.; Yao, Z.; Lu, M. Mesh topology based clock synchronization technique for pseudolite systems. Navigation 2020, 67, 619–632. [Google Scholar] [CrossRef]
- Wu, J.; Tang, X.; Ni, S.; Wang, F. The effect of GNSS receiver clock biase on double differenced carrier phase measurement. In Proceedings of the 2016 5th International Conference on Computer Science and Network Technology (ICCSNT), Changchun, China, 10–11 December 2016; pp. 762–766. [Google Scholar] [CrossRef]
- Konovaltsev, A.; Cuntz, M.; Haettich, C.; Meurer, M. Performance analysis of joint multi-antenna spoofing detection and attitude estimation. In Proceedings of the 2013 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 27–29 January 2013; pp. 864–872. [Google Scholar]
- Chen, J. GNSS Information Processing Methods and Applications Based on Two/Multiple Antenna; University of Chinese Academy of Sciences: Beijing, China, 2022. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GL1 | AB | AC | AD | |||
|---|---|---|---|---|---|---|
| Ave | Std | Ave | Std | Ave | Std | |
| G01 | 0.0123 | 0.0078 | 0.0891 | 0.0132 | 0.2016 | 0.0178 |
| G10 | 0.0093 | 0.0056 | 0.0898 | 0.0086 | 0.1987 | 0.0173 |
| G12 | 0.0119 | 0.0055 | 0.0893 | 0.0087 | 0.2012 | 0.0175 |
| G21 | 0.0144 | 0.0078 | 0.0928 | 0.0103 | 0.2024 | 0.0181 |
| G22 | 0.0090 | 0.0055 | 0.0853 | 0.0120 | 0.1982 | 0.0172 |
| G23 | 0.0121 | 0.0064 | 0.0891 | 0.0128 | 0.2021 | 0.0177 |
| G25 | 0.0130 | 0.0054 | 0.0909 | 0.0088 | 0.2016 | 0.0174 |
| G31 | 0.0114 | 0.0055 | 0.0874 | 0.0122 | 0.1985 | 0.0264 |
| G32 | 0.0114 | 0.0053 | 0.0914 | 0.0088 | 0.2011 | 0.0173 |
| G04 | 1.98 | 0.3838 | 0.3191 |
| G09 | 3.57 | 0.8474 | 0.5805 |
| G16 | 4.11 | 0.3901 | 0.4806 |
| G26 | 2.88 | 0.8492 | 0.5970 |
| G27 | 3.19 | 0.9448 | 0.5836 |
| G31 | 4.32 | 0.9099 | 0.6795 |
| G04 | 2.48 | 0.6740 | 0.4353 |
| G09 | 2.12 | 0.6646 | 0.4202 |
| G16 | 6.7 | 1.2903 | 0.9061 |
| G26 | 3.26 | 1.0334 | 0.6467 |
| G27 | 3.04 | 1.1555 | 0.6879 |
| G31 | 2.67 | 1.0958 | 0.6073 |
| Mean (°) | Std (°) | |
|---|---|---|
| G01 | 4.61 | 1.22 |
| G14 | 4.65 | 1.17 |
| G21 | 4.60 | 1.25 |
| G17 | 4.67 | 1.23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, P.; Yuan, H.; Chen, X.; Gong, Y.; Li, S.; Li, R.; Luo, R.; Zhao, G.; Fu, C.; Xu, J. A GNSS Spoofing Detection and Direction-Finding Method Based on Low-Cost Commercial Board Components. Remote Sens. 2023, 15, 2781. https://doi.org/10.3390/rs15112781
Mao P, Yuan H, Chen X, Gong Y, Li S, Li R, Luo R, Zhao G, Fu C, Xu J. A GNSS Spoofing Detection and Direction-Finding Method Based on Low-Cost Commercial Board Components. Remote Sensing. 2023; 15(11):2781. https://doi.org/10.3390/rs15112781
Chicago/Turabian StyleMao, Pengrui, Hong Yuan, Xiao Chen, Yingkui Gong, Shuhui Li, Ran Li, Ruidan Luo, Guangyao Zhao, Chengang Fu, and Jiajia Xu. 2023. "A GNSS Spoofing Detection and Direction-Finding Method Based on Low-Cost Commercial Board Components" Remote Sensing 15, no. 11: 2781. https://doi.org/10.3390/rs15112781