2.2. Data Preprocessing
The data preprocessing steps include radiometric calibration, speckle noise removal, gray value normalization, pseudocolor data synthesis, and training data generation. The first four steps constitute the fundamental processing requirements when using SAR data in our experiments. The formula for the Gaofen-3 radiometric calibration can be found in the Gaofen-3 user manual and is as follows:
where
is the calibrated gray value (in decibels),
is the gray value at each pixel of the magnitude image, m is taken as 32,767, and
is the calibration constant.
(qualified value) and
can be found in the description file downloaded with the Gaofen-3 data. Since there are points with zero gray value in the original image, the direct use of the original data for radiometric calibration will produce more obvious speckle noise in the output image, which will have to be removed by complex filtering later. Therefore, before radiation calibration, the pixels whose gray value is zero in the image are uniformly set to the minimum value of the pixel value other than zero in the image.
The intensity of the backscattering coefficients from water and ice surfaces is greatly affected by the incidence angle of images [
31,
32]. The incidence angle variation range of SAR images in scanning mode is generally a few tens of degrees, so incidence angle correction should be performed before classification [
10,
19,
22]. In this paper, Gaofen-3 FSII data are used, whose incidence angle is roughly 31–43° and incidence angle variation range is 7–9°. To find out whether the correction of the incidence angle is needed, we calculate the relationship between the angle of incidence and the intensity of the backscattering coefficient for the selected samples. As a result, we find that there is no clear correlation between the backscattering coefficients and the incident angle of the samples. Considering that the variation of the backscattering coefficients of the selected samples at the same incident angle is relatively large, if we use a linear fitting method to correct the incident angle of the images, it will introduce a large error. Therefore, this paper does not correct the images for the incident angle.
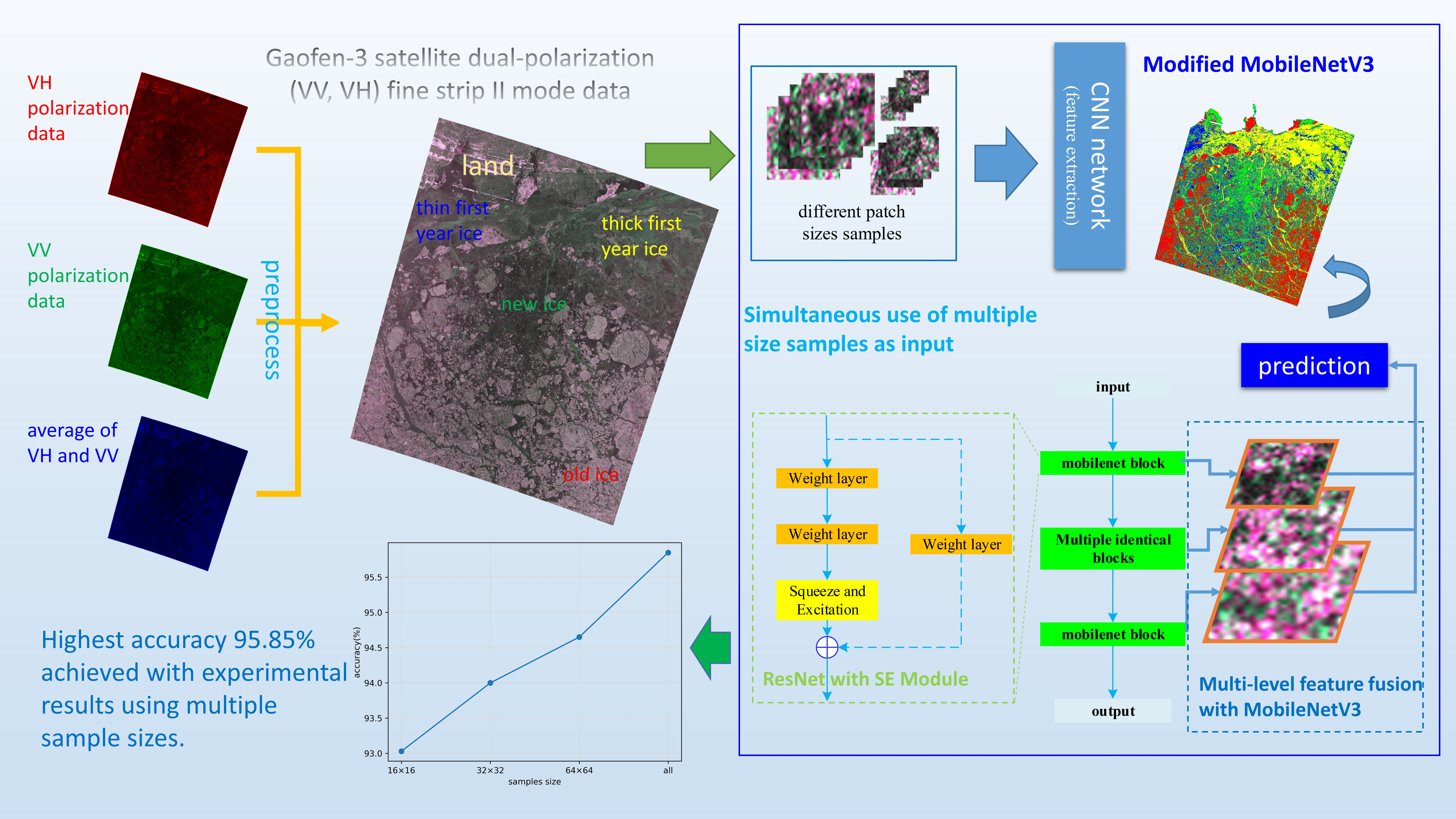
A median filter algorithm is adopted to eliminate the effect of speckle noise, and the window size can be selected as 5 × 5. Next, dual-polarization images are synthesized into pseudocolor images using VH polarization data for the R channel, VV polarization data for the G channel, and the average of VH polarization and VV polarization data for the B channel. In the process of synthesis, the SAR image gray values are unevenly distributed, mostly concentrated in the interval of lower values, which makes the entire image darker. Therefore, in this process, the gray value of the original image is first readjusted. The adjustment strategy is to set the largest 1% of the data in the image to 65,535 and then linearly stretch the remaining 99% of the data to the interval from 0 to 65,535. The pseudocolor image is shown in
Figure 2.
The ground truths are the most authoritative reference when labeling samples. However, there is almost no pixel-level sea ice product. Most of the sources of sea ice live charts come from visual interpretation [
33] or expert systems [
34]. Expert systems are generally used by specialized agencies and are usually not available to the public, so visual interpretation is used for the production of training data. The reference data for visual interpretation are the weekly ice charts published by CIS. The ice charts are divided into sea ice types for each region, and the ice is coded in the form of an egg code for the sea ice type. The egg code is an oval symbol based on the WMO standard, reflecting the density, stage of development (SoD), and size of the ice. For more information about the egg code, please refer to the CIS website (
http://ice.glaces.ec.gc.ca/, accessed on 9 November 2021).
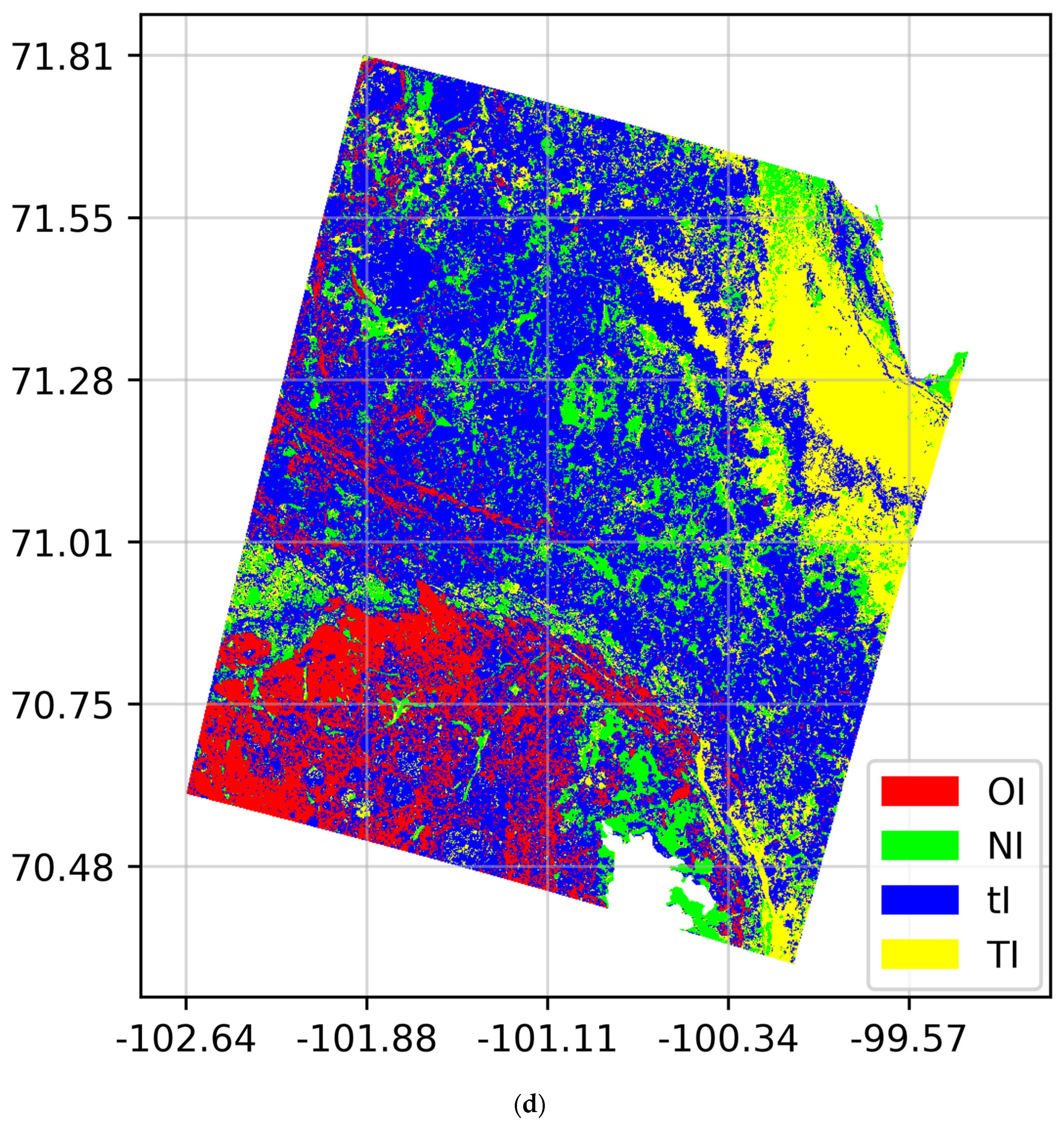
Taking scene 19 in
Table 1 as an example, the process of producing the training data is as follows: According to the ice chart product released by CIS on 24 February 2020, it can be seen that the sea ice types in the region are roughly divided into three types. The sea ice type code (SoD) corresponding to the area labeled A is 7, which corresponds to the sea ice type old ice (OI). Area G has SoD codes of 7 and 4 which indicate that this area consists of two types of sea ice, with thin first-year ice (tI) numbered 7 being the dominant one. Area B with SoD code 4 corresponds to the sea ice type thick first-year ice (TI). In addition, there are a few darker areas in the images that do not belong to the above three types. In the SAR images we collected, such areas are mostly distributed along the shore or in the crevices of other types of ice. Although this type of ice is not shown on the ice map, a separate type is set up. Since the surface of primordial ice is smoother and the reflection coefficient is lower, it is tentatively considered as new ice (NI) based on its gray value. The distribution of the four types of sea ice on the SAR images is shown in
Figure 3.
After determining the sea ice types and distributions, slices of each sea ice type are generated from pseudocolor images. The coordinates of each slice in the graph are recorded by randomly cropping the sliding windows of different sizes within the corresponding types of sea ice regions simultaneously. Since the randomly obtained slices may contain multiple sea ice types at the same time, it is necessary to retain the slices that can be used for the training set by manual selection. The slices are then cropped to sizes of 16 × 16 × 3, 32 × 32 × 3, and 64 × 64 × 3, respectively, to obtain the final training data, as shown in
Figure 4. The red border part represents some pixels of the selected slice, the blue part is the center of the sample, and the yellow part is the current whole sample. To avoid an unbalanced sample size image training effect, the number of samples for each type of sea ice should be kept comparable as much as possible. We randomly select the data used to generate the training and test samples from the data in
Table 1, and the ultimate result is scene 2, scene 4, and scene 19 for testing while the rest of the data are for training. Using the method described above, we select 35,000 training samples for each type of sea ice, of which 14% are used for validation. The training dataset is used as the input of the deep learning model so that the model gradually generates model parameters from the training data, and the validation set is used to test the accuracy of the current model continuously to avoid problems such as accuracy degradation due to overfitting.
Additional samples from scene 2, scene 4, and scene 19 are collected for testing the accuracy of the model. The number of test samples selected within each region is roughly in the range of 900–1000, with specific information shown in
Table 2. Considering that the validation set data are continuously used to test the model accuracy during the training process, the model parameters will be adjusted accordingly to the characteristics of the validation set data, resulting in the model definitely having better results on the validation dataset. Therefore, it is more convincing to use the data not used for training to verify the accuracy of the model.
In the prediction of the whole image, the center of the sample is first determined using a sliding window of size 2 × 2 and step size 4. Then, samples of 16 × 16 × 3, 32 × 32 × 3, and 64 × 64 × 3 are cut at the same time with this window as their center. The samples with the same center are input into the model for prediction by treating the whole 64 × 64 range as the same type of sea ice. Since there are a large number of overlapping areas between different samples, the number of times each pixel is predicted as each type of sea ice is counted after the final prediction is completed for all small blocks, and the type corresponding to the maximum value is taken as the type of sea ice for that pixel.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}