
A GRU and AKF-Based Hybrid Algorithm for Improving INS/GNSS Navigation Accuracy during GNSS Outage


Abstract
:
1. Introduction
2. Rationale of the Proposed Algorithm
2.1. AI Module Input and Output Parameters
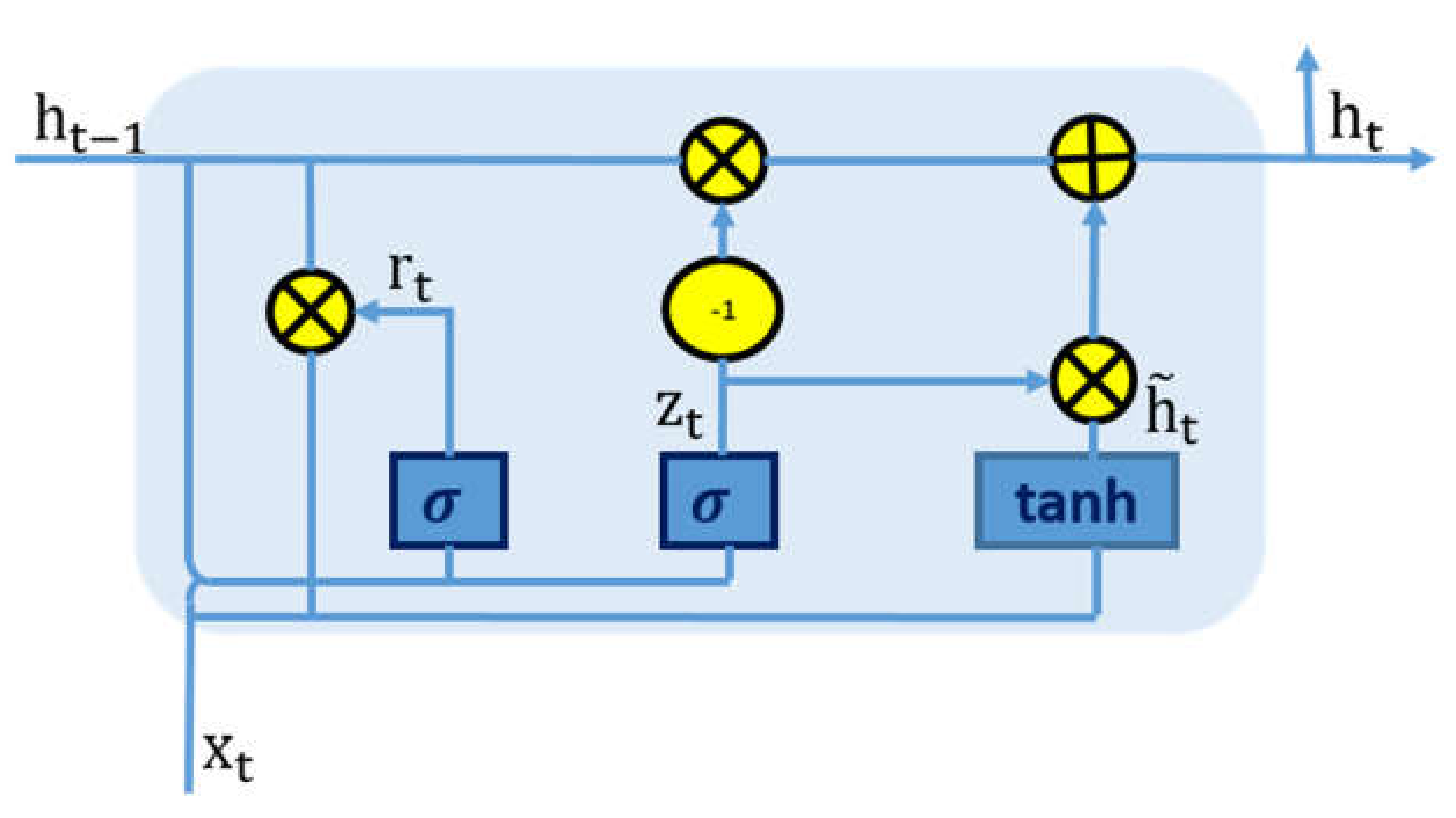
2.2. Neural Network Model: GRU
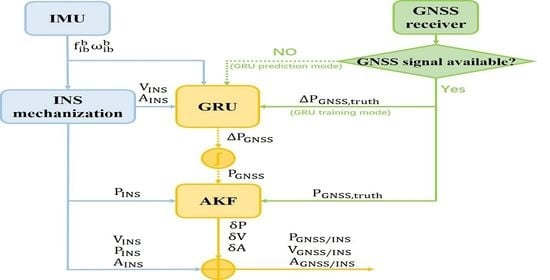
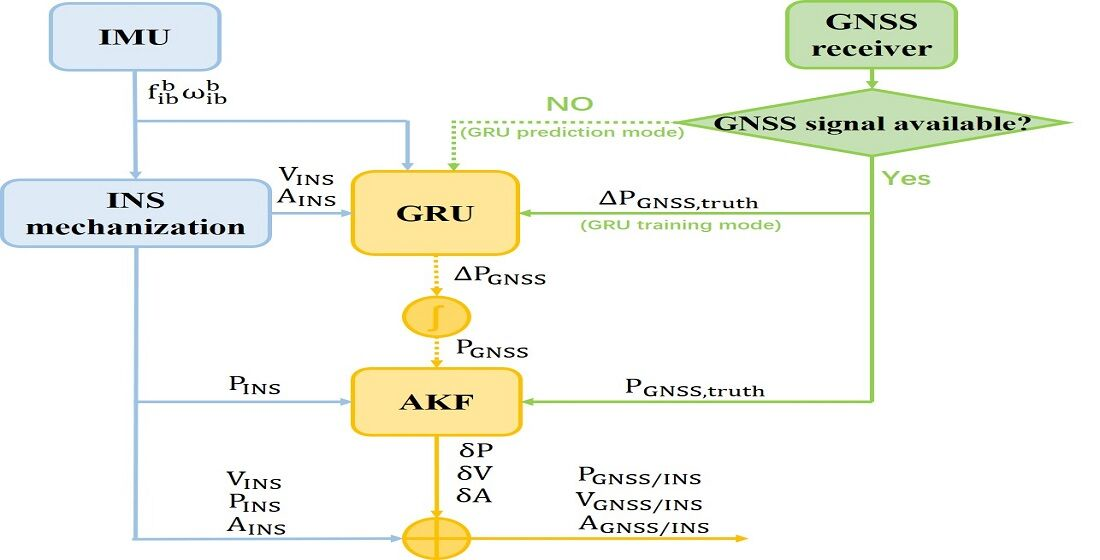
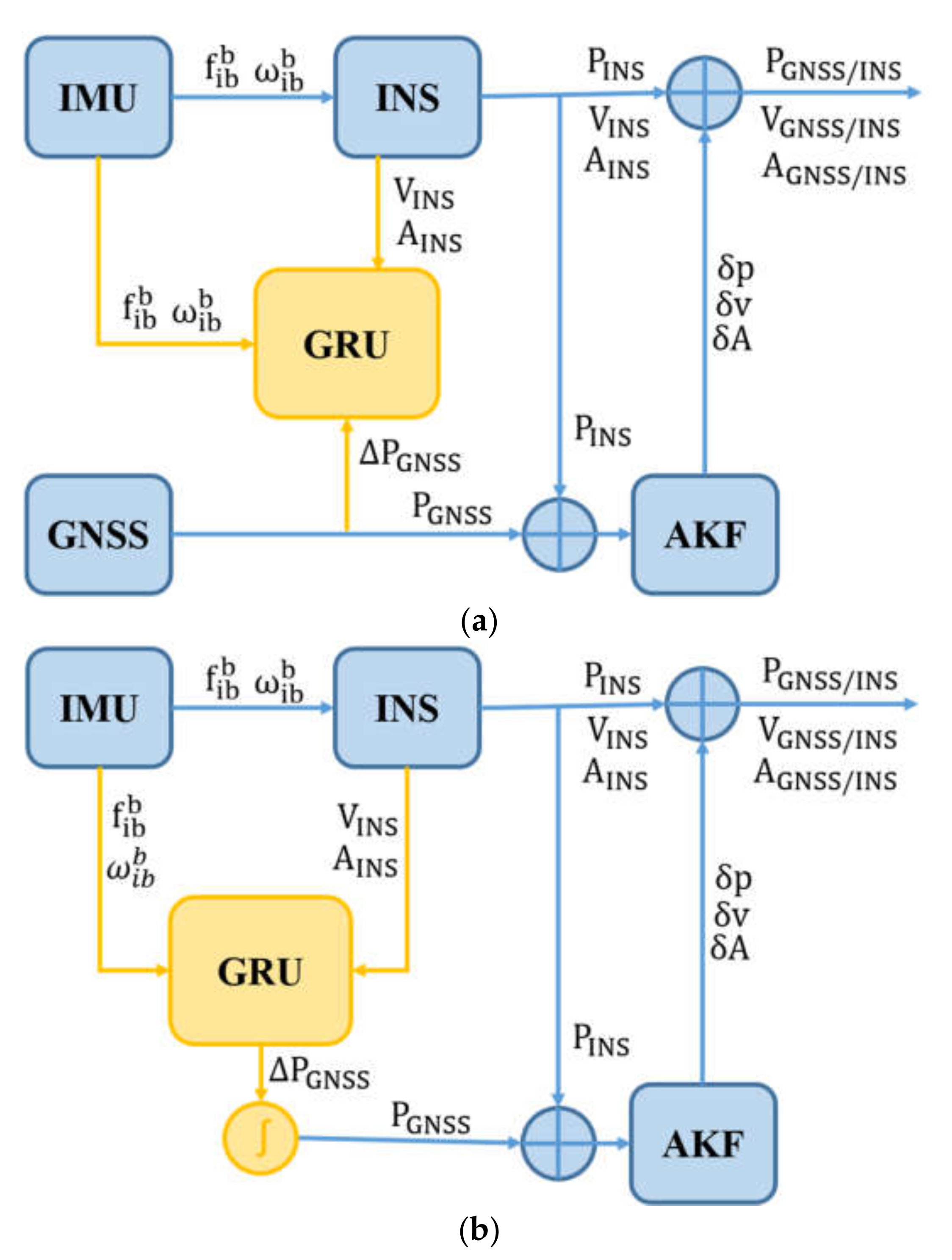
2.3. Proposed GRU-aided AKF Algorithm
3. Implementation of the Proposed Algorithm
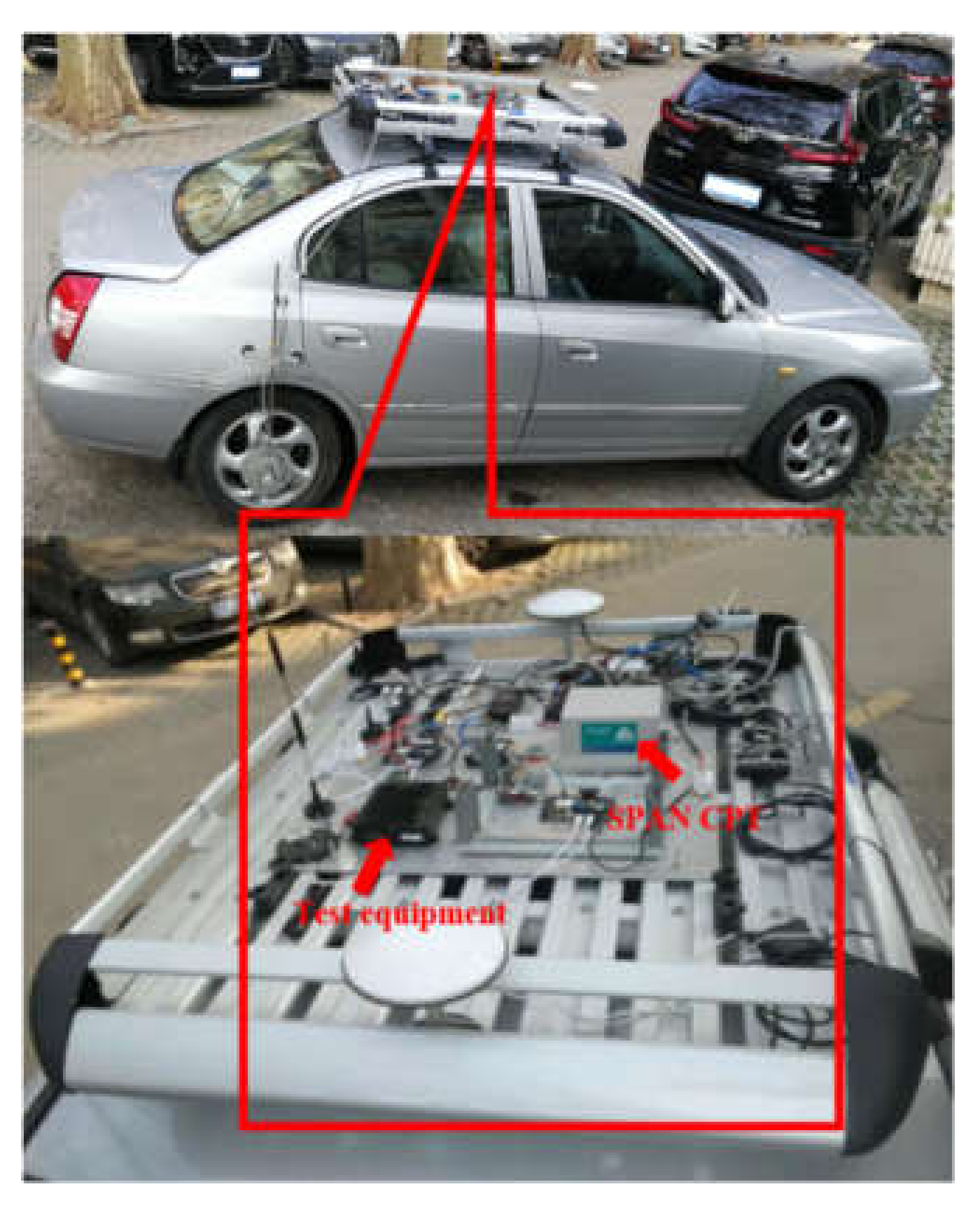
3.1. Training and Testing Dataset Description
3.2. Training Process
4. Test and Result Analysis
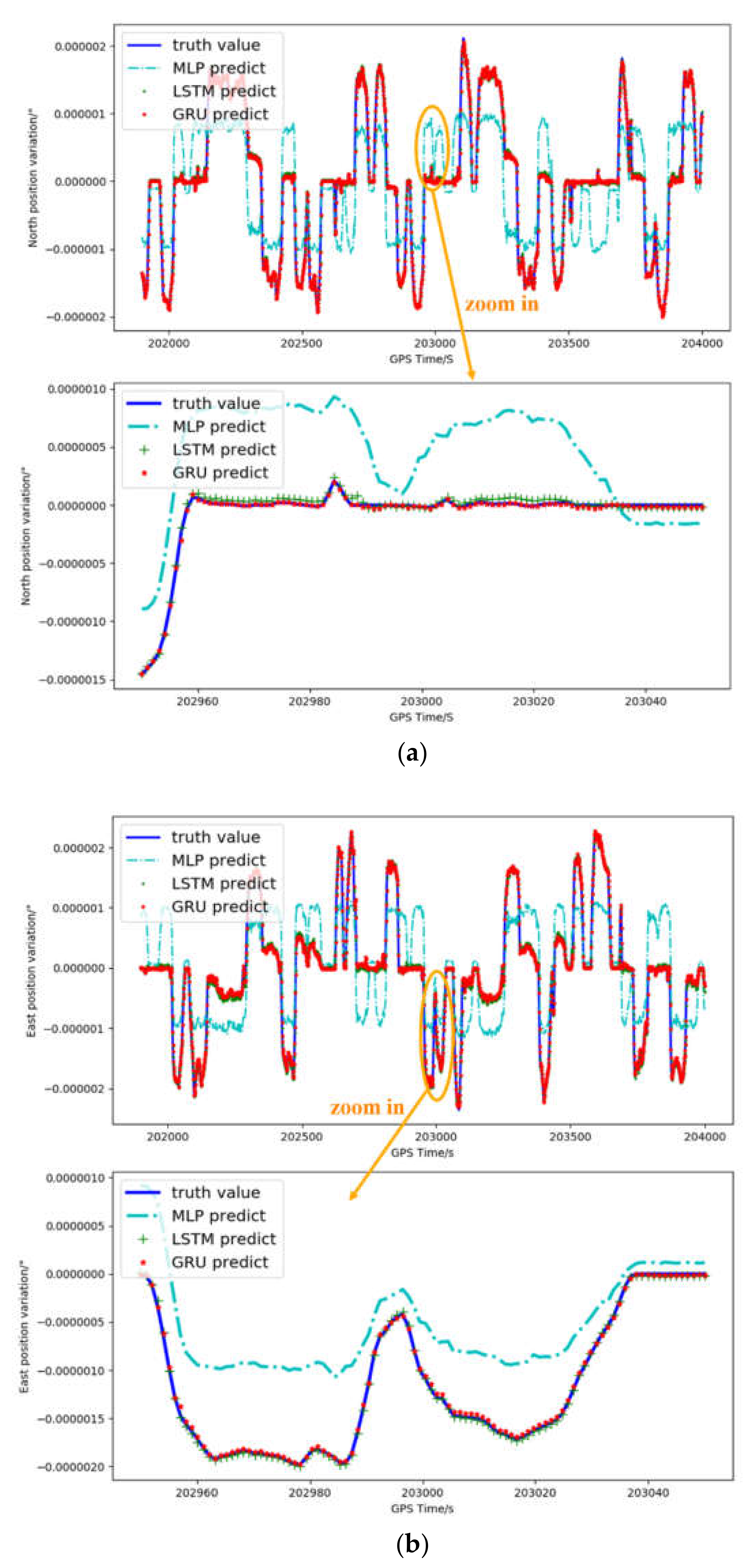
4.1. GRU Prediction Accuracy
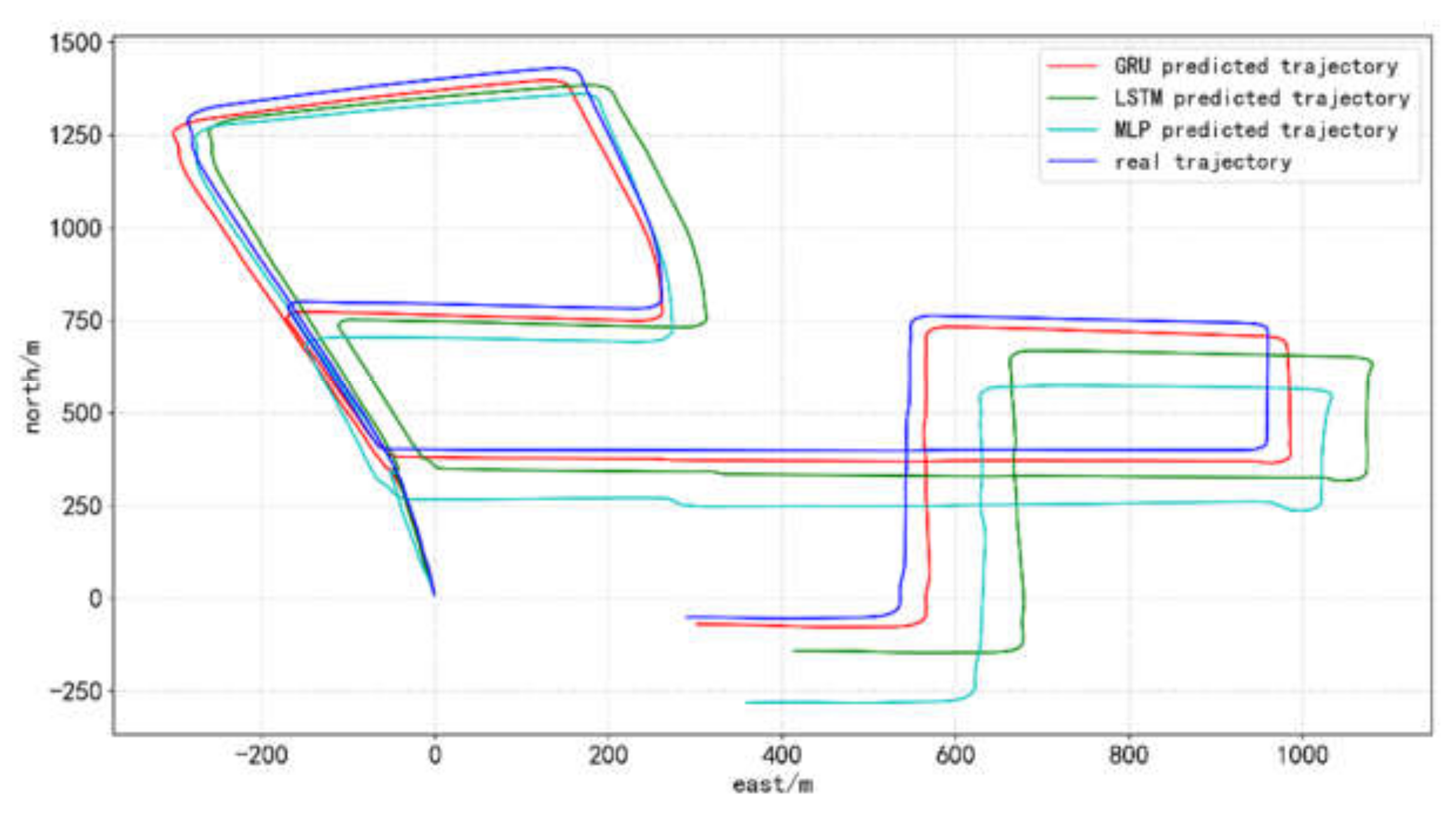
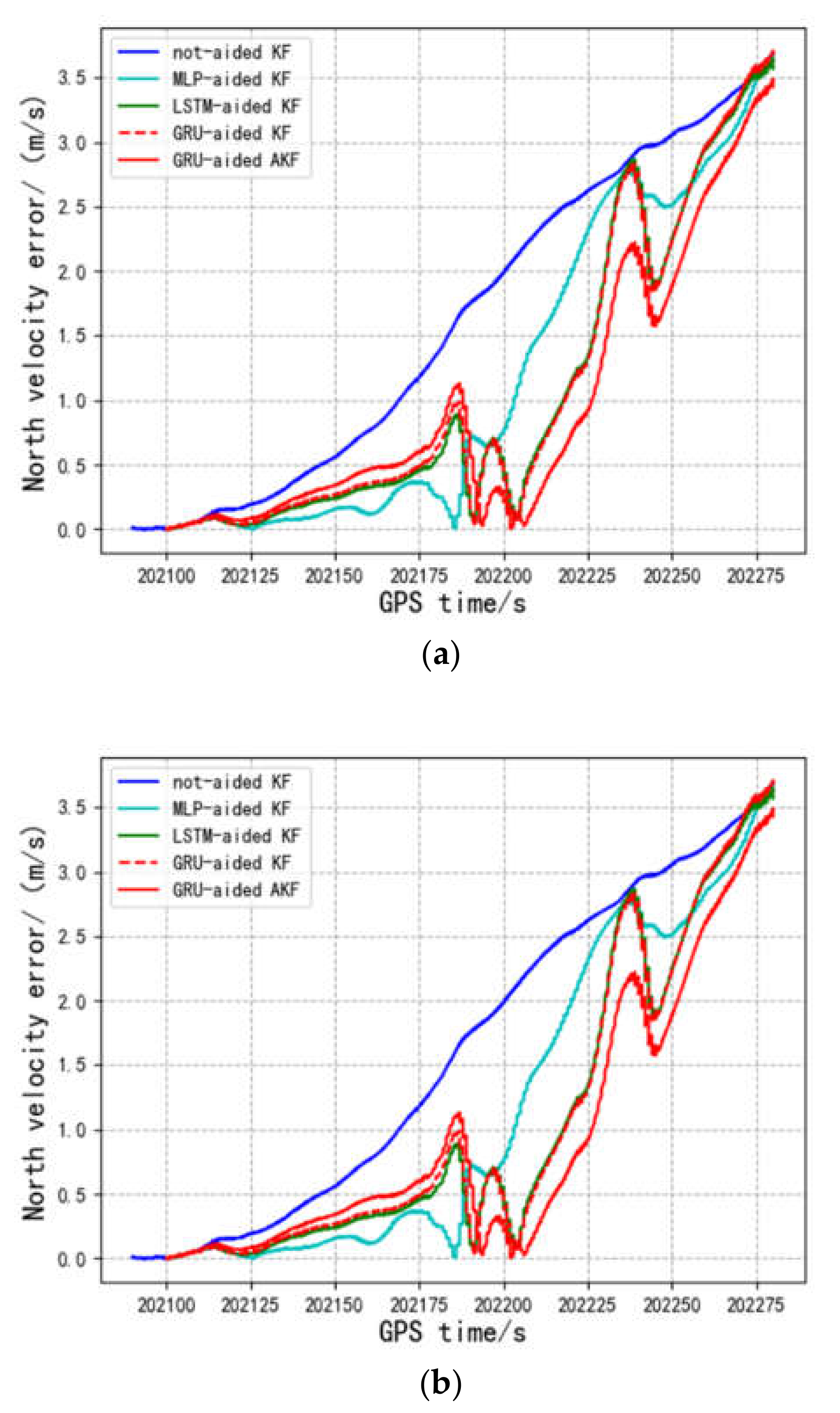
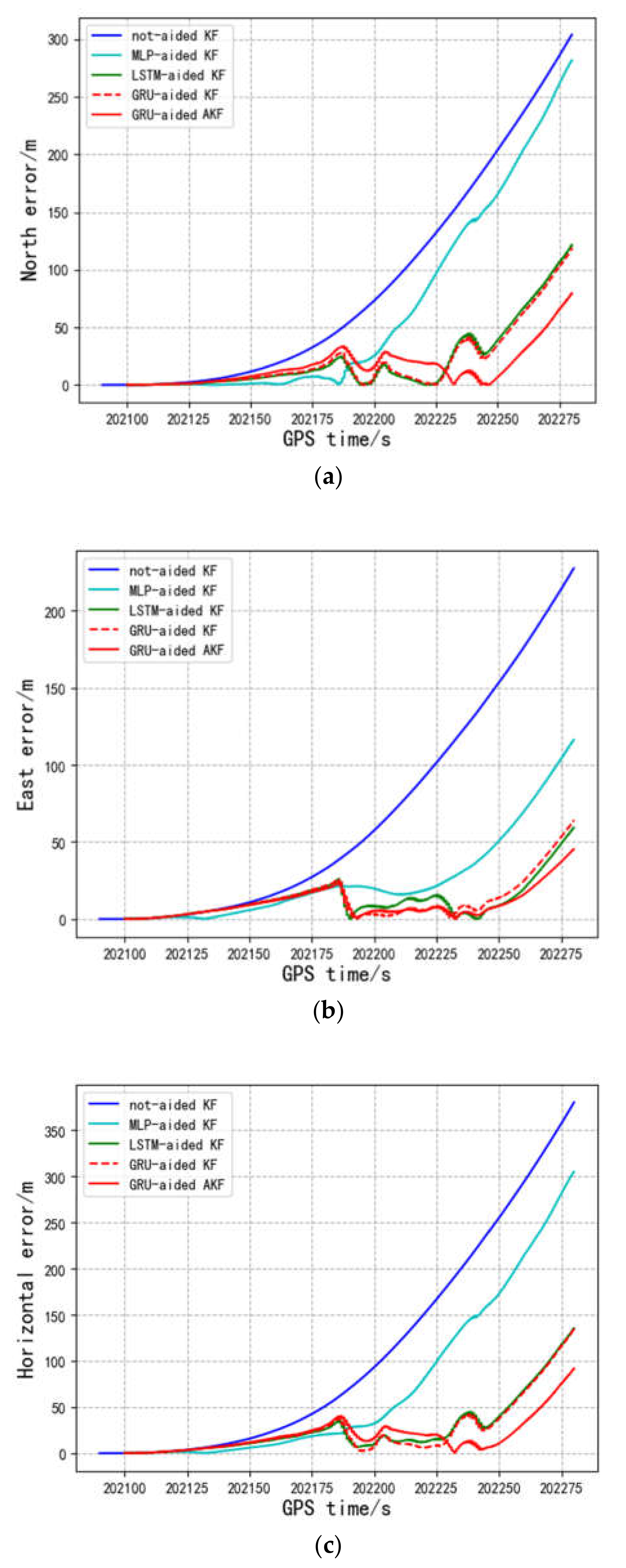
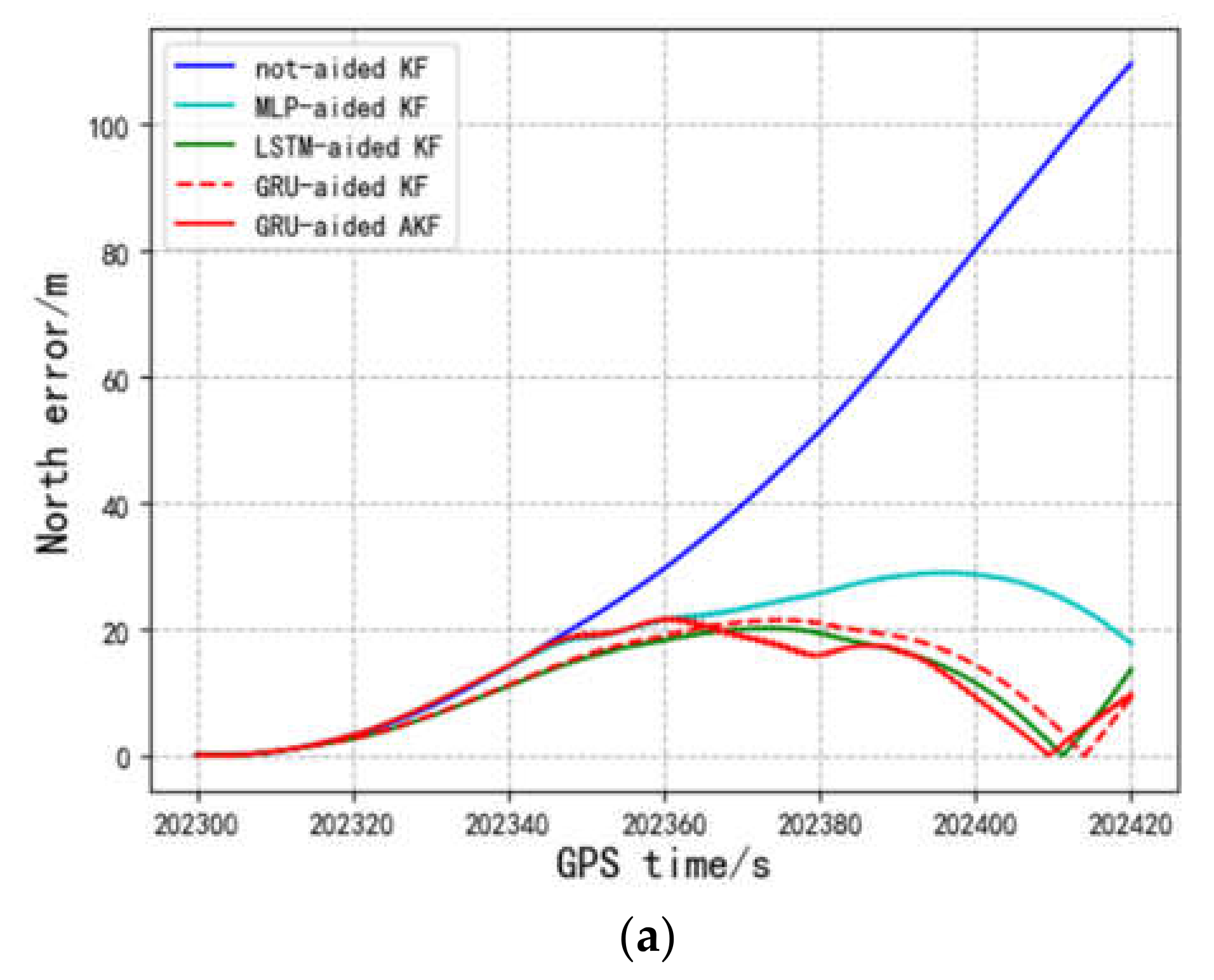
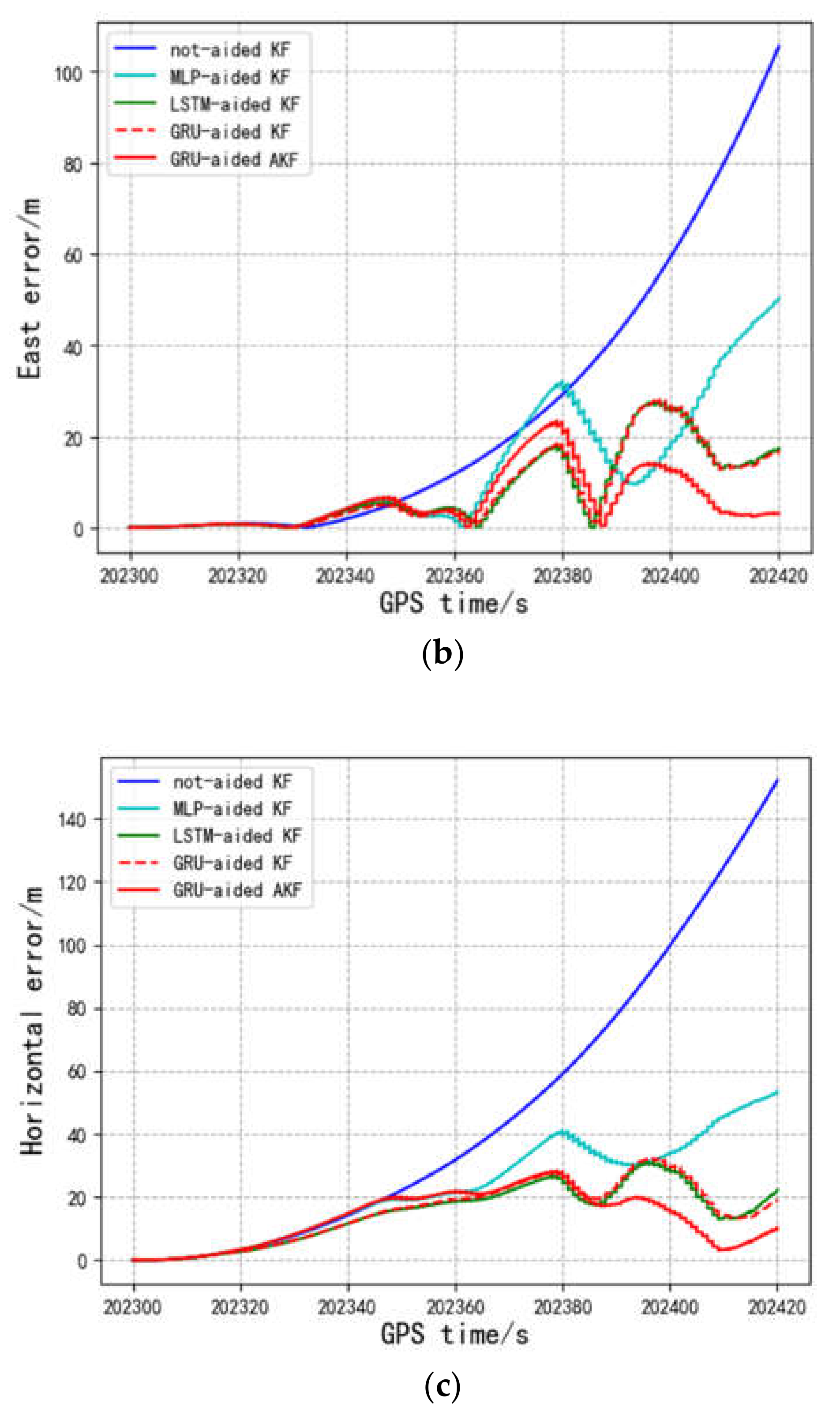
4.2. Integrated Navigation Accuracy
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Godha, S.; Cannon, M.E. GPS/MEMS INS Integrated System for Navigation in Urban Areas. GPS Solut. 2007, 11, 193–203. [Google Scholar] [CrossRef]
- Xiao, Y.; Luo, H.; Zhao, F.; Wu, F.; Gao, X.; Wang, Q.; Cui, L. Residual Attention Network-Based Confidence Estimation Algorithm for Non-Holonomic Constraint in GNSS/INS Integrated Navigation System. IEEE Trans. Veh. Technol. 2021, 70, 11404–11418. [Google Scholar] [CrossRef]
- Grewal, M.S.; Weill, L.R.; Andrews, A.P. Global Positioning Systems, Inertial Navigation, and Integration; John Wiley: Hoboken, NJ, USA, 2001. [Google Scholar]
- Jiang, H.; Shi, C.; Li, T.; Dong, Y.; Li, Y.; Jing, G. Low-cost GPS/INS Integration with Accurate Measurement Modeling Using an Extended State Observer. GPS Solut. J. Glob. Navig. Satell. Syst. 2021, 25, 17. [Google Scholar] [CrossRef]
- Wang, D.; Dong, Y.; Li, Z.; Li, Q.; Wu, J. Constrained MEMS-Based GNSS/INS Tightly Coupled System with Robust Kalman Filter for Accurate Land Vehicular Navigation. IEEE Trans. Instrum. Meas. 2020, 69, 5138–5148. [Google Scholar] [CrossRef]
- Wang, S.Z.; Zhan, X.Q.; Zhai, Y.W.; Chi, C.; Liu, X.Y. Ensuring High Navigation Integrity for Urban Air Mobility Using Tightly Coupled Gnss/Ins System. J. Aeronaut. Astronaut. Aviat. 2020, 52, 429–441. [Google Scholar]
- Kim, Y.; An, J.; Lee, J. Robust Navigational System for a Transporter Using GPS/INS Fusion. IEEE Trans. Ind. Electron. 2018, 65, 3346–3354. [Google Scholar] [CrossRef]
- Basar, T. A New Approach to Linear Filtering and Prediction Problems. In Control Theory: Twenty-Five Seminal Papers (1932–1981); IEEE: Piscataway, NJ, USA, 2001; pp. 167–179. [Google Scholar]
- Priyanka, A. Mems-Based Integrated Navigation; Gnss Technology and Applications Series; Artech House: Boston, MA, USA, 2010. [Google Scholar]
- Yue, Z.; Lian, B.; Gao, Y. Robust Adaptive Filter Using Fuzzy Logic for Tightly-Coupled Visual Inertial Odometry Navigation System. IET Radar Sonar Navig. 2020, 14, 364–371. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Gao, Z.; Niu, X.; El-Sheimy, N. Tight Fusion of a Monocular Camera, MEMS-IMU, and Single-Frequency Multi-GNSS RTK for Precise Navigation in GNSS-Challenged Environments. Remote Sens. 2019, 11, 610. [Google Scholar] [CrossRef] [Green Version]
- Sun, R.; Yang, Y.; Chiang, K.-W.; Duong, T.-T.; Lin, K.-Y.; Tsai, G.-J. Robust IMU/GPS/VO Integration for Vehicle Navigation in GNSS Degraded Urban Areas. IEEE Sens. J. 2020, 20, 10110–10122. [Google Scholar] [CrossRef]
- Wang, M.; Tayebi, A. Hybrid Nonlinear Observers for Inertial Navigation Using Landmark Measurements. IEEE Trans. Autom. Control 2020, 65, 5173–5188. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Guan, L.; Gao, Y.; Du, S.; Wu, M.; Guang, X.; Cong, X. Indoor and Outdoor Low-Cost Seamless Integrated Navigation System Based on the Integration of INS/GNSS/LIDAR System. Remote Sens. 2020, 12, 3271. [Google Scholar] [CrossRef]
- Schütz, A.; Sánchez-Morales, D.E.; Pany, T. Precise Positioning through a Loosely-Coupled Sensor Fusion of Gnss-Rtk, Ins and Lidar for Autonomous Driving. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020. [Google Scholar]
- Batista, P.; Petit, N.; Silvestre, C.; Oliveira, P. Further Results on the Observability in Magneto-Inertial Navigation. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 2503–2508. [Google Scholar]
- Zhu, K.; Guo, X.; Jiang, C.; Xue, Y.; Li, Y.; Han, L.; Chen, Y. MIMU/Odometer Fusion with State Constraints for Vehicle Positioning during BeiDou Signal Outage: Testing and Results. Sensors 2020, 20, 2302. [Google Scholar] [CrossRef] [Green Version]
- Ran, C.; Cheng, X. A Direct and Non-Singular Ukf Approach Using Euler Angle Kinematics for Integrated Navigation Systems. Sensors 2016, 16, 1415. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dissanayake, G.; Sukkarieh, S.; Nebot, E.; Durrant-Whyte, H. The Aiding of a Low-Cost Strapdown Inertial Measurement Unit Using Vehicle Model Constraints for land Vehicle Applications. IEEE Trans. Robot. Autom. 2001, 17, 731–747. [Google Scholar] [CrossRef] [Green Version]
- Sun, W.; Yang, Y. BDS PPP/INS Tight Coupling Method Based on Non-Holonomic Constraint and Zero Velocity Update. IEEE Access 2020, 8, 128866–128876. [Google Scholar] [CrossRef]
- Abdolkarimi, E.S.; Mosavi, M.-R. A Low-Cost Integrated MEMS-Based INS/GPS Vehicle Navigation System with Challenging Conditions Based on an Optimized IT2FNN in Occluded Environments. GPS Solut. 2020, 24, 108. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L. A Hybrid Intelligent Algorithm DGP-MLP for GNSS/INS Integration during GNSS Outages. J. Navig. 2019, 72, 375–388. [Google Scholar] [CrossRef]
- Doostdar, P.; Keighobadi, J.; Hamed, M.A. INS/GNSS Integration Using Recurrent Fuzzy Wavelet Neural Networks. GPS Solut. 2019, 24, 29. [Google Scholar] [CrossRef]
- Al Bitar, N.; Gavrilov, A. A New Method for Compensating the Errors of Integrated Navigation Systems Using Artificial Neural Networks. Measurement 2021, 168, 108391. [Google Scholar] [CrossRef]
- Dai, H.-F.; Bian, H.-W.; Wang, R.-Y.; Ma, H. An INS/GNSS Integrated Navigation in GNSS Denied Environment Using Recurrent Neural Network. Def. Technol. 2020, 16, 334–340. [Google Scholar] [CrossRef]
- Noureldin, A.; El-Shafie, A.; Bayoumi, M. GPS/INS Integration Utilizing Dynamic Neural Networks for Vehicular Navigation. Inf. Fusion 2011, 12, 48–57. [Google Scholar] [CrossRef]
- Lu, S.; Gong, Y.; Luo, H.; Zhao, F.; Li, Z.; Jiang, J. Heterogeneous Multi-Task Learning for Multiple Pseudo-Measurement Estimation to Bridge GPS Outages. IEEE Trans. Instrum. Meas. 2021, 70, 1–16. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, X.; Zhu, C.; Chan, C.-Y. A Hybrid Fusion Algorithm for GPS/INS Integration during GPS Outages. Measurement 2017, 103, 42–51. [Google Scholar] [CrossRef]
- Fang, W.; Jiang, J.; Lu, S.; Gong, Y.; Tao, Y.; Tang, Y.; Yan, P.; Luo, H.; Liu, J. A LSTM Algorithm Estimating Pseudo Measurements for Aiding INS during GNSS Signal Outages. Remote Sens. 2020, 12, 256. [Google Scholar] [CrossRef] [Green Version]
- Assad, A.; Khalaf, W.; Chouaib, I. Radial Basis Function Kalman Filter for Attitude Estimation in GPS-Denied Environment. IET Radar Sonar Navig. 2020, 14, 736–746. [Google Scholar] [CrossRef]
- Jozefowicz, R.; Zaremba, W.; Sutskever, I. An Empirical Exploration of Recurrent Network Architectures. In Proceedings of the 32nd International Conference on International Conference on Machine Learning, Lille, France, 6–11 July 2015; Volume 37, pp. 2342–2350. [Google Scholar]
- Yan, G.; Weng, J. Principle of Strapdown Inertial Navigation Algorithm and Integrated Navigation; Northwestern Polytechnical University Press: Xi’an, China, 2019. [Google Scholar]
- Kottath, R.; Poddar, S.; Das, A.; Kumar, V. Window Based Multiple Model Adaptive Estimation for Navigational Framework. Aerosp. Sci. Technol. 2016, 50, 88–95. [Google Scholar] [CrossRef]
- Yang, Y.; He, H.; Xu, T. Adaptive Robust Filtering for Kinematic Gps Positioning. Acta Geod. Cartogr. Sin. 2001, 30, 293–298. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Parameter | |
|---|---|
| Gyroscope bias stability | 8°/h |
| Gyroscope angle random walk | 0.12°/sqrt(h) |
| Accelerometer bias stability | 0.2 mg |
| Accelerometer velocity random walk | 0.09m/s/sqrt(h) |
| Time Step | Hidden Neurons | North RMSE/° | East RMSE/° | Training Time/s (per Epoch) |
|---|---|---|---|---|
| 1 | 32 | 4.05 × 10−8 | 6.16 × 10−8 | 0.269 |
| 2 | 32 | 3.96 × 10−8 | 5.20 × 10−8 | 0.324 |
| 4 | 32 | 3.99 × 10−8 | 7.18 × 10−8 | 0.486 |
| 8 | 32 | 4.36 × 10−8 | 5.26 × 10−8 | 0.861 |
| 1 | 64 | 4.12 × 10−8 | 4.52 × 10−8 | 0.610 |
| 2 | 64 | 4.86 × 10−8 | 4.18 × 10−8 | 0.741 |
| 4 | 64 | 7.83 × 10−8 | 1.06 × 10−7 | 0.991 |
| 8 | 64 | 4.35 × 10−8 | 5.08 × 10−8 | 1.679 |
| 1 | 128 | 3.66 × 10−8 | 3.56 × 10−8 | 1.017 |
| 2 | 128 | 3.16 × 10−8 | 3.61 × 10−8 | 1.554 |
| 4 | 128 | 3.05 × 10−8 | 3.04 × 10−8 | 1.900 |
| 8 | 128 | 4.96 × 10−8 | 5.44 × 10−8 | 2.781 |
| 1 | 256 | 3.04 × 10−8 | 3.71 × 10−8 | 2.63 |
| 2 | 256 | 3.54 × 10−8 | 4.48 × 10−8 | 3.171 |
| 4 | 256 | 4.41 × 10−8 | 4.75 × 10−8 | 3.903 |
| 8 | 256 | 3.63 × 10−8 | 6.28 × 10−8 | 6.645 |
| North RMSE/rad | East RMSE/rad | |
|---|---|---|
| GRU | 3.05 × 10−8 | 3.04 × 10−8 |
| LSTM | 3.24 × 10−8 | 4.96 × 10−8 |
| MLP | 6.49 × 10−7 | 6.81 × 10−7 |
| North Velocity Error | East Velocity Error | |
|---|---|---|
| Not-aided KF | 3.691 m/s | 2.764 m/s |
| MLP-aided KF | 3.653 m/s | 2.688 m/s |
| LSTM-aided KF | 3.570 m/s | 2.393 m/s |
| GRU-aided KF | 3.627 m/s | 2.352 m/s |
| GRU-aided AKF | 3.430 m/s | 1.750 m/s |
| Maximal North Error | Maximal East Error | Maximal Horizontal Error | Horizontal Error RMS | |
|---|---|---|---|---|
| Not-aided KF | 303.866 m | 227.599 m | 379.652 m | 157.182 m |
| MLP-aided KF | 281.452 m | 116.134 m | 304.471 m | 113.758 m |
| LSTM-aided KF | 120.761 m | 59.109 m | 134.452 m | 40.062 m |
| GRU-aided KF | 117.314 m | 63.462 m | 133.379 m | 39.232 m |
| GRU-aided AKF | 78.949 m | 45.294 m | 91.019 m | 26.680 m |
| Maximal North error | Maximal East Error | Maximal Horizontal Error | Horizontal Eerror RMS | |
|---|---|---|---|---|
| Not-aided KF | 109.639 m | 105.480 m | 152.141 m | 64.258 m |
| MLP-aided KF | 28.513 m | 30.177 m | 53.285 m | 27.342 m |
| LSTM-aided KF | 19.990 m | 26.512 m | 30.291 m | 17.294 m |
| GRU-aided KF | 21.227 m | 26.467 m | 31.532 m | 18.015 m |
| GRU-aided AKF | 21.331 m | 20.544 m | 26.450 m | 15.813 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Jiang, J.; Liu, J.; Yan, P.; Tao, Y.; Liu, J. A GRU and AKF-Based Hybrid Algorithm for Improving INS/GNSS Navigation Accuracy during GNSS Outage. Remote Sens. 2022, 14, 752. https://doi.org/10.3390/rs14030752
Tang Y, Jiang J, Liu J, Yan P, Tao Y, Liu J. A GRU and AKF-Based Hybrid Algorithm for Improving INS/GNSS Navigation Accuracy during GNSS Outage. Remote Sensing. 2022; 14(3):752. https://doi.org/10.3390/rs14030752
Chicago/Turabian StyleTang, Yanan, Jinguang Jiang, Jianghua Liu, Peihui Yan, Yifeng Tao, and Jingnan Liu. 2022. "A GRU and AKF-Based Hybrid Algorithm for Improving INS/GNSS Navigation Accuracy during GNSS Outage" Remote Sensing 14, no. 3: 752. https://doi.org/10.3390/rs14030752