
Anthropogenic Illumination as Guiding Light for Nocturnal Bird Migrants Identified by Remote Sensing


Abstract
:
1. Introduction
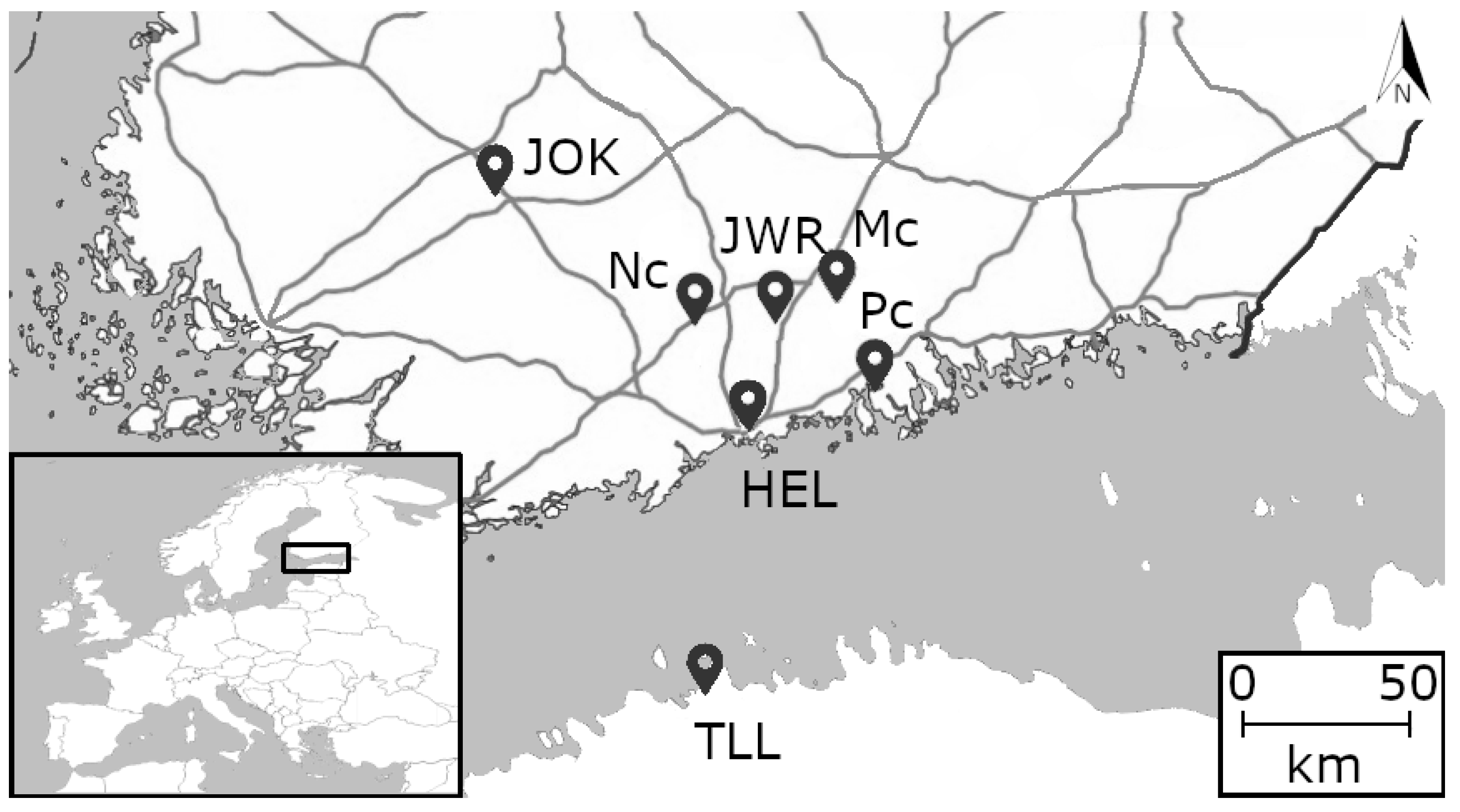
2. Materials and Methods
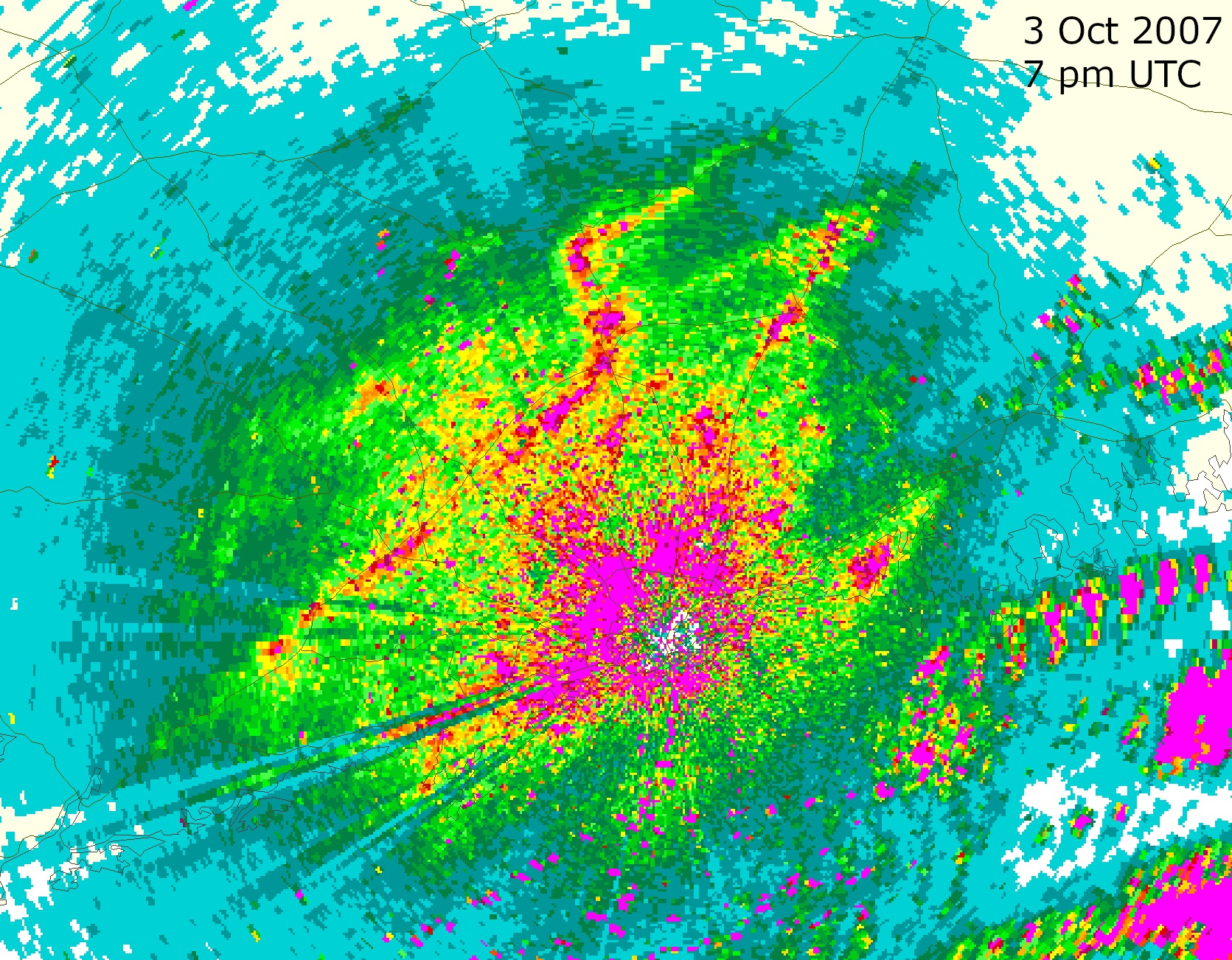
2.1. Weather Radar Measurements
2.2. Meteorological Data
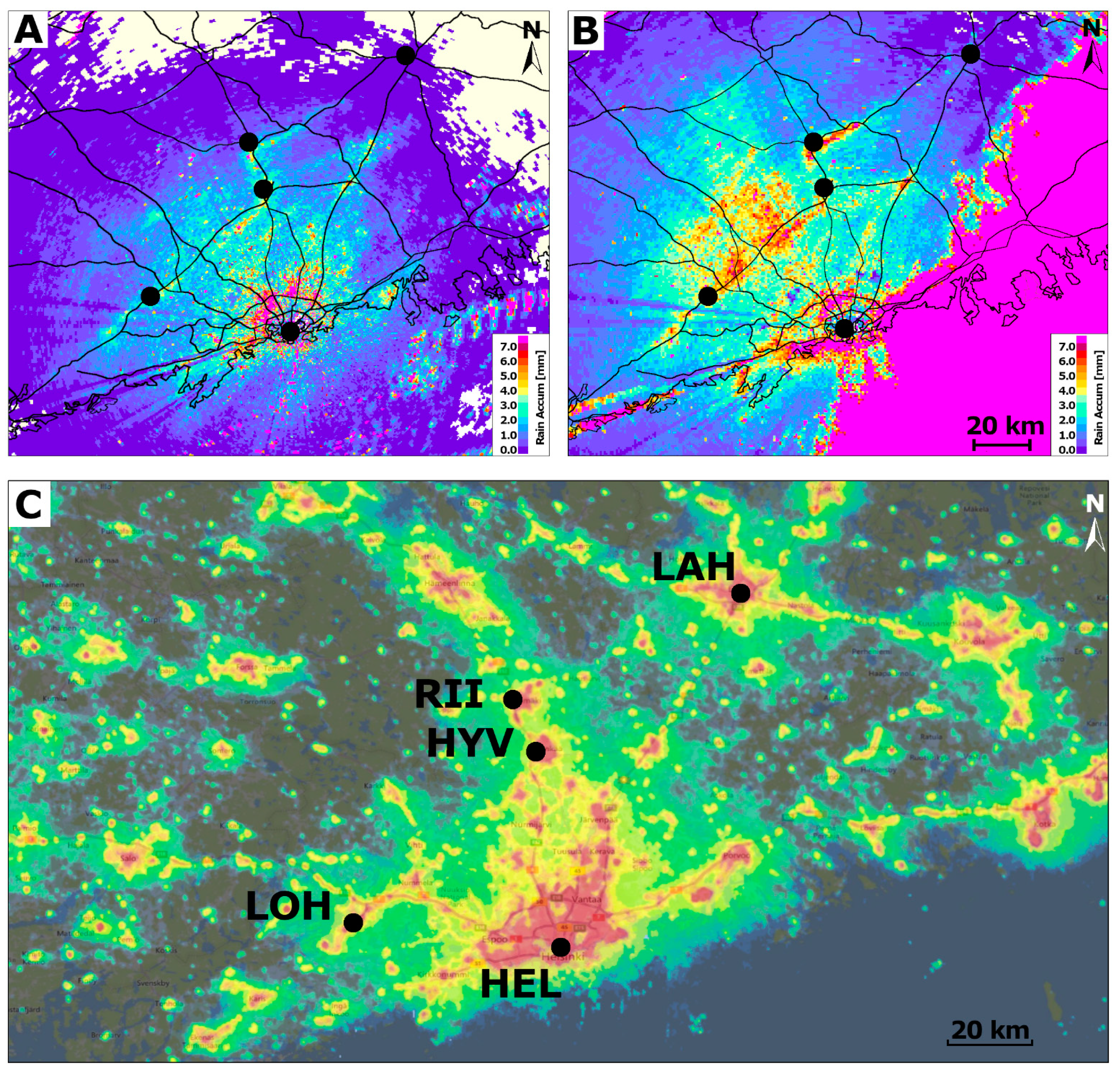
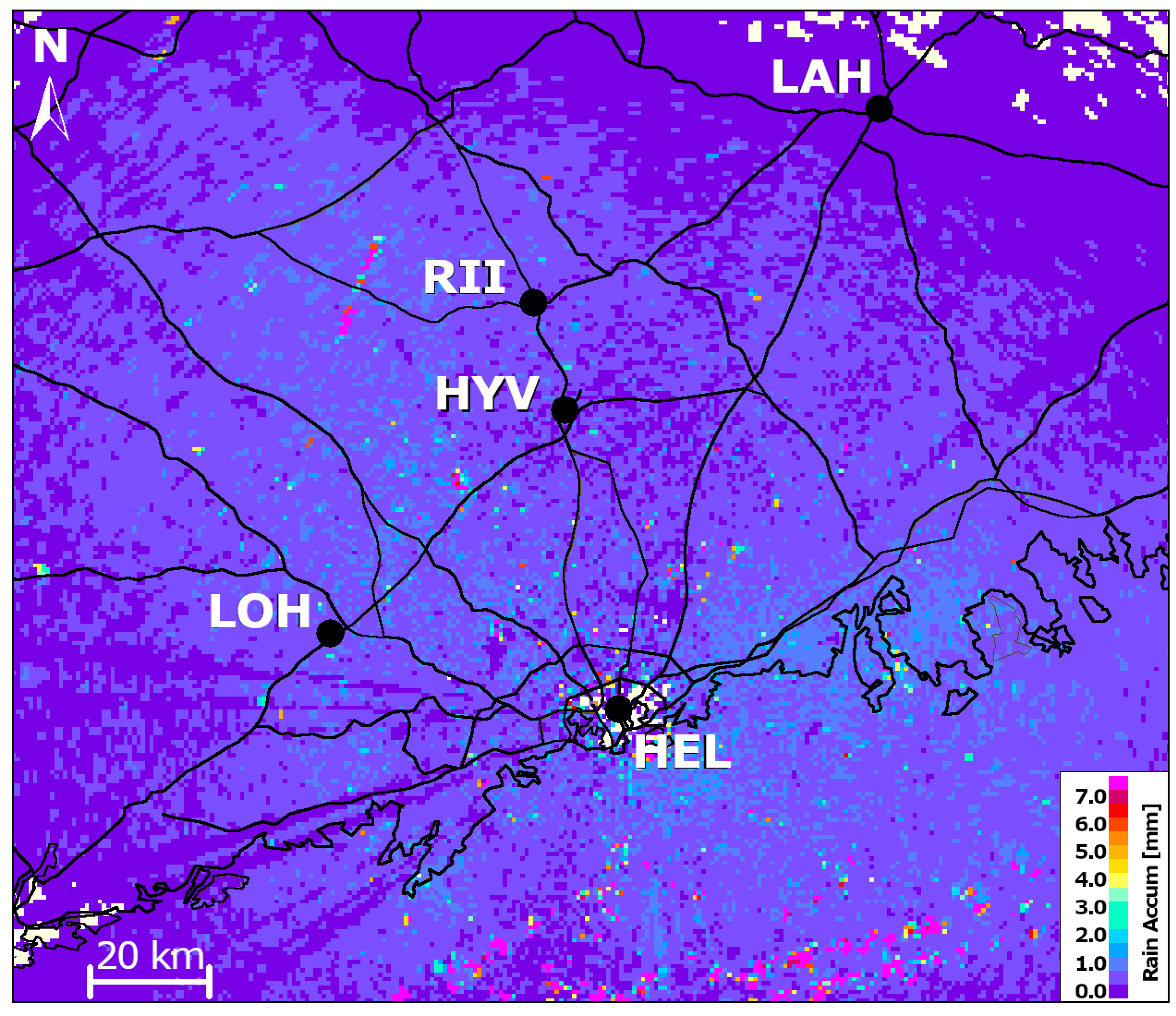
2.3. Nocturnal Light Pollution
3. Results
3.1. Spatial Patterns
3.2. Velocity Patterns and Flight Directions
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alerstam, T. Bird Migration; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Richardson, W.J. Timing of bird migration in relation to weather: Updated review. In Bird Migration: Physiology and Ecophysiology; Gwinner, E., Ed.; Springer: Berlin/Heidelberg, Germany, 1990; pp. 78–101. [Google Scholar]
- Panuccio, M.; Dell’Omo, G.; Bogliani, G.; Catoni, C.; Sapir, N. Migrating birds avoid flying through fog and low clouds. Int. J. Biometeorol. 2019, 63, 231–239. [Google Scholar] [CrossRef] [PubMed]
- Becciu, P.; Panuccio, M.; Dell’Omo, G.; Sapir, N. Groping in the Fog: Soaring Migrants Exhibit Wider Scatter in Flight Directions and Respond Differently to Wind Under Low Visibility Conditions. Front. Ecol. Evol. 2021, 9, 745002. [Google Scholar] [CrossRef]
- Shamoun-Baranes, J.; Liechti, F.; Vansteelant, W.M.G. Atmospheric conditions create freeways, detours and tailbacks for migrating birds. J. Comp. Physiol. A 2017, 203, 509–529. [Google Scholar] [CrossRef] [PubMed]
- Becciu, P.; Menz, M.H.M.; Aurbach, A.; Cabrera-Cruz, S.A.; Wainwright, C.E.; Scacco, M.; Ciach, M.; Pettersson, L.B.; Maggini, I.; Arroyo, G.M.; et al. Environmental effects on flying migrants revealed by radar. Ecography 2019, 42, 942–955. [Google Scholar] [CrossRef] [Green Version]
- Muheim, R.; Sjöberg, S.; Pinzon-Rodriguez, A. Polarized light modulates light-dependent magnetic compass orientation in birds. Proc. Natl. Acad. Sci USA 2016, 113, 1654–1659. [Google Scholar] [CrossRef] [Green Version]
- Newton, I. Weather-related mass-mortality events in migrants. IBIS 2007, 149, 453–467. [Google Scholar] [CrossRef]
- Poot, H.; Ens, B.J.; de Vries, H.; Donners, M.A.H.; Wernand, M.R.; Marquenie, J.M. Green light for nocturnally migrating birds. Ecol. Soc. 2008, 13, 47. Available online: https://www.ecologyandsociety.org/vol13/iss2/art47/ (accessed on 7 March 2022). [CrossRef] [Green Version]
- Marquenie, J.; Donners, M.; Poot, H.; Steckel, W.; de Wit, B. Bird-Friendly Light Sources: Adapting the Spectral Composition of Artificial Lighting. IEEE Ind. Appl. Mag. 2013, 19, 56–62. [Google Scholar] [CrossRef]
- Rebkea, M.; Dierschkeb, V.; Weinera, C.N.; Aumüllera, R.; Hilla, K.; Hilla, R. Attraction of nocturnally migrating birds to artificial light: The influence of colour, intensity and blinking mode under different cloud cover conditions. Biol. Conserv. 2019, 233, 220–227. [Google Scholar] [CrossRef]
- Gauthreaux, S.A.; Belser, C.G. Effects of artificial night lighting on migrating birds. In Ecological Consequences of Artificial Night Lighting; Rich, C., Longcore, T., Eds.; Island Press: London, UK, 2006; pp. 67–93. [Google Scholar]
- Adams, C.A.; Fernández-Juricic, E.; Bayne, E.M.; Cassady, S.; Clair, C. Effects of artificial light on bird movement and distribution: A systematic map. Environ. Evid. 2021, 10, 37. [Google Scholar] [CrossRef]
- Cabrera-Cruz, S.A.; Smolinsky, J.A.; Buler, J.J. Light pollution is greatest within migration passage areas for nocturnally-migrating birds around the world. Sci. Rep. 2018, 8, 3261. [Google Scholar] [CrossRef] [PubMed]
- Cabrera-Cruz, S.A.; Cohen, E.B.; Smolinsky, J.A.; Buler, J.J. Artificial light at night is related to broad-Scale stopover distributions of nocturnally migrating landbirds along the Yucatan Peninsula, Mexico. Remote Sens. 2020, 12, 395. [Google Scholar] [CrossRef] [Green Version]
- Cabrera-Cruz, S.A.; Smolinsky, J.A.; McCarthy, K.P.; Buler, J.J. Urban areas affect flight altitudes of nocturnally migrating birds. J. Anim. Ecol. 2019, 88, 1873–1887. [Google Scholar] [CrossRef] [PubMed]
- La Sorte, F.; Fink, D.; Buler, J.; Farnsworth, A.; Cabrera-Cruz, S.A. Seasonal associations with urban light pollution for nocturnally migrating bird populations. Glob. Change Biol. 2017, 23, 11. [Google Scholar] [CrossRef] [PubMed]
- Van Doren, B.M.; Horton, K.G.; Dokter, A.M.; Klinck, H.; Elbin, S.B.; Farnsworth, A. High-intensity urban light installation dramatically alters nocturnal bird migration. Proc. Natl. Acad. Sci. USA 2017, 114, 11175–11180. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McLaren, J.D.; Buler, J.J.; Schreckengost, T.; Smolinsky, J.A.; Boone, M.; Emiel van Loon, E.; Dawson, D.K.; Walters, E.L. Artificial light at night confounds broad-scale habitat use by migrating birds. Ecol. Lett. 2018, 21, 356–364. [Google Scholar] [CrossRef] [PubMed]
- Gillings, S.; Scott, C. Nocturnal flight calling behaviour of thrushes in relation to artificial light at night. IBIS 2021, 163, 1379–1393. [Google Scholar] [CrossRef]
- Hüppop, O.; Hüppop, K.; Dierschke, J.; Hill, R. Bird collisions at an offshore platform in the North Sea. Bird Study 2016, 63, 73–82. [Google Scholar] [CrossRef]
- Lebbin, D.J.; Harvey, M.G.; Lenz, T.C.; Andersen, M.J.; Ellis, J.M. Nocturnal Migrants Foraging at Night by Artificial Light. Wilson J. Ornithol. 2007, 119, 506–508. [Google Scholar] [CrossRef]
- Leopold, M.F.; Philippart, C.J.M.; Yorio, P. Nocturnal feeding under artificial light conditions by Brown-hooded Gull (Larus maculipennis) in Puerto Madryn harbour (Chubut Province, Argentina). Hornero 2010, 25, 55–60. [Google Scholar]
- Byrkjedal, I.; Lislevand, T.; Vogler, S. Do passerine birds utilise artificial light to prolong their diurnal activity during winter at northern latitudes? Ornis Norvegica 2012, 35, 37–42. [Google Scholar] [CrossRef]
- Leskinen, M.; Markkula, I.; Koistinen, J.; Pylkkö, P.; Ooperi, S.; Siljamo, P.; Ojanen, H.; Raiskio, S.; Tiilikkala, K. Pest insect immigration warning system by an atmospheric dispersion model, weather radars and traps. Appl. Entomol. 2011, 135, 55–67. [Google Scholar] [CrossRef] [Green Version]
- Moisseev, D.; Saltikoff, E.; Leskinen, M. Using dual-polarisation weather radar observations to improve quantitative precipitation estimation in snowfall. In Proceedings of the 8th International Symposium on Troposheric Profiling, Delft, The Netherlands, 19–23 October 2009. [Google Scholar]
- Stepanian, P.M.; Horton, K.G.; Melnikov, V.M.; Zrnić, D.S.; Gauthreaux, S.A., Jr. Dual-polarization radar products for biological applications. Ecosphere 2016, 7, e01539. [Google Scholar] [CrossRef]
- Dokter, A.M.; Holleman, I.; Liechti, F. Bird Detection by Operational Weather Radar; Scientific Report WR 2009-06; KNMI: De Bilt, The Netherlands, 2009; pp. 1–208.
- Doviak, R.J.; Zrnic, D.S. Doppler Radar & Weather Observations; Academic Press Limited: London, UK, 1993. [Google Scholar]
- Koskinen, J.T.; Poutiainen, J.; Schultz, D.M.; Joffre, S.; Koistinen, J.; Saltikoff, E.; Gregow, E.; Turtiainen, H.; Dabberdt, W.F.; Damski, J.; et al. The Helsinki Testbed: A Mesoscale Measurement, Research, and Service Platform. Bull. Am. Meteorol. Soc. 2011, 93, 325–342. [Google Scholar] [CrossRef] [Green Version]
- Franck, A.; Moisseev, D.; Vakkari, V.; Leskinen, M.; Lampilahti, J.; Kerminen, V.-M.; O’Connor, E. Evaluation of convective boundary layer height estimates using radars operating at different frequency bands. Atmos. Meas. Technol. 2021, 14, 7341–7353. [Google Scholar] [CrossRef]
- Weisshaupt, N.; Lehikoinen, A.; Mäkinen, T.; Koistinen, J. Challenges and benefits of using unstructured citizen science data to estimate seasonal timing of bird migration across large scales. PLoS ONE 2021, 16, e0246572. [Google Scholar] [CrossRef] [PubMed]
- Bruderer, B.; Liechti, F. Flight behaviour of nocturnally migrating birds in coastal areas: Crossing or coasting. J. Av. Biol. 1998, 29, 499–507. [Google Scholar] [CrossRef]
- Cochran, W.W.; Graber, R.R. Attraction of nocturnal migrants by lights on a television tower. Wilson Bull. 1958, 70, 378–380. [Google Scholar]
- Bruderer, B.; Peter, D.; Steuri, T. Behaviour of migrating birds exposed to X-band radar and a bright light beam. J. Exp. Biol. 1999, 202, 1015–1022. [Google Scholar] [CrossRef]
- Bruderer, B. Vogelzug: Eine schweizerische Perspektive; Der Ornithologische Beobachter. Beiheft 12; Ala, Schweizerische Gesellschaft für Vogelkunde und Vogelschutz: Rüschlikon, Switzerland, 2017. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date [UTC] | Variable | WNW Sector | NNW Sector-W | NNW Sector-E | NNE Sector | Direction (Degrees) and (Air) Speed [m/s] | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| 280–285° | 285–290° | 330–340° | 340–345° | 345–350° | 350–360° | 20–25° | 25–30° | Wind Birds | ||
| 3 October 2007, 19:28 | ΔVRAD | +3.5 | +2.2 | +0.1 | −3.6 | −1.5 | −0.0 | −1.0 | +0.2 | |
| S.D. of ΔVRAD | 3.1 | 3.4 | 3.4 | 0.0 | 3.6 | 2.4 | 2.9 | 3.5 | 60°; 7 m/s | |
| number of bird bins | 19 | 39 | 8 | 1 | 37 | 39 | 26 | 15 | 30°; 7 m/s | |
| 5 October 2007, 18:58 | ΔVRAD | +4.0 | +3.1 | −1.8 | −3.6 | −2.3 | −1.3 | +1.6 | +5.0 | |
| S.D. of ΔVRAD | 3.7 | 3.6 | 4.0 | 2.9 | 3.6 | 2.5 | 2.5 | 2.1 | 50°; 10 m/s | |
| number of bird bins | 19 | 37 | 44 | 29 | 49 | 31 | 32 | 7 | 40°; 7 m/s | |
| 9 October 2007, 19:28 | ΔVRAD | −1.7 | +0.6 | −0.4 | −0.6 | +0.5 | +2.3 | +2.2 | +1.4 | |
| S.D. of ΔVRAD | 3.2 | 4.4 | 2.4 | 1.8 | 2.2 | 2.2 | 2.1 | 2.8 | 340°; 13 m/s | |
| number of bird bins | 7 | 23 | 57 | 66 | 71 | 73 | 24 | 27 | 50°; 10 m/s | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weisshaupt, N.; Leskinen, M.; Moisseev, D.N.; Koistinen, J. Anthropogenic Illumination as Guiding Light for Nocturnal Bird Migrants Identified by Remote Sensing. Remote Sens. 2022, 14, 1616. https://doi.org/10.3390/rs14071616
Weisshaupt N, Leskinen M, Moisseev DN, Koistinen J. Anthropogenic Illumination as Guiding Light for Nocturnal Bird Migrants Identified by Remote Sensing. Remote Sensing. 2022; 14(7):1616. https://doi.org/10.3390/rs14071616
Chicago/Turabian StyleWeisshaupt, Nadja, Matti Leskinen, Dmitri N. Moisseev, and Jarmo Koistinen. 2022. "Anthropogenic Illumination as Guiding Light for Nocturnal Bird Migrants Identified by Remote Sensing" Remote Sensing 14, no. 7: 1616. https://doi.org/10.3390/rs14071616