
Spectral Comparison of UAV-Based Hyper and Multispectral Cameras for Precision Viticulture

 ,
,  ,
,  , ,
, , 
Abstract
:
1. Introduction
2. Materials and Methods
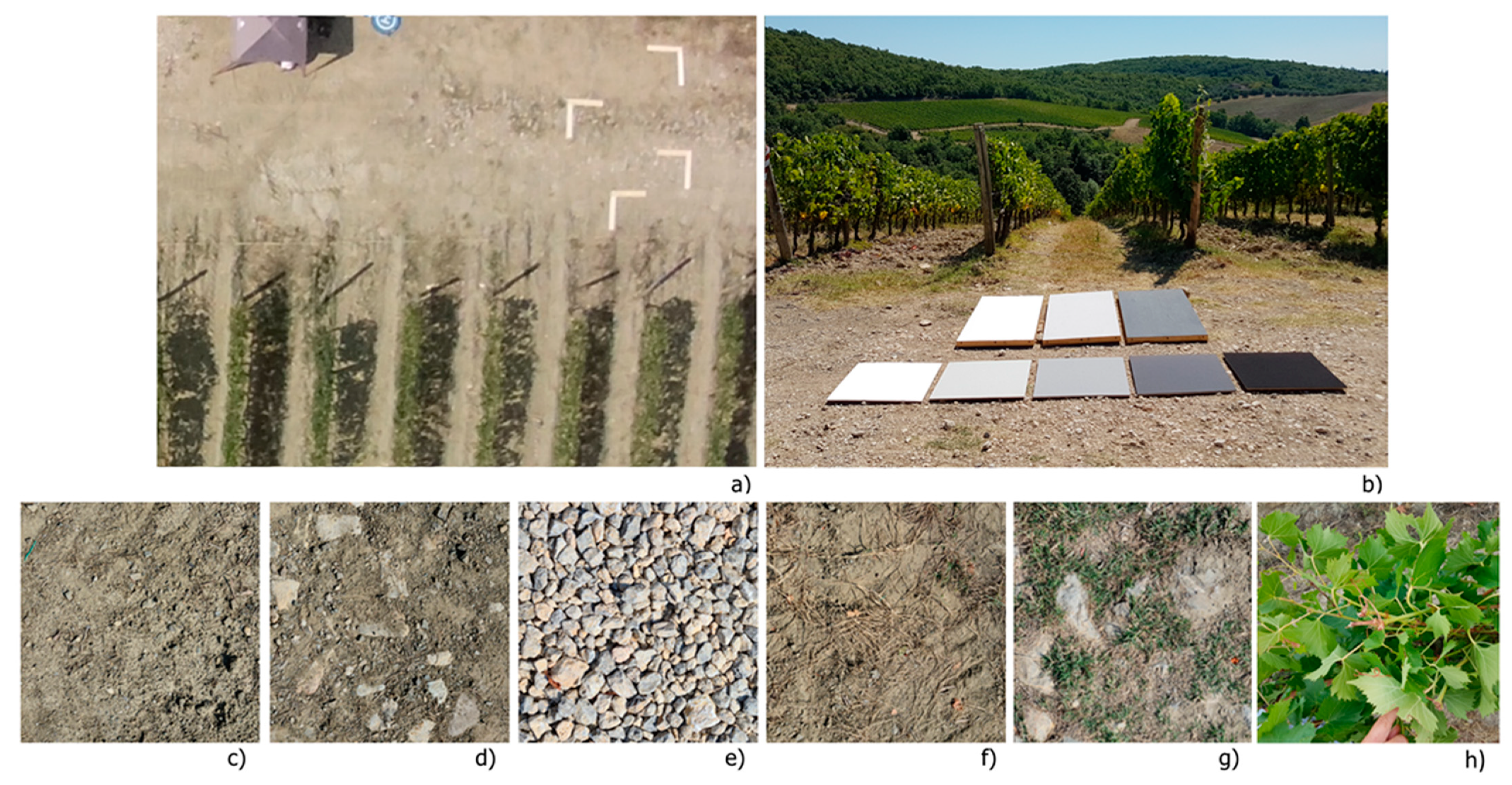
2.1. Study Area
2.2. Hardware Description
2.3. Data Acquisition
2.4. Target Characterization and Reference Reflectance Panels
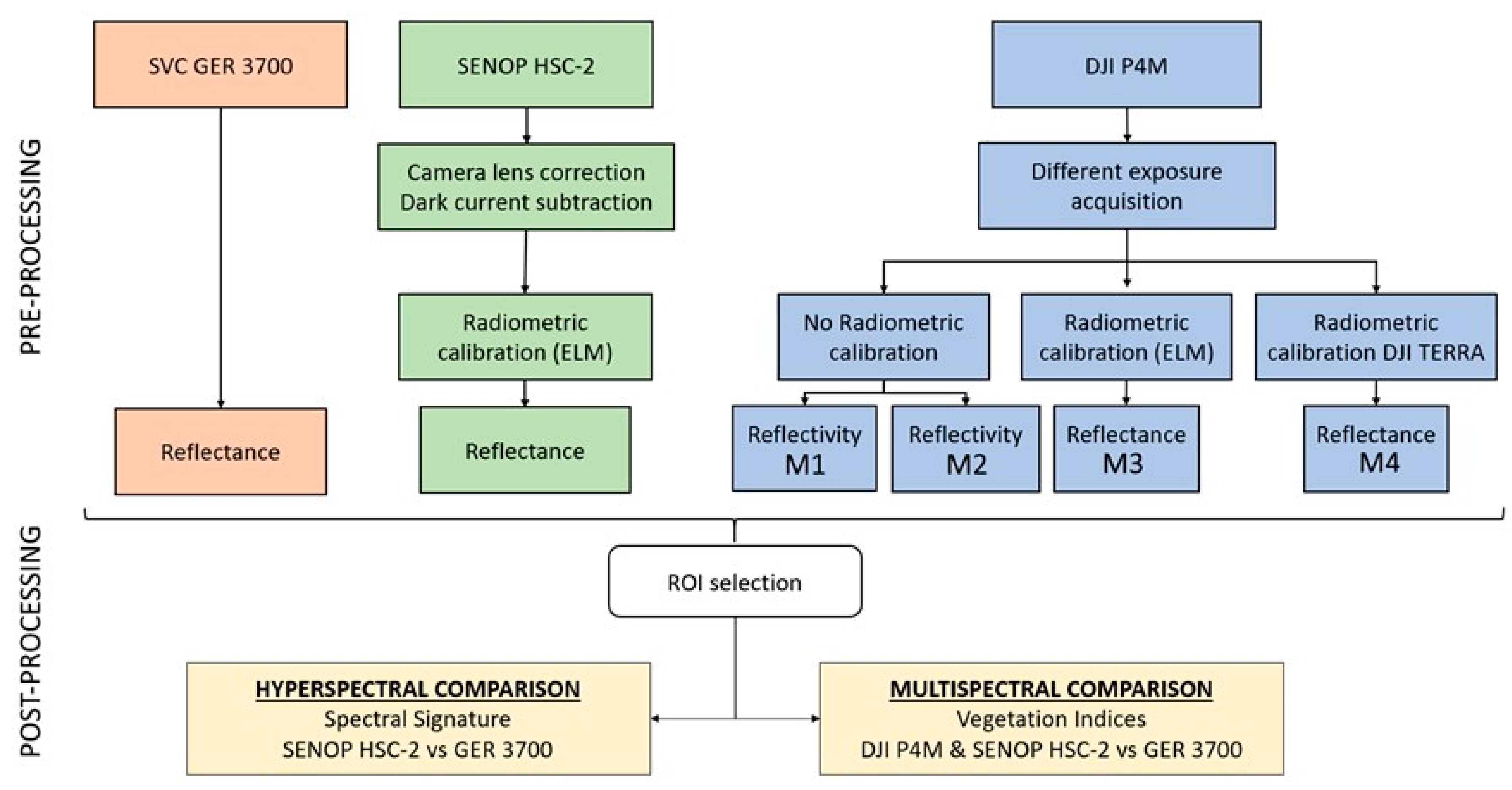
2.5. Image Pre-Processing
- M1, spectral comparison performed with DN values from the orthomosaic generated using DJI Terra software v. 1.0 without any calibration step;
- M2, spectral comparison performed with DN values from the orthomosaic generated using DJI Terra software v. 2.0 without any calibration step;
- M3, spectral comparison performed with reflectance values, obtained pre-processing the DN values from the orthomosaic generated using DJI Terra software v. 1.0, applying an empirical line method on each band (blue, green, red, red edge and nir) based on the eight reference reflectance panels;
- M4, spectral comparison performed with reflectance values, obtained pre-processing the DN values of each image by means of the new radiometric calibration tool added to the DJI Terra software v. 2.0, which allows calibration parameters to be extracted uploading images with reference panels.
2.6. Hyperspectral Comparison
2.7. Multispectral Comparison
3. Results
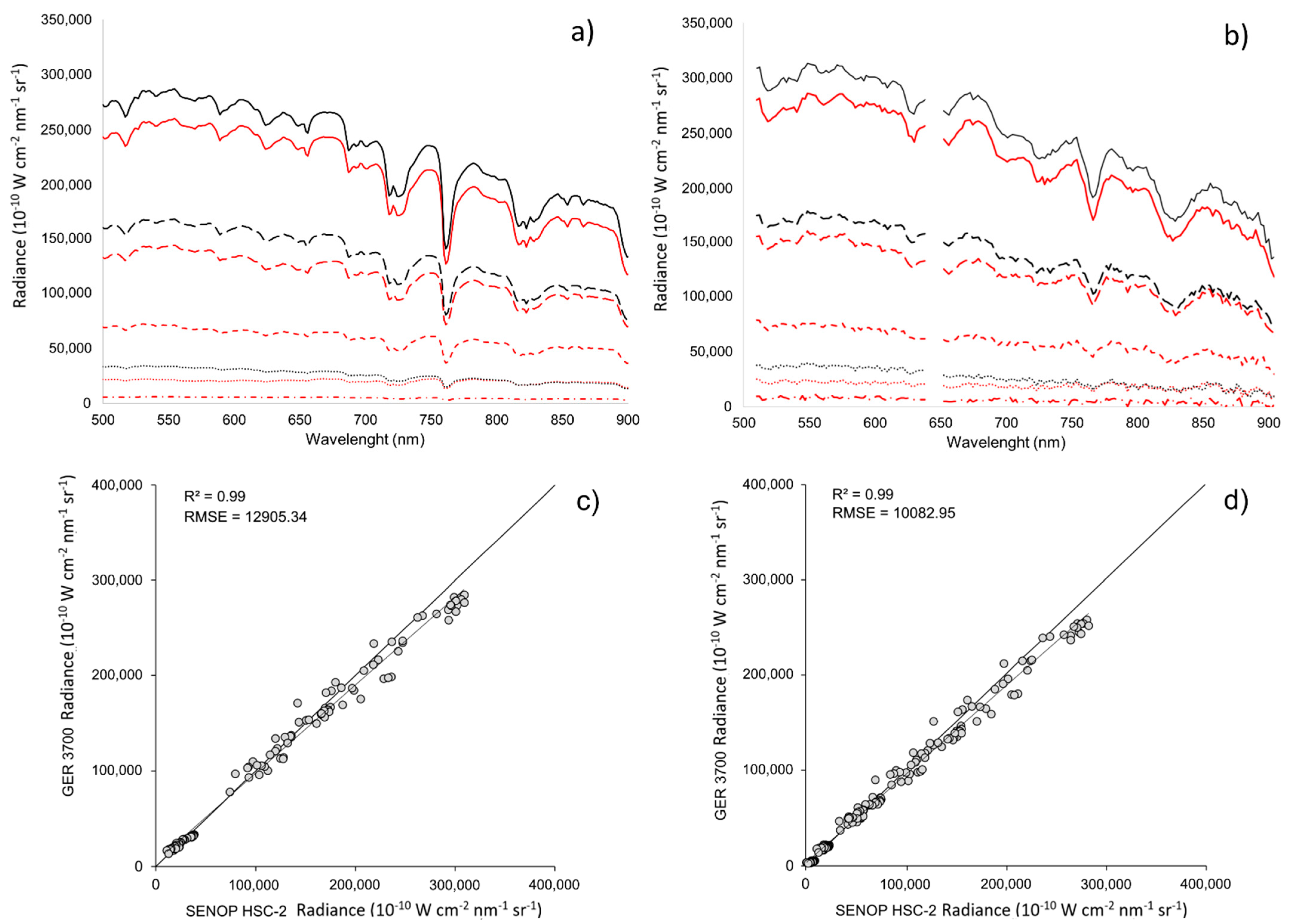
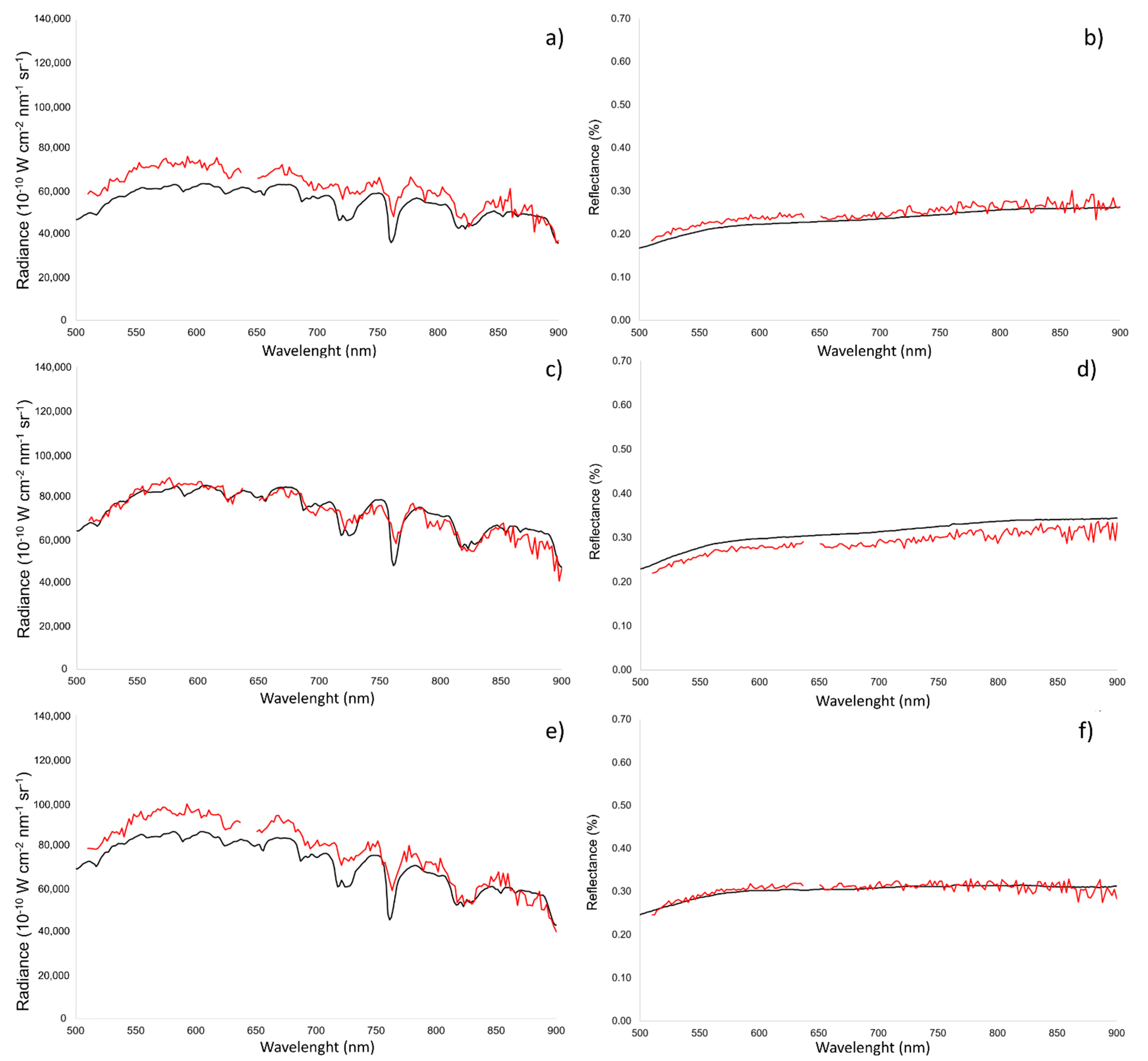
3.1. Hyperspectral Comparison
3.2. Multispectral Comparison
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Giovos, R.; Tassopoulos, D.; Kalivas, D.; Lougkos, N.; Priovolou, A. Remote Sensing Vegetation Indices in Viticulture: A Critical Review. Agriculture 2021, 11, 457. [Google Scholar] [CrossRef]
- Tardaguila, J.; Stoll, M.; Gutiérrez, S.; Proffitt, T.; Diago, M.P. Smart applications and digital technologies in viticulture: A review. Smart Agric. Technol. 2021, 1, 100005. [Google Scholar] [CrossRef]
- Matese, A.; Berton, A.; Di Gennaro, S.F.; Gatti, M.; Squeri, C.; Poni, S. Testing performance of UAV-based hyperspectral imagery in viticulture. In Proceedings of the Precision Agriculture ’21; Wageningen Academic Publishers: Wageningen, The Netherlands; Budapest, Hungary, 2021; pp. 509–516. [Google Scholar]
- Reynolds, A.G.; Vanden Heuvel, J.E. Influence of Grapevine Training Systems on Vine Growth and Fruit Composition: A Review. Am. J. Enol. Vitic. 2009, 60, 251–268. [Google Scholar]
- Di Gennaro, S.F.; Matese, A. Evaluation of novel precision viticulture tool for canopy biomass estimation and missing plant detection based on 2.5D and 3D approaches using RGB images acquired by UAV platform. Plant Methods 2020, 16, 91. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Dainelli, R.; Palliotti, A.; Toscano, P.; Matese, A. Sentinel-2 Validation for Spatial Variability Assessment in Overhead Trellis System Viticulture Versus UAV and Agronomic Data. Remote Sens. 2019, 11, 2573. [Google Scholar] [CrossRef] [Green Version]
- Sozzi, M.; Kayad, A.; Marinello, F.; Taylor, J.; Tisseyre, B. Comparing vineyard imagery acquired from Sentinel-2 and Unmanned Aerial Vehicle (UAV) platform. OENO One 2020, 54, 189–197. [Google Scholar] [CrossRef] [Green Version]
- Romboli, Y.; Di Gennaro, S.F.; Mangani, S.; Buscioni, G.; Matese, A.; Genesio, L.; Vincenzini, M. Vine vigour modulates bunch microclimate and affects the composition of grape and wine flavonoids: An unmanned aerial vehicle approach in a Sangiovese vineyard in Tuscany. Aust. J. Grape Wine Res. 2017, 23, 368–377. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S.F. Practical applications of a multisensor UAV platform based on multispectral, thermal and RGB high resolution images in precision viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef] [Green Version]
- Bendel, N.; Backhaus, A.; Kicherer, A.; Köckerling, J.; Maixner, M.; Jarausch, B.; Biancu, S.; Klück, H.-C.; Seiffert, U.; Voegele, R.T.; et al. Detection of Two Different Grapevine Yellows in Vitis vinifera Using Hyperspectral Imaging. Remote Sens. 2020, 12, 4151. [Google Scholar] [CrossRef]
- Sassu, A.; Gambella, F.; Ghiani, L.; Mercenaro, L.; Caria, M.; Pazzona, A.L. Advances in Unmanned Aerial System Remote Sensing for Precision Viticulture. Sensors 2021, 21, 956. [Google Scholar] [CrossRef] [PubMed]
- Pádua, L.; Marques, P.; Hruška, J.; Adão, T.; Bessa, J.; Sousa, A.; Peres, E.; Morais, R.; Sousa, J.J. Vineyard properties extraction combining UAS-based RGB imagery with elevation data. Int. J. Remote Sens. 2018, 39, 5377–5401. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Adão, T.; Guimarães, N.; Sousa, A.; Peres, E.; Sousa, J.J. Vineyard Variability Analysis through UAV-Based Vigour Maps to Assess Climate Change Impacts. Agronomy 2019, 9, 581. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Di Gennaro, S.F.; Santesteban, L.G. Methods to compare the spatial variability of UAV-based spectral and geometric information with ground autocorrelated data. A case of study for precision viticulture. Comput. Electron. Agric. 2019, 162, 931–940. [Google Scholar] [CrossRef]
- Cinat, P.; Di Gennaro, S.F.; Berton, A.; Matese, A. Comparison of unsupervised algorithms for Vineyard Canopy segmentation from UAV multispectral images. Remote Sens. 2019, 11, 1023. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Di Gennaro, S.F. Technology in precision viticulture: A state of the art review. Int. J. Wine Res. 2015, 7, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative remote sensing at ultra-high resolution with UAV spectroscopy: A review of sensor technology, measurement procedures, and data correctionworkflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef] [Green Version]
- Ammoniaci, M.; Kartsiotis, S.-P.; Perria, R.; Storchi, P. State of the Art of Monitoring Technologies and Data Processing for Precision Viticulture. Agriculture 2021, 11, 201. [Google Scholar] [CrossRef]
- Assmann, J.J.; Kerby, J.T.; Cunliffe, A.M.; Myers-Smith, I.H. Vegetation monitoring using multispectral sensors—Best practices and lessons learned from high latitudes. J. Unmanned Veh. Syst. 2019, 7, 54–75. [Google Scholar] [CrossRef] [Green Version]
- Primicerio, J.; Di Gennaro, S.F.; Fiorillo, E.; Genesio, L.; Lugato, E.; Matese, A.; Vaccari, F.P. A flexible unmanned aerial vehicle for precision agriculture. Precis. Agric. 2012, 13, 517–523. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bareth, G. Introducing a low-cost mini-uav for thermal- and multispectral-imaging. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 345–349. [Google Scholar] [CrossRef] [Green Version]
- Suárez, L.; Zarco-Tejada, P.J.; Sepulcre-Cantó, G.; Pérez-Priego, O.; Miller, J.R.; Jiménez-Muñoz, J.C.; Sobrino, J. Assessing canopy PRI for water stress detection with diurnal airborne imagery. Remote Sens. Environ. 2008, 112, 560–575. [Google Scholar] [CrossRef]
- Fawcett, D.; Panigada, C.; Tagliabue, G.; Boschetti, M.; Celesti, M.; Evdokimov, A.; Biriukova, K.; Colombo, R.; Miglietta, F.; Rascher, U.; et al. Multi-Scale Evaluation of Drone-Based Multispectral Surface Reflectance and Vegetation Indices in Operational Conditions. Remote Sens. 2020, 12, 514. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Shu, M.; Shen, M.; Zuo, J.; Yin, P.; Wang, M.; Xie, Z.; Tang, J.; Wang, R.; Li, B.; Yang, X.; et al. The Application of UAV-Based Hyperspectral Imaging to Estimate Crop Traits in Maize Inbred Lines. Plant Phenomics 2021, 2021, 9890745. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Deng, L.; Liu, X.; Zhu, L. Application of UAV-Based Multi-angle Hyperspectral Remote Sensing in Fine Vegetation Classification. Remote Sens. 2019, 11, 2753. [Google Scholar] [CrossRef] [Green Version]
- Honkavaara, E.; Rosnell, T.; Oliveira, R.; Tommaselli, A. Band registration of tuneable frame format hyperspectral UAV imagers in complex scenes. ISPRS J. Photogramm. Remote Sens. 2017, 134, 96–109. [Google Scholar] [CrossRef]
- Gauci, A.A.; Brodbeck, C.J.; Poncet, A.M.; Knappenberger, T. Assessing the Geospatial Accuracy of Aerial Imagery Collected with Various UAS Platforms. Trans. ASABE 2018, 61, 1823–1829. [Google Scholar] [CrossRef]
- Poncet, A.M.; Knappenberger, T.; Brodbeck, C.; Fogle, M.; Shaw, J.N.; Ortiz, B.V. Multispectral UAS Data Accuracy for Different Radiometric Calibration Methods. Remote Sens. 2019, 11, 1917. [Google Scholar] [CrossRef] [Green Version]
- Herrero-Huerta, M.; Hernández-López, D.; Rodriguez-Gonzalvez, P.; González-Aguilera, D.; González-Piqueras, J. Vicarious radiometric calibration of a multispectral sensor from an aerial trike applied to precision agriculture. Comput. Electron. Agric. 2014, 108, 28–38. [Google Scholar] [CrossRef]
- Iqbal, F.; Lucieer, A.; Barry, K. Simplified radiometric calibration for UAS-mounted multispectral sensor. Eur. J. Remote Sens. 2018, 51, 301–313. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S.F. Beyond the traditional NDVI index as a key factor to mainstream the use of UAV in precision viticulture. Sci. Rep. 2021, 11, 2721. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Myint, S.W. A Simplified Empirical Line Method of Radiometric Calibration for Small Unmanned Aircraft Systems-Based Remote Sensing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1876–1885. [Google Scholar] [CrossRef]
- Liu, T.; Abd-Elrahman, A.; Morton, J.; Wilhelm, V.L. Comparing fully convolutional networks, random forest, support vector machine, and patch-based deep convolutional neural networks for object-based wetland mapping using images from small unmanned aircraft system. GISci. Remote Sens. 2018, 55, 243–264. [Google Scholar] [CrossRef]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Cao, H.; Gu, X.; Wei, X.; Yu, T.; Zhang, H. Lookup Table Approach for Radiometric Calibration of Miniaturized Multispectral Camera Mounted on an Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 4012. [Google Scholar] [CrossRef]
- Fraser, B.T.; Congalton, R.G. Issues in Unmanned Aerial Systems (UAS) Data Collection of Complex Forest Environments. Remote Sens. 2018, 10, 908. [Google Scholar] [CrossRef] [Green Version]
- Lu, H.; Fan, T.; Ghimire, P.; Deng, L. Experimental Evaluation and Consistency Comparison of UAV Multispectral Minisensors. Remote Sens. 2020, 12, 2542. [Google Scholar] [CrossRef]
- Hollberg, J.L.; Schellberg, J. Distinguishing Intensity Levels of Grassland Fertilization Using Vegetation Indices. Remote Sens. 2017, 9, 81. [Google Scholar] [CrossRef] [Green Version]
- Lussem, U.; Bolten, A.; Menne, J.; Gnyp, M.L.; Schellberg, J.; Bareth, G. Estimating biomass in temperate grassland with high resolution canopy surface models from UAV-based RGB images and vegetation indices. J. Appl. Remote Sens. 2019, 13, 1–26. [Google Scholar] [CrossRef]
- Jenal, A.; Hüging, H.; Ahrends, H.E.; Bolten, A.; Bongartz, J.; Bareth, G. Investigating the Potential of a Newly Developed UAV-Mounted VNIR/SWIR Imaging System for Monitoring Crop Traits—A Case Study for Winter Wheat. Remote Sens. 2021, 13, 1697. [Google Scholar] [CrossRef]
- von Bueren, S.K.; Burkart, A.; Hueni, A.; Rascher, U.; Tuohy, M.P.; Yule, I.J. Deploying four optical UAV-based sensors over grassland: Challenges and limitations. Biogeosciences 2015, 12, 163–175. [Google Scholar] [CrossRef] [Green Version]
- Bareth, G.; Aasen, H.; Bendig, J.; Gnyp, M.L.; Bolten, A.; Jung, A.; Michels, R.; Soukkamäki, J. Low-weight and UAV-based hyperspectral full-frame cameras for monitoring crops: Spectral comparison with portable spectroradiometer measurements. Photogramm. Fernerkund. Geoinf. 2015, 2015, 69–79. [Google Scholar] [CrossRef]
- Nebiker, S.; Lack, N.; Abächerli, M.; Läderach, S. Light-weight multispectral uav sensors and their capabilities for predicting grain yield and detecting plant diseases. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 963–970. [Google Scholar] [CrossRef] [Green Version]
- Crucil, G.; Castaldi, F.; Aldana-Jague, E.; van Wesemael, B.; Macdonald, A.; Van Oost, K. Assessing the Performance of UAS-Compatible Multispectral and Hyperspectral Sensors for Soil Organic Carbon Prediction. Sustainability 2019, 11, 1889. [Google Scholar] [CrossRef] [Green Version]
- Tommaselli, A.M.G.; Santos, L.D.; Berveglieri, A.; Oliveira, R.A.; Honkavaara, E. A study on the variations of inner orientation parameters of a hyperspectral frame camera. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII–1, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Blackburn, G.A. Hyperspectral remote sensing of plant pigments. J. Exp. Bot. 2007, 58, 855–867. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Olsson, P.O.; Vivekar, A.; Adler, K.; Garcia Millan, V.E.; Koc, A.; Alamrani, M.; Eklundh, L. Radiometric correction of multispectral uas images: Evaluating the accuracy of the parrot sequoia camera and sunshine sensor. Remote Sens. 2021, 13, 577. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Quantitative estimation of chlorophyll-a using reflectance spectra: Experiments with autumn chestnut and maple leaves. J. Photochem. Photobiol. B Biol. 1994, 22, 247–252. [Google Scholar] [CrossRef]
- Stow, D.; Nichol, C.J.; Wade, T.; Assmann, J.J.; Simpson, G.; Helfter, C. Illumination geometry and flying height influence surface reflectance and ndvi derived from multispectral UAS imagery. Drones 2019, 3, 55. [Google Scholar] [CrossRef] [Green Version]
- Mamaghani, B.; Salvaggio, C. Multispectral sensor calibration and characterization for sUAS remote sensing. Sensors 2019, 19, 4453. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Senthilnath, J.; Wu, W.; Zhang, X.; Zeng, Z.; Huang, H. Radiometric calibration for multispectral camera of different imaging conditions mounted on a UAV platform. Sustainability 2019, 11, 978. [Google Scholar] [CrossRef] [Green Version]
- Franzini, M.; Ronchetti, G.; Sona, G.; Casella, V. Geometric and radiometric consistency of parrot sequoia multispectral imagery for precision agriculture applications. Appl. Sci. 2019, 9, 5314. [Google Scholar] [CrossRef] [Green Version]
- Primicerio, J.; Gay, P.; Aimonino, D.R.; Comba, L.; Matese, A.; Di Gennaro, S.F. NDVI-based vigour maps production using automatic detection of vine rows in ultra-high resolution aerial images. In Proceedings of the Precision Agriculture 2015; Wageningen Academic Publishers: Wageningen, The Netherlands; Tel-Aviv, Israel, 2015; pp. 465–470. [Google Scholar]
- Poblete-Echeverría, C.; Olmedo, G.F.; Ingram, B.; Bardeen, M. Detection and segmentation of vine canopy in ultra-high spatial resolution RGB imagery obtained from Unmanned Aerial Vehicle (UAV): A case study in a commercial vineyard. Remote Sens. 2017, 9, 268. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturer | Sensor | Spectral Range (nm) | No. Bands | Spectral Resolution (nm) | Spatial Resolution (px) | Acquisition Mode | Weight (kg) | Optics | FOV |
|---|---|---|---|---|---|---|---|---|---|
| Spectra Vista Corporation | GER 3700 | 350–2500 | 704 | 1.5 nm @ 700 nm 6.5 nm @ 1600 nm 9.5 nm @ 2100 nm | No-imaging | Single point data | 6.3 kg | 25.0° | |
| SENOP | HSC-2 | 500–900 | 1000 | 6–18 nm | 1024 × 1024 | Snapshot | 0.99 kg | f/3.28 | 36.8° |
| DJI | P4M | 450 nm ± 16 nm 560 nm ± 16 nm 650 nm ± 16 nm 730 nm ± 16 nm 840 nm ± 26 nm | 1600 × 1300 | Snapshot | <0.1 kg | f/2.20 | 62.7° | ||
| Manufacturer | Link | Target | Dimension (cm) | Reflectance |
|---|---|---|---|---|
| OptoPolymer | https://www.optopolymer.de (accessed on 1 January 2022) | White | 100 × 50 | 97% |
| Grey | 100 × 50 | 56% | ||
| Black | 100 × 50 | 10% | ||
| Senop | https://senop.fi (accessed on 1 January 2022) | White | 50 × 50 | 88% |
| Grey light | 50 × 50 | 50% | ||
| Grey | 50 × 50 | 25% | ||
| Grey dark | 50 × 50 | 9% | ||
| Black | 50 × 50 | 2% |
| Name | Equation | Ref. |
|---|---|---|
| Green Normalized Difference Vegetation Index | [50] | |
| Normalized Difference Vegetation Index | [49] | |
| Red edge Normalized Difference Vegetation Index | [51] |
| GNDVI | NDVI | NDRE | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Target | Dataset | M1 | M2 | M3 | M4 | M1 | M2 | M3 | M4 | M1 | M2 | M3 | M4 |
| Soil with dry grass (Figure 3f) | SENOP HSC-2 | 2.7% | 13.6% | 9.3% | |||||||||
| DJI P4M 10000_0 | 100.0% | 100.0% | 10.2% | 35.4% | 100.0% | 100.0% | 19.3% | 18.9% | 100.0% | 100.0% | 33.3% | 65.4% | |
| DJI P4M 8000_0 | 100.0% | 100.0% | 6.5% | 28.9% | 100.0% | 100.0% | 14.3% | 43.4% | 100.0% | 100.0% | 20.5% | 57.5% | |
| DJI P4M 8000_-0.7 | 100.0% | 100.0% | 8.1% | 10.2% | 100.0% | 100.0% | 4.3% | 13.7% | 100.0% | 100.0% | 0.0% | 2.0% | |
| DJI P4M 8000_-1 | 100.0% | 100.0% | 6.5% | 11.3% | 100.0% | 100.0% | 10.4% | 9.3% | 100.0% | 100.0% | 29.6% | 7.6% | |
| DJI P4M AUTO_0 | 100.0% | 100.0% | 11.6% | 8.3% | 100.0% | 100.0% | 52.0% | 10.1% | 100.0% | 100.0% | 2.6% | 6.1% | |
| DJI P4M AUTO_-1 | 100.0% | 100.0% | 22.6% | 29.5% | 100.0% | 100.0% | 11.7% | 31.2% | 100.0% | 100.0% | 2.6% | 18.5% | |
| Soil with grass (Figure 3g) | SENOP HSC-2 | 13.0% | 9.2% | 2.2% | |||||||||
| DJI P4M 10000_0 | 100.0% | 100.0% | 27.6% | 24.3% | 82.8% | 86.4% | 36.9% | 35.6% | 27.0% | 10.5% | 31.2% | 14.5% | |
| DJI P4M 8000_0 | 100.0% | 100.0% | 21.8% | 40.7% | 79.0% | 77.1% | 32.7% | 45.7% | 27.8% | 27.2% | 14.1% | 1.7% | |
| DJI P4M 8000_-0.7 | 100.0% | 100.0% | 27.3% | 26.9% | 85.6% | 87.3% | 37.1% | 35.3% | 21.6% | 21.6% | 26.5% | 27.9% | |
| DJI P4M 8000_-1 | 100.0% | 100.0% | 27.7% | 26.2% | 85.6% | 83.3% | 39.1% | 35.0% | 13.7% | 19.6% | 38.1% | 30.6% | |
| DJI P4M AUTO_0 | 100.0% | 100.0% | 23.1% | 33.0% | 72.7% | 73.6% | 46.6% | 37.3% | 26.8% | 25.2% | 24.6% | 25.5% | |
| DJI P4M AUTO_-1 | 100.0% | 100.0% | 21.3% | 20.9% | 73.1% | 76.9% | 32.7% | 30.4% | 32.5% | 20.7% | 26.4% | 36.5% | |
| Canopy (Figure 3h) | SENOP HSC-2 | 1.0% | 1.6% | 6.5% | |||||||||
| DJI P4M 10000_0 | 37.4% | 37.0% | 7.0% | 7.0% | 19.9% | 19.0% | 9.9% | 9.8% | 9.7% | 9.3% | 17.0% | 1.8% | |
| DJI P4M 8000_0 | 42.2% | 43.1% | 2.6% | 18.7% | 24.0% | 24.4% | 1.9% | 17.7% | 6.8% | 0.1% | 11.3% | 13.6% | |
| DJI P4M 8000_-0.7 | 38.3% | 39.4% | 8.9% | 10.4% | 19.8% | 20.6% | 10.4% | 10.9% | 5.6% | 1.4% | 13.4% | 21.9% | |
| DJI P4M 8000_-1 | 35.7% | 35.7% | 5.8% | 8.0% | 17.5% | 17.8% | 7.0% | 9.2% | 9.8% | 11.1% | 12.1% | 11.8% | |
| DJI P4M AUTO_0 | 35.6% | 35.6% | 6.5% | 12.2% | 18.4% | 16.9% | 17.1% | 10.4% | 7.4% | 6.2% | 14.0% | 17.4% | |
| DJI P4M AUTO_-1 | 37.2% | 43.0% | 9.2% | 13.6% | 18.1% | 21.9% | 9.9% | 12.7% | 5.2% | 12.4% | 19.4% | 39.2% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Gennaro, S.F.; Toscano, P.; Gatti, M.; Poni, S.; Berton, A.; Matese, A. Spectral Comparison of UAV-Based Hyper and Multispectral Cameras for Precision Viticulture. Remote Sens. 2022, 14, 449. https://doi.org/10.3390/rs14030449
Di Gennaro SF, Toscano P, Gatti M, Poni S, Berton A, Matese A. Spectral Comparison of UAV-Based Hyper and Multispectral Cameras for Precision Viticulture. Remote Sensing. 2022; 14(3):449. https://doi.org/10.3390/rs14030449
Chicago/Turabian StyleDi Gennaro, Salvatore Filippo, Piero Toscano, Matteo Gatti, Stefano Poni, Andrea Berton, and Alessandro Matese. 2022. "Spectral Comparison of UAV-Based Hyper and Multispectral Cameras for Precision Viticulture" Remote Sensing 14, no. 3: 449. https://doi.org/10.3390/rs14030449