
An Improved Forest Height Model Using L-Band Single-Baseline Polarimetric InSAR Data for Various Forest Densities


Abstract
:1. Introduction
2. Datasets and Pre-Processing
2.1. PolSARproSim Simulated Datasets
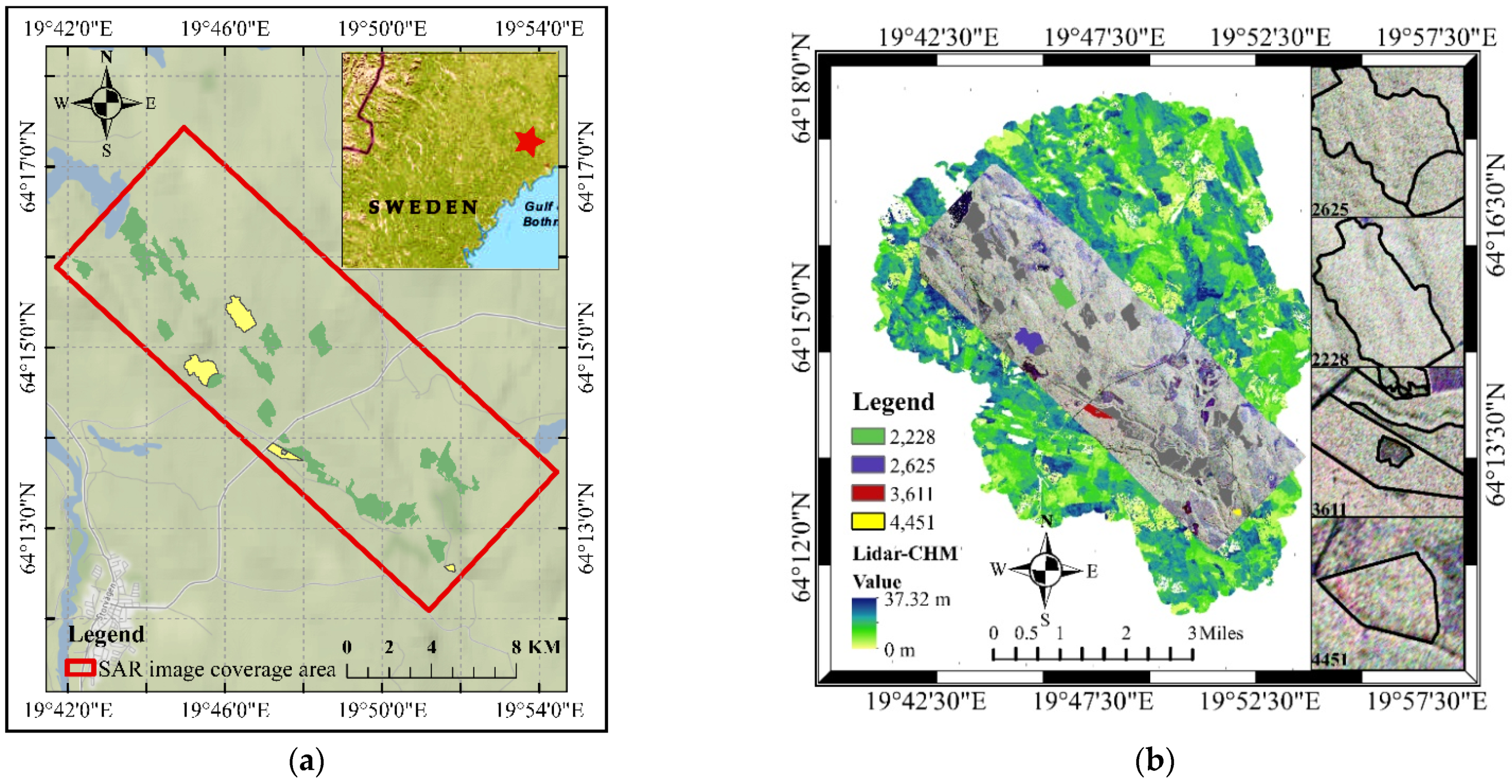
2.2. The BioSAR 2008 Datasets
3. Methodology
3.1. Typical Models for the PolInSAR Technique of Forest Height Inversion
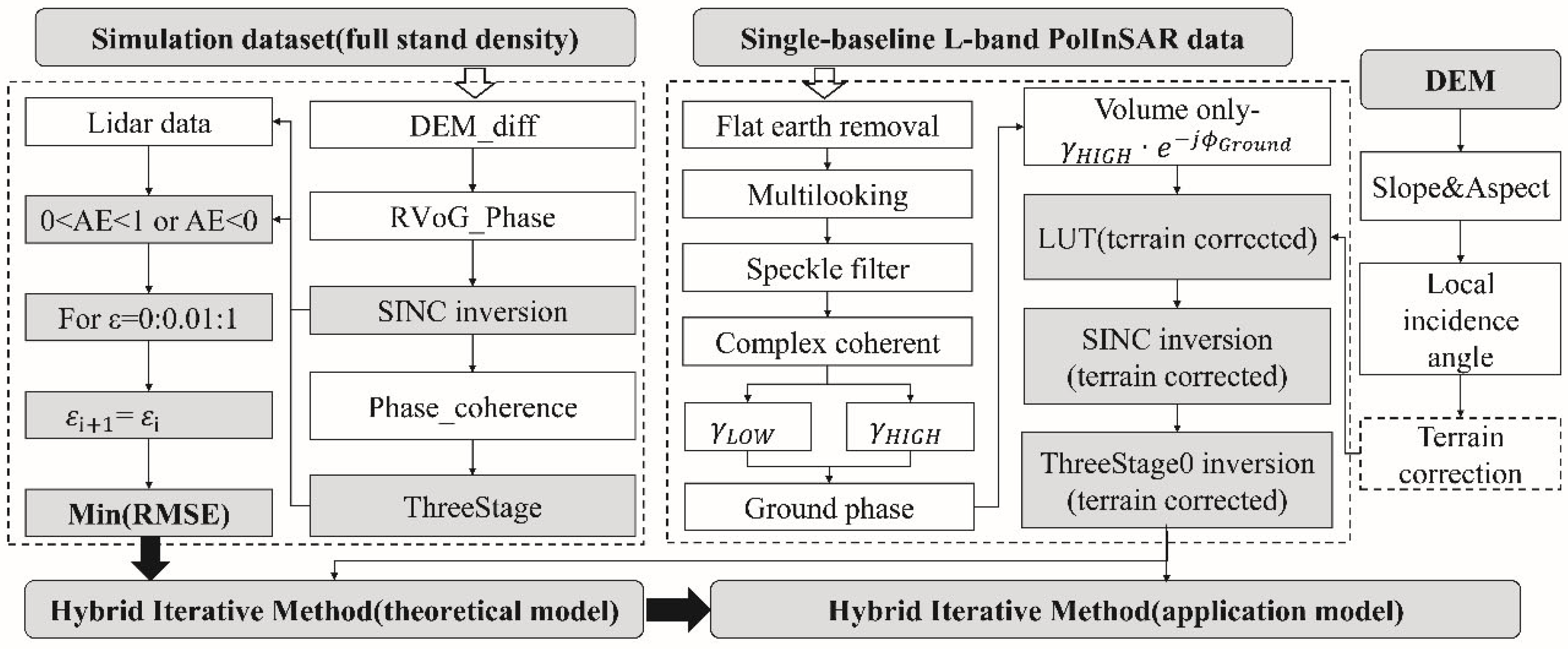
3.2. Coherence Amplitude and Three-Stage Hybrid Iterative Model
3.2.1. Coherence Amplitude and Three-Stage Hybrid Iterative Theoretical Model
3.2.2. Coherence Magnitude and Three-Stage Hybrid Iterative Application Model
4. Results
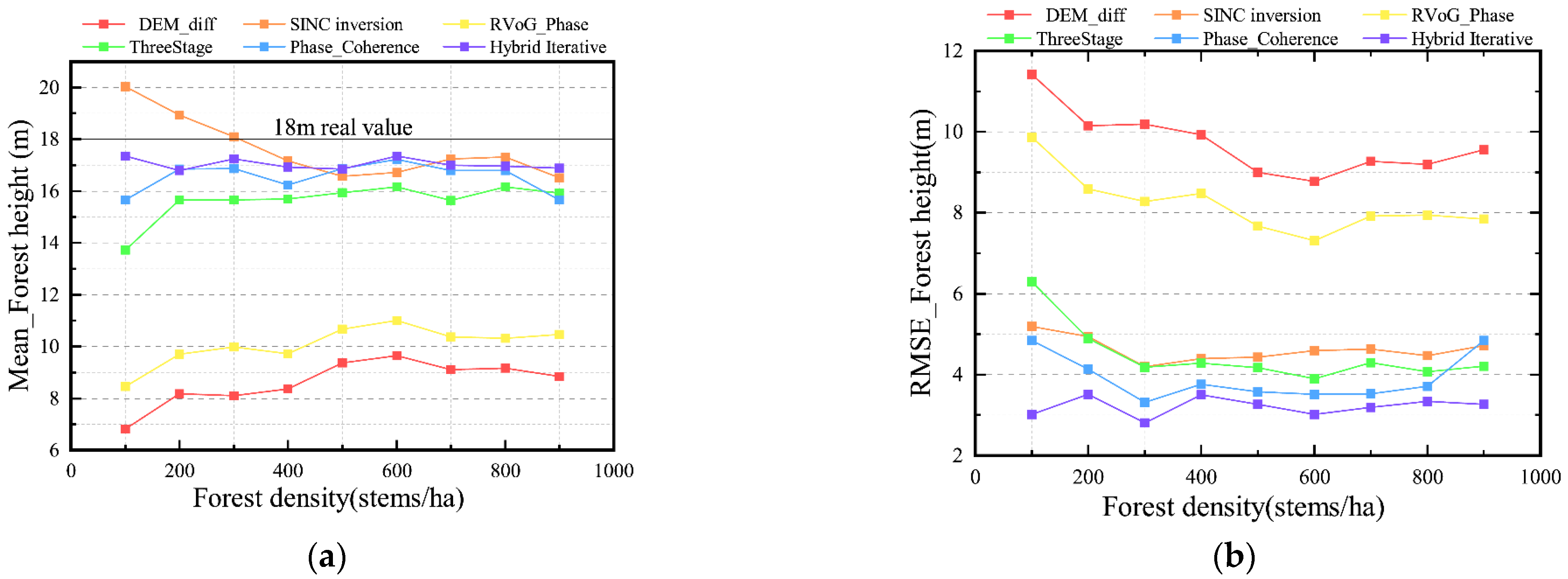
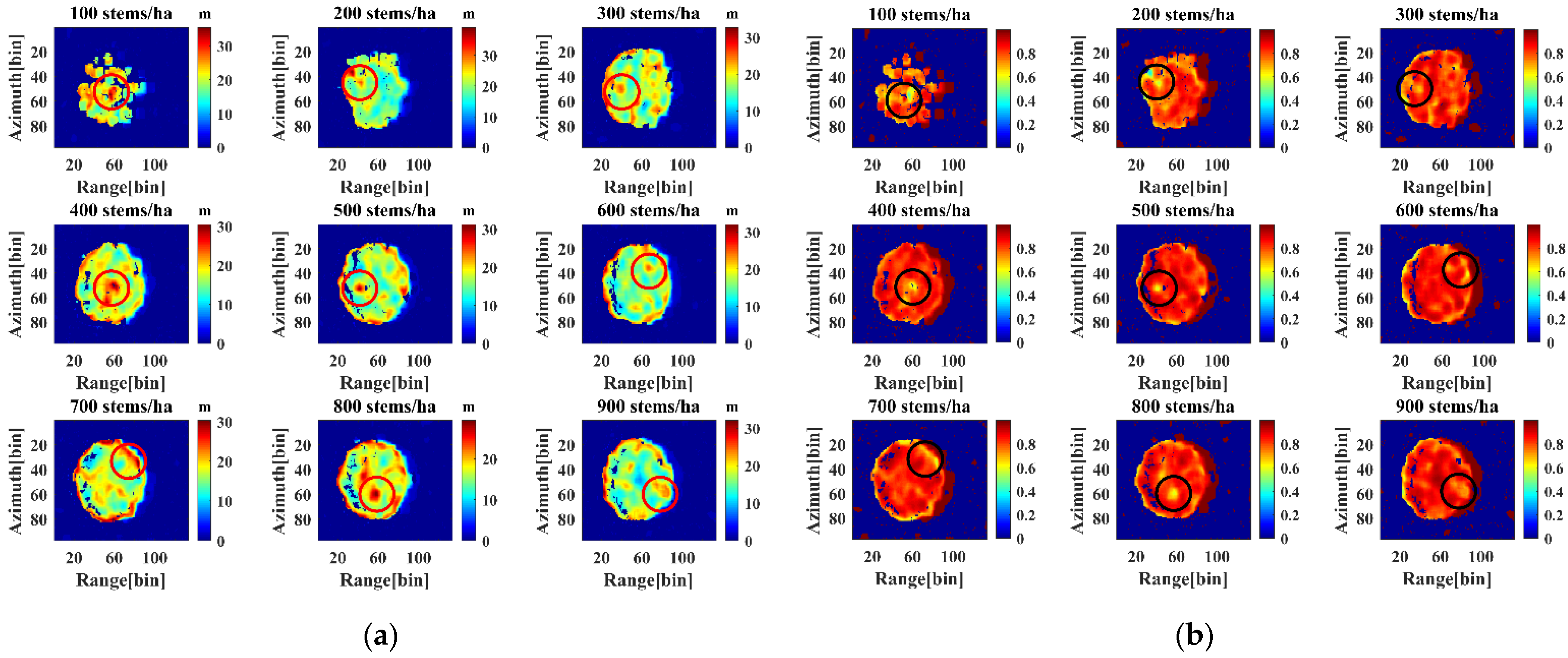
4.1. Results of the Forest Height Inversion for the Simulated Dataset
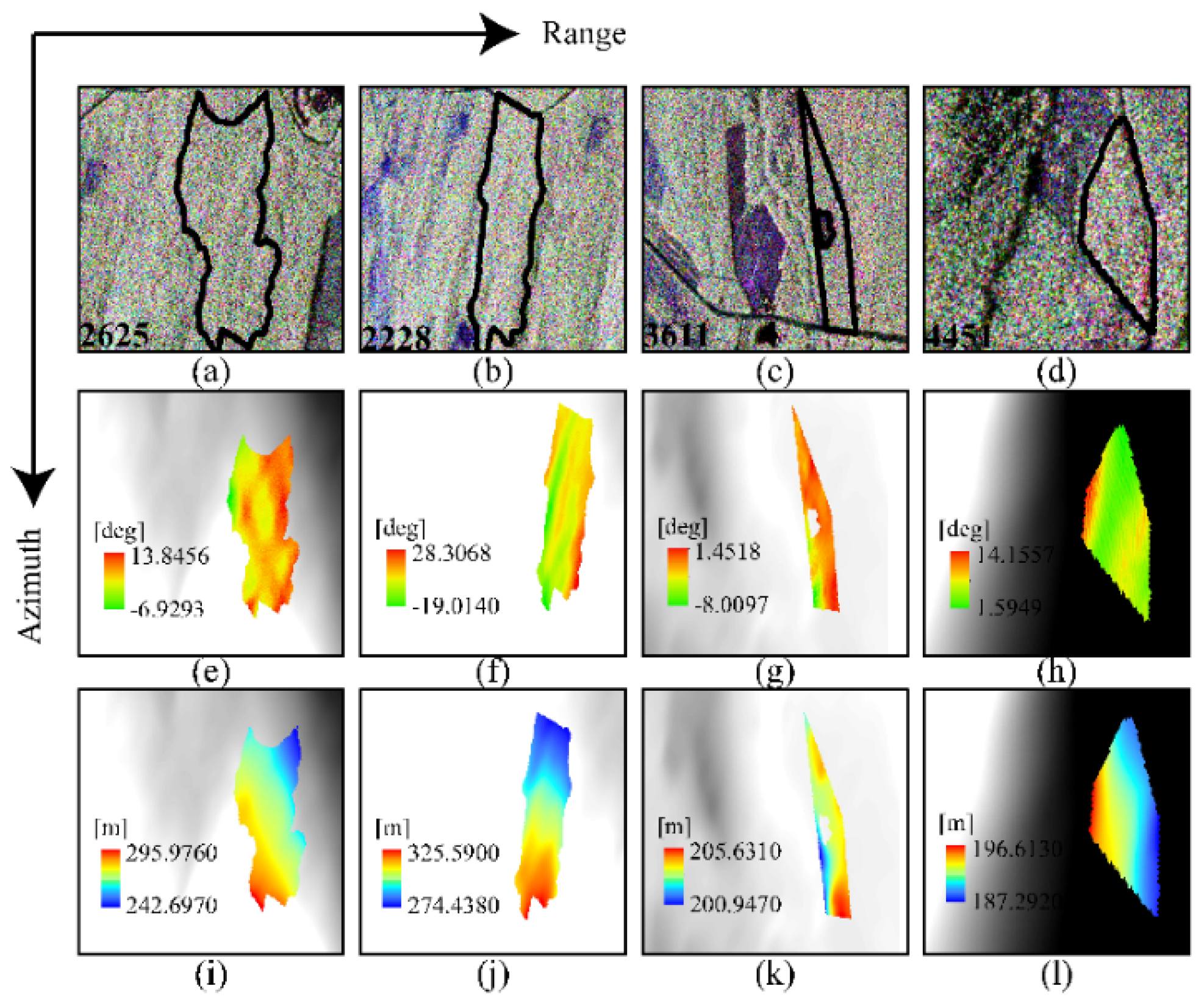
4.2. Results of Forest Height Inversion for a Real Dataset
5. Discussion
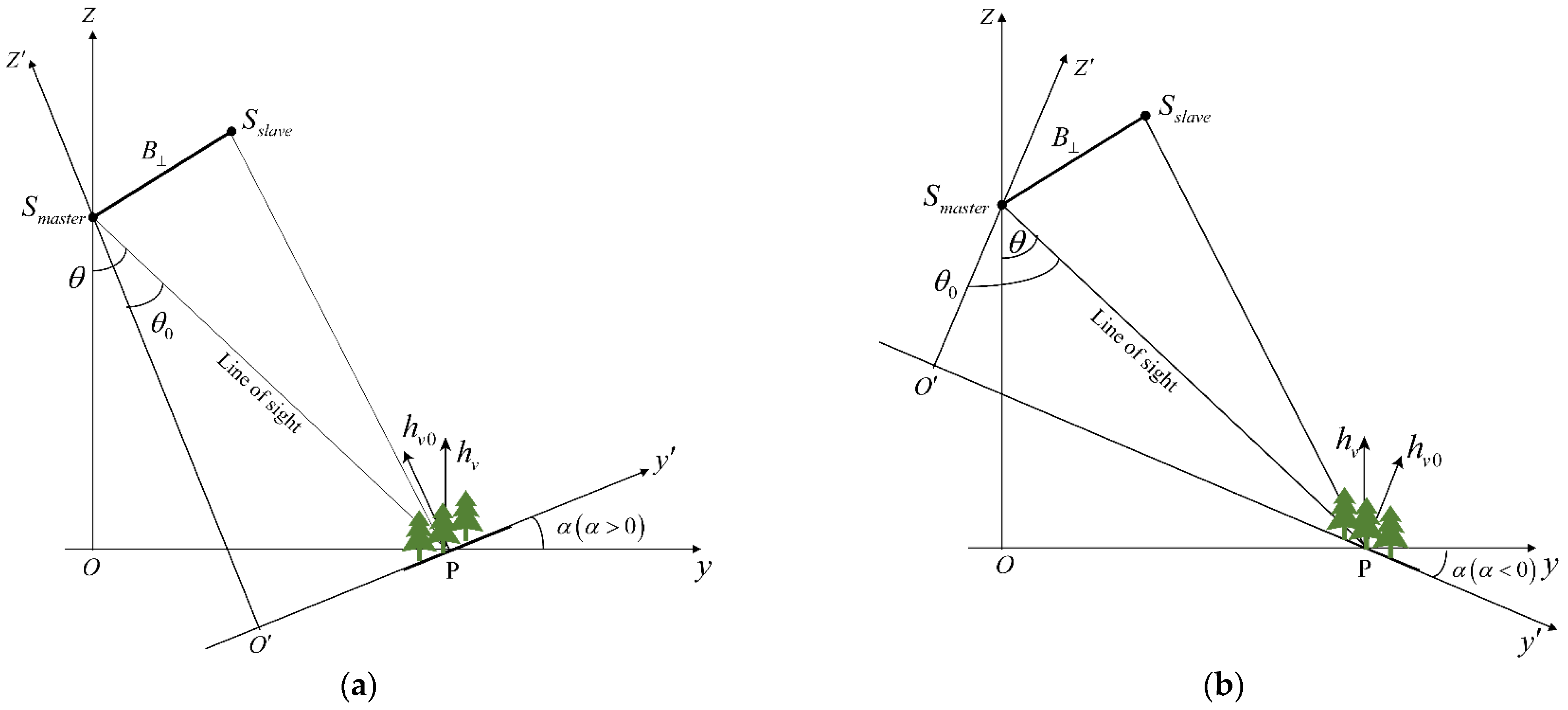
5.1. Effect of Forest Density on Phase
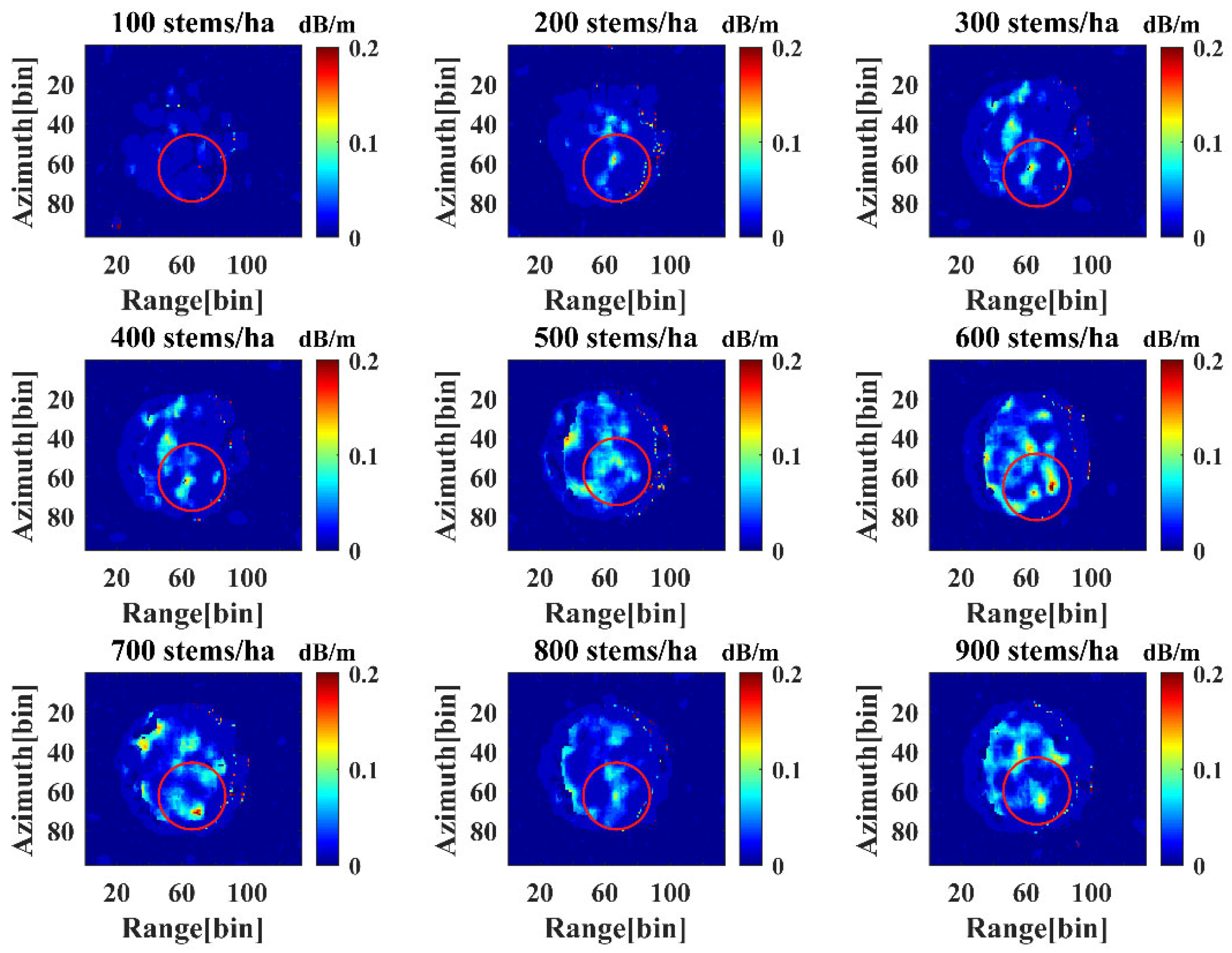
5.2. Effect of Forest Density on the Magnitude
5.3. Discussion of Coherence Magnitude and Three-Stage Hybrid Iterative Model
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ghasemi, N.; Sahebi, M.R.; Mohammadzadeh, A. A Review on Biomass Estimation Methods Using Synthetic Aperture Radar Data. Int. J. Geomat. Geosci. 2011, 1, 776–788. [Google Scholar]
- Mora, B.; Wulder, M.A.; White, J.C.; Hobart, G. Modeling Stand Height, Volume, and Biomass from Very High Spatial Resolution Satellite Imagery and Samples of Airborne LIDAR. Remote Sens. 2013, 5, 2308–2326. [Google Scholar] [CrossRef] [Green Version]
- Cao, C.; Bao, Y.; Xu, M.; Chen, W.; Zhang, H.; He, Q.; Li, Z.; Guo, H.; Li, J.; Li, X.; et al. Retrieval of Forest Canopy Attributes Based on a Geometric-Optical Model Using Airborne LiDAR and Optical Remote-Sensing Data. Int. J. Remote Sens. 2012, 33, 692–709. [Google Scholar] [CrossRef]
- Wenxue, F.; Huadong, G.; Xinwu, L.; Bangsen, T.; Zhongchang, S. Extended Three-Stage Polarimetric SAR Interferometry Algorithm by Dual-Polarization Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2792–2802. [Google Scholar] [CrossRef]
- Askne, J.I.H.; Ulander, L.M.H.; Soja, M.J. Biomass Estimation in a Boreal Forest from TanDEM-X Data, Lidar DTM, and the Interferometric Water Cloud Model. Remote Sens. Environ. 2017, 196, 265–278. [Google Scholar] [CrossRef]
- Treuhaft, R.N.; Madsen, S.N.; Moghaddam, M.; Zyl, J.J. Van Vegetation Characteristics and Underlying Topography from Interferolnetric Radar. Radio Sci. 1996, 31, 1449–1485. [Google Scholar] [CrossRef]
- Denbina, M.; Simard, M.; Hawkins, B. Forest Height Estimation Using Multibaseline PolInSAR and Sparse Lidar Data Fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3415–3433. [Google Scholar] [CrossRef]
- Cloude, S.R. Polarimetric Sar Interferometry. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1551–1565. [Google Scholar] [CrossRef]
- Askne, J.I.H.; Dammert, P.B.G.; Ulander, L.M.H.; Smith, G. C-Band Repeat-Pass Interferometric SAR Observations of the Forest. IEEE Trans. Geosci. Remote Sens. 1997, 35, 25–35. [Google Scholar] [CrossRef]
- Zhou, Z.B.; Ma, H.Z.; Zhu, X.B.; Sun, L. Comparative Analysis of Forest Height Retrieval Methods by Polarimetric SAR Interferometry. Adv. Mater. Res. 2013, 726–731, 4686–4689. [Google Scholar] [CrossRef]
- Cloude, S. Polarisation: Applications in Remote Sensing; OUP: Oxford, UK, 2009. [Google Scholar]
- Cloude, S.R. Polarization Coherence Tomography. Radio Sci. 2006, 41, 1–27. [Google Scholar] [CrossRef]
- Cloude, S.R.; Papathanassiou, K.P. Three-Stage Inversion Process for Polarimetric SAR Interferometry. IEE Proc.-Radar Sonar Navig. 2003, 150, 125–134. [Google Scholar] [CrossRef] [Green Version]
- Cloude, S.R.; Papathanassiou, K.P. Polarimetric Radar Interferometry. Opt. Sci. Eng. Instrum. 1997, 3120, 224–235. [Google Scholar]
- Tabb, M.; Orrey, J.; Flynn, T.; Carande, R. Phase Diversity: A Decomposition for Vegetation Parameter Estimation Using Polarimetric SAR Interferometry. In Proceedings of the European Conference on Synthetic Aperture Radar Conference, Cologne, Germany, 4–6 June 2002; pp. 721–724. [Google Scholar]
- Zhang, Q.; Mercer, J.B.; Cloude, S.R. Forest Height Estimation from Indrex-II L-Band Polarimetric InSAR Data. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 3–11 July 2008. [Google Scholar]
- Zebker, H.A.; Villasenor, J. Decorrelation in Interferometric Radar Echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Ulander, L.M.H. Radiometric Slope Correction of Synthetic-Aperture Radar Images. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1115–1122. [Google Scholar] [CrossRef]
- Sun, X.; Wang, B.; Xiang, M.; Fu, X.; Zhou, L.; Li, Y. S-RVoG Model Inversion Based on Time-Frequency Optimization for P-Band Polarimetric SAR Interferometry. Remote Sens. 2019, 11, 1033. [Google Scholar] [CrossRef] [Green Version]
- Lu, H.; Suo, Z.; Guo, R.; Bao, Z. S-RVoG Model for Forest Parameters Inversion over Underlying Topography. Electron. Lett. 2013, 49, 618–620. [Google Scholar] [CrossRef]
- Xie, Q.; Zhu, J.; Wang, C.; Fu, H.; Lopez-Sanchez, J.M.; Ballester-Berman, J.D. A Modified Dual-Baseline PolInSAR Method for Forest Height Estimation. Remote Sens. 2017, 9, 819. [Google Scholar] [CrossRef] [Green Version]
- Papathanassiou, K.P.; Cloude, S.R. The Effect of Temporal Decorrelation on the Inversion of Forest Parameters from Polinsar Data. Int. Geosci. Remote Sens. Symp. 2003, 3, 1429–1431. [Google Scholar] [CrossRef]
- Lee, S.K.; Kugler, F.; Papathanassiou, K.P.; Hajnsek, I. Quantifying Temporal Decorrelation over Boreal Forest at L- And P-Band. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]
- Lavalle, M.; Simard, M.; Pottier, E.; Solimini, D. PolInSAR Forestry Applications Improved by Modeling Height-Dependent Temporal Decorrelation. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 4772–4775. [Google Scholar]
- Lei, Y.; Siqueira, P. Estimation of Forest Height Using Spaceborne Repeat-Pass L-Band InSAR Correlation Magnitude over the US State of Maine. Remote Sens. 2014, 6, 10252–10285. [Google Scholar] [CrossRef] [Green Version]
- Lavalle, M.; Simard, M.; Solimini, D.; Pottier, E. Height-Dependent Temporal Decorrelation for POLINSAR and TOMOSAR Forestry Applications. In Proceedings of the 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 1–4. [Google Scholar]
- Qinghua, X.I.E.; Changcheng, W.; Jianjun, Z.H.U.; Haiqiang, F.U. Forest Height Inversion by Combining S-RVOG Model with Terrain Factor and PD Coherence Optimization. Acta Geod. Cartogr. Sin. 2015, 44, 686. [Google Scholar]
- Garestier, F.; Dubois-Fernandez, P.C.; Papathanassiou, K.P. Pine Forest Height Inversion Using Single-Pass X-Band PolInSAR Data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 59–68. [Google Scholar] [CrossRef]
- Wang, C.; Wang, L.; Fu, H.; Xie, Q.; Zhu, J. The Impact of Forest Density on Forest Height Inversion Modeling from Polarimetric InSAR Data. Remote Sens. 2016, 8, 291. [Google Scholar] [CrossRef]
- Pottier, E.; Ferro-Famil, L.; Allain, S.; Cloude, S.R.; Hajnsek, I.; Papathanassiou, K.; Moreira, A.; Williams, M.; Minchella, A.; Lavalle, M. Overview of the PolSARpro v4. 0 Software New Updates of the Educational Toolbox for Polarimetric and Interferometric Polarimetric SAR Data Processing. In Proceedings of the POLinSAR 2009, Frascati, Italy, 26 January 2009; p. CD-ROM. [Google Scholar]
- Papathanassiou, K.P.; Cloude, S.R. Single-Baseline Polarimetric SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2352–2363. [Google Scholar] [CrossRef] [Green Version]
- Hajnsek, I.; Scheiber, R.; Keller, M.; Horn, R.; Lee, S.; Ulander, L.; Gustavsson, A.; Sandberg, G.; Le Toan, T.; Tebaldini, S. BIOSAR 2008: Final Report; ESA-ESTEC: Noordwijk, Netherlands, 2009; Volume 22052. [Google Scholar]
- Neumann, M.; Neumann, M.; De, T.; Neumann, M. Remote Sensing of Vegetation Using Multi-Baseline Polarimetric SAR Interferometry: Theoretical Modeling and Physical Parameter Retrieval. Ph.D. Thesis, Université Rennes, Rennes, France, 2009. [Google Scholar]
- Soja, M.J.; Sandberg, G.; Ulander, L.M.H. Regression-Based Retrieval of Boreal Forest Biomass in Sloping Terrain Using P-Band SAR Backscatter Intensity Data. IEEE Trans. Geosci. Remote Sens. 2012, 51, 2646–2665. [Google Scholar] [CrossRef] [Green Version]
- Yamada, H.; Yamaguchi, Y.; Rodriguez, E.; Kim, Y.; Boerner, W.M. Polarimetric SAR Interferometry for Forest Canopy Analysis by Using the Super-Resolution Method. In Proceedings of the 2001 International Geoscience and Remote Sensing Symposium (Cat. No. 01CH37217), Sydney, NSW, Australia, 9–13 July 2001; Volume 3, pp. 1101–1103. [Google Scholar]
- Mette, T.; Kugler, F.; Papathanassiou, K.; Hajnsek, I. Forest and the Random Volume over Ground-Nature and Effect of 3 Possible Error Types. In Proceedings of the European Conference on Synthetic Aperture Radar (EUSAR), Dresden, Germany, 16–18 May 2006; pp. 1–4. [Google Scholar]
- Mao, Y.; Michel, O.O.; Yu, Y.; Fan, W.; Sui, A.; Liu, Z.; Wu, G. Retrieval of Boreal Forest Heights Using an Improved Random Volume over Ground (RVoG) Model Based on Repeat-Pass Spaceborne Polarimetric SAR Interferometry: The Case Study of Saihanba, China. Remote Sens. 2021, 13, 4306. [Google Scholar] [CrossRef]
- Liao, Z.; He, B.; Quan, X.; van Dijk, A.I.J.M.; Qiu, S.; Yin, C. Biomass Estimation in Dense Tropical Forest Using Multiple Information from Single-Baseline P-Band PolInSAR Data. Remote Sens. Environ. 2019, 221, 489–507. [Google Scholar] [CrossRef]
- Managhebi, T.; Maghsoudi, Y.; Zoej, M.J.V. An Improved Three-Stage Inversion Algorithm in Forest Height Estimation Using Single-Baseline Polarimetric Sar Interferometry Data. IEEE Geosci. Remote Sens. Lett. 2018, 15, 887–891. [Google Scholar] [CrossRef]
- Liu, F.; Yang, Z.; Zhang, G. Canopy Gap Characteristics and Spatial Patterns in a Subtropical Forest of South China after Ice Storm Damage. J. Mt. Sci. 2020, 17, 1942–1958. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Y.; Fan, W.; He, L.; Yu, Y.; Mao, X. A Modified Two-Steps Three-Stage Inversion Algorithm for Forest Height Inversion Using Single-Baseline L-Band PolInSAR Data. Remote Sens. 2022, 14, 1986. [Google Scholar] [CrossRef]
- Cloude, S.R.; Williams, M.L. A Coherent EM Scattering Model for Dual Baseline POLInSAR. In Proceedings of the IGARSS 2003. 2003 IEEE International Geoscience and Remote Sensing Symposium. Proceedings (IEEE Cat. No. 03CH37477), Toulouse, France, 21–25 July 2003; Volume 3, pp. 1423–1425. [Google Scholar]
- Tebaldini, S.; Rocca, F. Multibaseline Polarimetric SAR Tomography of a Boreal Forest at P-and L-Bands. IEEE Trans. Geosci. Remote Sens. 2011, 50, 232–246. [Google Scholar] [CrossRef]
- Rocca, F. Modeling Interferogram Stacks. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3289–3299. [Google Scholar] [CrossRef]
- Simard, M.; Hensley, S.; Lavalle, M.; Dubayah, R.; Pinto, N.; Hofton, M. An Empirical Assessment of Temporal Decorrelation Using the Uninhabited Aerial Vehicle Synthetic Aperture Radar over Forested Landscapes. Remote Sens. 2012, 4, 975–986. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Platform Configuration | Parameter | Forest/Ground Surface Configuration | Parameter |
|---|---|---|---|
| Platform Altitude | 3000 m | Tree Species | Pine |
| Horizontal/Vertical Baseline | 10 m,1 m | Surface Properties/Ground Moisture Content | 0,0 |
| Incidence Angle | 45° | Azimuth/Range Ground Slope | 0 |
| Centre Frequency | 1.3 GHZ | Tree Height | 18 m |
| Scene ID | Baseline (m) | Kz | Band | Polarization |
|---|---|---|---|---|
| 08BioSAR0201 | Master 0 m | Master | L | Quad |
| 08BioSAR0205 | Slave 12 m | 0.046–0.370 | L | Quad |
| Forest Density (stems/ha) | 100 | 200 | 300 | 400 | 500 | 600 | 700 | 800 | 900 |
|---|---|---|---|---|---|---|---|---|---|
| DEM Difference Method | |||||||||
| MEAN | 6.82 | 8.18 | 8.10 | 8.36 | 9.38 | 9.64 | 9.10 | 9.167 | 8.84 |
| RMSE | 11.41 | 10.15 | 10.19 | 9.93 | 8.99 | 8.78 | 9.27 | 9.19 | 9.56 |
| SINC Inversion Method | |||||||||
| MEAN | 20.04 | 18.94 | 18.09 | 17.16 | 16.56 | 16.72 | 17.25 | 17.31 | 16.52 |
| RMSE | 5.19 | 4.94 | 4.20 | 4.40 | 4.43 | 4.59 | 4.63 | 4.46 | 4.72 |
| RVoG Ground Phase Method | |||||||||
| MEAN | 8.46 | 9.70 | 9.97 | 9.73 | 10.66 | 11.01 | 10.37 | 10.32 | 10.47 |
| RMSE | 9.87 | 8.59 | 8.28 | 8.48 | 7.67 | 7.31 | 7.92 | 7.94 | 7.84 |
| Three-Stage Inversion Method | |||||||||
| MEAN | 13.73 | 15.65 | 15.66 | 15.69 | 15.93 | 16.16 | 15.63 | 16.15 | 15.92 |
| RMSE | 6.30 | 4.90 | 4.19 | 4.28 | 4.17 | 3.900 | 4.30 | 4.07 | 4.21 |
| Phase and Coherence Inversion Method | |||||||||
| MEAN | 15.66 | 16.86 | 16.87 | 16.24 | 16.87 | 17.22 | 16.79 | 16.80 | 15.66 |
| RMSE | 4.85 | 4.13 | 3.32 | 3.76 | 3.57 | 3.51 | 3.53 | 3.71 | 4.85 |
| Coherence amplitude and three-stage hybrid iteration method | |||||||||
| MEAN | 17.35 | 16.79 | 17.23 | 16.92 | 16.85 | 17.36 | 16.99 | 16.96 | 16.88 |
| RMSE | 3.01 | 3.52 | 2.81 | 3.50 | 3.27 | 3.01 | 3.19 | 3.34 | 3.27 |
| Forest Stand Number | Forest Density (stems/ha) | Mean Height (m) | Mean Height from Lidar (m) |
|---|---|---|---|
| 4451 | 628.66 | 18.72 | 20.99 |
| 2625 | 840.34 | 18.06 | 22.45 |
| 3611 | 1149.10 | 17.36 | 21.44 |
| 2228 | 1330.54 | 17.69 | 20.50 |
| Forest Stand Number | Forest Density (stems/ha) | Hybrid Iterative Algorithm Height (m) | RMSE (m) | MAPE (%) | STD (m) | VAR |
|---|---|---|---|---|---|---|
| 4451 | 628.66 | 21.21 | 1.14 | 3.99 | 1.11 | 1.22 |
| 2625 | 840.34 | 22.19 | 1.60 | 6.20 | 1.05 | 1.11 |
| 3611 | 1149.10 | 21.54 | 1.83 | 5.86 | 1.83 | 3.34 |
| 2228 | 1330.54 | 20.89 | 2.17 | 7.70 | 1.51 | 2.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sui, A.; Michel, O.O.; Mao, Y.; Fan, W. An Improved Forest Height Model Using L-Band Single-Baseline Polarimetric InSAR Data for Various Forest Densities. Remote Sens. 2023, 15, 81. https://doi.org/10.3390/rs15010081
Sui A, Michel OO, Mao Y, Fan W. An Improved Forest Height Model Using L-Band Single-Baseline Polarimetric InSAR Data for Various Forest Densities. Remote Sensing. 2023; 15(1):81. https://doi.org/10.3390/rs15010081
Chicago/Turabian StyleSui, Ao, Opelele Omeno Michel, Yu Mao, and Wenyi Fan. 2023. "An Improved Forest Height Model Using L-Band Single-Baseline Polarimetric InSAR Data for Various Forest Densities" Remote Sensing 15, no. 1: 81. https://doi.org/10.3390/rs15010081