
Comparative Assessment of Pixel and Object-Based Approaches for Mapping of Olive Tree Crowns Based on UAV Multispectral Imagery

 ,
,  ,
,  ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction and Background
2. Materials and Methods
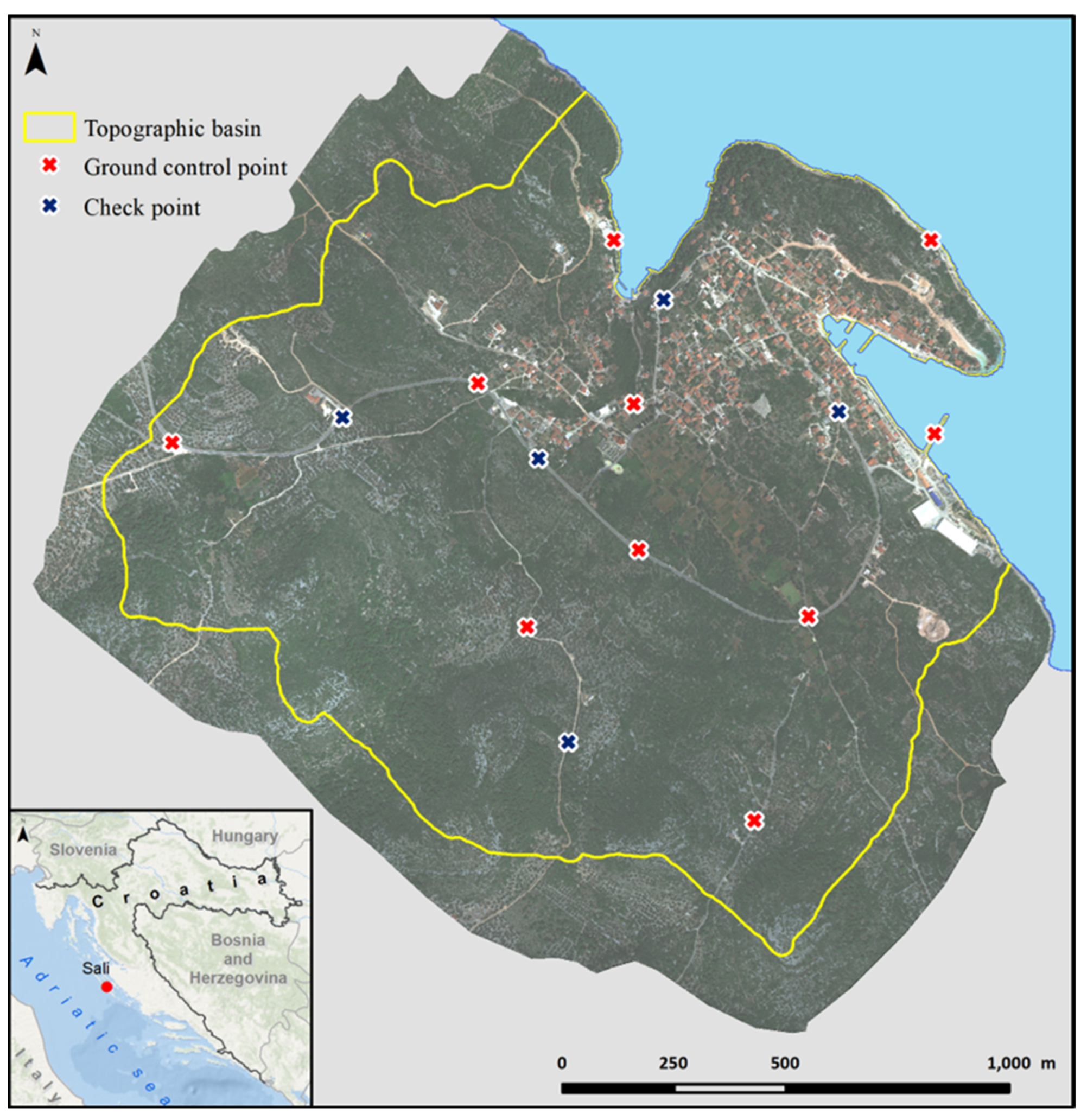
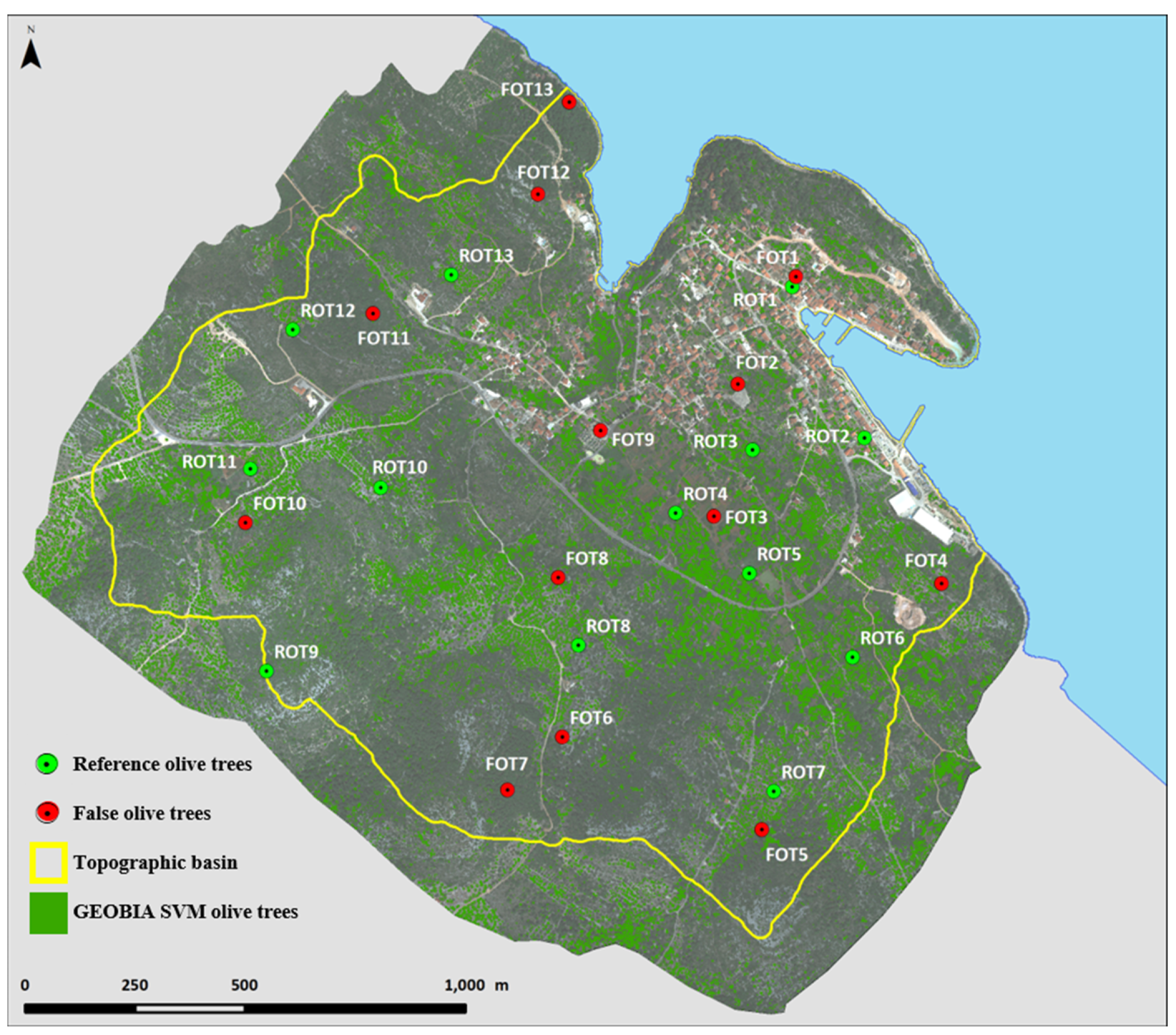
2.1. Study Area
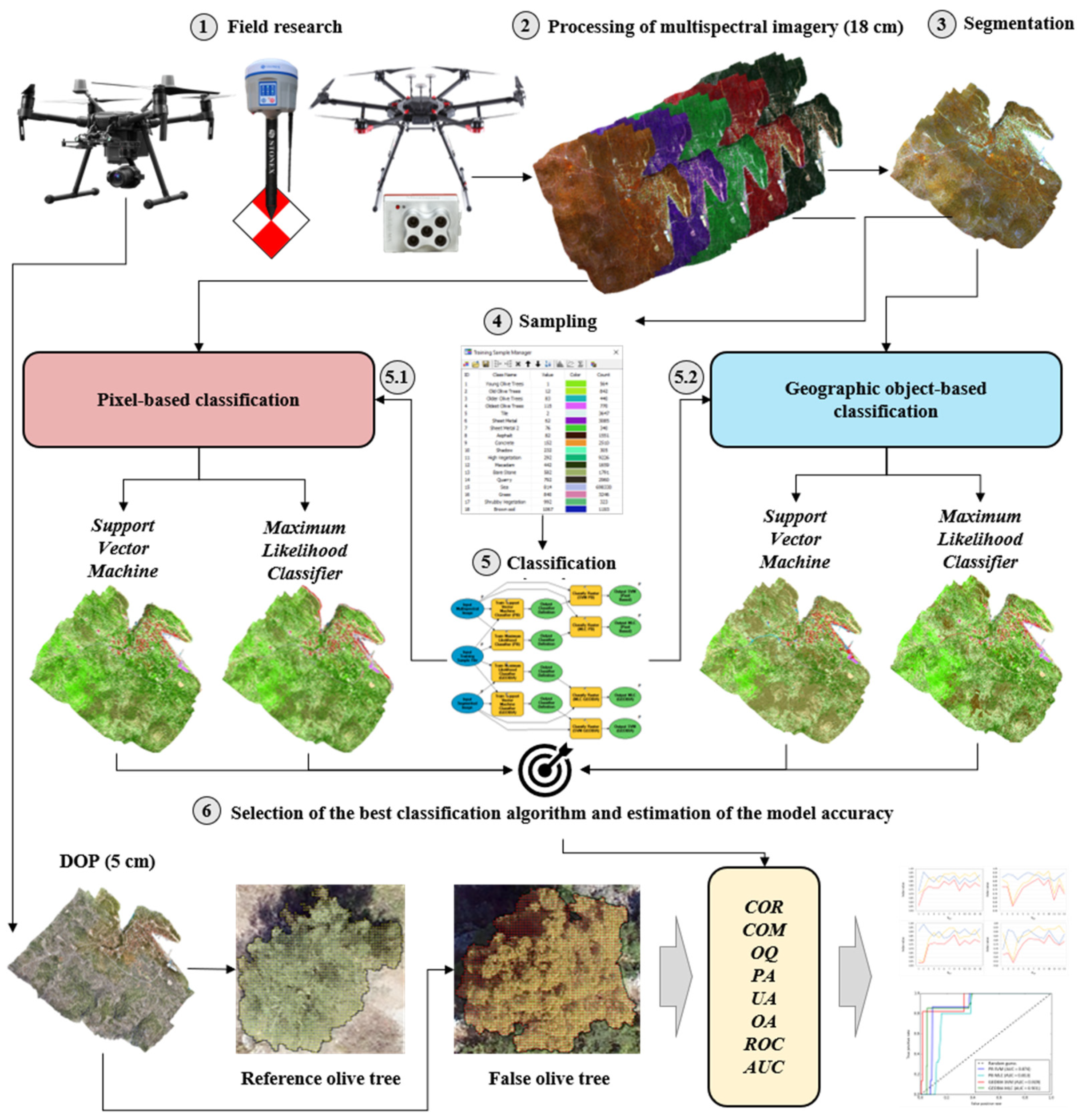
2.2. The Methodological Framework of the Research
2.3. Field Research
2.3.1. Data Acquisition
2.4. UAV Imagery Processing
2.5. Segmentation
2.6. Adding Test Samples
2.7. Classification
2.8. Accuracy Assessment
3. Results and Discussion
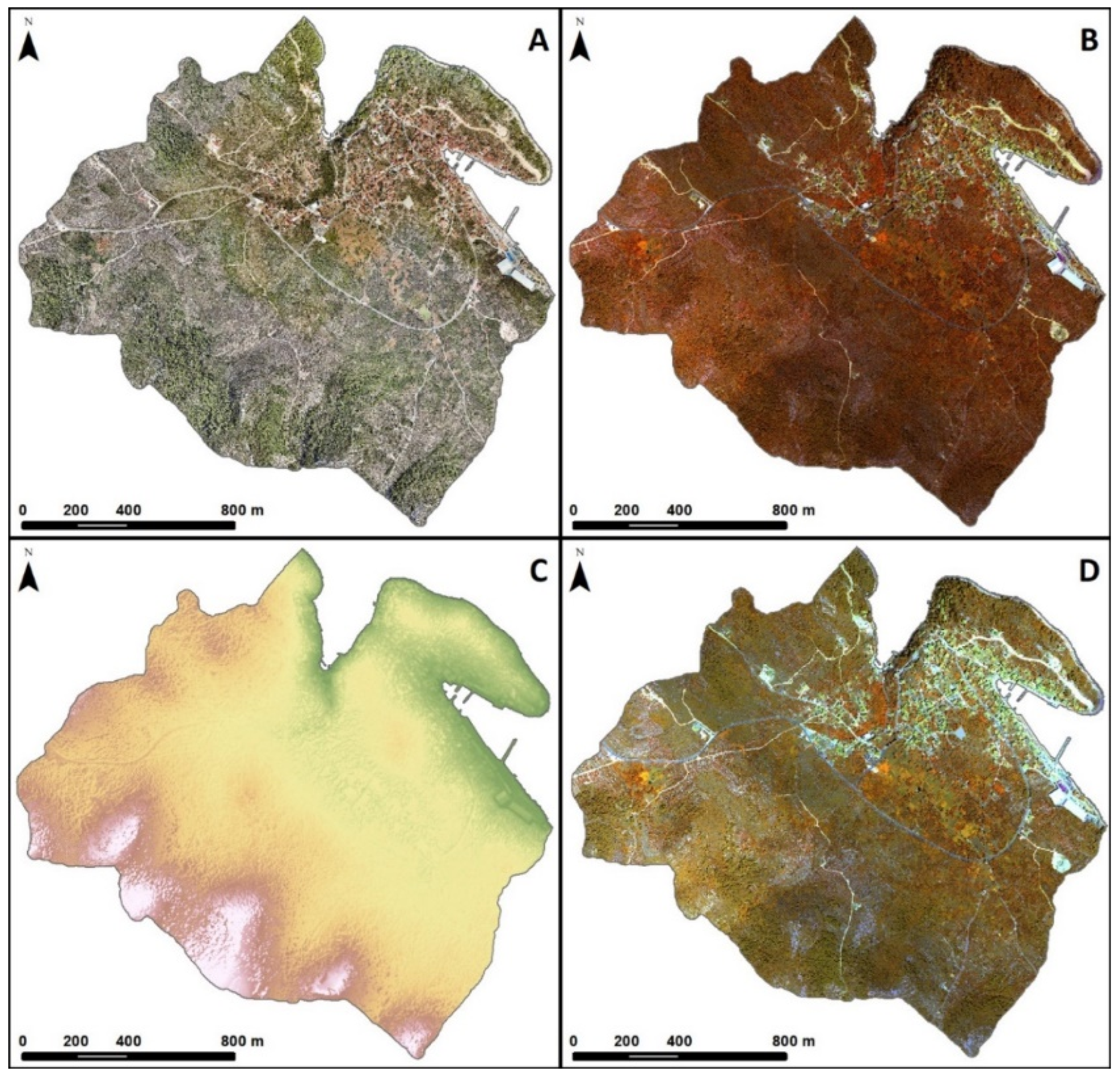
3.1. Derivation of DSM and DOP
3.2. Derivation of UAVMS
3.3. Segmentation
3.4. Adding Test Samples
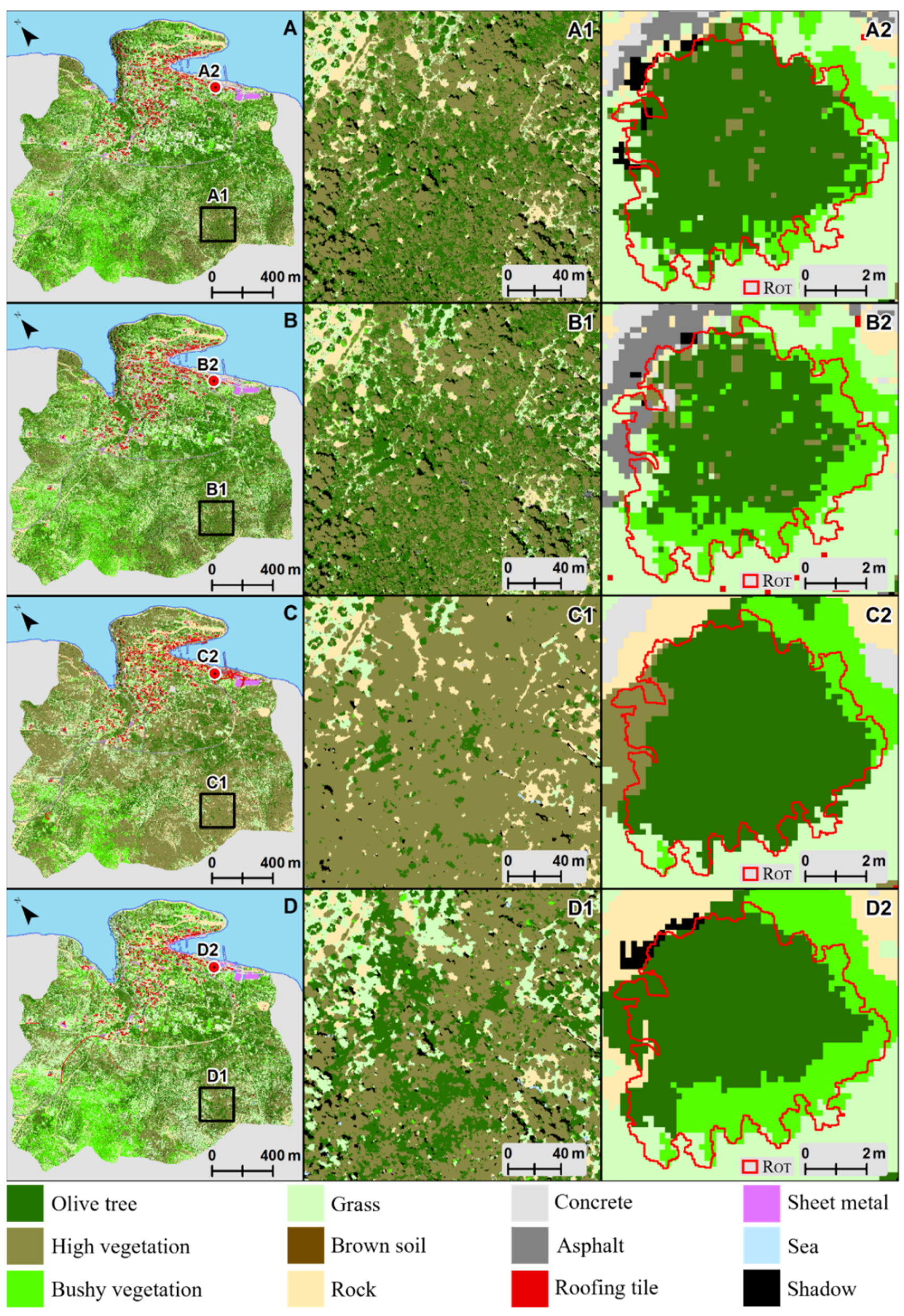
3.5. Results of Classification Algorithms
3.6. Accuracy of Classification Algorithms
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Loumou, A.; Giourga, C. Olive groves: The life and identity of the Mediterranean. Agric. Hum. Values 2003, 201, 87–95. [Google Scholar]
- Tasić, N. Flora Mediterana sa Osvrtom na Maslinu. Master’s Thesis, Fakultet za Mediteranske Poslovne Studije, Tivat, Montenegro, 2015. [Google Scholar]
- Orlandi, F.; Aguilera, F.; Galan, C.; Msallem, M.; Fornaciari, M. Olive yields forecasts and oil price trends in Mediterranean areas: A comprehensive analysis of the last two decades. Exp. Agric. 2017, 53, 71–83. [Google Scholar] [CrossRef]
- Michalopoulos, G.; Kasapi, K.A.; Koubouris, G.; Psarras, G.; Arampatzis, G.; Hatzigiannakis, E.; Kokkinos, G. Adaptation of Mediterranean olive groves to climate change through sustainable cultivation practices. Climate 2020, 8, 54. [Google Scholar] [CrossRef] [Green Version]
- Gomez, J.A.; Amato, M.; Celano, G.; Koubouris, G.C. Organic olive orchards on sloping land: More than a specialty niche production system? J. Environ. Manag. 2008, 89, 99–109. [Google Scholar] [CrossRef] [PubMed]
- Di Fazio, S.; Modica, G. Historic rural landscapes: Sustainable planning strategies and action criteria. The Italian experience in the global and European context. Sustainability 2018, 10, 3834. [Google Scholar] [CrossRef] [Green Version]
- Hernández-Mogollón, J.M.; Di-Clemente, E.; Folgado-Fernández, J.A.; Campón-Cerro, A.M. Olive oil tourism: State of the art. Tour. Hosp. Manag. 2019, 25, 179–207. [Google Scholar] [CrossRef]
- Jurišić, M.; Šumanovac, L.; Zimmer, D.; Barač, Ž. Tehnički i tehnološki aspekti pri zaštiti bilja u sustavu precizne poljoprivrede. Poljoprivreda 2015, 21, 75–81. [Google Scholar] [CrossRef]
- Solano, F.; Di Fazio, S.; Modica, G. A methodology based on GEOBIA and WorldView-3 imagery to derive vegetation indices at tree crown detail in olive orchards. Int. J. Appl. Earth Obs. Geoinf. 2019, 83, 101912. [Google Scholar] [CrossRef]
- Nolè, G.; Pilogallo, A.; Lanortea, F.; De Santisa, F. Remote Sensing Techniques in Olive-Growing: A Review. Curr. Inves. Agri. Curr. Res. 2018, 2, 205–208. [Google Scholar] [CrossRef]
- Mitran, T.; Meena, R.S.; Chakraborty, A. Geospatial Technologies for Crops and Soils: An Overview. Geospat. Technol. Crops Soils 2021, 1–48. [Google Scholar] [CrossRef]
- Minařík, R.; Langhammer, J. Use of a multispectral UAV photogrammetry for detection and tracking of forest disturbance dynamics. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41. [Google Scholar] [CrossRef]
- Domazetović, F.; Šiljeg, A.; Marić, I.; Jurišić, M. Assessing the Vertical Accuracy of Worldview-3 Stereo-extracted Digital Surface Model over Olive Groves. GISTAM 2020, 246, 253. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-Based Photogrammetry and Hyperspectral Imaging for Mapping Bark Beetle Damage at Tree-Level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef] [Green Version]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar] [CrossRef]
- Gao, Y.; Mas, J.F. A Comparison of the Performance of Pixel Based and Object Based Classifications over Images with Various Spatial Resolutions. Online J. Earth Sci. 2008, 2, 27–35. [Google Scholar]
- Weih, R.C.; Riggan, N.D. Object-based classification vs. pixel-based classification: Comparative importance of multi-resolution imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, C7. [Google Scholar]
- Comaniciu, D.; Meer, P. Mean shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef] [Green Version]
- Abburu, S.; Golla, S.B. Satellite image classification methods and techniques: A review. Int. J. Comput. Appl. 2015, 119. [Google Scholar] [CrossRef]
- Fan, R.; Hou, B.; Liu, J.; Yang, J.; Hong, Z. Registration of Multiresolution Remote Sensing Images Based on L2-Siamese Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 237–248. [Google Scholar] [CrossRef]
- Wang, P.; Wang, L.; Leung, H.; Zhang, G. Super-Resolution Mapping Based on Spatial–Spectral Correlation for Spectral Imagery. IEEE Trans. Geosci. Remote Sens. 2020, 59, 2256–2268. [Google Scholar] [CrossRef]
- Wang, P.; Yao, H.; Li, C.; Zhang, G.; Leung, H. Multiresolution Analysis Based on Dual-Scale Regression for Pansharpening. IEEE Trans. Geosci. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Gašparović, M.; Zrinjski, M.; Gudelj, M. Automatic cost-effective method for land cover classification (ALCC). Comput. Environ. Urban. Syst. 2019, 76, 1–10. [Google Scholar] [CrossRef]
- Modica, G.; Messina, G.; De Luca, G.; Fiozzo, V.; Praticò, S. Monitoring the vegetation vigor in heterogeneous citrus and olive orchards. A multiscale object-based approach to extract ‘trees’ crowns from UAV multispectral imagery. Comput. Electron. Agric. 2020, 175, 105500. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; de Castro, A.I.; Pena, J.M.; Jimenez-Brenes, F.M.; Arquero, O.; Lovera, M.; Lopez-Granados, F. Mapping the 3D structure of almond trees using UAV acquired photogrammetric point clouds and object-based image analysis. Biosyst. Eng. 2018, 176, 172–184. [Google Scholar] [CrossRef]
- Karydas, C.; Gewehr, S.; Iatrou, M.; Iatrou, G.; Mourelatos, S. Olive plantation mapping on a sub-tree scale with object-based image analysis of multispectral UAV data; Operational potential in tree stress monitoring. J. Imaging 2017, 3, 57. [Google Scholar] [CrossRef] [Green Version]
- Stateras, D.; Kalivas, D. Assessment of Olive Tree Canopy Characteristics and Yield Forecast Model Using High Resolution UAV Imagery. Agriculture 2020, 10, 385. [Google Scholar] [CrossRef]
- Díaz-Varela, R.A.; De la Rosa, R.; León, L.; Zarco-Tejada, P.J. High-resolution airborne UAV imagery to assess olive tree crown parameters using 3D photo reconstruction: Application in breeding trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef] [Green Version]
- Immitzer, M.; Atzberger, C.; Koukal, T. Tree species classification with random forest using very high spatial resolution 8-band WorldView-2 satellite data. Remote Sens. 2012, 4, 2661–2693. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Abd-Elrahman, A.; Morton, J.; Wilhelm, V.L. Comparing fully convolutional networks, random forest, support vector machine, and patch-based deep convolutional neural networks for object-based wetland mapping using images from small unmanned aircraft system. GIScience Remote Sens. 2018, 55, 243–264. [Google Scholar] [CrossRef]
- Castrignanò, A.; Belmonte, A.; Antelmi, I.; Quarto, R.; Quarto, F.; Shaddad, S.; Nigro, F. Semi-automatic method for early detection of Xylella fastidiosa in olive trees using UAV multispectral imagery and geostatistical-discriminant analysis. Remote Sens. 2021, 13, 14. [Google Scholar] [CrossRef]
- Story, M.; Congalton, R.G. Accuracy assessment: A ‘user’s perspective. Photogramm. Eng. Remote Sens. 1986, 52, 397–399. [Google Scholar]
- Panđa, L.; Šiljeg, A.; Marić, I.; Domazetović, F.; Šiljeg, S.; Milošević, R. Usporedba GEOBIA klasifikacijskih algoritama na temelju Worldview-3 snimaka u izdvajanju šuma primorskih četinjača. Šumarski List 2021, 145, 535–544. [Google Scholar] [CrossRef]
- Cai, L.; Shi, W.; Miao, Z.; Hao, M. Accuracy assessment measures for object extraction from remote sensing images. Remote Sens. 2018, 10, 303. [Google Scholar] [CrossRef] [Green Version]
- Otukei, J.R.; Blaschke, T. Land cover change assessment using decision trees, support vector machines and maximum likelihood classification algorithms. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, 27–31. [Google Scholar] [CrossRef]
- Mondal, A.; Kundu, S.; Chandniha, S.K.; Shukla, R.; Mishra, P.K. Comparison of support vector machine and maximum likelihood classification technique using satellite imagery. Int. J. Remote Sens. GIS 2012, 1, 116–123. [Google Scholar]
- Nitze, I.; Schulthess, U.; Asche, H. Comparison of machine learning algorithms random forest, artificial neural network and support vector machine to maximum likelihood for supervised crop type classification. In Proceedings of the 4th GEOBIA, Rio de Janeiro, Brazil, 7–9 May 2012. [Google Scholar]
- Karan, S.K.; Samadder, S.R. Accuracy of land use change detection using support vector machine and maximum likelihood techniques for open-cast coal mining areas. Environ. Monit. Assess. 2016, 188, 486. [Google Scholar] [CrossRef] [PubMed]
- Javna Ustanova “Natura Jadera”. Available online: https://natura-jadera.com/prirodne-vrijednosti/posebni-rezervati/maslinik-saljsko-polje/ (accessed on 20 September 2021).
- Peña-Barragán, J.M.; Jurado-Expósito, M.; López-Granados, F.; Atenciano, S.; Sánchez-De la Orden, M.; Garcıa-Ferrer, A.; Garcıa-Torres, L. Assessing land-use in olive groves from aerial photographs. Agric. Ecosyst. Environ. 2004, 103, 117–122. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Wang, R.; Li, L.; Xiao, Z. A workflow of SfM-based digital outcrop reconstruction using Agisoft PhotoScan. In Proceedings of the 2019 IEEE 4th International Conference on Image, Vision and Computing (ICIVC), Xiamen, China, 5–7 July 2019; pp. 711–715. [Google Scholar]
- Kingsland, K. Comparative analysis of digital photogrammetry software for cultural heritage. Digit. Appl. Archaeol. Cult. Herit. 2020, 18, e00157. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Arza-García, M.; Gil-Docampo, M.; Ortiz-Sanz, J. A hybrid photogrammetry approach for archaeological sites: Block alignment issues in a case study (the Roman camp of A Cidadela). J. Cult. Herit. 2019, 38, 195–203. [Google Scholar] [CrossRef]
- Pena-Villasenin, S.; Gil-Docampo, M.; Ortiz-Sanz, J. Desktop vs cloud computing software for 3D measurement of building façades: The monastery of San Martín Pinario. Measurement 2020, 149, 106984. [Google Scholar] [CrossRef]
- Eisank, C.; Smith, M.; Hillier, J. Assessment of multiresolution segmentation for delimiting drumlins in digital elevation models. Geomorphology 2014, 214, 452–464. [Google Scholar] [CrossRef] [Green Version]
- Whiteside, T.G.; Maier, S.W.; Boggs, G.S. Area-based and location-based validation of classified image objects. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 117–130. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Liu, C.; Frazier, P.; Kumar, L. Comparative assessment of the measures of thematic classification accuracy. Remote Sens. Environ. 2007, 107, 606–616. [Google Scholar] [CrossRef]
- Bradley, A.P. The use of the area under the ROC curve in the evaluation of machine learning algorithms. Pattern Recognit. 1997, 30, 1145–1159. [Google Scholar] [CrossRef] [Green Version]
- Mas, J.F.; Soares Filho, B.; Pontius, R.G.; Farfán Gutiérrez, M.; Rodrigues, H. A suite of tools for ROC analysis of spatial models. ISPRS Int. J. Geo Inf. 2013, 2, 869–887. [Google Scholar] [CrossRef]
- Arabameri, A.; Chen, W.; Loche, M.; Zhao, X.; Li, Y.; Lombardo, L.; Bui, D.T. Comparison of machine learning models for gully erosion susceptibility mapping. Geosci. Front. 2020, 11, 1609–1620. [Google Scholar] [CrossRef]
- Tharwat, A. Classification assessment methods. Appl. Comput. Inf. 2020. [Google Scholar] [CrossRef]
- Rahmati, O.; Tahmasebipour, N.; Haghizadeh, A.; Pourghasemi, H.R.; Feizizadeh, B. Evaluating the influence of geo-environmental factors on gully erosion in a semi-arid region of Iran: An integrated framework. Sci. Total Environ. 2017, 579, 913–927. [Google Scholar] [CrossRef]
- Arabameri, A.; Rezaei, K.; Pourghasemi, H.R.; Lee, S.; Yamani, M. GIS-based gully erosion susceptibility mapping: A comparison among three data-driven models and AHP knowledge-based technique. Environ. Earth Sci. 2018, 77, 628. [Google Scholar] [CrossRef]
- Momeni, R.; Aplin, P.; Boyd, D.S. Mapping complex urban land cover from spaceborne imagery: The influence of spatial resolution, spectral band set and classification approach. Remote Sens. 2016, 8, 88. [Google Scholar] [CrossRef] [Green Version]
- Fu, H.; Zhou, T.; Sun, C. Object-based shadow index via illumination intensity from high resolution satellite images over urban areas. Sensors 2020, 20, 1077. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cetinkaya, H.; Kulak, M. Relationship between total phenolic, total flavonoid and oleuropein in different aged olive (Olea europaea L.) Cultivar leaves. Afr. J. Tradit. Complementary Altern. Med. 2016, 13, 81–85. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
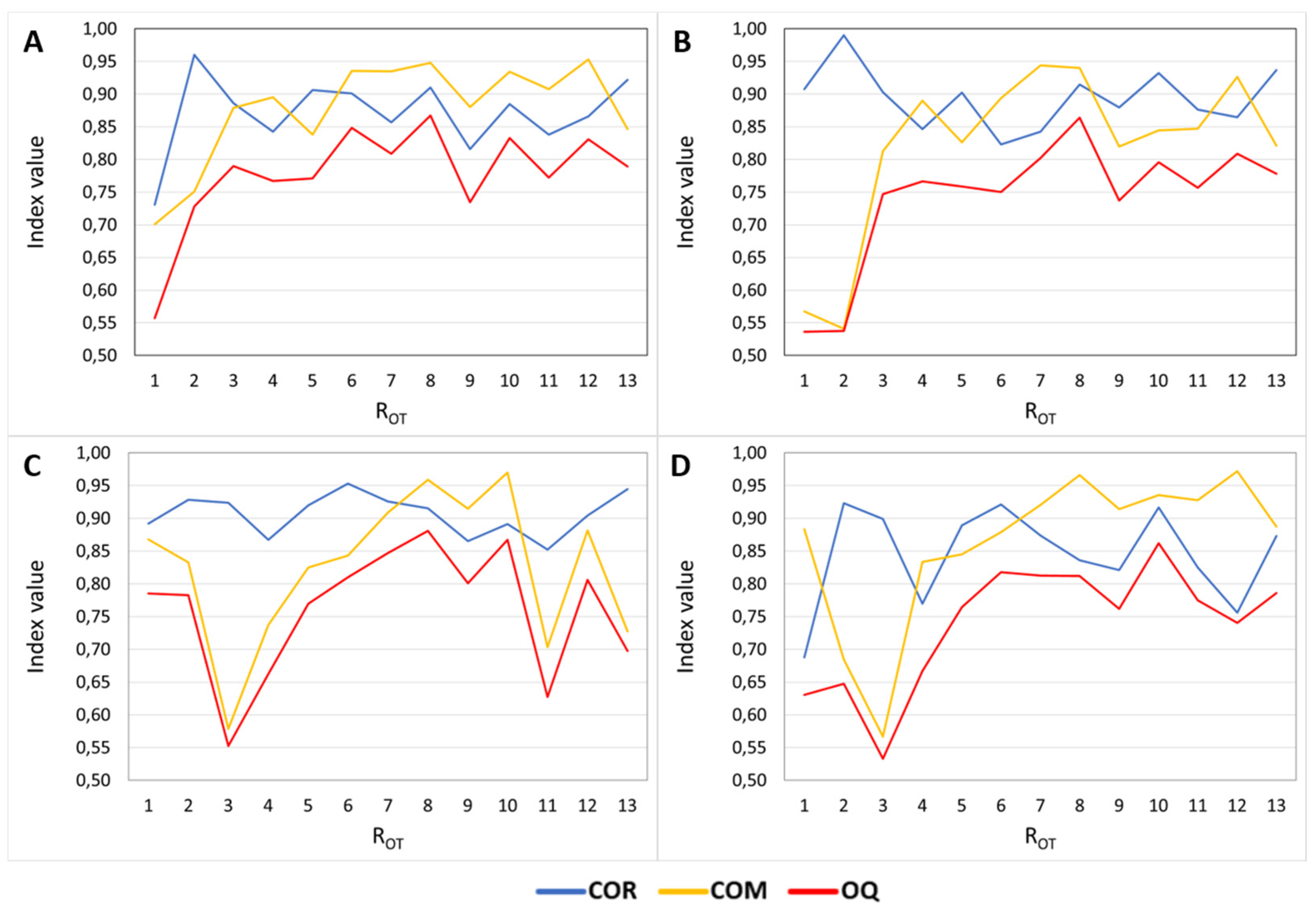
| A | Test Area | COR PB-SVM | COM PB-SVM | OQ PB-SVM | B | Test Area | COR PB-MLC | COM PB-MLC | OQ PB-MLC |
| FOT1 | 0.0337 | 0.9868 | 0.0337 | FOT1 | 0.8858 | 0.3399 | 0.3257 | ||
| FOT2 | 0.3274 | 0.9510 | 0.3219 | FOT2 | 0.8777 | 0.2543 | 0.2456 | ||
| FOT3 | 0.0564 | 0.9912 | 0.0564 | FOT3 | 0.3164 | 0.0075 | 0.0073 | ||
| FOT4 | 0.0527 | 0.9838 | 0.0527 | FOT4 | 0.4259 | 0.0203 | 0.0198 | ||
| FOT5 | 0.0876 | 0.9809 | 0.0875 | FOT5 | 0.8458 | 0.1304 | 0.1274 | ||
| FOT6 | 0.0158 | 0.9911 | 0.0158 | FOT6 | 0.6000 | 0.0126 | 0.0125 | ||
| FOT7 | 0.1362 | 0.9900 | 0.1360 | FOT7 | 0.9134 | 0.1649 | 0.1624 | ||
| FOT8 | 0.0500 | 0.9791 | 0.0500 | FOT8 | 0.2491 | 0.0150 | 0.0143 | ||
| FOT9 | 0.0068 | 0.9983 | 0.0068 | FOT9 | 0.7076 | 0.0057 | 0.0057 | ||
| FOT10 | 0.1948 | 0.9937 | 0.1945 | FOT10 | 0.9185 | 0.1961 | 0.1928 | ||
| FOT11 | 0.0397 | 0.9879 | 0.0397 | FOT11 | 0.3581 | 0.0042 | 0.0041 | ||
| FOT12 | 0.0743 | 0.9824 | 0.0742 | FOT12 | 0.6395 | 0.0771 | 0.0739 | ||
| FOT13 | 0.0347 | 0.9991 | 0.0347 | FOT13 | 0.7583 | 0.0188 | 0.0187 | ||
| Total | 0.7595 | 0.0728 | 0.0712 | Total | 0.6535 | 0.0959 | 0.0931 | ||
| C | Test Area | COR GEOBIA-SVM | COM GEOBIA-SVM | OQ GEOBIA-SVM | D | Test Area | COR GEOBIA-MLC | COM GEOBIA-MLC | OQ GEOBIA-MLC |
| FOT1 | 0.8343 | 0.0196 | 0.0196 | FOT1 | 0.9367 | 0.6308 | 0.605 | ||
| FOT2 | 0.8622 | 0.1161 | 0.114 | FOT2 | 0.8105 | 0.1945 | 0.186 | ||
| FOT3 | 0 | 0 | 0 | FOT3 | 0.0476 | 0.0006 | 0.0006 | ||
| FOT4 | 0 | 0 | 0 | FOT4 | 0.5009 | 0.009 | 0.0089 | ||
| FOT5 | 1.1588 | 0.0005 | 0.0005 | FOT5 | 0.882 | 0.0201 | 0.0201 | ||
| FOT6 | 0.2821 | 0.0005 | 0.0005 | FOT6 | 0.5186 | 0.0016 | 0.0016 | ||
| FOT7 | 0.8524 | 0.0169 | 0.0169 | FOT7 | 0.8818 | 0.0833 | 0.0824 | ||
| FOT8 | 0 | 0 | 0 | FOT8 | 0.3238 | 0.0094 | 0.0092 | ||
| FOT9 | 0 | 0 | 0 | FOT9 | 0.6445 | 0.0018 | 0.0018 | ||
| FOT10 | 0.9445 | 0.0532 | 0.0531 | FOT10 | 0.8923 | 0.1276 | 0.1256 | ||
| FOT11 | 0 | 0 | 0 | FOT11 | 0.3753 | 0.0109 | 0.0107 | ||
| FOT12 | 0 | 0 | 0 | FOT12 | 0.7343 | 0.0073 | 0.0073 | ||
| FOT13 | 0 | 0 | 0 | FOT13 | 0.4043 | 0.0032 | 0.0031 | ||
| Total | 0.3796 | 0.0159 | 0.0157 | Total | 0.6117 | 0.0846 | 0.0817 |
| COR | COM | OQ | |
|---|---|---|---|
| TAPBSVM | 0.111 | 0.804 | 0.705 |
| TAPBMLC | 0.240 | 0.725 | 0.648 |
| TAGEOBIASVM | 0.527 | 0.811 | 0.745 |
| TAGEOBIAMLC | 0.234 | 0.778 | 0.658 |
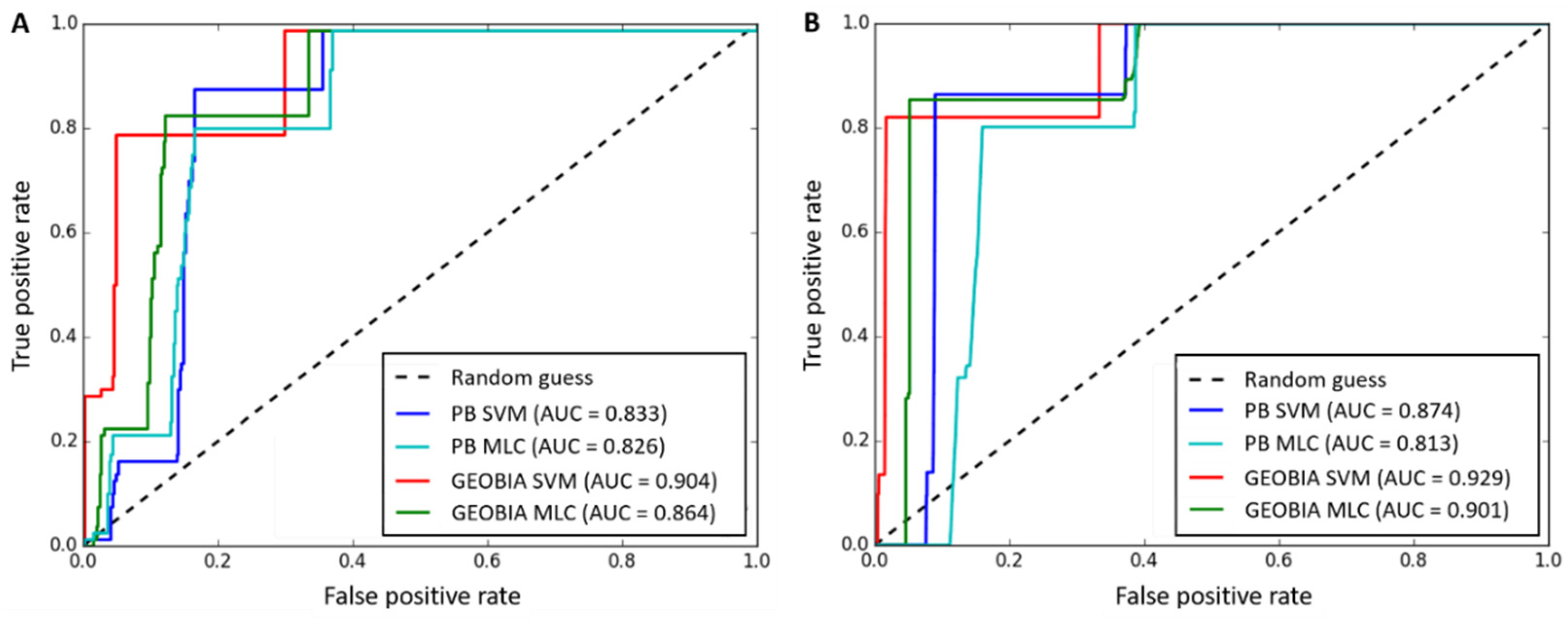
| A | Class Value | Other | Olive Tree | Total | UA | OA | A1 | Class Value | Other | Olive Tree | Total | UA | OA |
| Other | 351 | 10 | 361 | 0.972 | Other | 762662 | 2412 | 765074 | 0.997 | ||||
| Olive tree | 69 | 70 | 139 | 0.504 | Olive tree | 108345 | 15360 | 123705 | 0.124 | ||||
| Total | 420 | 80 | 500 | Total | 871007 | 17772 | 888779 | ||||||
| PA | 0.836 | 0.875 | PA | 0.876 | 0.864 | ||||||||
| OA | 0.842 | OA | 0.875 | ||||||||||
| B | Class Value | Other | Olive Tree | Total | UA | OA | B1 | Class Value | Other | Olive Tree | Total | UA | OA |
| Other | 350 | 16 | 366 | 0.956 | Other | 731779 | 3505 | 735284 | 0.995 | ||||
| Olive tree | 70 | 64 | 134 | 0.478 | Olive tree | 139228 | 14267 | 153495 | 0.093 | ||||
| Total | 420 | 80 | 500 | Total | 871007 | 17772 | 888779 | ||||||
| PA | 0.833 | 0.800 | PA | 0.840 | 0.803 | ||||||||
| OA | 0.828 | OA | 0.839 | ||||||||||
| C | Class Value | Other | Olive Tree | Total | UA | OA | C1 | Class Value | Other | Olive Tree | Total | UA | OA |
| Other | 400 | 17 | 417 | 0.959 | Other | 856246 | 3177 | 859423 | 0.996 | ||||
| Olive tree | 20 | 63 | 83 | 0.759 | Olive tree | 14761 | 14595 | 29356 | 0.497 | ||||
| Total | 420 | 80 | 500 | Total | 871007 | 17772 | 888779 | ||||||
| PA | 0.952 | 0.788 | PA | 0.983 | 0.821 | ||||||||
| OA | 0.926 | OA | 0.980 | ||||||||||
| D | Class Value | Other | Olive Tree | Total | UA | OA | D1 | Class Value | Other | Olive Tree | Total | UA | OA |
| Other | 369 | 14 | 383 | 0.963 | Other | 799475 | 2600 | 802075 | 0.997 | ||||
| Olive tree | 51 | 66 | 117 | 0.564 | Olive tree | 71532 | 15172 | 86704 | 0.175 | ||||
| Total | 420 | 80 | 500 | Total | 871007 | 17772 | 888779 | ||||||
| PA | 0.879 | 0.825 | PA | 0.918 | 0.854 | ||||||||
| OA | 0.870 | OA | 0.917 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Šiljeg, A.; Panđa, L.; Domazetović, F.; Marić, I.; Gašparović, M.; Borisov, M.; Milošević, R. Comparative Assessment of Pixel and Object-Based Approaches for Mapping of Olive Tree Crowns Based on UAV Multispectral Imagery. Remote Sens. 2022, 14, 757. https://doi.org/10.3390/rs14030757
Šiljeg A, Panđa L, Domazetović F, Marić I, Gašparović M, Borisov M, Milošević R. Comparative Assessment of Pixel and Object-Based Approaches for Mapping of Olive Tree Crowns Based on UAV Multispectral Imagery. Remote Sensing. 2022; 14(3):757. https://doi.org/10.3390/rs14030757
Chicago/Turabian StyleŠiljeg, Ante, Lovre Panđa, Fran Domazetović, Ivan Marić, Mateo Gašparović, Mirko Borisov, and Rina Milošević. 2022. "Comparative Assessment of Pixel and Object-Based Approaches for Mapping of Olive Tree Crowns Based on UAV Multispectral Imagery" Remote Sensing 14, no. 3: 757. https://doi.org/10.3390/rs14030757