
Variation Characteristics of Multi-Channel Differential Code Biases from New BDS-3 Signal Observations


Abstract
:
1. Introduction
2. Methods and Data
2.1. Ionospheric Estimation Equation
2.2. Ionospheric Correction Based on GIM
2.3. DCB Separation and Estimation
2.4. Experimental Data
3. Results and Analysis
3.1. Quality Analysis of New BDS-3 Signal
3.2. Validation of Satellite DCBs
3.3. Internal Coincidence of Satellite DCB
3.4. Validation and Variation of Receiver DCBs
4. Discussion
5. Conclusions
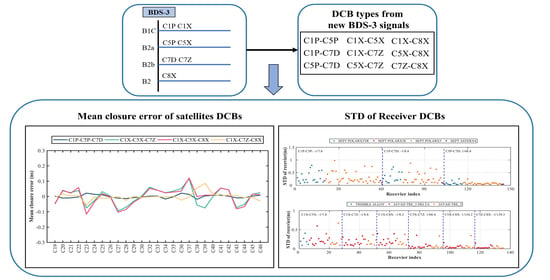
- Compared to the direct DCB values provided by CAS products, the mean bias and RMS of satellite DCBs are within ±0.20 and 0.30 ns, respectively, while the results are mostly within ±0.40 ns when compared with the DLR products.
- By analyzing STD values for each DCB type, our estimated DCBs are more stable than CAS and DLR products. In particular, DCBs of DLR products related to the C1X channel of the C45 satellite have poor stability, leading to a deviation from our estimation and CAS product.
- Four sets of constructed closure errors are within 0.30 ns, and their mean values are less than 0.15 ns, indicating that our estimated satellite DCBs of BDS-3 have high precision.
- The RMS of receiver DCBs is mostly less than 1.50 ns with respect to CAS products. An obvious relationship is found between RMS values and the geographic latitude, e.g., the RMS of C1P-C5P DCB with more than 1.00 ns for stations in low latitude areas. Almost all the receivers of C1X/C5X/C7Z/C8X channels are located at middle and high latitudes, so the receiver DCBs are better consistent with CAS products.
- The STDs of BDS-3 receiver DCBs are within 1.00 ns, which are not as stable as satellite DCBs. The STDs of different receiver types show no significant differences. However, the coefficients of ionospheric correction obtained by different frequencies differ significantly.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, X.; Jin, S. GNSS-Reflectometry: Forest canopies polarization scattering properties and modeling. Adv. Space Res. 2014, 54, 863–870. [Google Scholar] [CrossRef]
- Jin, S.; Zhang, T. Terrestrial Water Storage Anomalies Associated with Drought in Southwestern USA from GPS Observations. Surv. Geophys. 2016, 37, 1139–1156. [Google Scholar] [CrossRef]
- Li, G.; Guo, S.; Lv, J.; Zhao, K.; He, Z. Introduction to global short message communication service of BeiDou-3 navigation satellite system. Adv. Space Res. 2021, 67, 1701–1708. [Google Scholar] [CrossRef]
- Yang, Y.; Mao, Y.; Sun, B. Basic performance and future developments of BeiDou global navigation satellite system. Satell. Navig. 2020, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Jin, S.; Su, K. PPP models and performances from single- to quad-frequency BDS observations. Satell. Navig. 2020, 1, 16. [Google Scholar] [CrossRef]
- Okoh, D.; Onwuneme, S.; Seemala, G.; Jin, S.; Rabiu, B.; Nava, B.; Uwamahoro, J. Assessment of the NeQuick-2 and IRI-Plas 2017 models using global and long-term GNSS measurements. J. Atmos. Sol.-Terr. Phys. 2018, 170, 1–10. [Google Scholar] [CrossRef]
- Li, M.; Yuan, Y.; Zhang, X.; Zha, J. A multi-frequency and multi-GNSS method for the retrieval of the ionospheric TEC and intraday variability of receiver DCBs. J. Geod. 2020, 94, 102. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P. Differential code bias estimation using multi-GNSS observations and global ionosphere maps. In Proceedings of the 2014 International Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 27–29 January 2014; pp. 802–812. [Google Scholar]
- Chen, L.; Yi, W.; Song, W.; Shi, C.; Lou, Y.; Cao, C. Evaluation of three ionospheric delay computation methods for ground-based GNSS receivers. GPS Solut. 2018, 22, 125. [Google Scholar] [CrossRef]
- Li, W.; Wang, G.; Mi, J.; Zhang, S. Calibration errors in determining slant Total Electron Content (TEC) from multi-GNSS data. Adv. Space Res. 2019, 63, 1670–1680. [Google Scholar] [CrossRef]
- Zhang, B.; Ou, J.; Yuan, Y.; Li, Z. Extraction of line-of-sight ionospheric observables from GPS data using precise point positioning. Sci. China Earth Sci. 2012, 55, 1919–1928. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B.; Yuan, Y.; Zhang, X. On the application of the raw-observation-based PPP to global ionosphere VTEC modeling: An advantage demonstration in the multi-frequency and multi-GNSS context. J. Geod. 2019, 94, 1. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J.; Yuan, Y.; Zhang, X.; Li, M. A modified carrier-to-code leveling method for retrieving ionospheric observables and detecting short-term temporal variability of receiver differential code biases. J. Geod. 2019, 93, 19–28. [Google Scholar] [CrossRef] [Green Version]
- Su, K.; Jin, S.; Jiang, J.; Hoque, M.; Yuan, L. Ionospheric VTEC and satellite DCB estimated from single-frequency BDS observations with multi-layer mapping function. GPS Solut. 2021, 25, 68. [Google Scholar] [CrossRef]
- Klobuchar, J.A. Ionospheric Time-Delay Algorithm for Single-Frequency GPS Users. IEEE Trans. Aerosp. Electron. Syst. 1987, AES-23, 325–331. [Google Scholar] [CrossRef]
- Nava, B.; Coïsson, P.; Radicella, S.M. A new version of the NeQuick ionosphere electron density model. J. Atmos. Sol.-Terr. Phys. 2008, 70, 1856. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, N.; Li, Z.; Huo, X. The BeiDou global broadcast ionospheric delay correction model (BDGIM) and its preliminary performance evaluation results. NAVIGATION-J. Inst. Navig. 2019, 66, 55–69. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Wang, N.; Liu, A.; Yuan, Y.; Wang, L.; Hernández-Pajares, M.; Krankowski, A.; Yuan, H. Status of CAS global ionospheric maps after the maximum of solar cycle 24. Satell. Navig. 2021, 2, 19. [Google Scholar] [CrossRef]
- Orus-Perez, R.; Nava, B.; Parro, J.; Kashcheyev, A. ESA UGI (Unified-GNSS-Ionosphere): An open-source software to compute precise ionosphere estimates. Adv. Space Res. 2021, 67, 56–65. [Google Scholar] [CrossRef]
- Yuan, Y.; Ou, J. A generalized trigonometric series function model for determining ionospheric delay. Prog. Nat. Sci. 2004, 14, 1010–1014. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Xue, J.; Song, S.; Zhu, W. Estimation of differential code biases for Beidou navigation system using multi-GNSS observations: How stable are the differential satellite and receiver code biases? J. Geod. 2016, 90, 309–321. [Google Scholar] [CrossRef]
- Zhu, Y.; Tan, S.; Feng, L.; Cui, X.; Zhang, Q.; Jia, X. Estimation of the DCB for the BDS-3 new signals based on BDGIM constraints. Adv. Space Res. 2020, 66, 1405–1414. [Google Scholar] [CrossRef]
- Li, M.; Yuan, Y. Estimation and Analysis of BDS2 and BDS3 Differential Code Biases and Global Ionospheric Maps Using BDS Observations. Remote Sens. 2021, 13, 370. [Google Scholar] [CrossRef]
- Wang, Q.; Jin, S.; Yuan, L.; Hu, Y.; Chen, J.; Guo, J. Estimation and Analysis of BDS-3 Differential Code Biases from MGEX Observations. Remote Sens. 2020, 12, 68. [Google Scholar] [CrossRef] [Green Version]
- Deng, Y.; Guo, F.; Zhang, X.; Liu, W. Estimation and analysis of the multi-frequency and multi-channel DCB for BDS-3. Acta Geod. Cartogr. Sin. 2021, 50, 448. [Google Scholar]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Jin, R.; Jin, S.; Feng, G. M_DCB: Matlab code for estimating GNSS satellite and receiver differential code biases. GPS Solut. 2012, 16, 541–548. [Google Scholar] [CrossRef]
- Ma, G.; Gao, W.; Li, J.; Chen, Y.; Shen, H. Estimation of GPS instrumental biases from small scale network. Adv. Space Res. 2014, 54, 871–882. [Google Scholar] [CrossRef]
- Schaer, S. Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System; Astronomical Institute, University of Berne: Bern, Switzerland, 1999. [Google Scholar]
- Schaer, S.; Gurtner, W.; Feltens, J. IONEX: The ionosphere map exchange format version 1. In Proceedings of the IGS AC workshop, Darmstadt, Germany, 9–11 February 1998. [Google Scholar]
- Wang, N.; Yuan, Y.; Li, Z.; Montenbruck, O.; Tan, B. Determination of differential code biases with multi-GNSS observations. J. Geod. 2016, 90, 209–228. [Google Scholar] [CrossRef]
- Jin, S.G.; Jin, R.; Li, D. Assessment of BeiDou differential code bias variations from multi-GNSS network observations. Ann. Geophys. 2016, 34, 259–269. [Google Scholar] [CrossRef] [Green Version]
- Ren, X.; Zhang, X.; Xie, W.; Zhang, K.; Yuan, Y.; Li, X. Global Ionospheric Modelling using Multi-GNSS: BeiDou, Galileo, GLONASS and GPS. Sci. Rep. 2016, 6, 33499. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Teunissen, P.J.G. Characterization of multi-GNSS between-receiver differential code biases using zero and short baselines. Sci. Bull. 2015, 60, 1840–1849. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Freq. Band | Frequency/MHz | Channel Codes of Pseudorange |
|---|---|---|---|
| BDS-2 | B2 | 1207.140 | C7I C7Q C7X |
| BDS-2/3 | B1 | 1561.098 | C2I C2Q C2X |
| B3 | 1268.52 | C6I C6Q C6X | |
| BDS-3 | B1C | 1575.42 | C1D C1P C1X |
| B2a | 1176.45 | C5D C5P C5X | |
| B2b | 1207.140 | C7D C7P C7Z | |
| B2(a+b) | 1191.795 | C8D C8P C8X |
| Freq. Band | Pseudorange Observation Channels | |||
|---|---|---|---|---|
| Combination 1 | Stations Number | Combination 2 | Stations Number | |
| B1C-B2a | C1P-C5P | 60 | C1X-C5X | 28 |
| B1C-B2b | C1P-C7D | 43 | C1X-C7Z | 23 |
| B2a-B2b | C5P-C7D | 42 | C5X-C7Z | 23 |
| B1C-B2(a + b) | C1X-C8X | 21 | ||
| B2a-B2(a + b) | C5X-C8X | 23 | ||
| B2b-B2(a + b) | C7Z-C8X | 19 | ||
| Type | CAS | DLR | Our Results | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Max | Min | Mean | Max | Min | Mean | Max | Min | Mean | |
| C1P-C5P | 0.115 (C42) | 0.040 (C39) | 0.076 | 0.100 (C42) | 0.049 (C39) | 0.072 | |||
| C1P-C7D | 0.087 (C34) | 0.045 (C38) | 0.066 | ||||||
| C5P-C7D | 0.036 (C43) | 0.013 (C26) | 0.025 | ||||||
| C1X-C5X | 0.128 (C30) | 0.050 (C40) | 0.087 | 0.470 (C45) | 0.065 (C40) | 0.125 | 0.195 (C37) | 0.050 (C27) | 0.092 |
| C1X-C7Z | 0.118 (C36) | 0.056 (C40) | 0.092 | 0.465 (C45) | 0.079 (C44) | 0.130 | 0.168 (C37) | 0.049 (C30) | 0.091 |
| C5X-C7Z | 0.120 (C36) | 0.035 (C40) | 0.075 | 0.215 (C39) | 0.073 (C36) | 0.111 | 0.075 (C37) | 0.023 (C27) | 0.042 |
| C1X-C8X | 0.131 (C46) | 0.066 (C40) | 0.097 | 0.490 (C45) | 0.080 (C35) | 0.129 | 0.191 (C37) | 0.043 (C27) | 0.095 |
| C5X-C8X | 0.117 (C44) | 0.039 (C40) | 0.071 | 0.213 (C39) | 0.065 (C36) | 0.104 | 0.052 (C22) | 0.016 (C23) | 0.029 |
| C7Z-C8X | 0.085 (C22) | 0.021 (C40) | 0.055 | 0.093 (C43) | 0.040 (C24) | 0.060 | 0.051 (C29) | 0.011 (C40) | 0.022 |
| Observation Channels | Receiver Type | Station | |||||
|---|---|---|---|---|---|---|---|
| C1P/C5P/C7D | SEPT POLARX5TR | AMC4 | BREW | BRUX | CEBR | GAMG | GODE |
| HARB | KOUG | MGUE | NLIB | NNOR | ONSA | ||
| PARK | SPT0 | STJ3 | THTG | USN7 | YEL2 | ||
| SEPT POLARX5 | ABPO | ALIC | AREG | ARUC | CHPI | DGAR | |
| FAA1 | FALK | GOP6 | HAL1 | IISC | JPLM | ||
| KIR0 | KIRU | KITG | KOUR | MAL2 | MAO0 | ||
| MAR6 | MDO1 | METG | MIZU | MKEA | NKLG | ||
| NYA2 | OUS2 | PTGG | QAQ1 | REDU | SANT | ||
| SCOR | SEYG | SUTH | THU2 | USUD | VACS | ||
| VILL | VIS0 | ||||||
| SEPT POLARX5E | KOS1 | ||||||
| SEPT ASTERX4 | KIT3 | RIO2 | TASH | ||||
| C1X/C5X/C7Z/C8X | TRIMBLE ALLOY | BRST | CHPG | LMMF | OWMG | UNB3 | |
| JAVAD TRE_3 DELTA | ARHT | BRMG | FFMJ | GCGO | GODN | GODS | |
| HUEG | LEIJ | MET3 | PIE1 | SOD3 | TIT2 | ||
| WARN | WTZZ | ||||||
| JAVAD TRE_3 | ENAO | LPGS | POTS | SGOC | SUTM | ULAB | |
| URUM | WIND | WUH2 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Q.; Jin, S. Variation Characteristics of Multi-Channel Differential Code Biases from New BDS-3 Signal Observations. Remote Sens. 2022, 14, 594. https://doi.org/10.3390/rs14030594
Shi Q, Jin S. Variation Characteristics of Multi-Channel Differential Code Biases from New BDS-3 Signal Observations. Remote Sensing. 2022; 14(3):594. https://doi.org/10.3390/rs14030594
Chicago/Turabian StyleShi, Qiqi, and Shuanggen Jin. 2022. "Variation Characteristics of Multi-Channel Differential Code Biases from New BDS-3 Signal Observations" Remote Sensing 14, no. 3: 594. https://doi.org/10.3390/rs14030594