
Weather Radar in Complex Orography

 , , , and
, , , and
Abstract
:1. Introduction
Outline
2. Practical Applications, Needs and Requirements
2.1. The Scales of Interest
2.2. Operational Applications in the Swiss Alps
2.3. Radar System Requirements
- Resolution in time: A high temporal update rate, of the order of a few minutes, is required to capture the rapid evolution of thunderstorms and hail cells, which originate flash floods, debris flows and landslides in steep orography.
- Timeliness: Fast data transmission and processing is critical in the context of air traffic control and the issuing of warnings. The radar products have to be ready for submission to the user within about 60 s after the end of a radar volume scan.
- Resolution in space: A horizontal mesh size of the order of a kilometre is required to capture rainfall peaks that trigger debris flows, to identify hail pixels inside thunderstorms and to properly describe gradients in thunderstorms and rainfall fields. It is beneficial to have information at scales smaller than 1 km for debris flow warnings and accurate localisation of hail.
- Dynamic range: A network of surveillance radars used for nowcasting has to detect all the different types of precipitation, from weak drizzle to heavy rainfall and hail, for all ranges. This translates into a dynamic range of >100 dB.
- Sensitivity: Heavy precipitation and thunderstorms result in high reflectivity values. Therefore, their detection does not put the sensitivity of a radar under pressure. However, sensitivity is critical for other reasons. First, surveillance at long ranges, to see the approaching weather for nowcasting purposes, requires high sensitivity. Second, because of the shielding of the radar beam by the terrain, a substantial part of the measurements in orographic regions are made at a high altitude, that is, in snow, where echoes are weak. These measurements from aloft are then extrapolated to the ground using various techniques. Third, in order to use the Sun for monitoring purposes, the minimum detectable signal (MDS) has to be at least a couple of decibels below the level of the Sun’s signal [110]. If the Sun is also to be used for the absolute calibration of a dual-polarisation receiver, the MDS has to be about 8 dB below the level of the quiet Sun [111]. Indicatively, a surveillance radar must be able to detect echoes down to 10 dBZ at a distance of 200 km.
- Stability: Users expect to obtain the same numbers and warning levels in comparable situations. A high stability of the radar hardware is therefore important. One dB is a number that is commonly cited for the stability of reflectivity, and 0.2 dB, which represents an additional challenge, is mentioned for differential reflectivity.
- Accuracy and resolution in intensity: Accuracy and resolution are obviously important, but it is not possible to provide one number as a generic answer for reflectivity. The same applies for differential reflectivity, radial wind, the specific differential phase and other radar variables. The question has to be put in the context of a specific application, taking into account all the different types of uncertainties involved in the end-to-end chain and also considering the sensitivity of the application to errors. The cost-loss ratio is one of many ways of doing this.
- Information on uncertainties: In modern automatic quantitative applications, it is common practice to take into account information about the uncertainty of the radar product. This is a broad issue, and the requirement depends on the application. For instance, radar rainfall maps and nowcasts need to come as ensembles for hydrological runoff modelling in steep Alpine catchments, in order to deal appropriately with the uncertainties and their space-time covariances in the hydrological model.
- Vertical scanning: It is essential, for the severity ranking of thunderstorms and the identification of hail, to scan from the ground up to the top of the troposphere with a sufficiently high vertical resolution. Small increments of the elevation angle between successive scans at the lowest sweeps help to improve quantitative precipitation estimates over complex terrain.
- Continuity: The user expects a certain degree of spatiotemporal continuity in radar products. Sharp artificial discontinuities and artefacts irritate users and may lead to errors in the algorithms that use radar data as input.
- Availability: On the basis of the users’ requirements, radar operators typically aim at an availability of radar data above 99%.
- Traceability: It is important, in the context of warnings and air traffic control, to record any changes in hardware, software and configuration, to document maintenance work, to archive all calibration values and hardware status parameters and to use calibrated maintenance tools.
- Product redundancy: It is necessary to run different algorithms in parallel for the same type of product to cope with the weaknesses of a single method and to have redundancy when one of the algorithms is upgraded or does not perform well for various reasons. Dual-polarisation QPE approaches, for instance, result in a higher accuracy, but are more sensitive to small hardware instabilities than a single-polarisation algorithm. It is therefore recommended to run both in parallel.
- Innovation and verification: Both are essential to be able to satisfy the continuously increasing demands of the users.
3. Challenges
3.1. Planning and Installation
3.2. Maintenance and Operation
3.3. Reflection and Shielding by the Terrain
3.4. Other Challenges
4. Solutions and Results
4.1. Design Considerations
4.2. Siting
4.3. Installation, Acceptance Testing and Lightning Protection
4.4. Radio Frequency and Polarimetry
4.5. Receiver over Elevation Design
- The reception path is short, which results in improved sensitivity;
- On transmission, the same waveguide and the same rotary joint are used for both the horizontal (H) and vertical (V) polarisations up to the power divider (magic-T) on the back of the antenna, which results in higher accuracy for dual-polarisation moments;
- The transmission and reception paths are symmetric for H and V polarisation;
- There is no need for an expensive (and sometimes fragile) dual-channel rotary joint.
4.6. Scanning the Atmosphere over Complex Orography
- The total number of sweeps in a volume scan, which is important for a thunderstorm severity estimation, hail identification, QPE, hydrometeor classification, mesocyclone detection and wind retrieval;
- The number of sweeps and angular overlappings at low heights close to the terrain, a critical aspect for QPE processing;
- The number of independent measurements per ray, which determines the precision of an individual measurement;
- The maximum height up to which echoes are sampled, which is relevant for the estimation of the echo top, VIL, the wind profile, thunderstorm severity and hail identification;
- The conical volume above the radar, where no measurements are made (the so-called cone of silence);
- The total time required to complete a volume scan, a critical parameter in the context of air traffic control, nowcasting and issuing automatic warnings;
- The pulse repetition frequency, PRF, which determines, in opposite directions, the maximum unambiguous range and the Nyquist interval. The latter has an impact on wind retrieval and mesocyclone detection;
- The diversity in the Nyquist velocity between neighbouring sweeps, which helps in de-aliasing;
- The order of the sweeps: for instance, an interleaved approach reduces the effects of temporal undersampling of rapidly evolving storms.
4.7. Pulse Length
4.8. Calibration, Monitoring and Control
4.9. Availability and Timeliness

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Percentiles | Within | ||||
|---|---|---|---|---|---|
| 50th | 90th | 99th | 99.9th | 60 s | |
| Unit | s | s | s | s | % |
| Base products (including radar QPE) | 0 | 8 | 39 | 43 | 99.95 |
| Thunderstorm nowcasting | 5 | 16 | 45 | 82 | 99.87 |
| Heavy precipitation warnings | 5 | 16 | 46 | 82 | 99.87 |
| All products | 22 | 40 | 74 | 123 | 96.61 |
- Maximising the availability of each single radar (this puts demands on: the hardware, system design, monitoring capabilities, organisation of the spare parts, training and operational organisation of the technicians and engineers, support contract with radar manufacturer);
- Exploiting the redundancy of overlapping radars, in a network approach, by means of intelligent multiradar compositing (this puts demands on the siting, maximum range, scan strategy and multiradar data processing);
- Incorporating data from foreign radars in the product generation;
- Having an automatic switch to a fallback solution, which is based on data from other observation systems or models (for instance, satellite and lightning data for thunderstorm nowcasting);
- Training the users to be able to handle the situation, in the case of failures or interruptions, with whatever data are available.
| 2014 | 2015 | 2016 | 2017 | 2018 | 2019 | 2020 | |
|---|---|---|---|---|---|---|---|
| (A) Number of radars | 3/4 | 4 | 5 | 5 | 5 | 5 | 5 |
| Central radar data processing server, time in % of year | |||||||
| (B) Productive time | >99.99 | >99.99 | 99.74 a | >99.99 | >99.99 | >99.99 | >99.99 |
| Radar network, time in % of year | |||||||
| (C) Nationwide | 98.1 | 99.8 | 99.9 | 99.9 | 99.8 | 99.8 | 99.9 |
| (D) Max 1 radar missing | 99.8 | 99.5 | 99.5 | 99.8 | 99.8 | 99.9 | |
| Single radar, operation time in % of year | |||||||
| Average value of all the radars | |||||||
| (E) Preventive + faults | 98.5 | 97.5 | 97.0 | 97.5 | 97.2 | 98.5 | |
| (F) Faults only | 99.5 | 98.5 | |||||
| Radar with the poorest performance | |||||||
| (G) Preventive + faults | 97.9 | 96.6 | 95.2 | 94.2 | 91.5 b | 95.7 | |
4.10. Data Processing and Product Generation
| 1997 | 2005 | 2007 | 2009 | 2012 | 2014 | 2016 | 2018 | 2020 | |
|---|---|---|---|---|---|---|---|---|---|
| 2006 | 2008 | 2010 | 2013 | 2015 | 2017 | 2019 | 2021 | ||
| Number of radars | 3 | 3 | 3 | 3 | 3 | 3/4 | 5 | 5 | 5 |
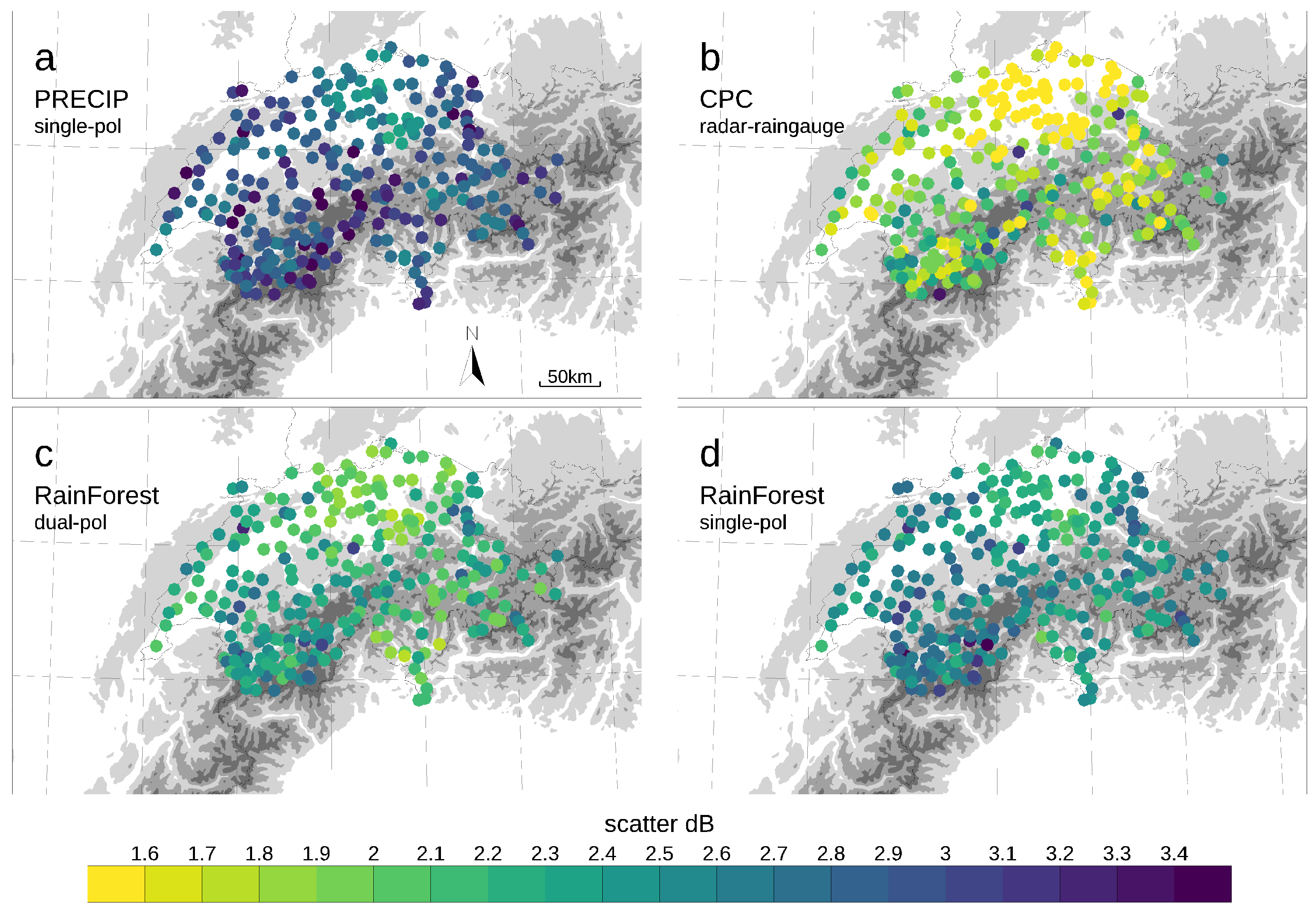
| Scatter in dB, hourly precipitation, the whole of Switzerland | |||||||||
| Radar-only | 4.0 | 2.9 | 2.9 | 2.9 | 2.9 | 2.9 | 2.7 | 2.8 | 2.5 |
| Radar rain gauge | 2.5 | 2.3 | 2.4 | 2.2 | 2.1 | 1.9 | 1.9 | 1.7 | |
4.11. Multisource Data Integration
4.12. Modelling and Propagation of Uncertainty and End-to-End Processing Chains
4.13. Specific Needs and Customised Applications
5. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| anaprop | Anomalous propagation |
| COSMO | The NWP model of the Consortium for Small-scale Modeling |
| CPC | Product identifier for radar rain gauge QPE |
| JJA | June, July and August |
| K | Specific differential phase, a dual-polarisation parameter |
| LEHA | Largest expected hail size on a reference area |
| MDS | Minimum detectable signal |
| METAR | Meteorological terminal air report |
| NWP | Numerical weather prediction |
| MESHS | Maximum expected severe hail size |
| POH | Probability of hail |
| PRF | Pulse repetition frequency |
| QPE | Quantitative precipitation estimation |
| RLAN | Radio local area network |
| ROEL | Receiver mounted over elevation |
| Rx | Receiver |
| SYNOP | Surface synoptic observation |
| TR-limiter | Transmit-receive limiter (a device used to protect a receiver from a transmit signal) |
| TRT | Thunderstorm radar tracking |
| VIL | Vertically integrated liquid water |
| Z | Differential reflectivity, a dual-polarisation parameter |
References
- Germann, U.; Boscacci, M.; Gabella, M.; Schneebeli, M. Weather radar in Switzerland. In From Weather Observations to Atmospheric and Climate Sciences in Switzerland; Willemse, S., Furger, M., Eds.; VDF: Zurich, Switzerland, 2016. [Google Scholar] [CrossRef]
- Joss, J.; Waldvogel, A. Precipitation measurement and hydrology. In Radar in Meteorology: Battan Memorial and 40th Anniversary Radar Meteorology Conference; Atlas, D., Ed.; Amer. Meteor. Soc.: Boston, US, USA, 1990; pp. 577–597. [Google Scholar] [CrossRef]
- Joss, J.; Lee, R.L. The Application of RadarGauge Comparisons to Operational Precipitation Profile Corrections. J. Appl. Meteorol. 1995, 34, 2612–2630. [Google Scholar] [CrossRef] [Green Version]
- Germann, U.; Galli, G.; Boscacci, M.; Bolliger, M. Radar precipitation measurement in a mountainous region. Q. J. R. Meteorol. Soc. 2006, 132, 1669–1692. [Google Scholar] [CrossRef]
- Germann, U.; Boscacci, M.; Gabella, M.; Sartori, M. Peak performance—Radar design for the prediction in the Swiss Alps. Meteorol. Technol. Int. 2015, 4, 42–45. [Google Scholar]
- Germann, U.; i Ventura, J.F.; Gabella, M.; Hering, A.; Sideris, I.; Calpini, B. Alpine weather radar: Triggering innovation. Meteorol. Technol. Int. 2016, 4, 62–65. [Google Scholar]
- Germann, U.; Nerini, D.; Sideris, I.; Foresti, L.; Hering, A.; Calpini, B. Real-time radar—A new Alpine radar network. Meteorol. Technol. Int. 2017, 4, 88–92. [Google Scholar]
- Kaltenboeck, R. New generation of dual polarized weather radars in Austria. In Proceedings of the Seventh European Conference on Radar in Meteorology and Hydrology, Toulouse, France, 24–29 June 2012; p. 6. [Google Scholar]
- Beck, J.; Bousquet, O. Using Gap-Filling Radars in Mountainous Regions to Complement a National Radar Network: Improvements in Multiple-Doppler Wind Syntheses. J. Appl. Meteor. Climatol. 2013, 52, 1836–1850. [Google Scholar] [CrossRef] [Green Version]
- i Ventura, J.F.; Tabary, P. The New French Operational Polarimetric Radar Rainfall Rate Product. J. Appl. Meteor. Climatol. 2013, 52, 1817–1835. [Google Scholar] [CrossRef]
- Yu, N.; Gaussiat, N.; Tabary, P. Polarimetric X-band weather radars for quantitative precipitation estimation in mountainous regions. Q. J. R. Meteorol. Soc. 2018, 144, 2603–2619. [Google Scholar] [CrossRef]
- Delrieu, G.; Caoudal, S.; Creutin, J.D. Feasibility of Using Mountain Return for the Correction of Ground-Based X-Band Weather Radar Data. J. Atmos. Oceanic Technol. 1997, 14, 368–385. [Google Scholar] [CrossRef]
- Delrieu, G.; Serrar, S.; Guardo, E.; Creutin, J.D. Rain Measurement in Hilly Terrain with X-Band Weather Radar Systems: Accuracy of Path-Integrated Attenuation Estimates Derived from Mountain Returns. J. Atmos. Oceanic Technol. 1999, 16, 405–416. [Google Scholar] [CrossRef]
- Delrieu, G.; Khanal, A.K.; Yu, N.; Cazenave, F.; Boudevillain, B.; Gaussiat, N. Preliminary investigation of the relationship between differential phase shift and path-integrated attenuation at the X band frequency in an Alpine environment. Atmos. Meas. Tech. 2020, 13, 3731–3749. [Google Scholar] [CrossRef]
- Bechini, R.; Cremonini, R. The weather radar system of north-western Italy: An advanced tool for meteorological surveillance. In Proceedings of the Second European Conference on Radar in Meteorology and Hydrology, Delft, The Netherlands, 18–22 November 2002; Copernicus: Gottingen, Germany, 2002; pp. 400–404. [Google Scholar]
- Gabella, M.; Joss, J.; Perona, G. Optimizing quantitative precipitation estimates using a non-coherent and a coherent radar operating on the same area. J. Geophys. Res. 2000, 105, 2237–2245. [Google Scholar] [CrossRef]
- Dinku, T.; Anagnostou, E.N.; Borga, M. Improving Radar-Based Estimation of Rainfall over Complex Terrain. J. Appl. Meteor. 2002, 41, 1163–1178. [Google Scholar] [CrossRef]
- Fornasiero, A.; Bech, J.; Alberoni, P.P. Enhanced radar precipitation estimates using a combined clutter and beam blockage correction technique. Nat. Hazards Earth Syst. Sci. 2006, 6, 697–710. [Google Scholar] [CrossRef] [Green Version]
- Minciardi, R.; SAcile, R.; Siccardi, F. Optimal Planning of a Weather Radar Network. J. Atmos. Oceanic Technol. 2003, 20, 1251–1263. [Google Scholar] [CrossRef]
- Cremonini, R.; Bechini, R. Heavy Rainfall Monitoring by Polarimetric C-Band Weather Radars. Water 2010, 2, 838–848. [Google Scholar] [CrossRef]
- Vulpiani, G.; Montopoli, M.; Passeri, L.D.; Gioia, A.G.; Giordano, P.; Marzano, F.S. On the Use of Dual-Polarized C-Band Radar for Operational Rainfall Retrieval in Mountainous Areas. J. Appl. Meteorol. Climatol. 2012, 51, 405–425. [Google Scholar] [CrossRef]
- Montopoli, M.; Roberto, N.; Adirosi, E.; Gorgucci, E.; Baldini, L. Investigation ofWeather Radar Quantitative Precipitation Estimation Methodologies in Complex Orography. Atmosphere 2017, 8, 34. [Google Scholar] [CrossRef] [Green Version]
- Crum, T.D.; Alberty, R.L. The WSR-88D and the WSR-88D Operational Support Facility. Bull. Amer. Meteor. Soc. 1993, 74, 1669–1688. [Google Scholar] [CrossRef]
- Klazura, G.E.; Imy, D.A. A Description of the Initial Set of Analysis Products Available from the NEXRAD WSR-88D System. Bull. Amer. Meteor. Soc. 1993, 74, 1293–1312. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Mahale, V.N.; Putnam, B.J.; Qi, Y.; Cao, Q.; Byrd, A.D.; Bukovcic, P.; Zrnic, D.S.; Gao, J.; Xue, M.; et al. Current Status and Future Challenges of Weather Radar Polarimetry: Bridging the Gap between Radar Meteorology/Hydrology/Engineering and Numerical Weather Prediction. Adv. Atmos. Sci. 2019, 76, 571–588. [Google Scholar] [CrossRef] [Green Version]
- Westrick, K.J.; Mass, C.F.; Colle, B.A. The Limitations of the WSR-88D Radar Network for Quantitative Precipitation Measurement over the Coastal Western United States. Bull. Amer. Meteor. Soc. 1999, 80, 2289–2298. [Google Scholar] [CrossRef]
- Maddox, R.A.; Zhang, J.; Gourley, J.J.; Howard, K.W. Weather Radar Coverage over the Contiguous United States. Wea. Forecast. 2002, 17, 927–934. [Google Scholar] [CrossRef]
- Zhang, J.; Qi, Y.; Kingsmill, D.; Howard, K. Radar-Based Quantitative Precipitation Estimation for the Cool Season in Complex Terrain: Case Studies from the NOAA Hydrometeorology Testbed. J. Hydrometeor. 2012, 13, 1836–1854. [Google Scholar] [CrossRef]
- Chen, H.; Cifelli, R.; Chandrasekar, V.; Ma, Y.Z. A Flexible Bayesian Approach to Bias Correction of Radar-Derived Precipitation Estimates over Complex Terrain: Model Design and Initial Verification. J. Hydrometeor. 2019, 20, 2367–2382. [Google Scholar] [CrossRef]
- Chen, H.; Cifelli, R.; White, A.B. Improving Operational Radar Rainfall Estimates Using Profiler Observations Over Complex Terrain in Northern California. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1821–1832. [Google Scholar] [CrossRef]
- Kwon, S.; Jung, S.H.; Lee, G. Inter-comparison of radar rainfall rate using Constant Altitude Plan Position Indicator and hybrid surface rainfall maps. J. Hydrol. 2015, 531, 234–247. [Google Scholar] [CrossRef]
- Chang, P.L.; Lin, P.F.; Jou, B.J.D.; Zhang, J. An Application of Reflectivity Climatology in Constructing Radar Hybrid Scans over Complex Terrain. J. Atmos. Oceanic Technol. 2009, 26, 1315–1327. [Google Scholar] [CrossRef]
- Ye, B.Y.; Lee, G.; Park, H.M. Identification and removal of non-meteorological echoes in dual-polarization radar data based on a fuzzy logic algorithm. Adv. Atmos. Sci. 2015, 32, 1217–1230. [Google Scholar] [CrossRef]
- Yu, C.K.; Cheng, L.W. Radar Observations of Intense Orographic Precipitation Associated with Typhoon Xangsane (2000). Mon. Wea. Rev. 2008, 136, 497–521. [Google Scholar] [CrossRef] [Green Version]
- Liou, Y.C.; Chang, S.F.; Sun, J. An Application of the Immersed Boundary Method for Recovering the Three-Dimensional Wind Fields over Complex Terrain Using Multiple-Doppler Radar Data. Mon. Wea. Rev. 2012, 140, 1603–1619. [Google Scholar] [CrossRef] [Green Version]
- Tsai, C.L.; Kim, K.; Liou, Y.C.; Lee, G.; Yu, C.K. Impacts of Topography on Airflow and Precipitation in the Pyeongchang Area Seen from Multiple-Doppler Radar Observations. Mon. Wea. Rev. 2018, 146, 3401–3424. [Google Scholar] [CrossRef]
- Min, C.; Chen, S.; Gourley, J.J.; Chen, H.; Zhang, A.; Huang, Y.; Huang, C. Coverage of China New Generation Weather Radar Network. Adv. Meteorol. 2019, 2019, 5789358. [Google Scholar] [CrossRef]
- Shi, Z.; Wei, F.; Chandrasekar, V. Radar-based quantitative precipitation estimation for the identification of debris flow occurrence over earthquake-affected regions in Sichuan, China. Nat. Hazards Earth Syst. Sci. 2018, 18, 765–780. [Google Scholar] [CrossRef] [Green Version]
- Gou, Y.; Ma, Y.; Chen, H.; Wen, Y. Radar-derived quantitative precipitation estimation in complex terrain over the eastern Tibetan Plateau. Atmos. Res. 2018, 203, 286–297. [Google Scholar] [CrossRef]
- Gou, Y.; Ma, Y.; Chen, H.; Yin, J. Utilization of a C-band Polarimetric Radar for Severe Rainfall Event Analysis in Complex Terrain over Eastern China. Remote Sens. 2019, 11, 22. [Google Scholar] [CrossRef] [Green Version]
- Gray, W.R.; Seed, A.W. The characterisation of orographic rainfall. Meteor. Appl. 2000, 7, 105–119. [Google Scholar] [CrossRef]
- Talchabhadel, R.; Ghimire, G.R.; Sharma, S.; Dahal, P.; Panthi, J.; Baniya, R.; Pudashine, J.; Thapa, B.R.; Shakti, P.; Parajuli, B. Weather radar in Nepal: Opportunities and challenges in a mountainous region. Weather, 2021; early view. [Google Scholar] [CrossRef]
- Bendix, J.; Fries, A.; Zárate, J.; Trachte, K.; Rollenbeck, R.; Pucha-Cofrep, F.; Paladines, R.; Palacios, I.; Orellana, J.; Oñate-Valdivieso, F.; et al. RadarNet-Sur First Weather Radar Network in Tropical High Mountains. Bull. Amer. Meteor. Soc. 2017, 98, 1235–1254. [Google Scholar] [CrossRef]
- Rotunno, R.; Ferretti, R. Mechanisms of Intense Alpine Rainfall. J. Atmos. Sci. 2001, 58, 1732–1749. [Google Scholar] [CrossRef]
- Rotunno, R.; Houze, R.A. Lessons on orographic precipitation from the Mesoscale Alpine Programme. Q. J. R. Meteorol. Soc. 2007, 133, 811–830. [Google Scholar] [CrossRef]
- Houze, R.A., Jr. Orographic effects on precipitating clouds. Rev. Geophys. 2012, 50, 47. [Google Scholar] [CrossRef]
- Germann, U.; Joss, J. Variograms of Radar Reflectivity to Describe the Spatial Continuity of Alpine Precipitation. J. Appl. Meteor. 2001, 40, 1042–1059. [Google Scholar] [CrossRef]
- Houze, R.A., Jr.; James, C.N.; Medina, S. Radar observations of precipitation and airflow on the Mediterranean side of the Alps: Autumn 1998 and 1999. Q. J. R. Meteorol. Soc. 2001, 127, 2537–2558. [Google Scholar] [CrossRef]
- Medina, S.; Houze, R.A., Jr. Air motions and precipitation growth in alpine storms. Q. J. R. Meteorol. Soc. 2003, 129, 345–371. [Google Scholar] [CrossRef] [Green Version]
- Panziera, L.; Germann, U. The relation between airflow and orographic precipitation on the southern side of the Alps as revealed by weather radar. Q. J. R. Meteorol. Soc. 2010, 136, 222–238. [Google Scholar] [CrossRef]
- Panziera, L.; James, C.N.; Germann, U. Mesoscale organization and structure of orographic precipitation producing flash floods in the Lago Maggiore region. Q. J. R. Meteorol. Soc. 2015, 141, 224–248. [Google Scholar] [CrossRef]
- Nisi, L.; Martius, O.; Hering, A.; Kunz, M.; Germann, U. Spatial and temporal distribution of hailstorms in the Alpine region: A long-term, high resolution, radar-based analysis. Q. J. R. Meteorol. Soc. 2016, 142, 1590–1604. [Google Scholar] [CrossRef]
- Nisi, L.; Hering, A.; Germann, U.; Martius, O. A 15-year hail streak climatology for the Alpine region. Q. J. R. Meteorol. Soc. 2018, 144, 1429–1449. [Google Scholar] [CrossRef] [Green Version]
- Foresti, L.; Sideris, I.V.; Panziera, L.; Nerini, D.; Germann, U. A 10-year radar-based analysis of orographic precipitation growth and decay patterns over the Swiss Alpine region. Q. J. R. Meteorol. Soc. 2018, 144, 2277–2301. [Google Scholar] [CrossRef]
- Panziera, L.; Gabella, M.; Germann, U.; Martius, O. A 12-year radar-based climatology of daily and sub-daily extreme precipitation over the Swiss Alps. Int. J. Climatol. 2018, 38, 3749–3769. [Google Scholar] [CrossRef]
- Panziera, L.; Germann, U.; Gabella, M.; Mandapaka, P.V. NORA–Nowcasting of Orographic Rainfall by means of Analogues. Q. J. R. Meteorol. Soc. 2011, 137, 2106–2123. [Google Scholar] [CrossRef]
- Foresti, L.; Panziera, L.; Mandapaka, P.V.; Germann, U.; Seed, A. Retrieval of analogue radar images for ensemble nowcasting of orographic rainfall. Meteor. Appl. 2015, 22, 141–155. [Google Scholar] [CrossRef]
- Foresti, L.; Sideris, I.V.; Nerini, D.; Beusch, L.; Germann, U. Using a 10-Year Radar Archive for Nowcasting Precipitation Growth and Decay: A Probabilistic Machine Learning Approach. Wea. Forecast. 2019, 34, 1547–1569. [Google Scholar] [CrossRef]
- Sideris, I.V.; Foresti, L.; Nerini, D.; Germann, U. NowPrecip: Localized precipitation nowcasting in the complex terrain of Switzerland. Q. J. R. Meteorol. Soc. 2020, 146, 1768–1800. [Google Scholar] [CrossRef]
- Council, N.R. Flash Flood Forecasting over Complex Terrain: With an Assessment of the Sulphur Mountain NEXRAD in Southern California; The National Academies Press: Washington DC, USA, 2005; p. 206. [Google Scholar] [CrossRef]
- Westrelin, S.; Meriaux, P.; Tabary, P.; Aubert, Y. Hydrometeorological risks in Mediterranean mountainous areas— RHYTMME Project: Risk Management based on a Radar Network. In Proceedings of the Seventh European Conference on Radar in Meteorology and Hydrology, Toulouse, France, 24–29 June 2012; p. 6. [Google Scholar]
- Panziera, L.; Gabella, M.; Zanini, S.; Hering, A.; Germann, U.; Berne, A. A radar-based regional extreme rainfall analysis to derive the thresholds for a novel automatic alert system in Switzerland. Hydrol. Earth Syst. Sci. 2016, 20, 2317–2332. [Google Scholar] [CrossRef] [Green Version]
- Leuenberger, D.; Rossa, A. Revisiting the latent heat nudging scheme for the rainfall assimilation of a simulated convective storm. Meteor. Atmos. Phys. 2004, 98, 195–215. [Google Scholar] [CrossRef]
- Borga, M.; Anagnostou, E.N.; Frank, E. On the use of real-time radar rainfall estimates for flood prediction in mountainous basins. J. Geophys. Res. Atmos. 2000, 105, 2269–2280. [Google Scholar] [CrossRef]
- Berenguer, M.; Corral, C.; Sánchez-Diezma, R.; Sempere-Torres, D. Hydrological Validation of a Radar-Based Nowcasting Technique. J. Hydrometeor. 2005, 6, 532–549. [Google Scholar] [CrossRef] [Green Version]
- Zappa, M.; Jaun, S.; Germann, U.; Walser, A.; Fundel, F. Superposition of three sources of uncertainties in operational flood forecasting chains. Atmos. Res. 2011, 100, 246–262. [Google Scholar] [CrossRef]
- Rossa, A.; Liechti, K.; Zappa, M.; Bruen, M.; Germann, U.; Haase, G.; Keil, C.; Krahe, P. The COST 731 Action: A review on uncertainty propagation in advanced hydro-meteorological forecast systems. Atmos. Res. 2011, 100, 150–167. [Google Scholar] [CrossRef]
- Liechti, K.; Zappa, M.; Fundel, F.; Germann, U. Probabilistic evaluation of ensemble discharge nowcasts in two nested Alpine basins prone to flash floods. Hydrol. Process. 2013, 27, 5–17. [Google Scholar] [CrossRef]
- Binder, P. MAP—Mesoscale Alpine Programme Design Proposal. NOAA Tech. Rep. ERL402-NHELM2, MeteoSwiss, 1996. Available online: http://iacweb.ethz.ch/doc/publications/1996_BinderSchar_MAP_DP.pdf (accessed on 14 December 2021).
- Rotach, M.W.; Ambrosetti, P.; Appenzeller, F.A.C.; Arpagaus, M.; Behrendt, H.B.A.; Bouttier, F.; Buzzi, A.; Corazza, M.; Davolio, S.; Denhard, M.; et al. MAP D-PHASE: Real-Time Demonstration of Weather Forecast Quality in the Alpine Region. Bull. Amer. Meteor. Soc. 2009, 90, 1321–1336. [Google Scholar] [CrossRef] [Green Version]
- Savina, M. The Use of a Cost-Effective X-Band Weather Radar in Alpine Region. Ph.D. Thesis, ETH Zurich, Zurich, Germany, 2011. [Google Scholar] [CrossRef]
- Wulfmeyer, V.; Behrendt, A.; Kottmeier, C.; Corsmeier, U.; Barthlott, C.; Craig, G.C.; Hagen, M.; Althausen, D.; Aoshima, F.; Arpagaus, M.; et al. The Convective and Orographically-induced Precipitation Study (COPS): The scientific strategy, the field phase, and research highlights. Q. J. R. Meteorol. Soc. 2011, 137, 3–30. [Google Scholar] [CrossRef]
- Mandapaka, P.V.; Germann, U.; Panziera, L. Diurnal cycle of precipitation over complex Alpine orography: Inferences from high-resolution radar observations. Q. J. R. Meteorol. Soc. 2013, 139, 1025–1046. [Google Scholar] [CrossRef]
- Mott, R.; Scipión, D.; Schneebeli, M.; Dawes, N.; Berne, A.; Lehning, M. Orographic effects on snow deposition patterns in mountainous terrain. J. Geophys. Res. Atmos. 2014, 119, 1419–1439. [Google Scholar] [CrossRef] [Green Version]
- Trefalt, S.; Martynov, A.; Barras, H.; Besic, N.; Hering, A.M.; Lenggenhager, S.; Noti, P.; Rötlisberger, M.; Schemm, S.; Germann, U.; et al. A severe hail storm in complex topography in Switzerland— Observations and processes. Atmos. Res. 2018, 209, 78–94. [Google Scholar] [CrossRef] [Green Version]
- i Ventura, J.F.; Pineda, N.; Besic, N.; Grazioli, J.; Hering, A.; Van Der Velde, O.A.; Romero, D.; Sunjerga, A.; Mostajabi, A.; Azadifar, M.; et al. Analysis of the lightning production of convective cells. Atmos. Meas. Tech. 2019, 12, 5573–5591. [Google Scholar] [CrossRef] [Green Version]
- Boettcher, M.; Schäfler, A.; Sprenger, M.; Sodemann, H.; Kaufmann, S.; Voigt, C.; Schlager, H.; Summa, D.; Di Girolamo, P.; Nerini, D.; et al. Lagrangian matches between observations from aircraft, lidar and radar in a warm conveyor belt crossing orography. Atmos. Chem. Phys. 2021, 21, 5477–5498. [Google Scholar] [CrossRef]
- Martius, O.; Hering, A.; Kunz, M.; Manzato, A.; Mohr, S.; Nisi, L.; Trefalt, S. Challenges and Recent Advances in Hail Research. Bull. Am. Meteorol. Soc. 2018, 99, ES51–ES54. [Google Scholar] [CrossRef] [Green Version]
- Barton, Y.; Sideris, I.V.; Raupach, T.H.; Gabella, M.; Germann, U.; Martius, O. A multi-year assessment of sub-hourly gridded precipitation for Switzerland based on a blended radar—Rain-gauge dataset. Int. J. Climatol. 2020, 40, 5208–5222. [Google Scholar] [CrossRef]
- Nisi, L.; Hering, A.; Germann, U.; Schroeer, K.; Barras, H.; Kunz, M.; Martius, O. Hailstorms in the Alpine region: Diurnal cycle, 4D-characteristics, and the nowcasting potential of lightning properties. Q. J. R. Meteorol. Soc. 2020, 146, 4170–4194. [Google Scholar] [CrossRef]
- Fluck, E.; Kunz, M.; Geissbuehler, P.; Ritz, S.P. Radar-based assessment of hail frequency in Europe. Nat. Hazards Earth Syst. Sci. 2021, 21, 683–701. [Google Scholar] [CrossRef]
- Germann, U.; Zanini, S. Condizioni meteorologiche estreme. In L’alluvione del ’78: Testimonianze e Riflessioni; Museo di valmaggia, Ed.; Armando Dadò Editore: Locarno, Switzerland, 2020; pp. 57–68. [Google Scholar]
- Gabella, M.; Mantovani, R. The floods of 13–16 October 2000 in Piedmont (Italy): Quantitative precipitation estimates using radar and a network of gauges. Weather 2001, 56, 337–351. [Google Scholar] [CrossRef]
- Marra, F.; Nikolopoulos, E.I.; Creutin, J.D.; Borga, M. Radar rainfall estimation for the identification of debris-flow occurrence thresholds. J. Hydrol. 2014, 519, 1607–1619. [Google Scholar] [CrossRef]
- Nerini, D.; Foresti, L.; Leuenberger, D.; Robert, S.; Germann, U. A Reduced-Space Ensemble Kalman Filter Approach for Flow-Dependent Integration of Radar Extrapolation Nowcasts and NWP Precipitation Ensembles. Mon. Wea. Rev. 2019, 147, 987–1006. [Google Scholar] [CrossRef]
- Nerini, D. Ensemble Precipitation Nowcasting: Limits to Prediction, Localization and Seamless Blending. Ph.D. Thesis, ETH Zurich, Zurich, Germany, 2019. [Google Scholar] [CrossRef]
- Mandapaka, P.V.; Germann, U.; Panziera, L.; Hering, A. Can Lagrangian Extrapolation of Radar Fields Be Used for Precipitation Nowcasting over Complex Alpine Orography? Wea. Forecast. 2012, 27, 28–49. [Google Scholar] [CrossRef]
- Pulkkinen, S.; Nerini, D.; Pérez Hortal, A.A.; Velasco-Forero, C.; Seed, A.; Germann, U.; Foresti, L. Pysteps: An open-source Python library for probabilistic precipitation nowcasting (v1.0). Geosci. Model Dev. 2019, 12, 4185–4219. [Google Scholar] [CrossRef] [Green Version]
- Gabella, M.; Joss, J.; Perona, G.; Galli, G. Accuracy of rainfall estimates by two radars in the same Alpine environment using gauge adjustment. J. Geophys. Res. 2001, 106, 5139–5150. [Google Scholar] [CrossRef] [Green Version]
- Sideris, I.V.; Gabella, M.; Erdin, R.; Germann, U. Real-time radar–rain-gauge merging using spatio-temporal co-kriging with external drift in the alpine terrain of Switzerland. Q. J. R. Meteorol. Soc. 2014, 140, 1097–1111. [Google Scholar] [CrossRef]
- Gabella, M.; Panziera, L.; Sideris, I.; Boscacci, M.; Wolfensberger, D.; Clementi, L.; Germann, U. Twelve years of operational real-time hourly precipitation estimation in the Alps: Better performance of the radar-only and radar-gauge products in recent years. In Proceedings of the 11th International Workshop on Precipitation in Urban Areas, Pontresina, Switzerland, 5–7 December 2018; p. 5. [Google Scholar]
- Barton, Y.; Sideris, I.V.; Germann, U.; Martius, O. A method for real-time temporal disaggregation of blended radar-rain gauge precipitation fields. Meteor. Appl. 2020, 27, 14. [Google Scholar] [CrossRef] [Green Version]
- Hering, A.M.; Morel, C.; Galli, G.; Sénési, S.; Ambrosetti, P.; Boscacci, M. Nowcasting thunderstorms in the Alpine region using a radar based adaptive thresholding scheme. In Proceedings of the 3th European Conference on Radar in Meteorology and Hydrology, Gotland, Sweden, 6–10 September 2004; Copernicus: Gottingen, Germany, 2004; pp. 206–211. [Google Scholar]
- Hering, A.M.; Germann, U.; Boscacci, M.; Sénési, S. Operational nowcasting of thunderstorms in the Alps during MAP D-PHASE. In Proceedings of the 5th European Conference on Radar in Meteorology and Hydrology, Helsinki, Finland, 30 June–4 July 2008; Copernicus: Gottingen, Germany, 2008; p. 5. [Google Scholar]
- Hering, A.M.; Nisi, L.; Bruna, G.D.; Gaia, M.; Nerini, D.; Ambrosetti, P.; Hamann, U.; Trefalt, S.; Germann, U. Fully automated thunderstorm warnings and operational nowcasting at MeteoSwiss. In Proceedings of the European Conference on Severe Storms, Wiener Neustadt, Austria, 14–18 September 2015; p. 3. [Google Scholar]
- Grazioli, J.; Leuenberger, A.; Peyraud, L.; i Ventura, J.F.; Gabella, M.; Hering, A.; Germann, U. Adaptive thunderstorm measurements using C-band and X-band radar data. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1673–1677. [Google Scholar] [CrossRef]
- Hirschi, E.; Hering, A.; Germann, U. Damage limitation—A short-term hail warning system. Meteorological Technology International, 15 November 2019; pp. 66–69. [Google Scholar]
- Barras, H.; Hering, A.; Martynov, A.; Noti, P.A.; Germann, U.; Martius, O. Experiences with >50,000 Crowdsourced Hail Reports in Switzerland. Bull. Amer. Meteor. Soc. 2019, 100, 1429–1440. [Google Scholar] [CrossRef]
- Besic, N.; i Ventura, J.F.; Grazioli, J.; Gabella, M.; Germann, U.; Berne, A. Hydrometeor classification through statistical clustering of polarimetric radar measurements: A semi-supervised approach. Atmos. Meas. Tech. 2016, 9, 4425–4445. [Google Scholar] [CrossRef] [Green Version]
- Besic, N.; Gehring, J.; Praz, C.; i Ventura, J.F.; Grazioli, J.; Gabella, M.; Germann, U.; Berne, A. Unraveling hydrometeor mixtures in polarimetric radar measurements. Atmos. Meas. Tech. 2018, 11, 4847–4866. [Google Scholar] [CrossRef] [Green Version]
- Germann, U. Vertical wind profile by Doppler radars. In Mesoscale Alpine Programme (MAP) Newsletters; MeteoSwiss: Locarno-Monti, Switzerland, 1999. [Google Scholar]
- Tabary, P.; Scialom, G.; Germann, U. Real-Time Retrieval of the Wind from Aliased Velocities Measured by Doppler Radars. J. Atmos. Oceanic Technol. 2001, 18, 875–882. [Google Scholar] [CrossRef]
- Feldmann, M.; James, C.N.; Boscacci, M.; Leuenberger, D.; Gabella, M.; Germann, U.; Wolfensberger, D.; Berne, A. R2D2: A Region-Based Recursive Doppler Dealiasing Algorithm for Operational Weather Radar. J. Atmos. Ocean. Technol. 2020, 37, 2341–2356. [Google Scholar] [CrossRef]
- Feldmann, M.; Germann, U.; Gabella, M.; Berne, A. A Characterisation of Alpine Mesocyclone Occurrence. Weather. Clim. Dyn. Discuss. 2021, 2, 1225–1244. [Google Scholar] [CrossRef]
- Leuenberger, D. High-Resolution Radar Rainfall Assimilation: Exploratory Studies with Latent Heat Nudging. Ph.D. Thesis, ETH Zurich, Zurich, Germany, 2005. [Google Scholar] [CrossRef]
- i Ventura, J.F.; Lainer, M.; Schauwecker, Z.; Grazioli, J.; Germann, U. Pyrad: A Real-Time Weather Radar Data Processing Framework Based on Py-ART. J. Open Res. Softw. 2020, 8, 28. [Google Scholar] [CrossRef]
- Leinonen, J.; Hamann, U.; Germann, U.; Mecikalski, J.R. Nowcasting thunderstorm hazards using machine learning: The impact of data sources on performance. Nat. Hazards Earth Syst. Sci. Discuss. 2021, 2021, 1–28. [Google Scholar] [CrossRef]
- Wolfensberger, D.; Gabella, M.; Boscacci, M.; Germann, U.; Berne, A. RainForest: A random forest algorithm for quantitative precipitation estimation over Switzerland. Atmos. Meas. Tech. 2021, 14, 3169–3193. [Google Scholar] [CrossRef]
- Liechti, K.; Fundel, F.; Germann, U.; Zappa, M. Flood nowcasting in the Southern Swiss Alps using radar ensemble. IAHS Publ. 2012, 351, 496–501. [Google Scholar]
- Gabella, M.; Leuenberger, A. Dual-Polarization Observations of Slowly Varying Solar Emissions from a Mobile X-Band Radar. Sensors 2017, 17, 1185. [Google Scholar] [CrossRef] [Green Version]
- Gabella, M.; Boscacci, M.; Sartori, M.; Germann, U. Calibration Accuracy of the Dual-Polarization Receivers of the C-Band Swiss Weather Radar Network. Atmosphere 2016, 7, 76. [Google Scholar] [CrossRef] [Green Version]
- World Meteorological Organization. Guide to Instruments and Methods of Observations: Volume III— Observing Systems. Technical Report WMO-No. 8, World Meteorological Organization, 7 bis, avenue de la Paix, CH-1211 Geneva 2, Switzerland. 2018. Available online: https://library.wmo.int (accessed on 14 December 2021).
- Delrieu, G.; Creutin, J.D.; Andrieu, H. Simulation of Radar Mountain Returns Using a Digitized Terrain Model. J. Atmos. Oceanic Technol. 1995, 12, 1038–1049. [Google Scholar] [CrossRef] [Green Version]
- Gabella, M.; Perona, G. Simulation of the Orographic Influence on Weather Radar Using a Geometric-Optics Approach. J. Atmos. Oceanic Technol. 1998, 15, 1485–1494. [Google Scholar] [CrossRef]
- Friedrich, K.; Germann, U.; Tabary, P. Influence of Ground Clutter Contamination on Polarimetric Radar Parameters. J. Atmos. Oceanic Technol. 2009, 26, 251–269. [Google Scholar] [CrossRef] [Green Version]
- Pellarin, T.; Delrieu, G.; Saulnier, G.M.; Andrieu, H.; Vignal, B.; Creutin, J.D. Hydrologic Visibility of Weather Radar Systems Operating in Mountainous Regions: Case Study for the Ardèche Catchment (France). J. Hydrometeor. 2002, 3, 539–555. [Google Scholar] [CrossRef]
- Bech, J.; Gjertsen, U.; Haase, G. Modelling weather radar beam propagation and topographical blockage at northern high latitudes. Q. J. R. Meteorol. Soc. 2007, 133, 1191–1204. [Google Scholar] [CrossRef]
- Ryzhkov, A.V.; Zrnic, D.S. Radar Polymetry for Weather Observations; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Zrnic, D.S.; Ryzhkov, A.V. Advantages of rain measurements using specific differential phase. J. Atmos. Oceanic Technol. 1996, 13, 454–464. [Google Scholar] [CrossRef] [Green Version]
- Vivekanandan, J.; Yates, D.N.; Brandes, E.A. The Influence of Terrain on Rainfall Estimates from Radar Reflectivity and Specific Propagation Phase Observations. J. Atmos. Oceanic Technol. 1999, 16, 837–845. [Google Scholar] [CrossRef]
- Friedrich, K.; Germann, U.; Gourley, J.J.; Tabary, P. Effects of Radar Beam Shielding on Rainfall Estimation for the Polarimetric C-Band Radar. J. Atmos. Oceanic Technol. 2007, 24, 1839–1859. [Google Scholar] [CrossRef] [Green Version]
- Thompson, R.; Illingworth, A.; Ovens, J. Emission: A simple new technique to correct rainfall estimates from attenuation due to both radome and heavy rainfall. Weather. Radar Hydrol. 2012, 351, 39–44. [Google Scholar]
- Germann, U.; Joss, J. Mesobeta Profiles to Extrapolate Radar Precipitation Measurements above the Alp. J. Appl. Meteor. 2002, 41, 542–557. [Google Scholar] [CrossRef]
- Lee, G.W.; Zawadzki, I. Variability of Drop Size Distributions: Time-Scale Dependence of the Variability and Its Effects on Rain Estimation. J. Appl. Meteor. 2005, 44, 241–255. [Google Scholar] [CrossRef]
- Gugerli, R.; Gabella, M.; Huss, M.; Salzmann, N. Can Weather Radars Be Used to Estimate Snow Accumulation on Alpine Glaciers? An Evaluation Based on Glaciological Surveys. J. Hydrometeor. 2020, 21, 2943–2962. [Google Scholar] [CrossRef]
- Capozzi, V.; Montopoli, M.; Bracci, A.; Adirosi, E.; Baldini, L.; Vulpiani, G.; Budillon, G. Retrieval of snow precipitation rate from polarimetric X-band radar measurements in Southern Italy Apennine mountains. Atmos. Res. 2020, 236, 104796. [Google Scholar] [CrossRef]
- Germann, U. Radome attenuation—A serious limiting factor for quantitative radar measurements? Meteor. Z. 1999, 8, 85–90. [Google Scholar] [CrossRef]
- Kurri, M.; Huuskonen, A. Measurements of the Transmission Loss of a Radome at Different Rain Intensities. J. Atmos. Oceanic Technol. 2008, 25, 1590–1599. [Google Scholar] [CrossRef]
- Frasier, S.J.; Kabeche, F.; Ventura, J.F.; Al-Sakka, H.; Tabary, P.; Beck, J.; Bousquet, O. In-Place Estimation of Wet Radome Attenuation at X Band. J. Atmos. Oceanic Technol. 2013, 30, 917–928. [Google Scholar] [CrossRef]
- Kucera, P.A.; Krajewski, W.F.; Young, C.B. Radar Beam Occultation Studies Using GIS and DEM Technology: An Example Study of Guam. J. Atmos. Oceanic Technol. 2004, 21, 995–1006. [Google Scholar] [CrossRef] [Green Version]
- Khanal, A.K.; Delrieu, G.; Cazenave, F.; Boudevillain, B. Radar Remote Sensing of Precipitation in High Mountains: Detection and Characterization of Melting Layer in the Grenoble Valley, French Alps. Atmosphere 2019, 10, 784. [Google Scholar] [CrossRef] [Green Version]
- den Heuvel, F.V.; Gabella, M.; Germann, U.; Berne, A. Characterisation of the melting layer variability in an Alpine valley based on polarimetric X-band radar scans. Atmos. Meas. Tech. 2018, 11, 5181–5198. [Google Scholar] [CrossRef] [Green Version]
- Gabella, M.; Sartori, M.; Progin, O.; Germann, U. Acceptance tests and monitoring of the next generation polarimetric weather radar network in Switzerland. In Proceedings of the 2013 International Conference on Electromagnetics in Advanced Applications (ICEAA), Turin, Italy, 9–13 September 2013. [Google Scholar]
- Saltikoff, E.; Kurri, M.; Leijnse, H.; Barbosa, S.; Stiansen, K. Maintenance Keeps Radars Running. Bull. Amer. Meteor. Soc. 2017, 98, 1833–1840. [Google Scholar] [CrossRef]
- Scipión, D.E.; Mott, R.; Lehning, M.; Schneebeli, M.; Berne, A. Seasonal small-scale spatial variability in alpine snowfall and snow accumulation. Wat. Resour. Res. 2013, 49, 1446–1457. [Google Scholar] [CrossRef] [Green Version]
- Allegretti, M.; Bertoldo, S.; Prato, A.; Lucianaz, C.; Rorato, O.; Notarpietro, R.; Gabella, M. X-Band Mini Radar for Observing and Monitoring Rainfall Events. Atmos. Clim. Sci. 2012, 2, 290–297. [Google Scholar] [CrossRef]
- Vollbracht, D.; Sartori, M.; Gabella, M. Absolute dual-polarization radar calibration: Temperature dependence and stability with focus on antenna-mounted receivers and Noise Source-generated reference signal. In Proceedings of the 8th European Conference on Radar in Meteorology and Hydrology, Garmisch-Partenkirchen, Germany, 1–5 September 2014; pp. 111–122. [Google Scholar]
- Vollbracht, D.; Ridene, D.; Gekat, F. Receiver over Elevation (ROEL) Weather Radar System Design and its Advantages. In Proceedings of the 12th URSI Commission F Triennial Open Symposium on Wave Propagation and Remote Sensing, Garmisch-Partenkirchen, Germany, 8–11 March 2011. [Google Scholar]
- Vaccarono, M.; Bechini, R.; Chandrasekar, C.V.; Cremonini, R.; Cassardo, C. An integrated approach to monitoring the calibration stability of operational dual-polarization radars. Atmos. Meas. Tech. 2016, 9, 5367–5383. [Google Scholar] [CrossRef] [Green Version]
- Frech, M.; Hubbert, J. Monitoring the differential reflectivity and receiver calibration of the German polarimetric weather radar network. Atmos. Meas. Tech. 2020, 13, 1051–1069. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Chandrasekar, V. Quantitative Precipitation Estimation in the CASA X-band Dual-Polarization Radar Network. J. Atmos. Oceanic Technol. 2010, 27, 1665–1676. [Google Scholar] [CrossRef]
- Hollemann, I.; Huuskonen, A.; Kurri, M.; Beekhuis, H. Operational Monitoring of Weather Radar Receiving Chain Using the Sun. J. Atmos. Oceanic Technol. 2010, 27, 159–166. [Google Scholar] [CrossRef]
- Holleman, I.; Huuskonen, A.; Gill, R.; Tabary, P. Operational Monitoring of Radar Differential Reflectivity Using the Sun. J. Atmos. Oceanic Technol. 2010, 27, 881–887. [Google Scholar] [CrossRef]
- Gabella, M.; Sartori, M.; Boscacci, M.; Germann, U. Vertical and horizontal polarization observations of slowly varying solar emissions from operational Swiss weather radars. Atmosphere 2015, 6, 50–59. [Google Scholar] [CrossRef] [Green Version]
- Gabella, M. On the Spectral and Polarimetric Signatures of a Bright Scatterer before and after Hardware Replacement. Remote Sens. 2021, 13, 919. [Google Scholar] [CrossRef]
- i Ventura, J.F.; Boumahmoud, A.A.; Fradon, B.; Dupuy, P.; Tabary, P. Long-term monitoring of French polarimetric radar data quality and evaluation of several polarimetric quantitative precipitation estimators in ideal conditions for operational implementation at C-band. Q. J. R. Meteorol. Soc. 2012, 138, 2212–2228. [Google Scholar] [CrossRef]
- i Ventura, J.F.; Boscacci, M.; Clementi, L.; Sideris, I.V.; Gabella, M.; Germann, U. Rad4Alp, The new Swiss Doppler Polarimetric Weather Radar Network: Data Quality and First Results. In Proceedings of the 36th Conference on Radar Meteorology, Breckenridge, CO, USA, 16–20 September 2013; p. 5. [Google Scholar]
- Siggia, A.D.; Passarelli, R.E. Gaussian model adaptive processing (GMAP) for improved ground clutter cancellation and moment calculation. In Proceedings of the Third European Conference on Radar in Meteorology and Hydrology ERAD, Visby, Sweden, 6–10 September 2004; 2004; pp. 67–73. [Google Scholar]
- Nguyen, C.M.; Chandrasekar, V. Gaussian Model Adaptive Processing in Time Domain (GMAP-TD) for Weather Radars. J. Atmos. Oceanic Technol. 2013, 30, 2571–2584. [Google Scholar] [CrossRef]
- Hubbert, J.C.; Meymaris, G.; Romatschke, U.; Dixon, M. Using a Regression Ground Clutter Filter to Improve Weather Radar Signal Statistics: Theory and Simulations. J. Atmos. Oceanic Technol. 2021, 38, 1353–1375. [Google Scholar] [CrossRef]
- Gourley, J.J.; Tabary, P.; du Chatelet, J.P. A Fuzzy Logic Algorithm for the Separation of Precipitating from Nonprecipitating Echoes Using Polarimetric Radar Observations. J. Atmos. Oceanic Technol. 2007, 24, 1439–1451. [Google Scholar] [CrossRef]
- Berenguer, M.; Sempere-Torres, D.; Corral, C.; Sánchez-Diezma, R. A Fuzzy Logic Technique for Identifying Nonprecipitating Echoes in Radar Scans. J. Atmos. Oceanic Technol. 2006, 23, 1157–1180. [Google Scholar] [CrossRef] [Green Version]
- Germann, U. Spatial Continuity of Precipitation, Profiles of Radar Reflectivity and Precipitation Measurements in the Alps. Ph.D. Thesis, ETH Zurich, Zurich, Germany, 2000. [Google Scholar] [CrossRef]
- Germann, U.; Joss, J. Operational measurement of precipitation in mountainous terrain. In Weather Radar: Principles and Advanced Applications; Meischner, P., Ed.; Springer: Berlin/Heidelberg, Germany, 2004; pp. 52–77. [Google Scholar]
- Vignal, B.; Galli, G.; Joss, J.; Germann, U. Three Methods to Determine Profiles of Reflectivity from Volumetric Radar Data to Correct Precipitation Estimates. J. Appl. Meteor. 2000, 39, 1715–1726. [Google Scholar] [CrossRef]
- Franco, M.; Sánchez-Diezma, R.; Sempere-Torres, D. Improvements in weather radar rain rate estimates using a method for identifying the vertical profile of reflectivity from volume radar scans. Meteor. Z. 2006, 15, 521–536. [Google Scholar] [CrossRef]
- Villarini, G.; Mandapaka, P.V.; Krajewski, W.F.; Moore, R.J. Rainfall and sampling uncertainties: A rain gauge perspective. J. Geophys. Res. Atmos. 2008, 113, 12. [Google Scholar] [CrossRef]
- Goudenhoofdt, E.; Delobbe, L. Evaluation of radar-gauge merging methods for quantitative precipitation estimates. Hydrol. Earth Syst. Sci. 2009, 13, 195–203. [Google Scholar] [CrossRef] [Green Version]
- Tabary, P.; Boumahmoud, A.A.; Andrieu, H.; Thompson, R.J.; Illingworth, A.J.; Bouar, E.L.; Testud, J. Evaluation of two “integrated” polarimetric Quantitative Precipitation Estimation (QPE) algorithms at C-band. J. Hydrol. 2011, 405, 248–260. [Google Scholar] [CrossRef]
- Gugerli, R.; Guidicelli, M.; Gabella, M.; Huss, M.; Salzmann, N. Multi-sensor analysis of monthly gridded snow precipitation on alpine glaciers. Adv. Sci. Res. 2021, 18, 7–20. [Google Scholar] [CrossRef]
- Guidicelli, M.; Gugerli, R.; Gabella, M.; Marty, C.; Salzmann, N. Continuous Spatio-Temporal High-Resolution Estimtaes of SWE Across the Swiss Alps—A Statistical Two-Step Approach for High-Mountain Topography. Front. Earth Sci. 2021, 9, 664648. [Google Scholar] [CrossRef]
- Gabella, M.; Speirs, P.; Hamann, U.; Germann, U.; Berne, A. Measurement of Precipitation in the Alps Using Dual-Polarization C-Band Ground-Based Radars, the GPM Spaceborne Ku-Band Radar, and Rain Gauges. Remote Sens. 2017, 9, 1147. [Google Scholar] [CrossRef] [Green Version]
- Speirs, P.; Gabella, M.; Berne, A. A Comparison between the GPM Dual-Frequency Precipitation Radar and Ground-Based Radar Precipitation Rate Estimates in the Swiss Alps and Plateau. J. Hydrometeor. 2017, 18, 1247–1269. [Google Scholar] [CrossRef]
- Nisi, L.; Ambrosetti, P.; Clementi, L. Nowcasting severe convection in the Alpine region: The COALITION approach. Q. J. R. Meteorol. Soc. 2014, 140, 1684–1699. [Google Scholar] [CrossRef]
- Germann, U.; Zawadzki, I. Scale-Dependence of the Predictability of Precipitation from Continental Radar Images. Part I: Description of the Methodology. Mon. Wea. Rev. 2002, 130, 2859–2873. [Google Scholar] [CrossRef]
- Seed, A.W. A Dynamic and Spatial Scaling Approach to Advection Forecasting. J. Appl. Meteor. 2003, 42, 381–388. [Google Scholar] [CrossRef]
- Bowler, N.E.; Pierce, C.E.; Seed, A.W. STEPS: A probabilistic precipitation forecasting scheme which merges an extrapolation nowcast with downscaled NWP. Q. J. R. Meteorol. Soc. 2006, 132, 2127–2155. [Google Scholar] [CrossRef]
- Mandapaka, P.V.; Krajewski, W.F.; Ciach, G.J.; Villarini, G.; Smith, J.A. Estimation of radar-rainfall error spatial correlation. Ad. Water Resour. 2009, 32, 1020–1030. [Google Scholar] [CrossRef]
- Bellon, A.; Lee, G.W.; Zawadzki, I. Error Statistics of VPR Corrections in Stratiform Precipitation. J. Appl. Meteor. 2005, 44, 998–1015. [Google Scholar] [CrossRef] [Green Version]
- Germann, U.; Berenguer, M.; Sempere-Torres, D.; Zappa, M. REAL—Ensemble radar precipitation estimation for hydrology in a mountainous region. Q. J. R. Meteorol. Soc. 2009, 135, 445–456. [Google Scholar] [CrossRef] [Green Version]
- Mandapaka, P.V.; Germann, U. Radar-Rainfall Error Models and Ensemble Generators. In Rainfall: State of Science; Testik, F., Gebremichael, M., Eds.; American Geophysical Union: Washington, DC, USA, 2010; pp. 247–264. [Google Scholar] [CrossRef] [Green Version]
- Federer, B.; Waldvogel, A.; Schmid, W.; Schiesser, H.H.; Hampel, F.; Schweingruber, M.; Stahel, W.; Bader, J.; Mezeix, J.F.; Doras, N.; et al. Main results of Grossversuch IV. J. Appl. Meteor. Climatol. 1986, 25, 917–957. [Google Scholar] [CrossRef] [Green Version]
- Ravuri, S.; Lenc, K.; Willson, M.; Kangin, D.; Lam, R.; Mirowski, P.; Fitzsimons, M.; Athanassiadou, M.; Kashem, S.; Madge, S.; et al. Skilful precipitation nowcasting using deep generative models of radar. Nature 2021, 597, 672–677. [Google Scholar] [CrossRef]




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Germann, U.; Boscacci, M.; Clementi, L.; Gabella, M.; Hering, A.; Sartori, M.; Sideris, I.V.; Calpini, B. Weather Radar in Complex Orography. Remote Sens. 2022, 14, 503. https://doi.org/10.3390/rs14030503
Germann U, Boscacci M, Clementi L, Gabella M, Hering A, Sartori M, Sideris IV, Calpini B. Weather Radar in Complex Orography. Remote Sensing. 2022; 14(3):503. https://doi.org/10.3390/rs14030503
Chicago/Turabian StyleGermann, Urs, Marco Boscacci, Lorenzo Clementi, Marco Gabella, Alessandro Hering, Maurizio Sartori, Ioannis V. Sideris, and Bertrand Calpini. 2022. "Weather Radar in Complex Orography" Remote Sensing 14, no. 3: 503. https://doi.org/10.3390/rs14030503