
Monitoring Light Pollution with an Unmanned Aerial Vehicle: A Case Study Comparing RGB Images and Night Ground Brightness



Abstract
:1. Introduction
2. Materials and Methods
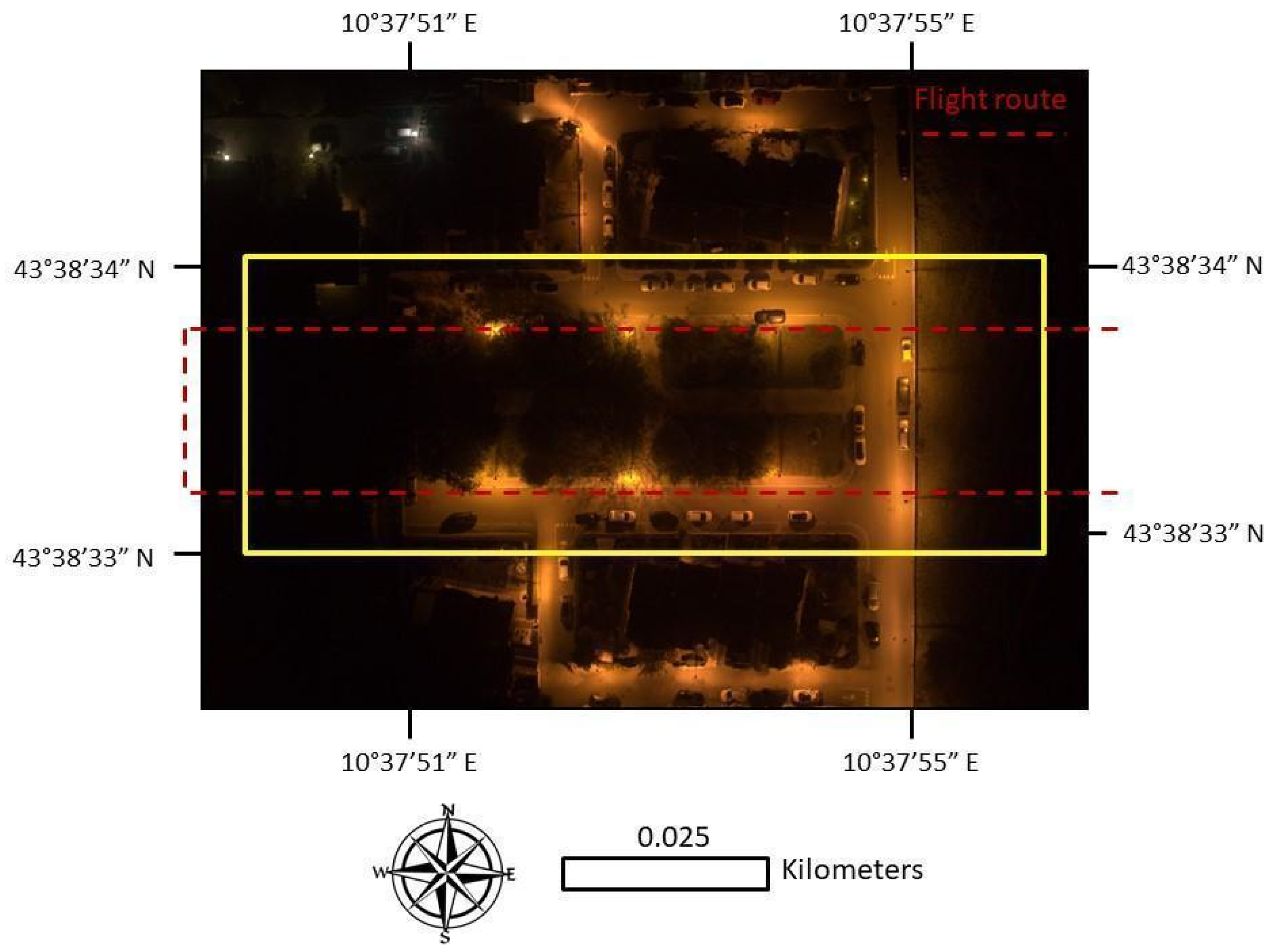
2.1. Study Area
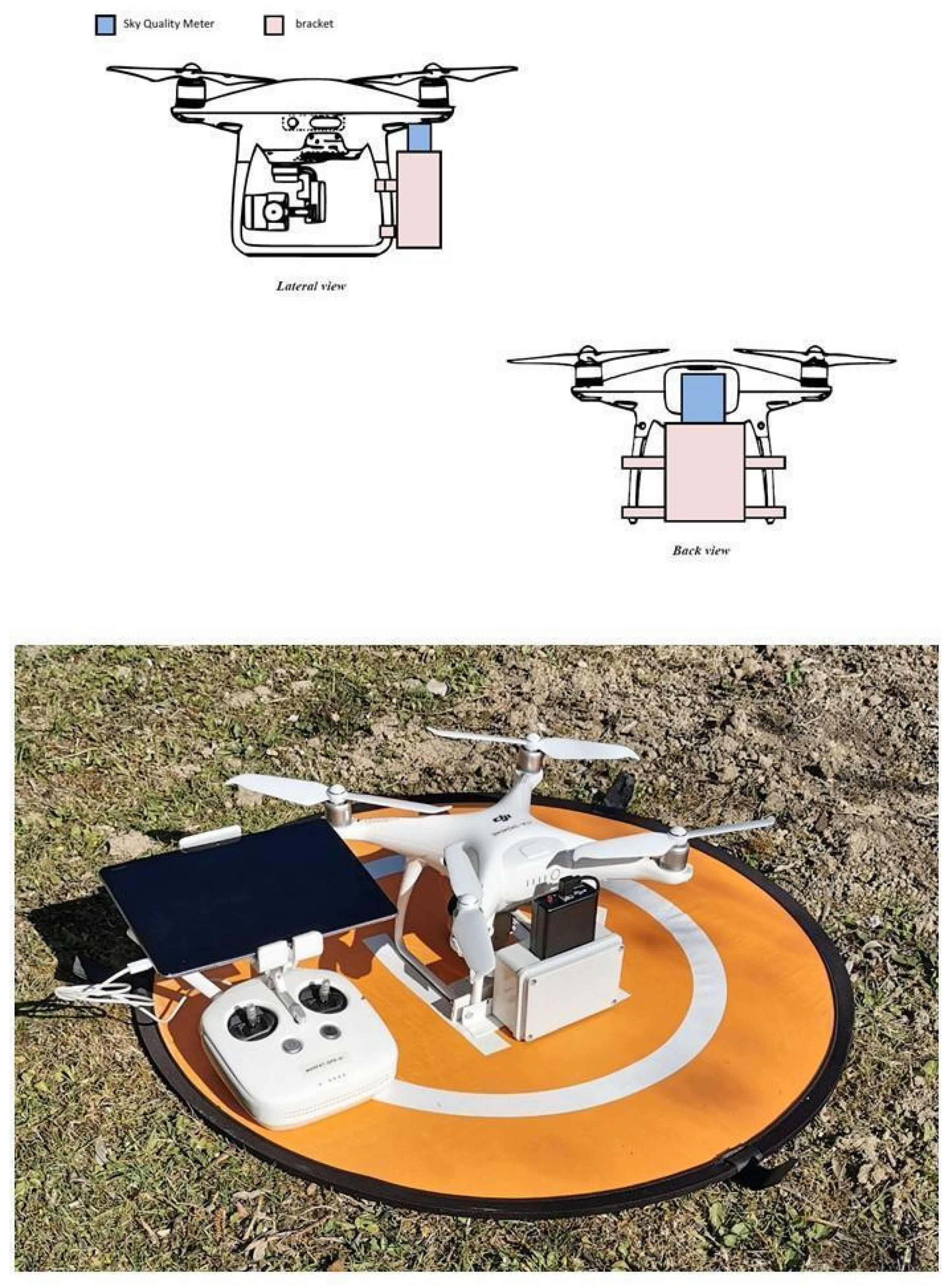
2.2. UAV Characteristics
2.3. Light Pollution Sensor Mounted on the UAV
2.4. Device Settings
2.5. Image Acquisition and Processing
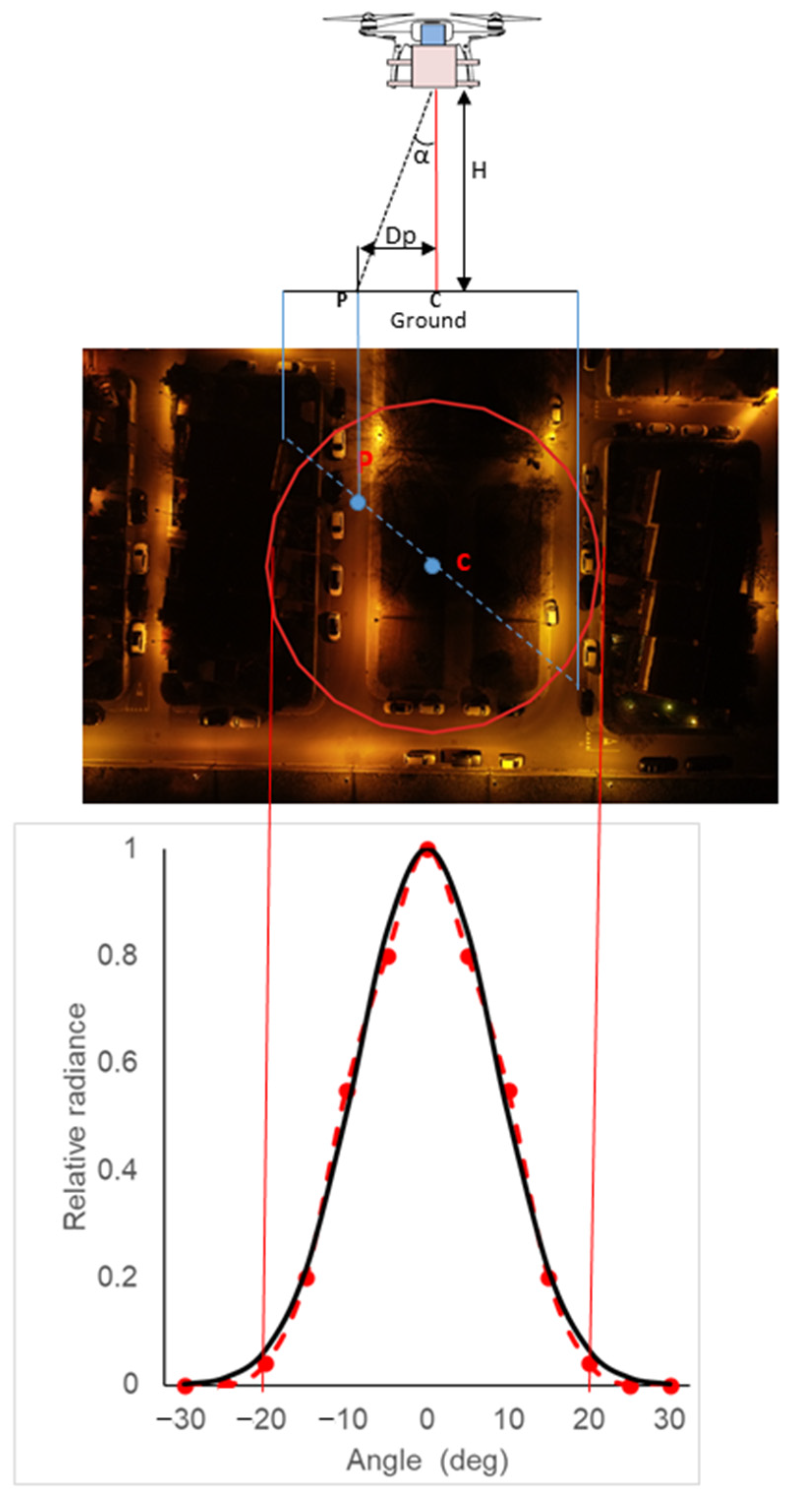
2.6. Relationship between UAV Image Indices and Night Sky Brightness
2.7. Statistical Analysis
2.8. Analysis of Orthophoto in Multispectral RGB
3. Results
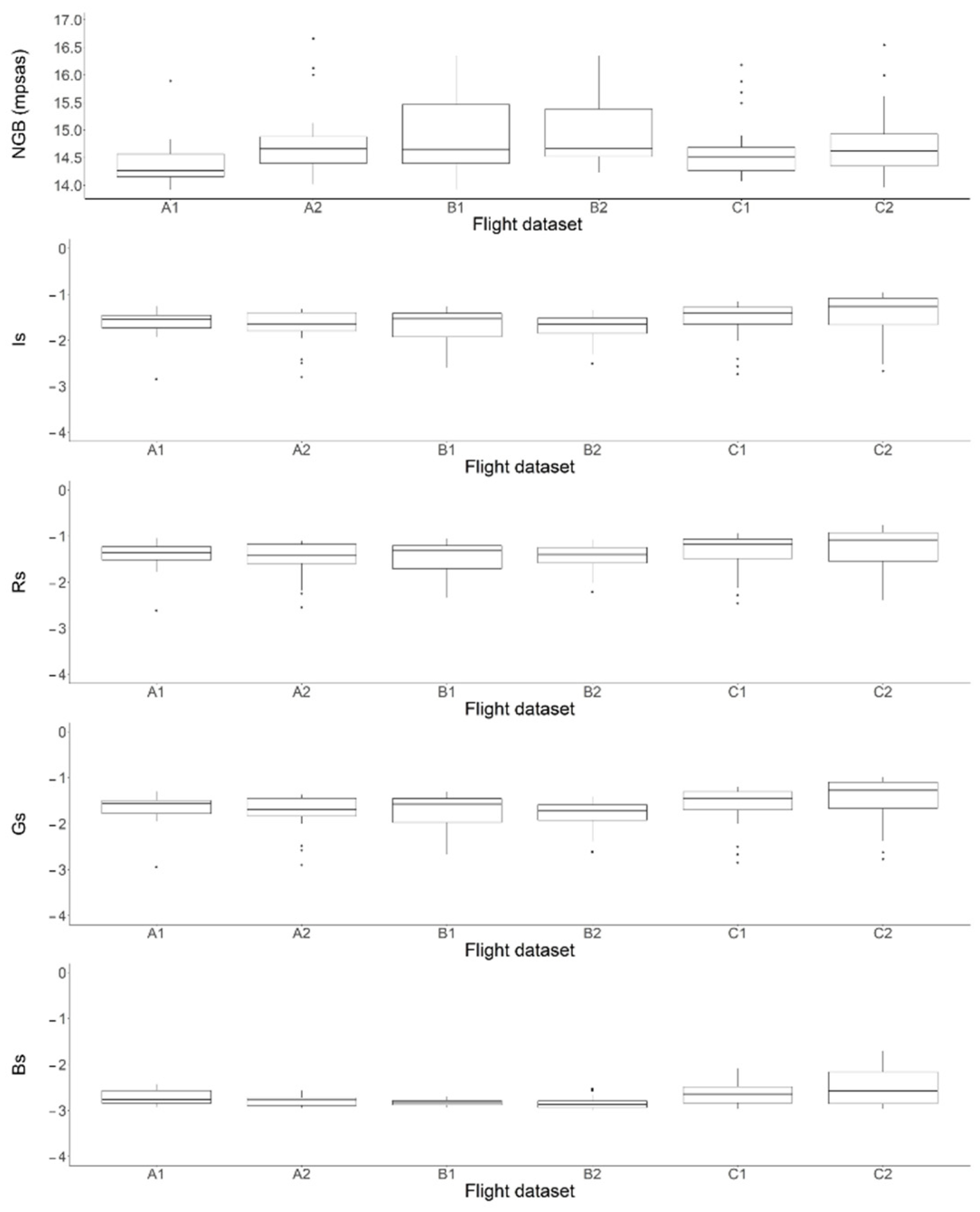
3.1. Night Ground Brightness (NGB) Measurements and Indices of Luminous Intensity
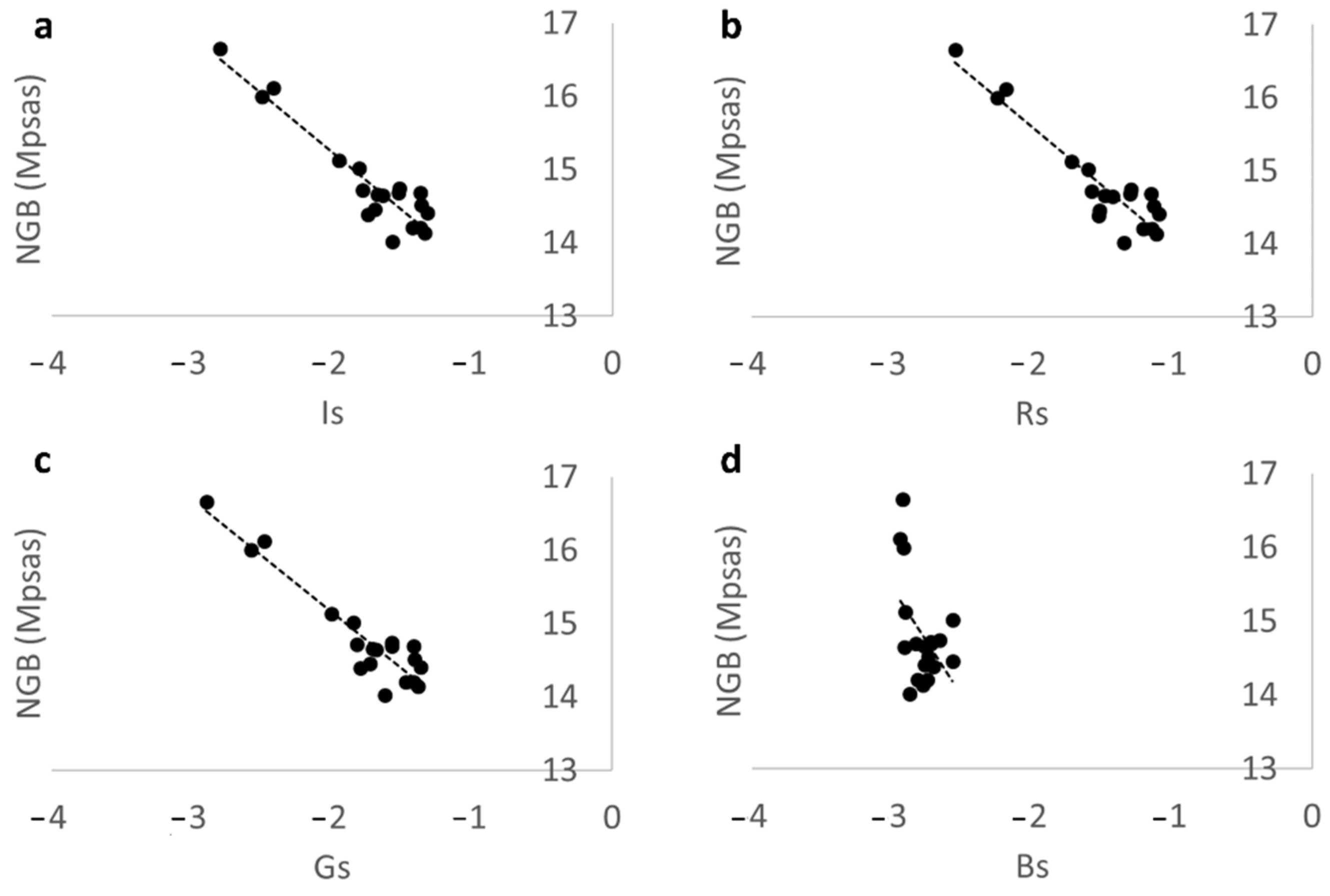
3.2. Relationship between Indices on UAV Images and SQM Measurements
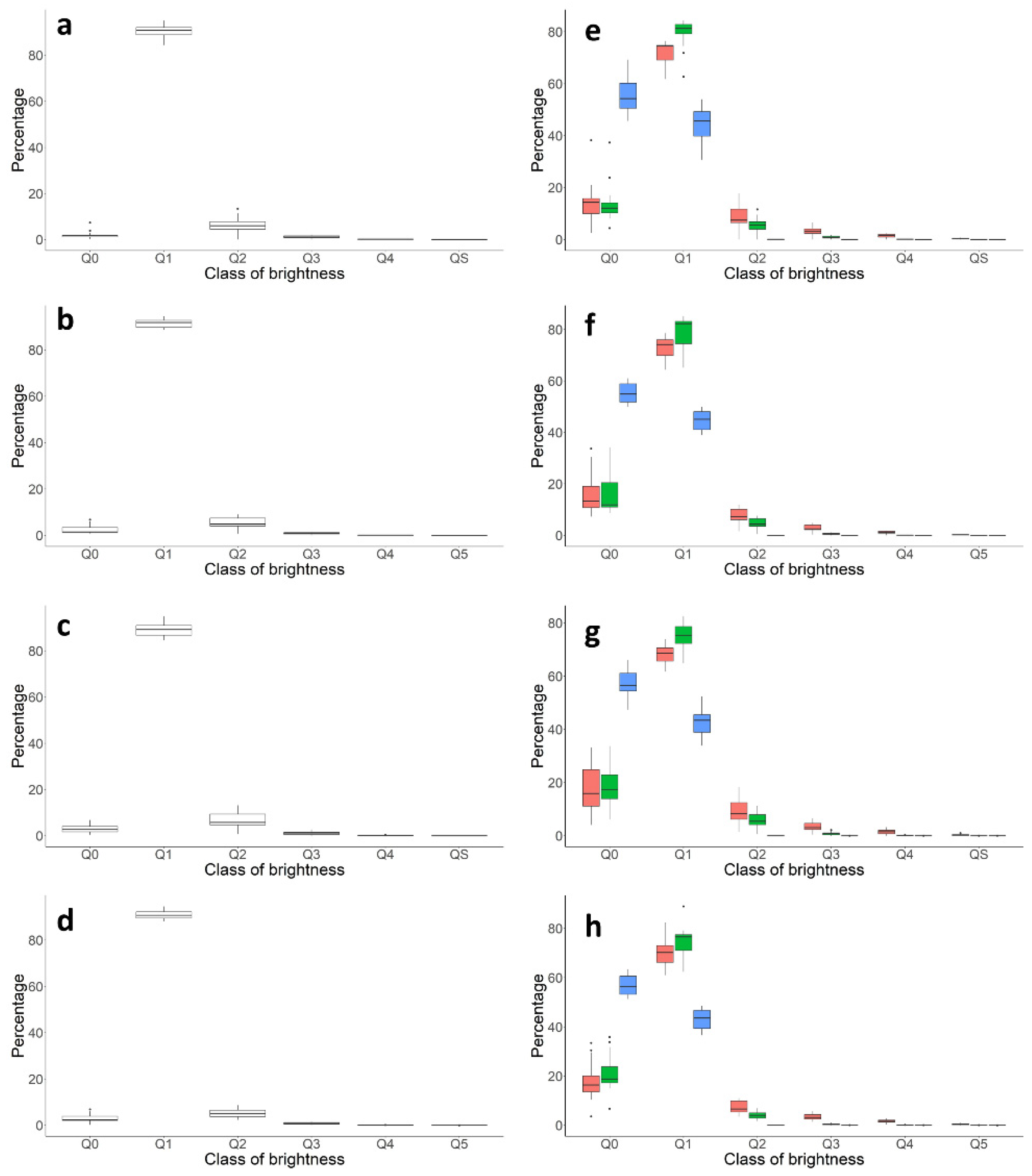
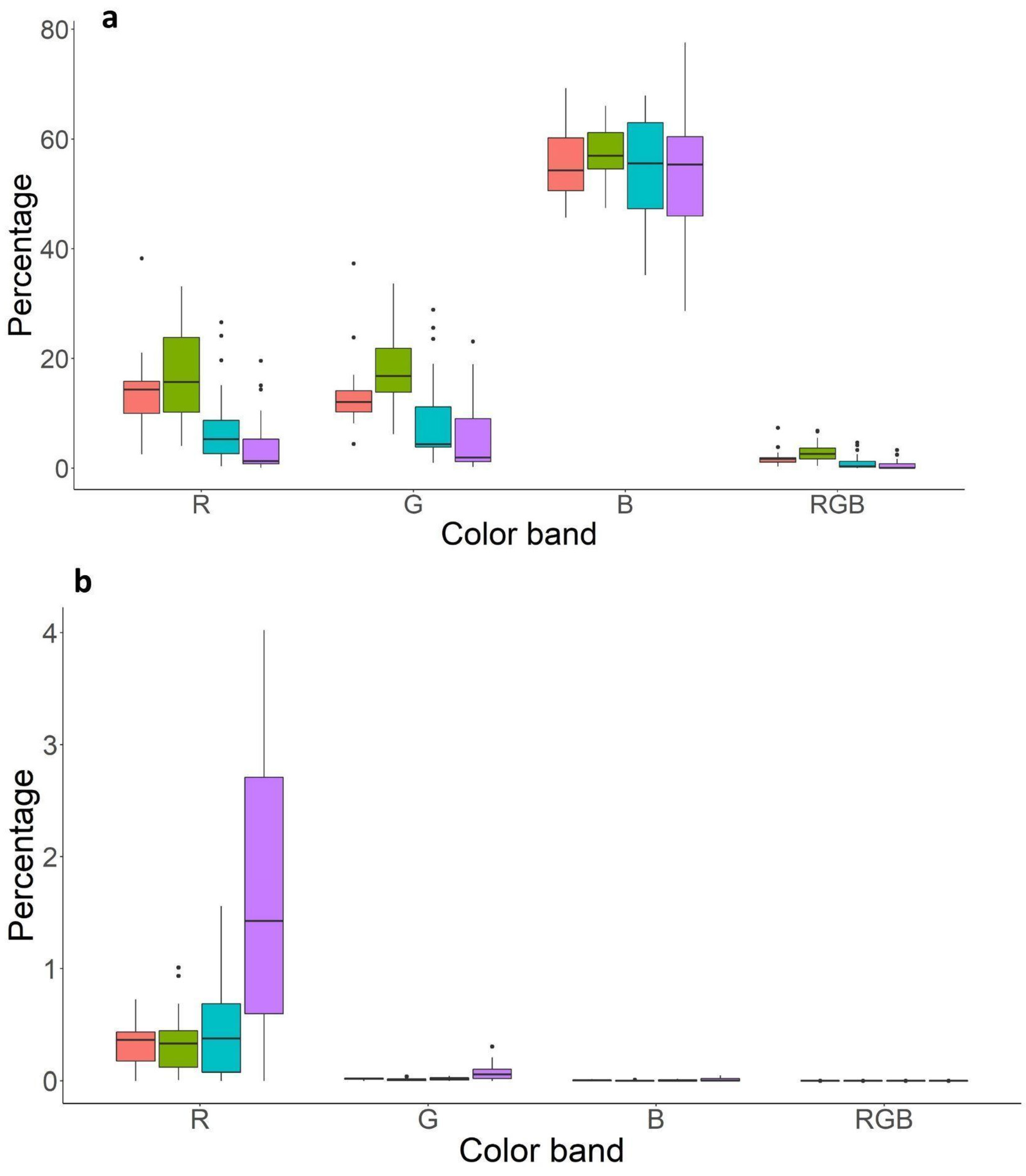
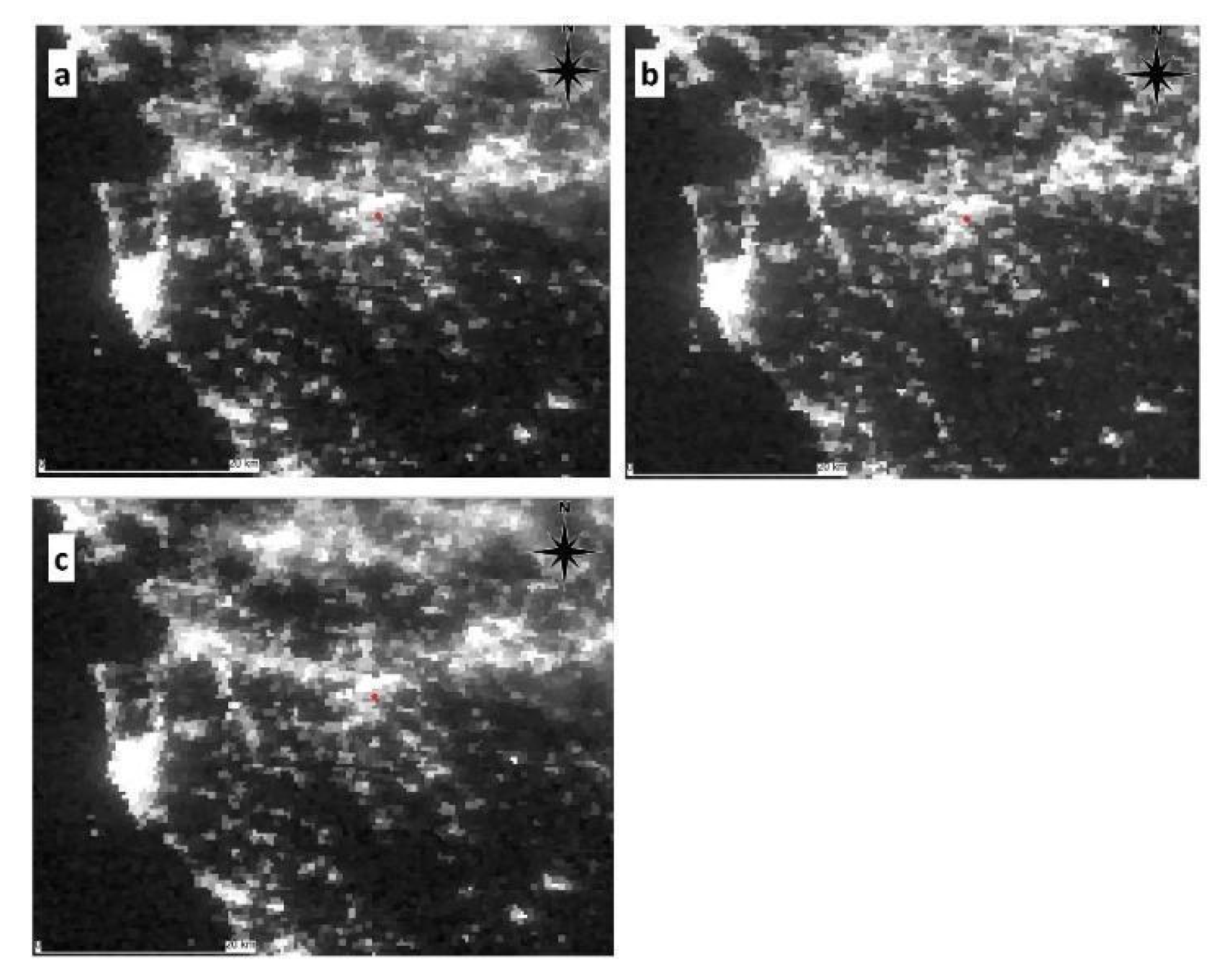
3.3. Analysis of Orthophoto in Multispectral RGB
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hoelker, F.; Wolter, C.; Perkin, E.K.; Tockner, K. Light pollution as a biodiversity threat. Trends Ecol. Evol. 2010, 25, 681–682. [Google Scholar] [CrossRef] [PubMed]
- Kyba, C.C.M.; Kuester, T.; de Miguel, A.S.; Baugh, K.; Jechow, A.; Hölker, F.; Bennie, J.; Elvidge, C.D.; Gaston, K.J.; Guanter, L. Artificially lit surface of Earth at night increasing in radiance and extent. Sci. Adv. 2017, 3, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Kyba, C.C.M.; Hölker, F. Do artificially illuminated skies affect biodiversity in nocturnal landscapes? Landsc. Ecol. 2013, 28, 1637–1640. [Google Scholar] [CrossRef] [Green Version]
- Duriscoe, D.; Luginbuhl, C.; Elvidge, C. The relation of outdoor lighting characteristics to skyglow from distant cities. Light Res. Technol. 2014, 46, 35–49. [Google Scholar] [CrossRef]
- Longcore, T.; Rich, C. Ecological light pollution. Front. Ecol. Environ. 2004, 2, 191–198. [Google Scholar] [CrossRef]
- Gaston, K.J.; Bennie, J.; Davies, T.W.; Hopkins, J. The ecological impacts of nighttime light pollution: A mechanistic appraisal. Biol. Rev. 2013, 88, 912–927. [Google Scholar] [CrossRef] [PubMed]
- Davies, T.W.; Duffy, J.P.; Bennie, J.; Gaston, K.J. The nature, extent, and ecological implications of marine light pollution. Front. Ecol. Environ. 2014, 12, 347–355. [Google Scholar] [CrossRef] [Green Version]
- Gaston, K.J.; Duffy, J.P.; Bennie, J. Quantifying the erosion of natural darkness in the global protected area system: Decline of darkness within protected areas. Conserv. Biol. 2015, 29, 1132–1141. [Google Scholar] [CrossRef]
- Bennie, J.; Davies, T.W.; Cruse, D.; Gaston, K.J. Ecological effects of artificial light at night on wild plants. J. Ecol. 2016, 104, 611–620. [Google Scholar] [CrossRef] [Green Version]
- Dimitriadis, C.; Fournari-Konstantinidou, I.; Sourbèsa, L.; Koutsoubas, D.; Mazaris, A.D. Reduction of sea turtle population recruitment caused by nightlight: Evidence from the Mediterranean region. Ocean. Coast Manag. 2018, 153, 108–115. [Google Scholar] [CrossRef]
- Grubisic, M.; van Grunsven, R.H.A.; Kyba, C.C.M.; Manfrin, A.; Hölker, F. Insect declines and agroecosystems: Does light pollution matter?: Insect declines and agroecosystems. Ann. Appl. Biol. 2018, 173, 180–189. [Google Scholar] [CrossRef]
- Grubisic, M.; Haim, A.; Bhusal, P.; Dominoni, D.M.; Gabriel, K.M.A.; Jechow, A.; Kupprat, F.; Lerner, A.; Marchant, P.; Riley, W.; et al. Light pollution, circadian photoreception, and melatonin in vertebrates. Sustainability 2019, 11, 6400. [Google Scholar] [CrossRef] [Green Version]
- Dominoni, D.M.; Smit, J.A.H.; Visser, M.E.; Halfwerk, W. Multisensory pollution: Artificial light at night and anthropogenic noise have interactive effects on activity patterns of great tits (Parus major). Environ. Pollut. 2020, 256, 113314. [Google Scholar] [CrossRef] [PubMed]
- Maggi, E.; Bongiorni, L.; Fontanini, D.; Capocchi, A.; Dal Bello, M.; Giacomelli, A.; Benedetti-Cecchi, L. Artificial light at night erases positive interactions across trophic levels. Funct. Ecol. 2020, 34, 694–706. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Q.; Wang, T.; Pan, J. Light pollution disrupts molecular clock in avian species: A power-calibrated meta-analysis. Environ. Pollut. 2020, 265, 114206. [Google Scholar] [CrossRef] [PubMed]
- Cathey, A.R.; Campbell, L.E. Effectiveness of five vision-lighting sources on photoregulation of 22 species of ornamental plants. J. Am. Soc. Hortic. Sci. 1975, 100, 65–71. [Google Scholar]
- Ffrench-Constant, R.H.; Somers-Yeates, R.; Bennie, J.; Economou, T.; Hodgson, D.; Spalding, A.; McGregor, P.K. Light pollution is associated with earlier tree budburst across the United Kingdom. Proc. R. Soc. B 2016, 283, 20160813. [Google Scholar] [CrossRef]
- Škvareninová, J.; Tuhárska, M.; Škvarenina, J.; Babálová, D.; Slobodníková, L.; Slobodník, B.; Středová, H.; Minďaš, J.J. Effects of light pollution on tree phenology in the urban environment. Morav. Geogr. Rep. 2017, 25, 282–290. [Google Scholar] [CrossRef] [Green Version]
- Bennie, J.; Davies, T.W.; Cruse, D.; Inger, R.; Gaston, K.J. Artificial light at night causes top-down and bottom-up trophic effects on invertebrate populations. J. Appl. Ecol. 2018, 55, 2698–2706. [Google Scholar] [CrossRef]
- Massetti, L. Assessing the impact of street lighting on Platanus x acerifolia phenology. Urban Urban Green 2018, 34, 71–77. [Google Scholar] [CrossRef]
- Haim, A.; Abed, E.Z. Artificial light at night: Melatonin as a mediator between the environment and epigenome. Phil. Trans. R. Soc. B 2015, 370, 20140121. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Touitou, Y.; Reinberg, A.; Touitou, D. Association between light at night, melatonin secretion, sleep deprivation, and the internal clock: Health impacts and mechanisms of circadian disruption. Life Sci. 2017, 173, 94–106. [Google Scholar] [CrossRef] [PubMed]
- Svechkina, A.; Portnov, B.A.; Trop, T. The impact of artificial light at night on human and ecosystem health: A systematic literature review. Landsc. Ecol. 2020, 35, 1725–1742. [Google Scholar] [CrossRef]
- Shi, K.; Yu, B.; Huang, Y.; Hu, Y.; Yin, B.; Chen, Z.; Chen, L.; Wu, J. Evaluating the Ability of NPP-VIIRS Nighttime Light Data to Estimate the Gross Domestic Product and the Electric Power Consumption of China at Multiple Scales: A Comparison with DMSP-OLS Data. Remote Sens. 2014, 6, 1705–1724. [Google Scholar] [CrossRef] [Green Version]
- Katz, Y.; Levin, N. Quantifying urban light pollution—A comparison between field measurements and EROS-B imagery. Remote Sens. Environ. 2016, 177, 65–77. [Google Scholar] [CrossRef]
- Levin, N.; Kyba, C.C.M.; Zhang, Q.; de Miguel, A.S.; Román, M.O.; Li, X.; Portnov, B.A.; Molthan, A.L.; Jechow, A.; Miller, S.D.; et al. Remote sensing of night lights: A review and an outlook for the future. Remote Sens. Environ. 2020, 237, 111443. [Google Scholar] [CrossRef]
- Barentine, J.C.; Walczak, K.; Gyuk, G.; Tarr, C.; Longcore, T. A Case for a New Satellite Mission for Remote Sensing of Night Lights. Remote Sens. 2021, 13, 2294. [Google Scholar] [CrossRef]
- Ribas, S.J.; Figueras, F.; Paricio, S.; Canal-Domingo, R.; Torra, J. How clouds are amplifying (or not) the effects of ALAN. Int. J. Sustain. Light 2016, 35, 32–39. [Google Scholar] [CrossRef]
- Posch, T.; Binder, F.; Puschnig, J. Systematic measurements of the night sky brightness at 26 locations in Eastern Austria. J. Quant. Spectrosc. Radiat. Transf. 2018, 211, 144–165. [Google Scholar] [CrossRef] [Green Version]
- Bará, S.; Lima, R.C.; Zamorano, J. Monitoring Long-Term Trends in the Anthropogenic Night Sky Brightness. Sustainability 2019, 11, 3070. [Google Scholar] [CrossRef] [Green Version]
- Bertolo, A.; Binotto, R.; Ortolani, S.; Sapienza, S. Measurements of Night Sky Brightness in the Veneto Region of Italy: Sky Quality Meter Network Results and Differential Photometry by Digital Single Lens Reflex. J. Imaging 2019, 5, 56. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zamorano, J.; Tapia, C.; Pascual, S.; García, C.; González, R.; González, E.; Corcho, O.; García, L.; Gallego, J.; de Miguel, A.S.; et al. Night sky brightness monitoring in Spain. In Proceedings of the Highlights on Spanish Astrophysics X. Proceedings of the XIII Scientific Meeting of the Spanish Astronomical Society, Salamanca, Spain, 16–20 July 2018; Montesinos, B., Asensio Ramos, A., Buitrago, F., Schödel, R., Villaver, E., Pérez-Hoyos, S., Ordóñez-Etxeberria, I., Eds.; pp. 599–604, ISBN 978-84-09-09331-1. [Google Scholar]
- Massetti, L. Drivers of artificial light at night variability in urban, rural and remote areas. J. Quant. Spectro. Radiat. Trans. 2020, 255, 107250. [Google Scholar] [CrossRef]
- Caruana, J.; Vella, R.; Spiteri, D.; Nolle, M.; Fenech, S.; Aquilina, N.J. A photometric mapping of the night sky brightness of the Maltese islands. J. Environ. Manag. 2020, 261, 110196. [Google Scholar] [CrossRef] [Green Version]
- Lampar, H.A.S.; Kocifaj, M. Urban artificial light emission function determined experimentally using night sky images. J. Quant. Spectrosc. Radiat. 2016, 181, 87–95. [Google Scholar]
- Jechow, A.; Kolláth, Z.; Ribas, S.J.; Spoelstra, H.; Hölker, F.; Kyba, C.C.M. Imaging and mapping the impact of clouds on skyglow with all-sky photometry. Sci. Rep. 2017, 7, 6741. [Google Scholar] [CrossRef] [PubMed]
- Kolláth, Z.; Dömény, A. Night sky quality monitoring in existing and planned dark sky parks by digital cameras. Int. J. Sustain. Light 2017, 19, 61–68. [Google Scholar] [CrossRef]
- Jechow, A.; Ribas, S.J.; Domingo, R.C.; Hölker, F.; Kolláth, Z.; Kyba, C.C.M. Tracking the dynamics of skyglow with differential photometry using a digital camera with fisheye lens. J. Quant. Spectrosc. Radiat. Transf. 2018, 209, 212–223. [Google Scholar] [CrossRef] [Green Version]
- Hänel, A.; Posch, T.; Ribas, S.J.; Aubé, M.; Duriscoe, D.; Jechow, A.; Kollath, Z.; Lolkema, D.E.; Moore, C.; Schmidt, N.; et al. Measuring night sky brightness: Methods and challenges. J. Quant. Spectrosc. Radiat. Transf. 2018, 205, 278–290. [Google Scholar] [CrossRef] [Green Version]
- De Miguel, A.S.; Aubé, M.; Zamorano, J.; Kocifaj, M.; Roby, J.; Tapia, C. Sky Quality Meter measurements in a colour-changing world. Mon. Not. R. Astron. Soc. 2017, 467, 2966–2979. [Google Scholar] [CrossRef]
- Puschnig, J.; Näslund, M.; Schwope, A.; Wallner, S. Correcting sky-quality-meter measurements for ageing effects using twilight as calibrator. Mon. Not. R. Astron. Soc. 2021, 502, 1095–1103. [Google Scholar] [CrossRef]
- Bartolomei, M.; Olivieri, L.; Bettanini, C.; Cavazzani, S.; Fiorentin, P. Verification of Angular Response of Sky Quality Meter with Quasi-Punctual Light Sources. Sensors 2021, 21, 7544. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, W.; Spoelstra, H. Darkness Monitoring in the Netherlands 2009–2019; NachtMeetnet: Utrecht, The Netherlands, 2020. [Google Scholar]
- Falchi, F.; Cinzano, P.; Duriscoe, D.; Kyba, C.C.M.; Elvidge, C.D.; Baugh, K.; Portno, B.; Rybnikova, N.A.; Furgoni, R. The new world atlas of artificial night sky brightness. Sci. Adv. 2016, 2, e1600377. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kyba, C.C.M.; Garz, S.; Kuechly, H.; de Miguel, A.S.; Zamorano, J.; Fischer, J.; Holker, F. High-resolution imagery of earth at night: New sources, opportunities and challenges. Remote Sens. 2015, 7, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Ma, R.; Zhang, Q.; Li, D.; Liu, S.; He, T.; Zhao, L. Anisotropic characteristic of artificial light at night—systematic investigation with viirs dnb multi-temporal observations. Remote Sens. Environ. 2019, 233, 111357. [Google Scholar] [CrossRef]
- Li, X.J.; Duarte, F.; Ratti, C. Analyzing the obstruction effects of obstacles on light pollution caused by street lighting system in cambridge, massachusetts. Environ. Plan. B Urban Anal. City Sci. 2021, 48, 216–230. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Toscano, P.; Cinat, P.; Berton, A.; Matese, A. A Low-Cost and Unsupervised Image Recognition Methodology for Yield Estimation in a Vineyard. Front. Plant Sci. 2019, 10, 559. [Google Scholar] [CrossRef] [Green Version]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicles Forest Remote Sensing—A Systematic Review. Part II: Research Applications. Forests 2021, 12, 397. [Google Scholar] [CrossRef]
- Luppichini, M.; Bini, M.; Paterni, M.; Berton, A.; Merlino, S. A New Beach Topography-Based Method for Shoreline Identification. Water 2020, 12, 3110. [Google Scholar] [CrossRef]
- Andriolo, U.; Gonçalves, G.; Bessa, F.; Sobral, P. Mapping marine litter on coastal dunes with unmanned aerial systems: A showcase on the Atlantic Coast. Sci. Total Environ. 2020, 736, 139632. [Google Scholar] [CrossRef]
- Merlino, S.; Paterni, M.; Berton, A.; Massetti, L. Unmanned Aerial Vehicles for Debris Survey in Coastal Areas: Long-Term Monitoring Programme to Study Spatial and Temporal Accumulation of the Dynamics of Beached Marine Litter. Remote Sens. 2020, 12, 1260. [Google Scholar] [CrossRef] [Green Version]
- Salgado-Hernanz, P.M.; Bauza, J.; Alomar, C.; Compa, M.; Romero, L.; Deudero, S. Assessment of marine litter through remote sensing: Recent approaches and future goals. Mar. Pollut. Bull. 2021, 168, 112347. [Google Scholar] [CrossRef] [PubMed]
- Pucino, N.; Kennedy, D.M.; Carvalho, R.C.; Allan, B.; Ierodiaconou, D. Citizen science for monitoring seasonal-scale beach erosion and behaviour with aerial drones. Sci. Rep. 2021, 11, 3935. [Google Scholar] [CrossRef] [PubMed]
- Merlino, S.; Paterni, M.; Locritani, M.; Andriolo, U.; Gonçalves, G.; Massetti, L. Citizen science for marine litter detection and classification on Unmanned Aerial Vehicle images. Water 2021, 13, 3349. [Google Scholar] [CrossRef]
- Bouroussis, C.A.; Topalis, F.V. Assessment of outdoor lighting installations and their impact on light pollution using unmanned aircraft systems-The concept of the drone-gonio-photometer. J. Quant. Spectrosc. Radiat. Transf. 2020, 253, 107155. [Google Scholar] [CrossRef]
- Reagan, J. Spanish Company Deploys Drones to Battle Light Pollution. 2018. Available online: https://dronelife.com/2018/02/13/spanish-company-deploys-drones-battle-lightpollution/ (accessed on 21 April 2022).
- Fiorentin, P.; Bettanini, C.; Bogoni, D. Calibration of an Autonomous Instrument for Monitoring Light Pollution from Drones. Sensors 2019, 23, 5091. [Google Scholar] [CrossRef] [Green Version]
- Guk, E.; Levin, N. Analyzing spatial variability in nighttime lights using a high spatial resolution color Jilin-1 image—Jerusalem as a case study. J. Photogramm. Remote Sens. 2020, 163, 121–136. [Google Scholar] [CrossRef]
- Kong, W.; Cheng, J.; Liu, X.; Zhang, F.; Fei, T. Incorporating nocturnal UAV sideview images with VIIRS data for accurate population estimation: A test at the urban administrative district scale. Int. J. Remote Sens. 2019, 40, 8528–8546. [Google Scholar] [CrossRef]
- Tabaka, P. Pilot Measurement of Illuminance in the Context of Light Pollution Performed with an Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 2124. [Google Scholar] [CrossRef]
- Xu, Y.; Knudby, A.; Côté-Lussier, C. Mapping ambient light at night using field observations and high-resolution remote sensing imagery for studies of urban environments. Build. Environ. 2018, 145, 104–114. [Google Scholar] [CrossRef]
- Li, X.; Levin, N.; Xie, J.; Li, D. Monitoring hourly night-time light by an unmanned aerial vehicle and its implications to satellite remote sensing. Remote Sens. Environ. 2020, 247, 111942. [Google Scholar] [CrossRef]
- Darrodi, M.M.; Finlayson, G.; Goodman, T.; Mackiewicz, M. Reference data set for camera spectral sensitivity estimation. J. Opt. Soc. Am. A 2018, 32, 381–391. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burggraaff, O.; Schmidt, N.; Zamorano, J.; Pauly, K.; Pascual, S.; Tapia, C.; Spyrakos, E.; Snik, F. Standardized spectral and radiometric calibration of consumer cameras. Optics Express 2019, 27, 19075–19101. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kolláth, Z.; Cool, A.; Jechow, A.; Kolláth, K.; Száz, D.; Tong, K.-P. Introducing the dark sky unit for multi-spectral measurement of the night sky quality with commercial digital cameras. J. Quant. Spectro. Radiat. Trans. 2019, 253, 107162. [Google Scholar] [CrossRef]
- Leeuw, T.; Boss, E. The HydroColor app: Above water measurements of remote sensing reflectance and turbidity using a smartphone camera. Sensors 2018, 18, 256. [Google Scholar] [CrossRef] [Green Version]
- Kyba, C.C.M.; Ruhtz, T.; Fischer, J.; Hölker, F. Cloud Coverage Acts as an Amplifier for Ecological Light Pollution in Urban Ecosystems. PLoS ONE 2011, 6, e17307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Puschnig, J.; Schwope, A.; Posch, T.; Schwarz, R. The night sky brightness at Potsdam-Babelsberg including overcast and moonlit conditions. J. Quant. Spectro. Radiat. Trans. 2014, 139, 76–81. [Google Scholar] [CrossRef] [Green Version]
- Cavazzani, S.; Ortolani, S.; Bertolo, A.; Binotto, R.; Fiorentin, P.; Carraro, G.; Saviane, I.; Zitelli, V. Sky Quality Meter and satellite correlation for night cloud-cover analysis at astronomical sites. Mon. Not. R. Astron. Soc. 2020, 493, 2463–2471. [Google Scholar] [CrossRef] [Green Version]
- Bará, S.; Rigueiro, I.; Lima, R.C. Monitoring transition: Expected night sky brightness trends in different photometric bands. J. Quant. Spectro. Radiat. Trans. 2019, 239, 106644. [Google Scholar] [CrossRef] [Green Version]
- Cinzano, P. Report on Sky Quality Meter, Version L. 2007. Available online: http://unihedron.com/projects/sqm-l/sqmreport2.pdf (accessed on 25 October 2021).
- Poynton, C. Digital Video and HD: Algorithms and Interfaces; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Night | Altitude (m) | Number of Images | Camera Setting | NSB (mpsas) (Begin–End) |
|---|---|---|---|---|---|
| A1 | 3 April 2021 | 70 | 14 | fn = 2.8, exp = 1/6.25 s, ISO = 400 | 19.08–19.05 |
| A2 | 3 April 2021 | 100 | 19 | fn = 2.8, exp = 1/6.25 s, ISO = 400 | 19.05–19.00 |
| B1 | 23 April 2021 | 70 | 23 | fn = 2.8, exp = 1/6.25 s, ISO = 400 | 19.09–19.11 |
| B2 | 23 April 2021 | 100 | 25 | fn = 2.8, exp = 1/6.25 s, ISO = 400 | 19.11–19.19 |
| C1 | 15 June 2021 | 70 | 25 | fn = 2.8, exp = ¼ s, ISO = 400 | 19.04–19.07 |
| C2 | 15 June 2021 | 70 | 28 | fn = 2.8, exp = ½ s, ISO = 400 | 18.99–18.91 |
| Index | Date | Set | Distance | N. Images | tau | R2 |
|---|---|---|---|---|---|---|
| Is | 3 April 2021 | A1 | 70 | 14 | −0.49 * | 0.76 ** |
| Rs | 3 April 2021 | A1 | 70 | 14 | −0.42 * | 0.72 ** |
| Gs | 3 April 2021 | A1 | 70 | 14 | −0.53 ** | 0.77 ** |
| Bs | 3 April 2021 | A1 | 70 | 14 | 0.04 | 0.05 |
| Is | 3 April 2021 | A2 | 100 | 19 | −0.56 ** | 0.87 ** |
| Rs | 3 April 2021 | A2 | 100 | 19 | −0.56 ** | 0.86 ** |
| Gs | 3 April 2021 | A2 | 100 | 19 | −0.56 ** | 0.88 ** |
| Bs | 3 April 2021 | A2 | 100 | 19 | −0.14 | 0.22 * |
| Is | 23 April 2021 | B1 | 70 | 23 | −0.56 ** | 0.57 ** |
| Rs | 23 April 2021 | B1 | 70 | 23 | −0.58 ** | 0.57 ** |
| Gs | 23 April 2021 | B1 | 70 | 23 | −0.58 ** | 0.58 ** |
| Bs | 23 April 2021 | B1 | 70 | 23 | −0.08 | 0.33 ** |
| Is | 23 April 2021 | B2 | 100 | 25 | −0.53 ** | 0.53 ** |
| Rs | 23 April 2021 | B2 | 100 | 25 | −0.51 ** | 0.5 ** |
| Gs | 23 April 2021 | B2 | 100 | 25 | −0.52 ** | 0.55 ** |
| Bs | 23 April 2021 | B2 | 100 | 25 | 0.01 | 0.03 |
| Error | Set | Is | Rs | Gs | Bs |
|---|---|---|---|---|---|
| A1 | 0.08 | 0.11 | 0.07 | 0.00 | |
| ME (mpsas) | A2 1 | 0.00 | 0.00 | 0.00 | 0.00 |
| B1 | −0.08 | −0.08 | −0.09 | 0.06 | |
| B2 | −0.10 | −0.17 | −0.07 | 0.03 | |
| A1 | 0.46 | 0.49 | 0.45 | 0.89 | |
| RMSE (mpsas) | A2 1 | 0.21 | 0.22 | 0.20 | 0.48 |
| B1 | 0.45 | 0.45 | 0.45 | 0.57 | |
| B2 | 0.41 | 0.45 | 0.40 | 0.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Massetti, L.; Paterni, M.; Merlino, S. Monitoring Light Pollution with an Unmanned Aerial Vehicle: A Case Study Comparing RGB Images and Night Ground Brightness. Remote Sens. 2022, 14, 2052. https://doi.org/10.3390/rs14092052
Massetti L, Paterni M, Merlino S. Monitoring Light Pollution with an Unmanned Aerial Vehicle: A Case Study Comparing RGB Images and Night Ground Brightness. Remote Sensing. 2022; 14(9):2052. https://doi.org/10.3390/rs14092052
Chicago/Turabian StyleMassetti, Luciano, Marco Paterni, and Silvia Merlino. 2022. "Monitoring Light Pollution with an Unmanned Aerial Vehicle: A Case Study Comparing RGB Images and Night Ground Brightness" Remote Sensing 14, no. 9: 2052. https://doi.org/10.3390/rs14092052