
Drone-Borne Ground-Penetrating Radar for Snow Cover Mapping



Abstract
:1. Introduction
2. Materials and Methods
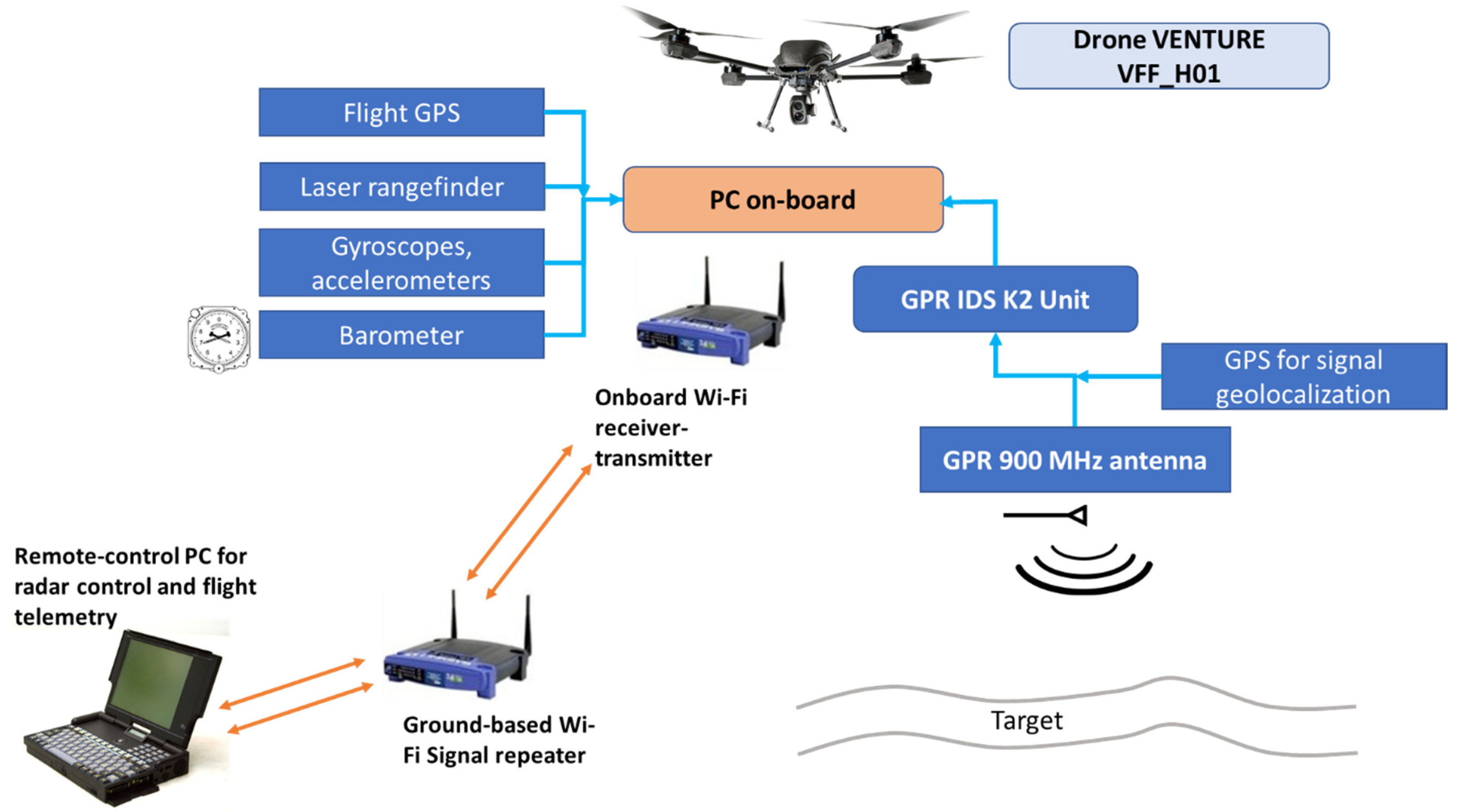
2.1. Drone Coupled with GPR Antenna
2.2. GPR Data Processing and Data Information
3. Test Sites
3.1. Cheneil Test Site
3.2. Gressoney Test Site
4. Results
4.1. Cheneil Test Site: Calibration
4.2. Cheneil Test Site: Sections from Drone
4.3. Cheneil Test Site: Mapping
4.4. Gressoney Test Site
4.5. Gressoney Test Site: Calibration GPR-Rangefinder
4.6. Gressoney Test Site: Mapping
5. Discussion
5.1. Resolution
5.2. Accuracy
5.3. Flight Altitude
5.4. System Setup
5.5. Logistical Issues
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Marshall, H.-P.; Schneebeli, M.; Koh, G. Snow Stratigraphy Measurements with High-Frequency FMCW Radar: Comparison with Snow Micro-Penetrometer. Cold Reg. Sci. Technol. 2007, 47, 108–117. [Google Scholar] [CrossRef]
- Rodriguez-Morales, F.; Byers, K.; Crowe, R.; Player, K.; Hale, R.D.; Arnold, E.J.; Smith, L.; Gifford, C.M.; Braaten, D.; Panton, C.; et al. Advanced Multifrequency Radar Instrumentation for Polar Research. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2824–2842. [Google Scholar] [CrossRef]
- Kim, Y.; Reck, T.J.; Alonso-del Pino, M.; Painter, T.H.; Marshall, H.-P.; Bair, E.H.; Dozier, J.; Chattopadhyay, G.; Liou, K.-N.; Chang, M.-C.F.; et al. A Ku-Band CMOS FMCW Radar Transceiver for Snowpack Remote Sensing. IEEE Trans. Microw. Theory Tech. 2018, 66, 2480–2494. [Google Scholar] [CrossRef]
- Godio, A.; Rege, R.B. The Mechanical Properties of Snow and Ice of an Alpine Glacier Inferred by Integrating Seismic and GPR Methods. J. Appl. Geophys. 2015, 115, 92–99. [Google Scholar] [CrossRef]
- Godio, A.; Rege, R.B. Analysis of Georadar Data to Estimate the Snow Depth Distribution. J. Appl. Geophys. 2016, 129, 92–100. [Google Scholar] [CrossRef]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The Use of Unmanned Aerial Vehicles (UAVs) for Engineering Geology Applications. Bull. Eng. Geol. Environ. 2020, 79, 3437–3481. [Google Scholar] [CrossRef] [Green Version]
- Yan, J.-B.; Gomez-Garcia Alvestegui, D.; McDaniel, J.W.; Li, Y.; Gogineni, S.; Rodriguez-Morales, F.; Brozena, J.; Leuschen, C.J. Ultrawideband FMCW Radar for Airborne Measurements of Snow Over Sea Ice and Land. IEEE Trans. Geosci. Remote Sens. 2017, 55, 834–843. [Google Scholar] [CrossRef]
- Yankielun, N.; Rosenthal, W.; Davis, R.E. Alpine Snow Depth Measurements from Aerial FMCW Radar. Cold Reg. Sci. Technol. 2004, 40, 123–134. [Google Scholar] [CrossRef]
- Tan, A.; Eccleston, K.; Platt, I.; Woodhead, I.; Rack, W.; McCulloch, J. The Design of a UAV Mounted Snow Depth Radar: Results of Measurements on Antarctic Sea Ice. In Proceedings of the 2017 IEEE Conference on Antenna Measurements & Applications (CAMA), Tsukuba, Japan, 4–6 December 2017; pp. 316–319. [Google Scholar]
- Tarchi, D.; Guglieri, G.; Vespe, M.; Gioia, C.; Sermi, F.; Kyovtorov, V. Mini-Radar System for Flying Platforms. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 40–44. [Google Scholar]
- Grab, M.; Bauder, A.; Ammann, F.; Langhammer, L.; Hellmann, S.; Church, G.J.; Schmid, L.; Rabenstein, L.; Maurer, H.R. Ice Volume Estimates of Swiss Glaciers Using Helicopter-Borne GPR—An Example from the Glacier de La Plaine Morte. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar]
- Dematteis, N.; Troilo, F.; Grab, M.; Maurer, H.; Giordan, D. Identification of Bedrock Topography-Related Ice Fractures in the Planpincieux Glacier Using Helicopter-Borne GPR and DTM Analysis. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 1043–1046. [Google Scholar]
- Rutishauser, A.; Maurer, H.; Bauder, A. Helicopter-Borne Ground-Penetrating Radar Investigations on Temperate Alpine Glaciers: A Comparison of Different Systems and Their Abilities for Bedrock Mapping. Geophysics 2016, 81, WA119–WA129. [Google Scholar] [CrossRef]
- Merz, K.; Green, A.G.; Buchli, T.; Springman, S.M.; Maurer, H. A New 3-D Thin-skinned Rock Glacier Model Based on Helicopter GPR Results from the Swiss Alps. Geophys. Res. Lett. 2015, 42, 4464–4472. [Google Scholar] [CrossRef]
- Grab, M.; Mattea, E.; Bauder, A.; Huss, M.; Rabenstein, L.; Hodel, E.; Linsbauer, A.; Langhammer, L.; Schmid, L.; Church, G.; et al. Ice Thickness Distribution of All Swiss Glaciers Based on Extended Ground-Penetrating Radar Data and Glaciological Modeling. J. Glaciol. 2021, 67, 1074–1092. [Google Scholar] [CrossRef]
- Langhammer, L.; Rabenstein, L.; Schmid, L.; Bauder, A.; Grab, M.; Schaer, P.; Maurer, H. Glacier Bed Surveying with Helicopter-Borne Dual-Polarization Ground-Penetrating Radar. J. Glaciol. 2019, 65, 123–135. [Google Scholar] [CrossRef] [Green Version]
- Li, C.J.; Ling, H. High-Resolution, Downward-Looking Radar Imaging Using a Small Consumer Drone. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, PR, USA, 26 June–1 July 2016; pp. 2037–2038. [Google Scholar]
- Cabrera, R.A.; Bekic, G. Drone-Borne Ground-Penetrating Radar Suitability for Specific Surveys: A Comparative Study of Feature Sizes versus Antenna Frequency and Elevation over the Ground. First Break 2018, 36, 83–89. [Google Scholar] [CrossRef]
- Jenssen, R.O.R.; Eckerstorfer, M.; Jacobsen, S.; Storvold, R. Drone-Mounted UWB Radar System for Measuring Snowpack Properties: Technical Implementation, Specifications and Initial Results. In Proceedings of the International Snow Science Workshop, Innsbruck, Austria, 7–12 October 2018. [Google Scholar]
- Jenssen, R.O.R.; Eckerstorfer, M.; Jacobsen, S. Drone-Mounted Ultrawideband Radar for Retrieval of Snowpack Properties. IEEE Trans. Instrum. Meas. 2020, 69, 221–230. [Google Scholar] [CrossRef] [Green Version]
- Oborne, M. Mission Planner; ArduPilot Dev Team: Canberra, ACT, Australia, 2021. [Google Scholar]
- TeamViewer; TeamViewer: Göppingen, Germany, 2021.
- Riley, E.J.; Lenzing, E.H.; Narayanan, R.M. Characterization of Radar Cross Section of Carbon Fiber Composite Materials. In Radar Sensor Technology XIX; and Active and Passive Signatures, VI; Ranney, K.I., Doerry, A., Gilbreath, G.C., Hawley, C.T., Eds.; International Society for Optics and Photonics: Baltimore, MD, USA, 21 May 2015; p. 946103. [Google Scholar]
- Sandmeier, K.-J. Reflexw; Sandmeyer Geophysical Research: Karlsruhe, Germany, 2021. [Google Scholar]
- Forte, E.; Dossi, M.; Colucci, R.R.; Pipan, M. A New Fast Methodology to Estimate the Density of Frozen Materials by Means of Common Offset GPR Data. J. Appl. Geophys. 2013, 99, 135–145. [Google Scholar] [CrossRef]
- Previati, M.; Godio, A.; Ferraris, S. Validation of Spatial Variability of Snowpack Thickness and Density Obtained with GPR and TDR Methods. J. Appl. Geophys. 2011, 75, 284–293. [Google Scholar] [CrossRef]
- Looyenga, H. Dielectric Constants of Heterogeneous Mixtures. Physica 1965, 31, 401–406. [Google Scholar] [CrossRef]
- Glen, J.W.; Paren, J.G. The Electrical Properties of Snow and Ice. J. Glaciol. 1975, 15, 15–38. [Google Scholar] [CrossRef] [Green Version]
- Godio, A. Georadar Measurements for the Snow Cover Density. Am. J. Appl. Sci. 2009, 6, 414–423. [Google Scholar] [CrossRef] [Green Version]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021. [Google Scholar]
- The MathWorks Inc. MATLAB; The MathWorks Inc.: Natick, MA, USA, 2021. [Google Scholar]
- QGIS Development Team. QGIS Geographic Information System; Open Source Geospatial Foundation: Chicago, IL, USA, 2021. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weight and Dimensions | |
|---|---|
| Max take-off weight | 12 kg (estimated) |
| Max payload (including batteries) | 7 kg |
| Min container size | 500 × 500 × 500 mm (to be adapted to the size of the GPR antenna) |
| Height | 80 cm |
| Max width | 2 m |
| Flight equipment | |
| Central body | Carbon/ CNC machined light-alloy |
| Propellers (4×) | 28″ (diameter) × 9.2″ (pitch), foldable |
| Engines (4×) | Brushless, Heavy-duty IP35 |
| Batteries (2×) | Li-Po Very high energy density, 6s 5p 2 × 9000 mAh (safe use: 7000 mAh) |
| Autopilot | Pixhawk2 with triple redundancy IMU system + embedded Raspberry companion computer |
| Laser altimeter | Range 100 m, resolution 1 cm |
| Telemetry | Microhard P2400, range 20 km, 1 W |
| Radio control | Yeti DS24 Hall effect Joystick, configured on LAN |
| Protection for internal electronic components | Against dust and water splashes |
| Flight performances | |
| Flight duration without payload with two batteries (15% remaining charge, sea level, stationary flight without wind) | 50 min |
| Flight duration with 6000 g payload with two batteries (15% remaining charge, sea level, stationary flight without wind) | 15 min |
| Max cruise speed | 12 m/s |
| Max wind for safe conditions | 8 m/s |
| Flight modes | Automatic |
| GPS-related manual | |
| Constant height (>1 m) laser-assisted | |
| Acquisition devices | |
| GPR acquisition unit + GPR antenna 900 MHz | Frontal camera |
| Onboard mini PC | GPS |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vergnano, A.; Franco, D.; Godio, A. Drone-Borne Ground-Penetrating Radar for Snow Cover Mapping. Remote Sens. 2022, 14, 1763. https://doi.org/10.3390/rs14071763
Vergnano A, Franco D, Godio A. Drone-Borne Ground-Penetrating Radar for Snow Cover Mapping. Remote Sensing. 2022; 14(7):1763. https://doi.org/10.3390/rs14071763
Chicago/Turabian StyleVergnano, Andrea, Diego Franco, and Alberto Godio. 2022. "Drone-Borne Ground-Penetrating Radar for Snow Cover Mapping" Remote Sensing 14, no. 7: 1763. https://doi.org/10.3390/rs14071763