
An Innovative Synthetic Aperture Radar Design Method for Lunar Water Ice Exploration



Abstract
:1. Introduction
2. Preliminaries
2.1. Pitfalls
2.2. Campbell Model
2.3. Radiometric Resolution
3. System Design Method
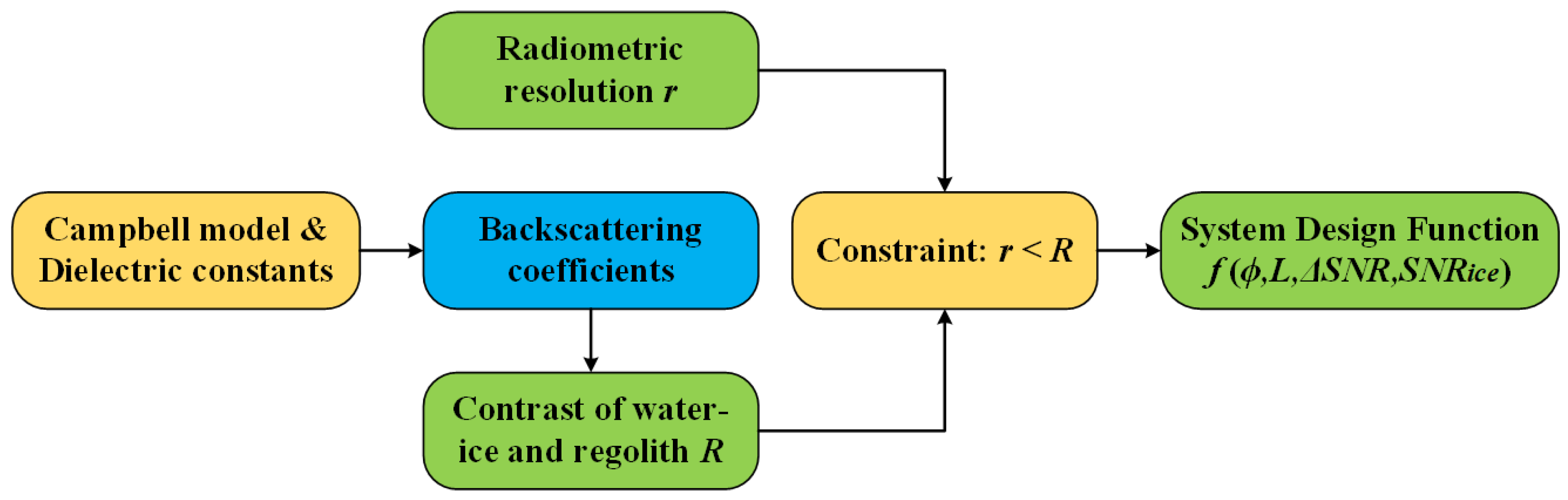
3.1. System Function for Pure Water Ice
3.2. System Function for Mixtures
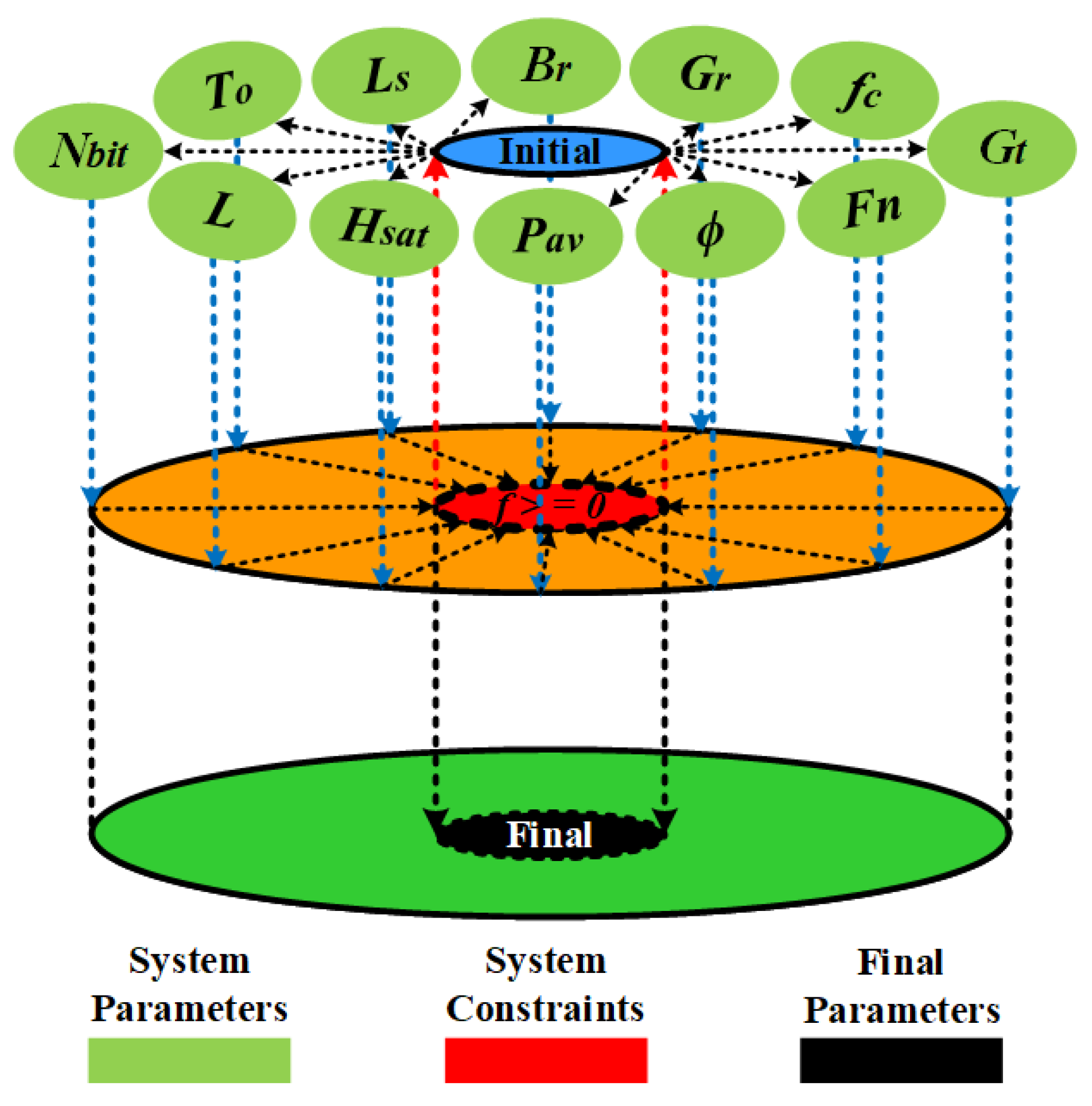
3.3. System Design Method
- the initial input values described by the blue ellipse are assigned to the SAR system parameters represented by the light green ellipses;
- if the constraint is satisfied, the final system parameters of spaceborne SAR are obtained, which are denoted by the black ellipse, and the SAR system design process is terminated;
- otherwise, the initial parameters are modified and optimized, which are described as the red dashed lines with direction;
4. Experimental Results
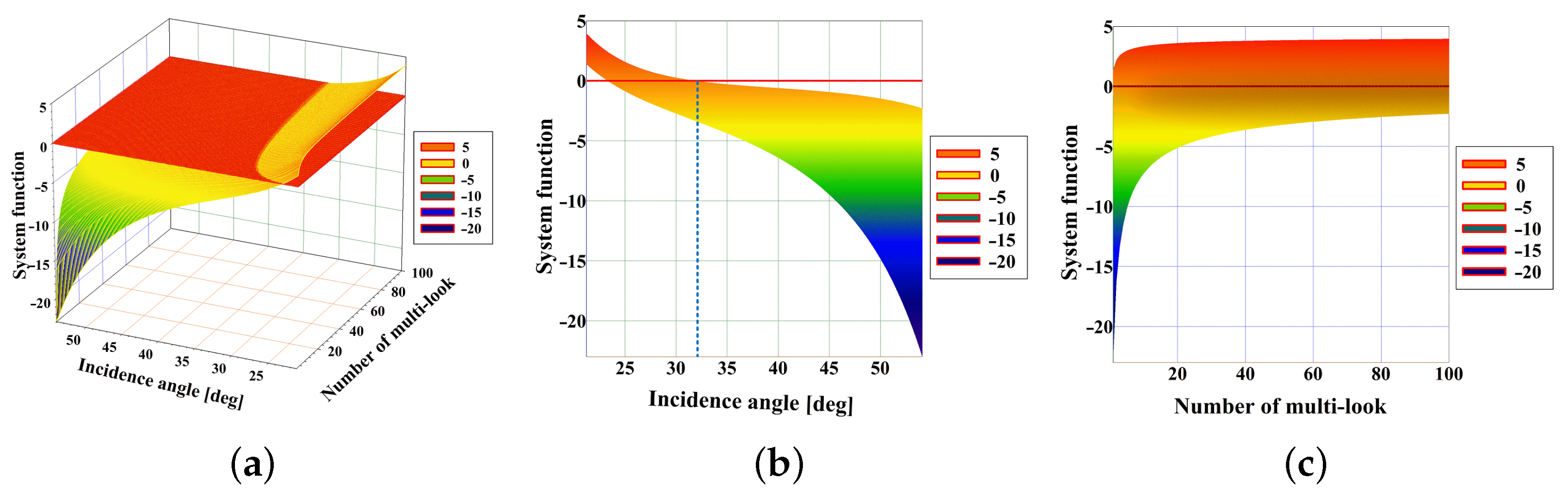
4.1. Experiments for Pure Water Ice
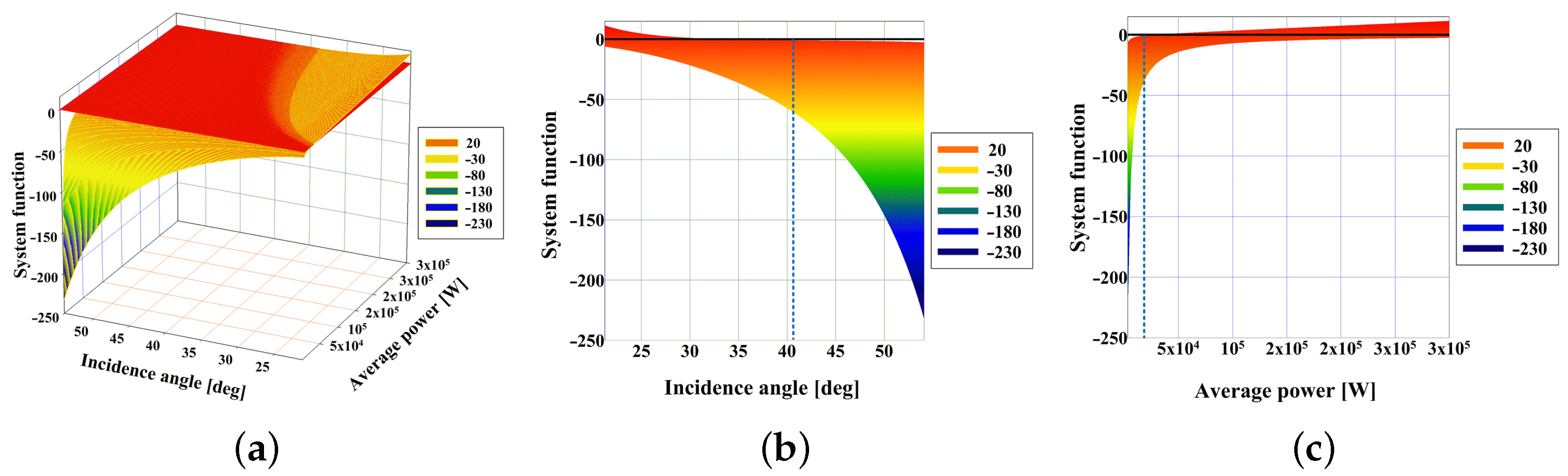
4.2. Experiments for Mixtures
5. Discussion
5.1. Exploration of Water Ice by Non-Radar Techniques
5.2. Advantage of Using SAR to Exploration Water Ice
5.3. Effect of Roughness on Detection
5.4. Effect of Other Volatiles on Detection
5.5. Effect of Variable Dielectric Constant of Lunar Regolith on Detection
5.6. Limitation of the Campbell Model
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lawrence, D. A tale of two poles: Toward understanding the presence, distribution, and origin of volatiles at the polar regions of the Moon and Mercury. J. Geophys. Res. Planets 2017, 122, 21–52. [Google Scholar] [CrossRef]
- Watson, K.; Murray, B.; Brown, H. On the possible presence of ice on the Moon. J. Geophys. Res. 1961, 66, 1598–1600. [Google Scholar] [CrossRef] [Green Version]
- Feldman, W.; Maurice, S.; Binder, A.; Barraclough, B.; Elphic, R.; Lawrence, D. Fluxes of fast and epithermal neutrons from Lunar Prospector: Evidence for water ice at the lunar poles. Science 1998, 281, 1496–1500. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feldman, W.; Maurice, S.; Lawrence, D.; Little, R.; Lawson, S.; Gasnault, O.; Wiens, R.; Barraclough, B.; Elphic, R.C.; Prettyman, T. Evidence for Water Ice Near the Lunar Poles. J. Geophys. Res. 2001, 106, 23231–23252. [Google Scholar] [CrossRef]
- Neish, C.; Bussey, D.; Spudis, P.; Marshall, W.; Thomson, B.; Patterson, G.; Carter, L. The nature of lunar volatiles as revealed by mini-RF observations of the LCROSS impact site. J. Geophys. Res. 2011, 116, E01005. [Google Scholar] [CrossRef]
- Malphrus, B.; Polina, Z.; Kevin, B.; David, F.; Cliff, B.; Terry, H.; Matthew, G.; Michael, T.; Pamela, C. The lunar IceCube EM-1 mission: Prospecting for lunar water ice. In Proceedings of the 42nd COSPAR Scientific Assembly, Pasadena, CA, USA, 14–22 July 2018. [Google Scholar]
- Mitrofanov, I.; Sanin, A.; Boynton, W.; Chin, G.; Garvin, J.; Golovin, D.; Evans, L.; Harshman, K.; Kozyrev, A.; Litvak, M.; et al. Hydrogen mapping of the lunar South Pole using the LRO neutron detector experiment LEND. Science 2010, 330, 483–486. [Google Scholar] [CrossRef]
- Nozette, S.; Rustan, P.; Pleasance, L.; Kordas, J.; Lewis, I.; Park, H.; Priest, R.; Horan, D.; Regeon, P.; Lichtenberg, C.; et al. The Clementine Mission to the Moon-Scientific overview. Science 1994, 266, 1835–1839. [Google Scholar] [CrossRef] [Green Version]
- Nozette, S.; Lichtenberg, C.; Spudis, P.; Bonner, R.; Ort, W.; Malaret, E.; Robinson, M.; Shoemaker, E. The Clementine bi-static radar experiment. Science 1996, 274, 1495–1498. [Google Scholar] [CrossRef] [Green Version]
- Stacy, N.; Campbell, D.; Ford, P. Arecibo radar mapping of the lunar poles: A search for ice deposits. Science 1997, 276, 1527–1530. [Google Scholar] [CrossRef] [Green Version]
- Stacy, N.; Campbell, D.; Ford, P. The possibility of ice on the Moon—Response. Science 1997, 278, 145. [Google Scholar]
- Campbell, D.; Campbell, B.; Carter, L.; Margot, J.; Stacy, N. No evidence for thick deposits of ice at the lunar south pole. Nature 2006, 443, 835–837. [Google Scholar] [CrossRef] [PubMed]
- Spudis, P.; Bussey, D.; Baloga, S.; Butler, B.; Carl, D.; Carter, L.; Chakraborty, M.; Elphic, R.; Gillis-Davis, J.; Goswami, J. Initial results for the north pole of the Moon from Mini-SAR, Chandrayaan-1 mission. Geophys. Res. Lett. 2010, 37, L06204. [Google Scholar] [CrossRef]
- Spudis, P.; Bussey, D.; Baloga, S.; Cahill, J.; Glaze, L.; Patterson, G.; Raney, R.; Thompson, T.; Thomson, B.; Ustinov, E. Evidence for water ice on the Moon: Results for anomalous polar craters from the LRO Mini-RF imaging radar. J. Geophys. Res. Planets 2013, 118, 2016–2029. [Google Scholar] [CrossRef]
- Fa, W.; Cai, Y. Circular polarization ratio characteristics of impact craters from Mini-RF observations and implications for ice detection at the polar regions of the Moon. J. Geophys. Res. Planets 2013, 118, 1582–1608. [Google Scholar] [CrossRef]
- Patterson, G.; Stickle, A.; Turner, F.; Jensen, J.; Bussey, D.; Spudis, P.; Espiritu, R.; Schulze, R.; Yocky, D.; Wahl, D.; et al. Bistatic radar observations of the Moon using Mini-RF on LRO and the Arecibo Observatory. Icarus 2016, 283, 2–19. [Google Scholar] [CrossRef]
- Putrevu, D.; Das, A.; Vachhani, J.G.; Trivedi, S.; Misra, T. Chandrayaan-2 dual-frequency SAR: Further investigation into lunar water and regolith. Adv. Space Res. 2016, 57, 627–646. [Google Scholar] [CrossRef]
- Shanmugam, M.; Patel, A.; Vadawale, S.V.; Acharya, Y.B.; Goyal, S.K. Characterization of high count rate capability of Solar X-ray Monitor on-board Chandrayaan-2—The second Indian mission to the Moon. In Proceedings of the 2013 IEEE Nuclear Science Symposium and Medical Imaging Conference (2013 NSS/MIC), Seoul, Korea, 27 October–2 November 2013; pp. 1–7. [Google Scholar]
- Yue, Z.; Johnson, B.; Minton, D.; Melosh, H.; Di, K.; Hu, W.; Liu, Y. Projectile remnants in central peaks of lunar impact craters. Nat. Geosci. 2013, 6, 435–437. [Google Scholar] [CrossRef]
- Fa, W.; Wieczorek, M.; Heggy, E. Modeling polarimetric radar scattering from the lunar surface: Study on the effect of physical properties of the regolith layer. J. Geophys. Res. Planets 2011, 116, 58–66. [Google Scholar] [CrossRef]
- Mishra, P.; Kumar, S.; Singh, D. An approach to determine possible existence of water ice deposits on lunar craters using minisar data. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 21–24. [Google Scholar]
- Mishra, P.; Kumar, S.; Singh, D. An Approach for Finding Possible Presence of Water Ice Deposits on Lunar Craters Using MiniSAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 30–38. [Google Scholar] [CrossRef]
- Thompson, T.; Ustinov, E.; Heggy, E. Modeling radar scattering from icy lunar regoliths. In Proceedings of the 2011 XXXth URSI General Assembly and Scientific Symposium, Istanbul, Turkey, 13–20 August 2011; pp. 1–2. [Google Scholar]
- Campbell, B.A. High circular polarization ratios in radar scattering from geologic targets. J. Geophys. Res. 2012, 117, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Ren, X.; Yan, W.; Li, C.; Zhang, H.; Jia, Y.; Zeng, X.; Chen, W.; Gao, X.; Liu, D.; et al. Descent trajectory reconstruction and landing site positioning of Chang’E-4 on the lunar farside. Nat. Commun. 2019, 10, 4229. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A Satellite Formation for High-Resolution SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2017, 45, 3317–3341. [Google Scholar] [CrossRef] [Green Version]
- Campbell, B.A.; Grant, J.A.; Maxwell, T. Radar penetration in Mars Analog Environments. In Proceedings of the 33rd Annual Lunar Planetary Science Conference, Houston, TX, USA, 11–15 March 2002. [Google Scholar]
- Calla, O.P.N.; Mathur, S.; Gadri, K.L. Quantification of Water Ice in the Hermite-A Crater of the Lunar North Pole. IEEE Geosci. Remote Sens. Lett. 2016, 13, 926–930. [Google Scholar] [CrossRef]
- Liu, N.; Ye, H.; Jin, Y. Dielectric Inversion of Lunar PSR Media with Topographic Mapping and Comment on “Quantification of Water Ice in the Hermite-A Crater of the Lunar North Pole”. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1444–1448. [Google Scholar] [CrossRef]
- Park, H.; Camps, A.; Choi, M.G.; Kim, Y. Radiometric Resolution of Motion-Induced Synthetic Aperture Radiometer. IEEE Geosci. Remote Sens. Lett. 2011, 8, 715–719. [Google Scholar] [CrossRef]
- Bonafoni, S.; Alimenti, F.; Roselli, L. An Efficient Gain Estimation in the Calibration of Noise-Adding Total Power Radiometers for Radiometric Resolution Improvement. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5289–5298. [Google Scholar] [CrossRef]
- Marquez-Martinez, J.; Mittermayer, J.; Rodriguez-Cassola, M. Radiometric resolution optimization for future SAR systems. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2007; pp. 1738–1741. [Google Scholar]
- Frost, V. Probability of Error And Radiometric Resolution for Target Discrimination in Radar Images. IEEE Trans. Geosci. Remote Sens. 1984, GE-22, 121–125. [Google Scholar] [CrossRef]
- Massonnet, D.; Souyris, J. Imaging with Synthetic Aperture Radar; Taylor and Francis: New York, NY, USA, 2008; ISBN 9780429147807. [Google Scholar]
- Liang, Y.; Li, Y. An Efficient and Robust Data Compression Algorithm in Wireless Sensor Networks. IEEE Commun. Lett. 2014, 18, 439–442. [Google Scholar] [CrossRef]
- Noh, Y.; Yom, I. A Linear GaN High Power Amplifier MMIC for Ka-Band Satellite Communications. IEEE Microw. Compon. Lett. 2016, 26, 619–621. [Google Scholar] [CrossRef]
- Colaprete, A.; Schultz, P.; Heldmann, J.; Wooden, D.; Shirley, M.; Ennico, K.; Hermalyn, B.; Marshall, W.; Ricco, A.; Elphic, R.C.; et al. Detection of water in the LCROSS Ejecta Plume. Science 2010, 330, 463–468. [Google Scholar] [CrossRef] [Green Version]
- Colaprete, A.; Elphic, R.; Heldmann, J.; Ennico, K. An overview of the Lunar Crater Observation and Sensing Satellite (LCROSS). Space Sci. Rev. 2012, 167, 3–22. [Google Scholar] [CrossRef]
- Li, S.; Milliken, R. Water on the surface of the Moon as seen by the Moon Mineralogy Mapper: Distribution, abundance, and origins. Sci. Adv. 2017, 3, e1701471. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bandfield, J.L.; Poston, M.J.; Klima, R.L.; Edwards, C.S. Widespread distribution of OH/H2O on the lunar surface inferred from spectral data. Nat. Geosci. 2018, 11, 173–177. [Google Scholar] [CrossRef] [PubMed]
- Wöhler, C.; Grumpe, A.; Berezhnoy, A.A.; Shevchenko, V.V. Time-of-day-dependent global distribution of lunar surficial water/hydroxyl. Sci. Adv. 2017, 3, e1701286. [Google Scholar] [CrossRef] [Green Version]
- Pieters, C.; Goswami, J.; Clark, R.; Annadurai, M.; Boardman, J.; Buratti, B.; Combe, J.; Dyar, M.; Green, R.; Head, J.; et al. Character and spatial distribution of OH/H2O on the surface of the Moon seen by M3 on Chandrayaan. Science 2010, 326, 568–572. [Google Scholar] [CrossRef]
- Berezhnoy, A.A.; Kozlova, E.A.; Sinitsyn, M.P.; Sinitsyn, A.; Shevchenko, V. Origin and stability of lunar polar volatiles. Adv. Space Res. 2012, 50, 1638–1646. [Google Scholar] [CrossRef]
- Physical Properties of Sulphur. Available online: http://sulphur.atomistry.com/physical_properties_sulphur.html (accessed on 31 March 2022).
- Havriliak, S.; Swenson, R.W.; Cole, R.H. Dielectric Constants of Liquid and Solid Hydrogen Sulfide. J. Chem. Phys. 1955, 23, 134–135. [Google Scholar] [CrossRef] [Green Version]
- Pettinelli, E.; Cosciotti, B.; Di Paolo, F.; Lauro, S.E.; Mattei, E.; Orosei, R.; Vannaroni, G. Dielectric properties of Jovian satellite ice analogs for subsurface radar exploration: A review. Rev. Geophys. 2015, 53, 593–641. [Google Scholar] [CrossRef] [Green Version]
- Carrier, W.D.; Olhoeft, G.R.; Mendell, W. Physical Properties of the Lunar Surface. In Lunar Source Book; Heiken, G.H., Vaniman, D.T., French, B.M., Eds.; Cambridge University Press: New York, NY, USA, 1991; pp. 475–594. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Dielectric Constants |
|---|---|
| Water ice | |
| Lunar regolith |
| Parameters | Values |
|---|---|
| Satellite height () | 15∼100 km |
| Satellite velocity () | 1671.8∼1633.5 m/s |
| Carrier frequency () | 1.25 GHz |
| Signal bandwidth () | 300 MHz |
| Field-of-View () | [, ] |
| NE | −25 dB |
| Noise factor () | 1.7 dB |
| System loss () | 1.5 dB |
| Average power () | 3000∼300,000 W |
| The Number of multi-looks () | 1∼150 |
| Network temperature () | 293 K |
| Dynamic range of receivers () | 60 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhao, F.; Chang, S.; Liu, M.; Wang, R. An Innovative Synthetic Aperture Radar Design Method for Lunar Water Ice Exploration. Remote Sens. 2022, 14, 2148. https://doi.org/10.3390/rs14092148
Zhang Y, Zhao F, Chang S, Liu M, Wang R. An Innovative Synthetic Aperture Radar Design Method for Lunar Water Ice Exploration. Remote Sensing. 2022; 14(9):2148. https://doi.org/10.3390/rs14092148
Chicago/Turabian StyleZhang, Yanyan, Fei Zhao, Sheng Chang, Mingliang Liu, and Robert Wang. 2022. "An Innovative Synthetic Aperture Radar Design Method for Lunar Water Ice Exploration" Remote Sensing 14, no. 9: 2148. https://doi.org/10.3390/rs14092148