
Deep Learning-Based Flood Area Extraction for Fully Automated and Persistent Flood Monitoring Using Cloud Computing

Abstract
:1. Introduction
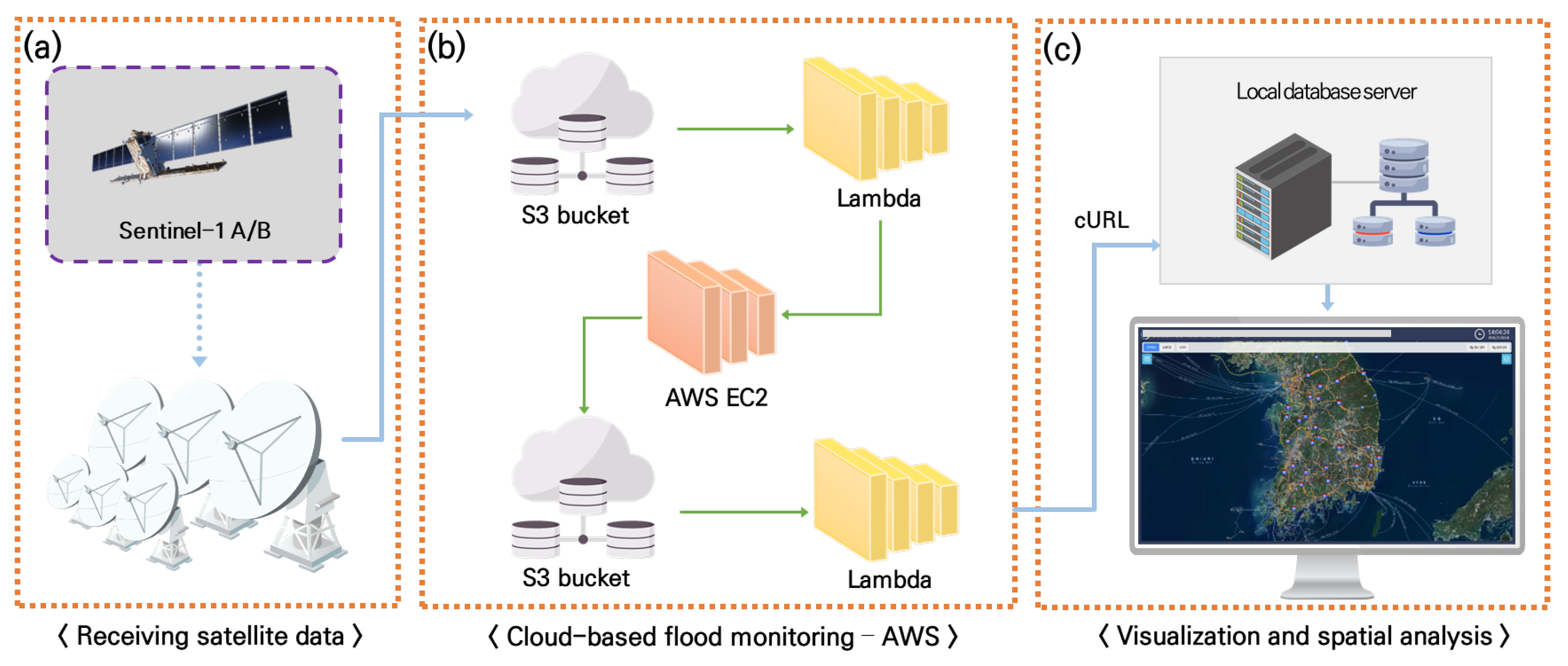
2. Development of a Fully Automated Flood Monitoring System
2.1. Overview of the Cloud-Based Flood Monitoring System Using Deep Learning with Land Cover Maps
2.2. Deep Learning-Based Waterbody Extraction Using Land Cover Maps
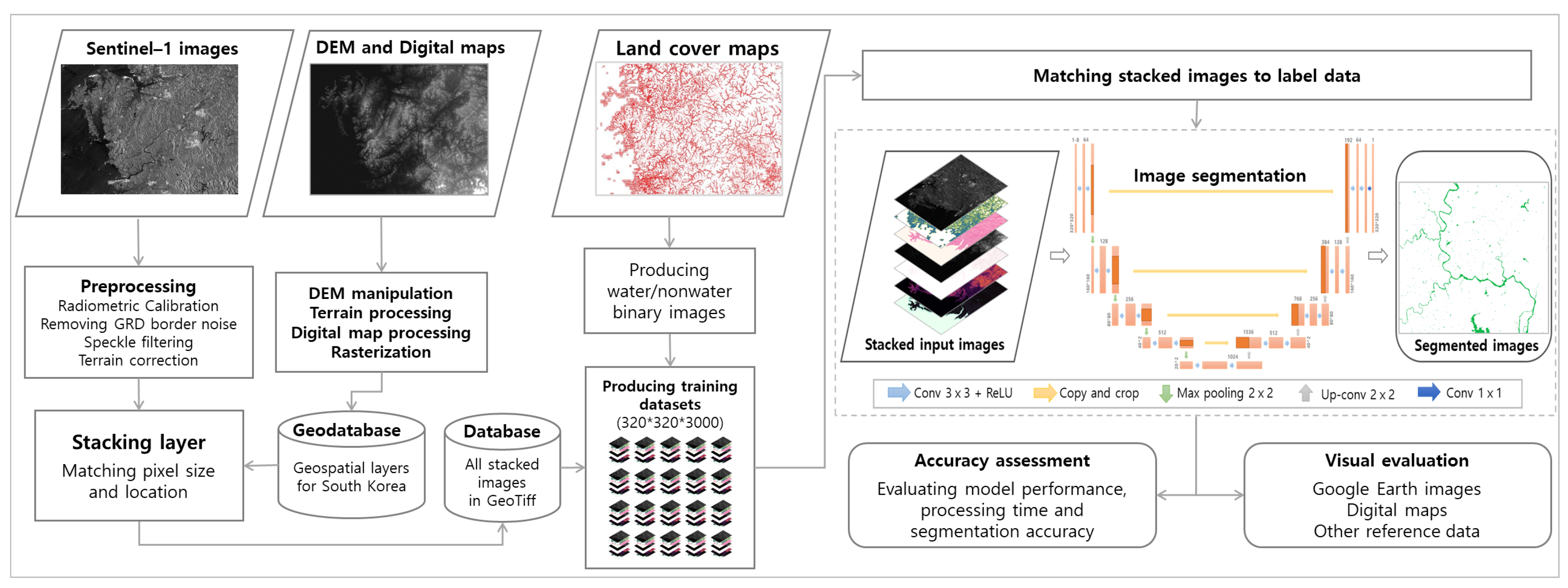
3. Development of the Deep Learning-Based Waterbody Extraction Model
3.1. Producing Input Data
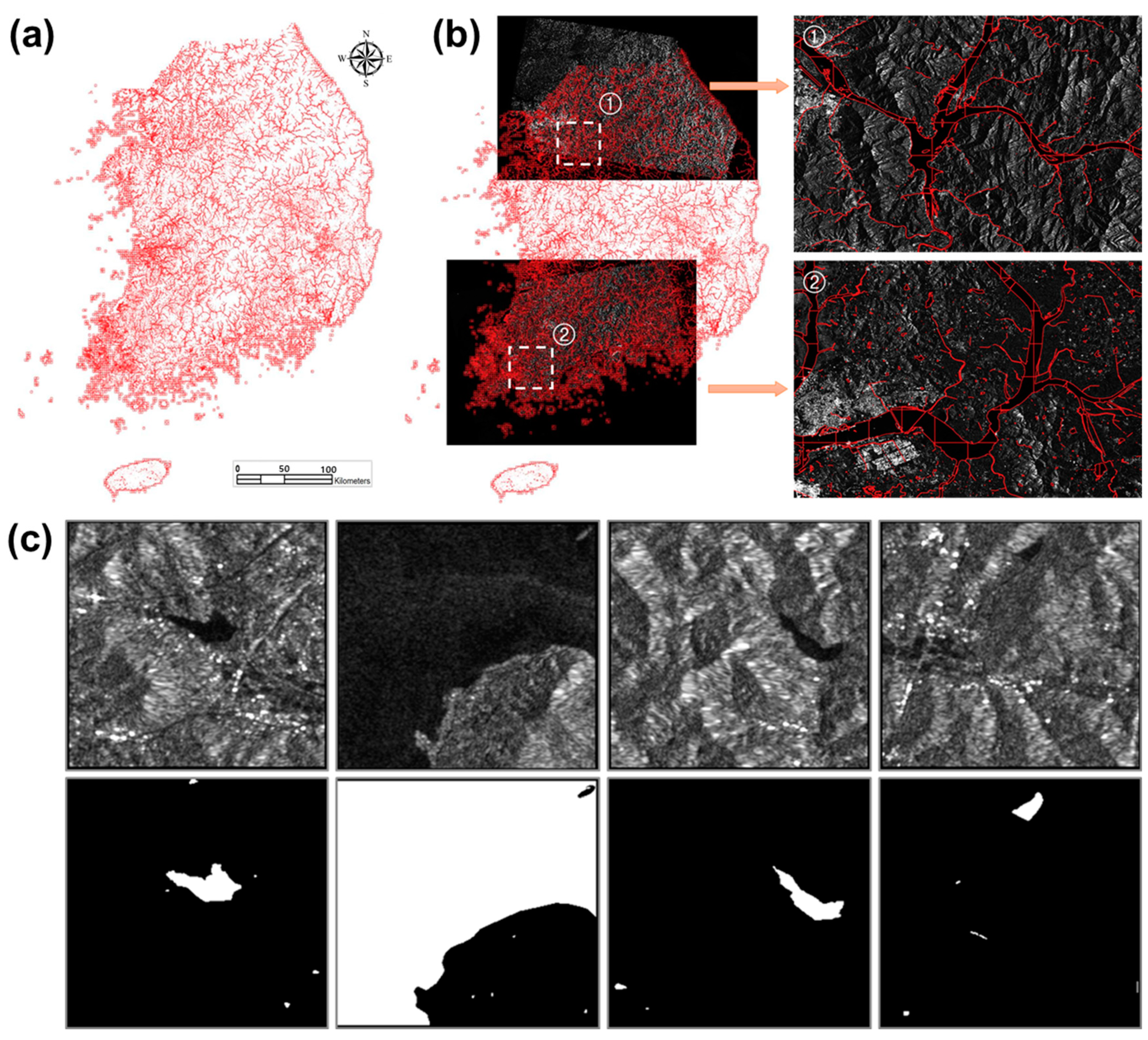
3.1.1. Preprocessing of Sentinel-1 Data and Producing Label Data
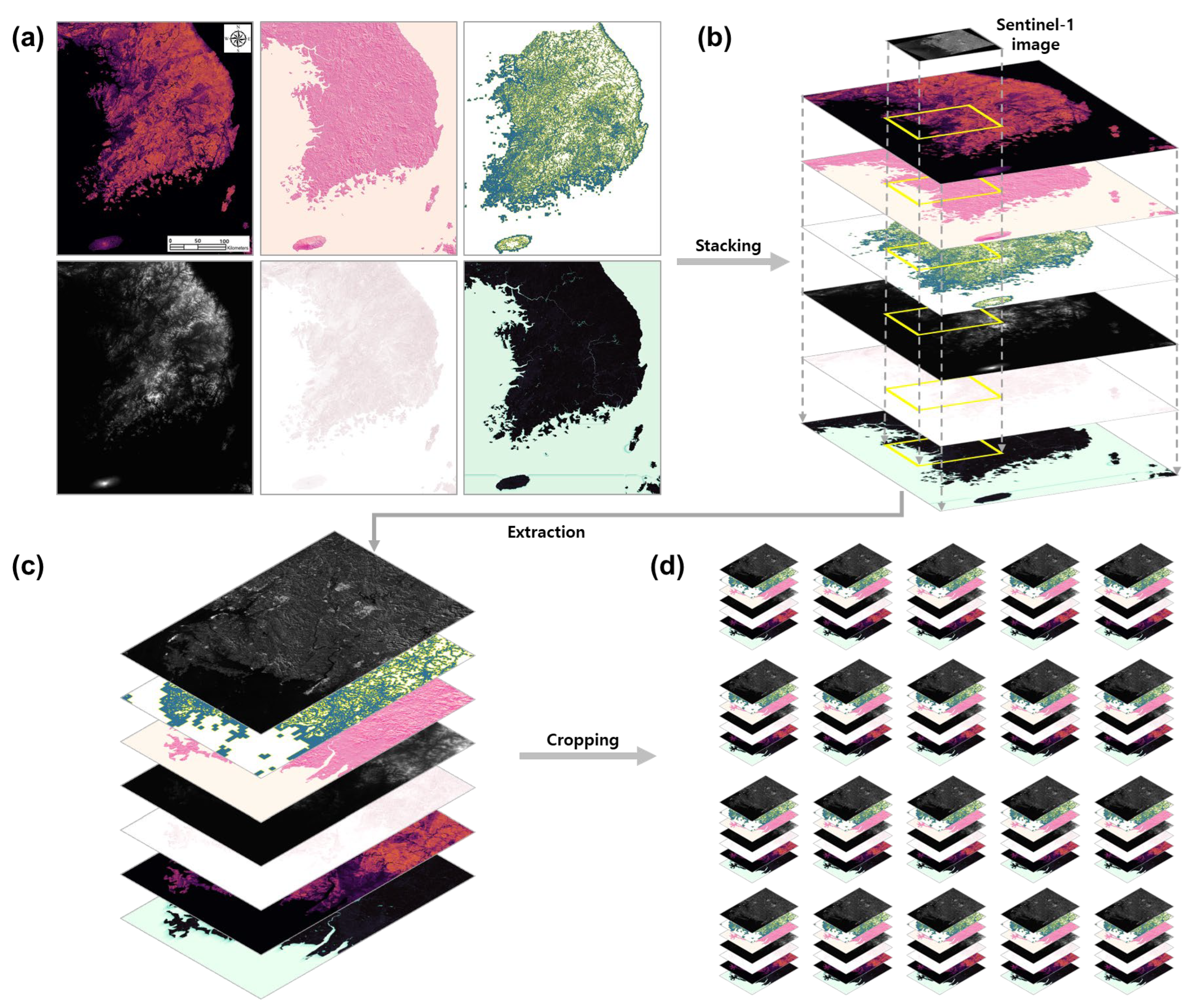
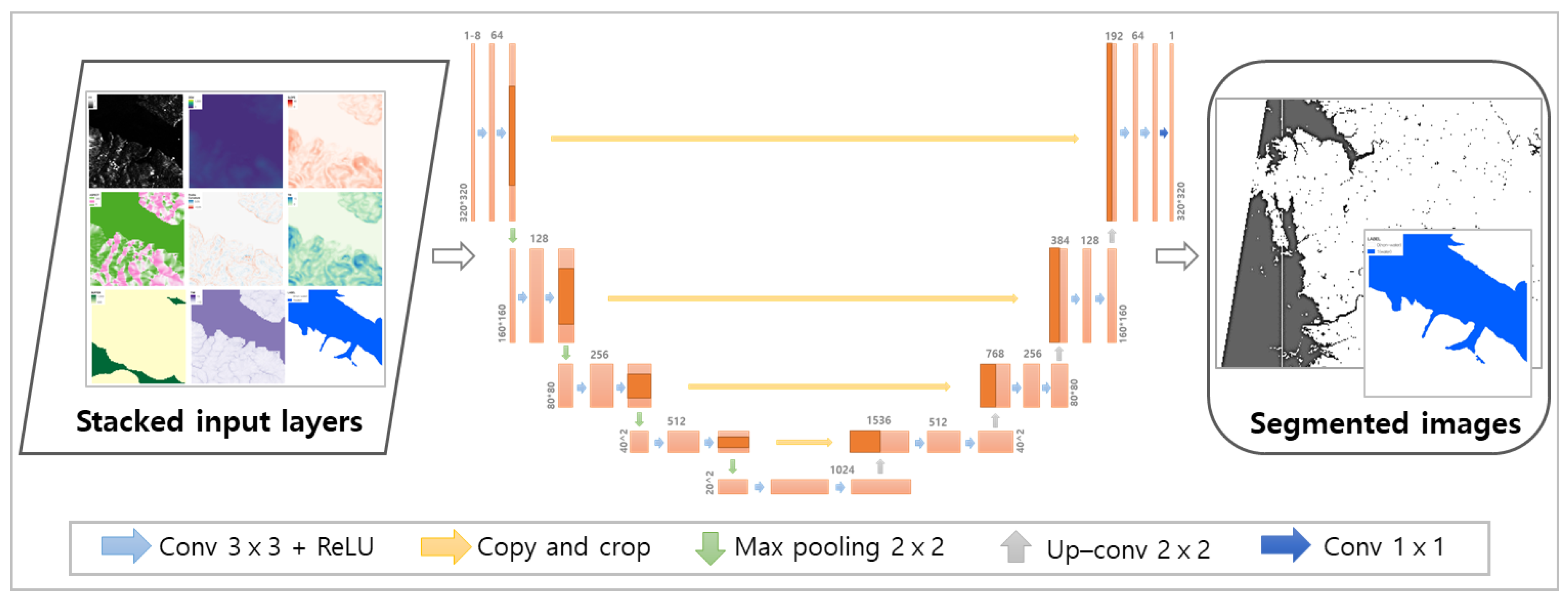
3.1.2. Producing Geospatial Layers and Stacking Input Layers
3.2. Developing Deep Learning-Based Image Segmentation Algorithm
3.2.1. Customization and Optimization of the Deep Neural Networks
3.2.2. Model Training and Inference
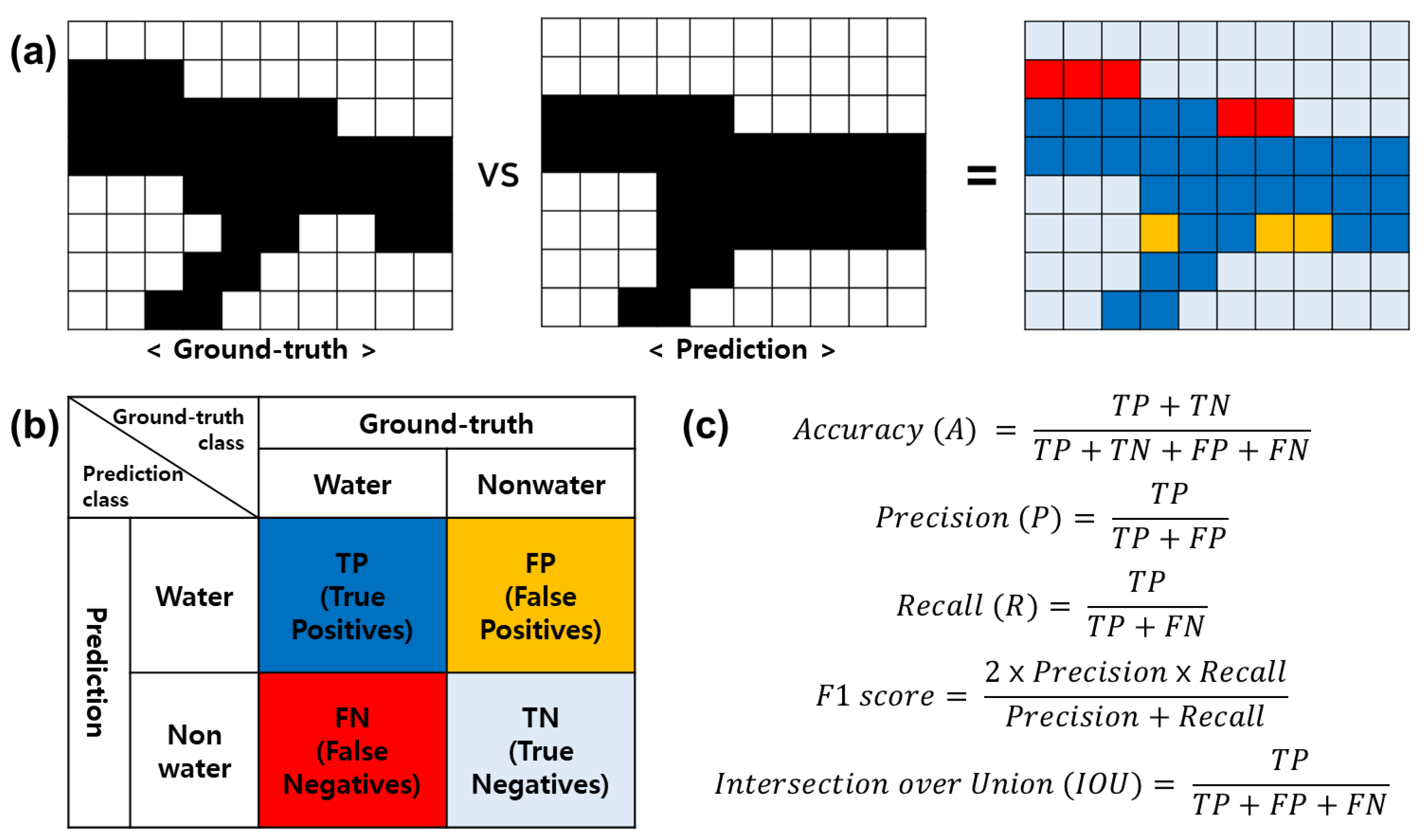
3.3. Evaluation of the Accuracy of Output Results
4. Results
4.1. Image Segmentation by Waterbody Ratio
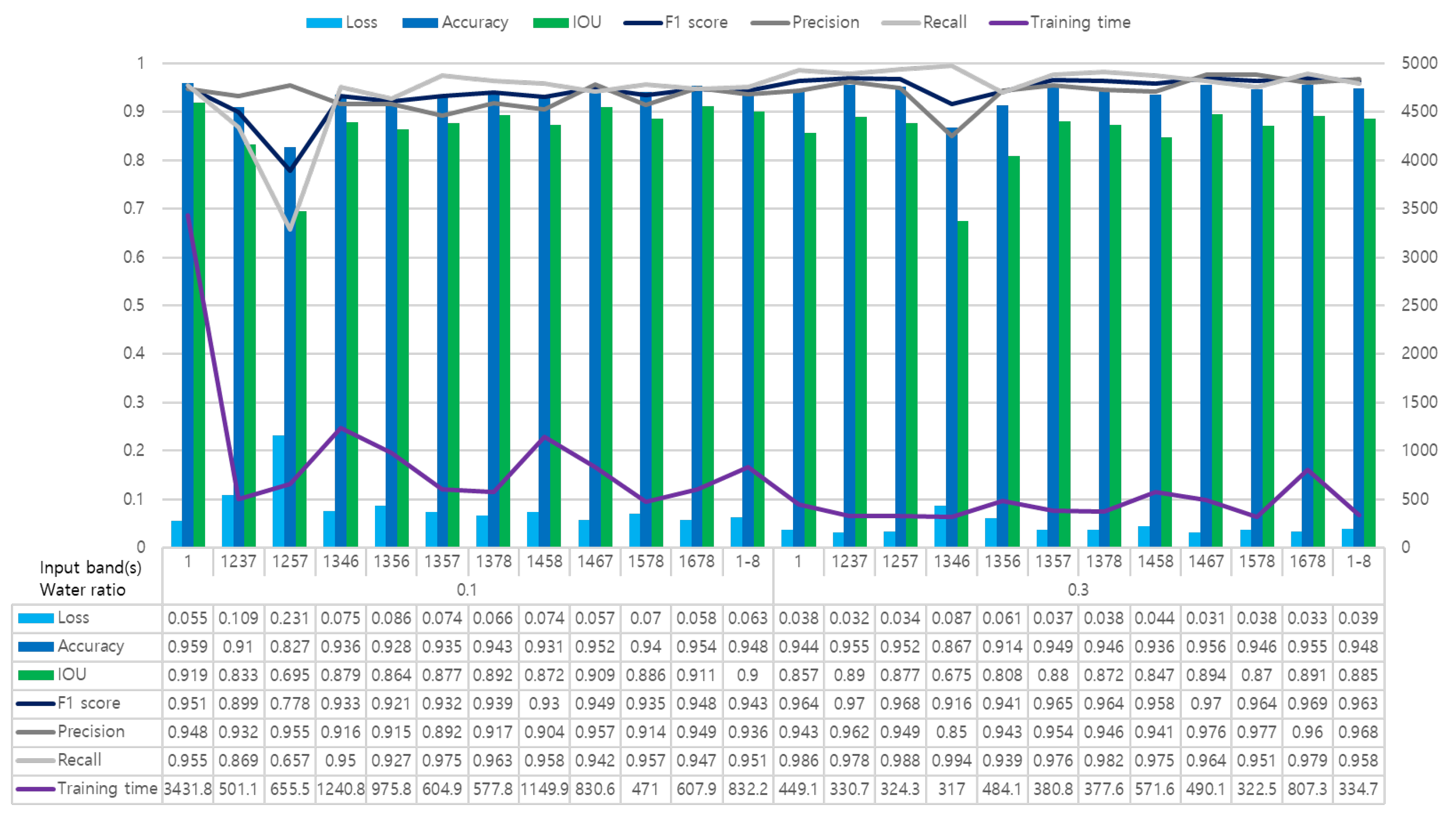
4.2. Image Segmentation by Input Layers
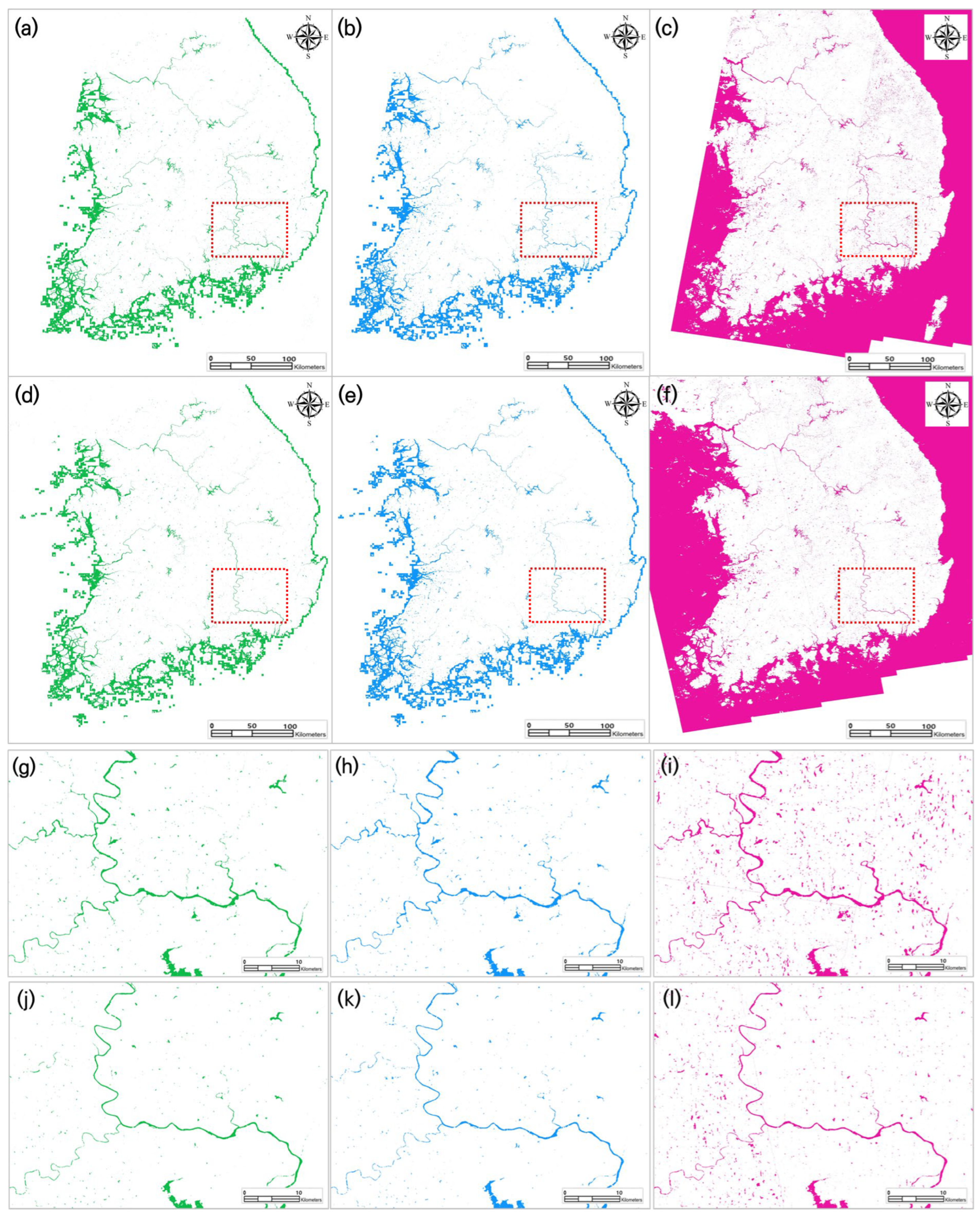
4.3. Image Segmentation for the Two Major Flood Events in 2020 and 2022
5. Discussion
5.1. Accuracy of Image Segmentation
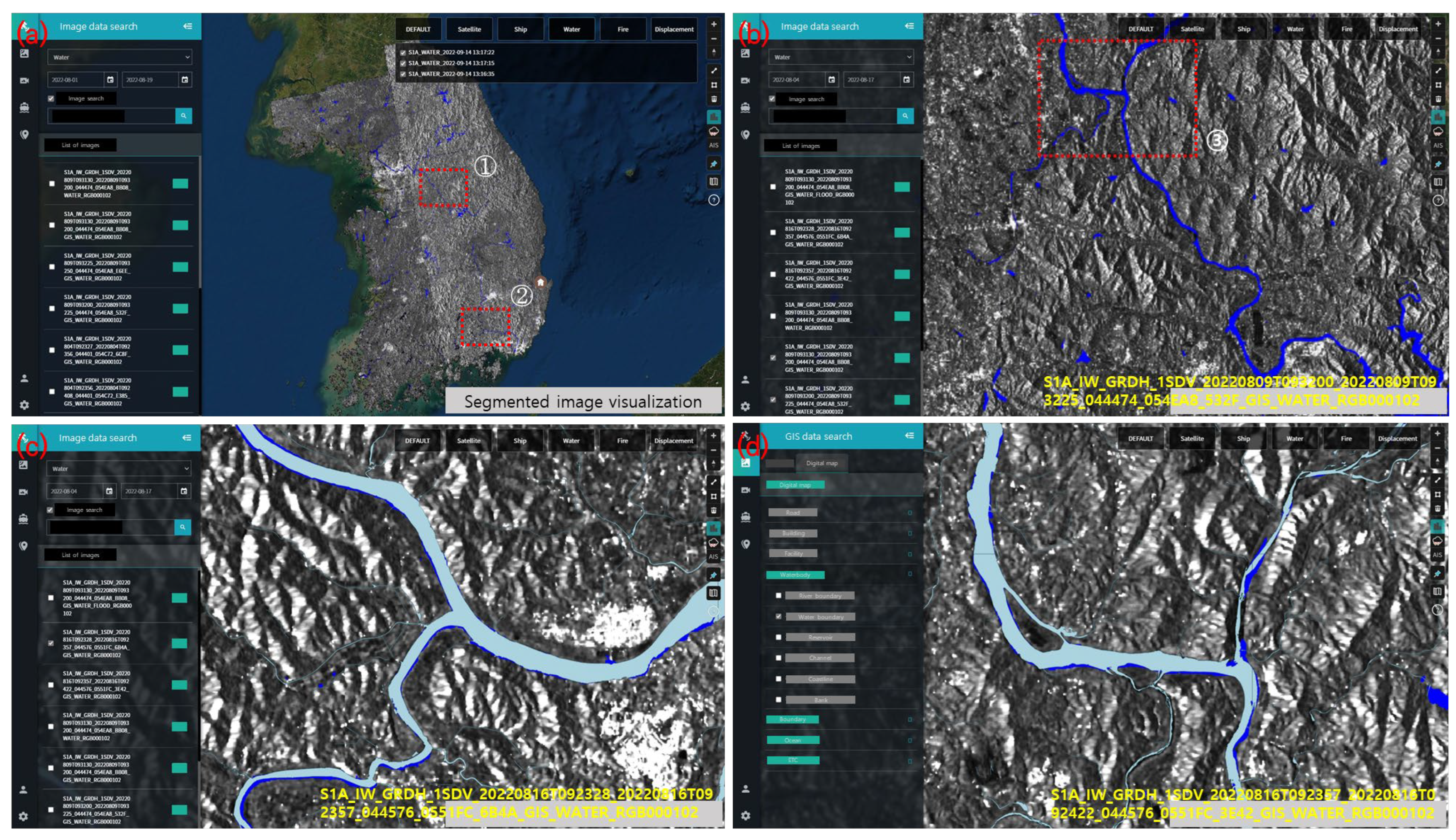
5.2. Processing Time, Memory Use, and Visualization
5.3. Novelty and Contribution
5.4. Implication, Limitations, and Future Work
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mikkelsen, P.S.; Adeler, O.F.; Albrechtsen, H.J.; Henze, M. Collected Rainfall as a Water Source in Danish Households–What Is the Potential and What Are the Costs? Water Sci. Technol. 1999, 39, 49–56. [Google Scholar] [CrossRef]
- Westra, S.; Fowler, H.J.; Evans, J.P.; Alexander, L.V.; Berg, P.; Johnson, F.; Kendon, E.J.; Lenderink, G.; Roberts, N. Future Changes to the Intensity and Frequency of Short-duration Extreme Rainfall. Rev. Geophys. 2014, 52, 522–555. [Google Scholar] [CrossRef] [Green Version]
- Matgen, P.; Martinis, S.; Wagner, W.; Freeman, V.; Zeil, P.; McCormick, N. Feasibility Assessment of an Automated, Global, Satellite-Based Flood-Monitoring Product for the Copernicus Emergency Management Service; EUR 30073 EN; Publications Office of the European Union: Luxembourg, 2020; pp. 1–47. ISBN 978-92-76-10254-0. [Google Scholar] [CrossRef]
- Ives, J.D.; Messerli, B. Mountain Hazards Mapping in Nepal Introduction to an Applied Mountain Research Project. Mt. Res. Dev. 1981, 1, 223–230. [Google Scholar] [CrossRef]
- Rimal, B.; Zhang, L.; Keshtkar, H.; Sun, X.; Rijal, S. Quantifying the Spatiotemporal Pattern of Urban Expansion and Hazard and Risk Area Identification in the Kaski District of Nepal. Land 2018, 7, 37. [Google Scholar] [CrossRef] [Green Version]
- Munawar, H.S. Flood Disaster Management: Risks, Technologies, and Future Directions. Mach. Vis. Insp. Syst. Image Process. Concepts Methodol. Appl. 2020, 1, 115–146. [Google Scholar]
- Cao, S.; Zheng, H. Climate Change Adaptation to Escape the Poverty Trap: Role of the Private Sector. Ecosyst. Health Sustain. 2016, 2, e01244. [Google Scholar] [CrossRef] [Green Version]
- Sharma, T.P.P.; Zhang, J.; Koju, U.A.; Zhang, S.; Bai, Y.; Suwal, M.K. Review of Flood Disaster Studies in Nepal: A Remote Sensing Perspective. Int. J. Disaster Risk Reduct. 2019, 34, 18–27. [Google Scholar] [CrossRef]
- Kundzewicz, Z.W.; Kanae, S.; Seneviratne, S.I.; Handmer, J.; Nicholls, N.; Peduzzi, P.; Mechler, R.; Bouwer, L.M.; Arnell, N.; Mach, K.; et al. Flood Risk and Climate Change: Global and Regional Perspectives. Hydrol. Sci. J. 2013, 59, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Komori, D.; Nakamura, S.; Kiguchi, M.; Nishijima, A.; Yamazaki, D.; Suzuki, S.; Kawasaki, A.; Oki, K.; Oki, T. Characteristics of the 2011 Chao Phraya River flood in Central Thailand. Hydrol. Res. Lett. 2012, 6, 41–46. [Google Scholar] [CrossRef]
- Kundu, S.; Aggarwal, S.P.; Kingma, N.; Mondal, A.; Khare, D. Flood Monitoring Using Microwave Remote Sensing in a Part of Nuna River Basin, Odisha, India. Nat. Hazards 2015, 76, 123–138. [Google Scholar] [CrossRef]
- Bilali, A.E.; Taleb, I.; Nafii, A.; Taleb, A. A practical probabilistic approach for simulating life loss in an urban area associated with a dam-break flood. Int. J. Disaster Risk Reduct. 2022, 76, 103011. [Google Scholar] [CrossRef]
- Zhuo, L.; Han, D. Agent-based modelling and flood risk management: A compendious literature review. J. Hydrol. 2020, 591, 125600. [Google Scholar] [CrossRef]
- Long, S.; Fatoyinbo, T.E.; Policelli, F. Flood Extent Mapping for Namibia Using Change Detection and Thresholding with SAR. Environ. Res. Lett. 2014, 9, 035002. [Google Scholar] [CrossRef]
- Rahman, M.R.; Thakur, P.K. Detecting, Mapping and Analysing of Flood Water Propagation Using Synthetic Aperture Radar (SAR) Satellite Data and GIS: A Case Study from the Kendrapara District of Orissa State of India. Egypt. J. Remote. Sens. Space Sci. 2018, 21, S37–S41. [Google Scholar] [CrossRef]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R. SAR-based Detection of Flooded Vegetation–a Review of Characteristics and Approaches. Int. J. Remote Sens. 2018, 39, 2255–2293. [Google Scholar] [CrossRef]
- Shen, X.; Wang, D.; Mao, K.; Anagnostou, E.; Hong, Y. Inundation Extent Mapping by Synthetic Aperture Radar: A Review. Remote Sens. 2019, 11, 879. [Google Scholar] [CrossRef] [Green Version]
- Bauer-Marschallinger, B.; Cao, S.; Navacchi, C.; Freeman, V.; Reuß, F.; Geudtner, D.; Rommen, B.; Vega, F.C.; Snoeij, P.; Attema, E.; et al. The Normalised Sentinel-1 Global Backscatter Model, Mapping Earth’s Land Surface with C-band Microwaves. Sci. Data 2021, 8, 277. [Google Scholar] [CrossRef]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffmann, L.; Savenije, H.H.G. Towards an Automated SAR-based Flood Monitoring System: Lessons Learned from Two Case Studies. Phys. Chem. Earth, Parts A/B/C 2011, 36, 241–252. [Google Scholar] [CrossRef]
- Lu, J.; Giustarini, L.; Xiong, B.; Zhao, L.; Jiang, Y.; Kuang, G. Automated Flood Detection with Improved Robustness and Efficiency Using Multi-temporal SAR Data. Remote Sens. Lett. 2014, 5, 240–248. [Google Scholar] [CrossRef]
- Martinis, S.; Kersten, J.; Twele, A. A Fully Automated TerraSAR-X based Flood Service. ISPRS J. Photogramm. Remote Sens. 2015, 104, 203–212. [Google Scholar] [CrossRef]
- Cian, F.; Marconcini, M.; Ceccato, P. Normalized Difference Flood Index for Rapid Flood Mapping: Taking Advantage of EO Big Data. Remote Sens. Environ. 2018, 209, 712–730. [Google Scholar] [CrossRef]
- Cerrai, D.; Yang, Q.; Shen, X.; Koukoula, M.; Anagnostou, E.N. Brief communication: Hurricane Dorian: Automated Near-real-time Mapping of the “Unprecedented” Flooding in the Bahamas Using Synthetic Aperture Radar. Nat. Hazards Earth Syst. Sci. 2020, 20, 1463–1468. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards Operational Near Real-time Flood Detection Using a Split-based Automatic Thresholding Procedure on High Resolution TerraSAR-X Data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Chini, M.; Hostache, R.; Giustarini, L.; Matgen, P. A Hierarchical Split-based Approach for Parametric Thresholding of SAR Images: Flood Inundation as a Test Case. IEEE T. Geosci. Remote Sens. 2017, 55, 6975–6988. [Google Scholar] [CrossRef]
- Giustarini, L.; Hostache, R.; Matgen, P.; Schumann, G.J.P.; Bates, P.D.; Mason, D.C. A Change Detection Approach to Flood Mapping in Urban Areas Using TerraSAR-X. IEEE T. Geosci. Remote Sens. 2012, 51, 2417–2430. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.; DeVries, B.; Huang, C.; Lang, M.W.; Jones, J.W.; Creed, I.F.; Carroll, M.L. Automated Extraction of Surface Water Extent from Sentinel-1 Data. Remote Sens. 2018, 10, 797. [Google Scholar] [CrossRef] [Green Version]
- Ireland, G.; Volpi, M.; Petropoulos, G.P. Examining the Capability of Supervised Machine Learning Cassifiers in Extracting Flooded Areas from Landsat TM Imagery: A Case Study from a Mediterranean Flood. Remote Sens. 2015, 7, 3372–3399. [Google Scholar] [CrossRef] [Green Version]
- Shen, X.; Anagnostou, E.N.; Allen, G.H.; Brakenridge, G.R.; Kettner, A.J. Near-real-time Non-obstructed Flood Inundation Mapping Using Synthetic Aperture Radar. Remote Sens. Environ. 2019, 221, 302–315. [Google Scholar] [CrossRef]
- Nemni, E.; Bullock, J.; Belabbes, S.; Bromley, L. Fully Convolutional Neural Network for Rapid Flood Segmentation in Synthetic Aperture Radar Imagery. Remote Sens. 2020, 12, 2532. [Google Scholar] [CrossRef]
- Kang, W.; Xiang, Y.; Wang, F.; Wan, L.; You, H. Flood Detection in Gaofen-3 SAR Images via Fully Convolutional Networks. Sensors 2018, 18, 2915. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Scarpa, G.; Gargiulo, M.; Mazza, A.; Gaetano, R. A CNN-based Fusion Method for Feature Extraction from Sentinel Data. Remote Sens. 2018, 10, 236. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Kim, H.; Jeon, H.; Jeong, S.H.; Song, J.; Vadivel, S.K.P.; Kim, D.J. Synergistic Use of Geospatial Data for Water Body Extraction from Sentinel-1 Images for Operational Flood Monitoring across Southeast Asia Using Deep Neural Networks. Remote Sens. 2021, 13, 4759. [Google Scholar] [CrossRef]
- Beven, K.J.; Kirkby, M.J. A Physically Based, Variable Contributing Area Model of Basin Hydrology. Hydrol. Sci. J. 1979, 24, 43–69. [Google Scholar] [CrossRef] [Green Version]
- Tarboton, D.G. A New Method for the Determination of Flow Directions and Upslope Areas in Grid Digital Elevation Models. Water Resour. Res. 1997, 33, 309–319. [Google Scholar] [CrossRef] [Green Version]
- Riley, S.J.; DeGloria, S.D.; Elliot, R. Index that Quantifies Topographic Heterogeneity. Intermt. J. Sci. 1999, 5, 23–27. [Google Scholar]
- Sörensen, R.; Zinko, U.; Seibert, J. On the Calculation of the Topographic Wetness Index: Evaluation of Different Methods Based on Field Observations. Hydrol. Earth Syst. Sci. 2006, 10, 101–112. [Google Scholar] [CrossRef] [Green Version]
- Bentivoglio, R.; Isufi, E.; Jonkman, S.N.; Taormina, R. Deep Learning Methods for Flood Mapping: A Review of Existing Applications and Future Research Directions. Hydrol. Earth Syst. Sci. 2022, 26, 4345–4378. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Du, L.; McCarty, G.W.; Zhang, X.; Lang, M.W.; Vanderhoof, M.K.; Li, X.; Huang, C.; Lee, S.; Zou, Z. Mapping Forested Wetland Inundation in the Delmarva Peninsula, USA Using Deep Convolutional Neural Networks. Remote Sens. 2020, 12, 644. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Chen, W.; Xie, S.M.; Azzari, G.; Lobell, D.B. Weakly Supervised Deep Learning for Segmentation of Remote Sensing Imagery. Remote Sens. 2020, 12, 207. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Gong, M.; Su, L.; Liu, J.; Li, Z. Change Detection Based on Deep Feature Representation and Mapping Transformation for Multi-spatial-resolution Remote Sensing Images. ISPRS J. Photogramm. Remote Sens. 2016, 116, 24–41. [Google Scholar] [CrossRef]
- Buscombe, D.; Ritchie, A.C. Landscape Classification with Deep Neural Networks. Geosciences 2018, 8, 244. [Google Scholar] [CrossRef] [Green Version]
- Ouled Sghaier, M.; Hammami, I.; Foucher, S.; Lepage, R. Flood Extent Mapping from Time-series SAR Images Based on Texture Analysis and Data Fusion. Remote Sens. 2018, 10, 237. [Google Scholar] [CrossRef] [Green Version]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based Flood Mapping: A Fully Automated Processing Chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Manavalan, R. SAR Image Analysis Techniques for Flood Area Mapping-literature Survey. Earth Sci. Inform. 2017, 10, 1–14. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameters for Producing Deep Learning Models | |
|---|---|
| Kernel size (upsampling/output) | 2 × 2/1 × 1 |
| Stride/Padding | 1 × 1/zero padding |
| Activation function | ReLU/sigmoid (output layer) |
| Learning rate/Decay rate | Adam optimizer 0.001/beta1 = 0.9, beta2 = 0.999 |
| Max epoch/Iteration | 1000/30 per epoch |
| Early stopping | No improvement of loss for ten epochs |
| Batch size | 32 |
| Patch size/Input channels | 256 × 256/1–8 |
| Training data/Water ratio | 4110/0.1 and 0.3 |
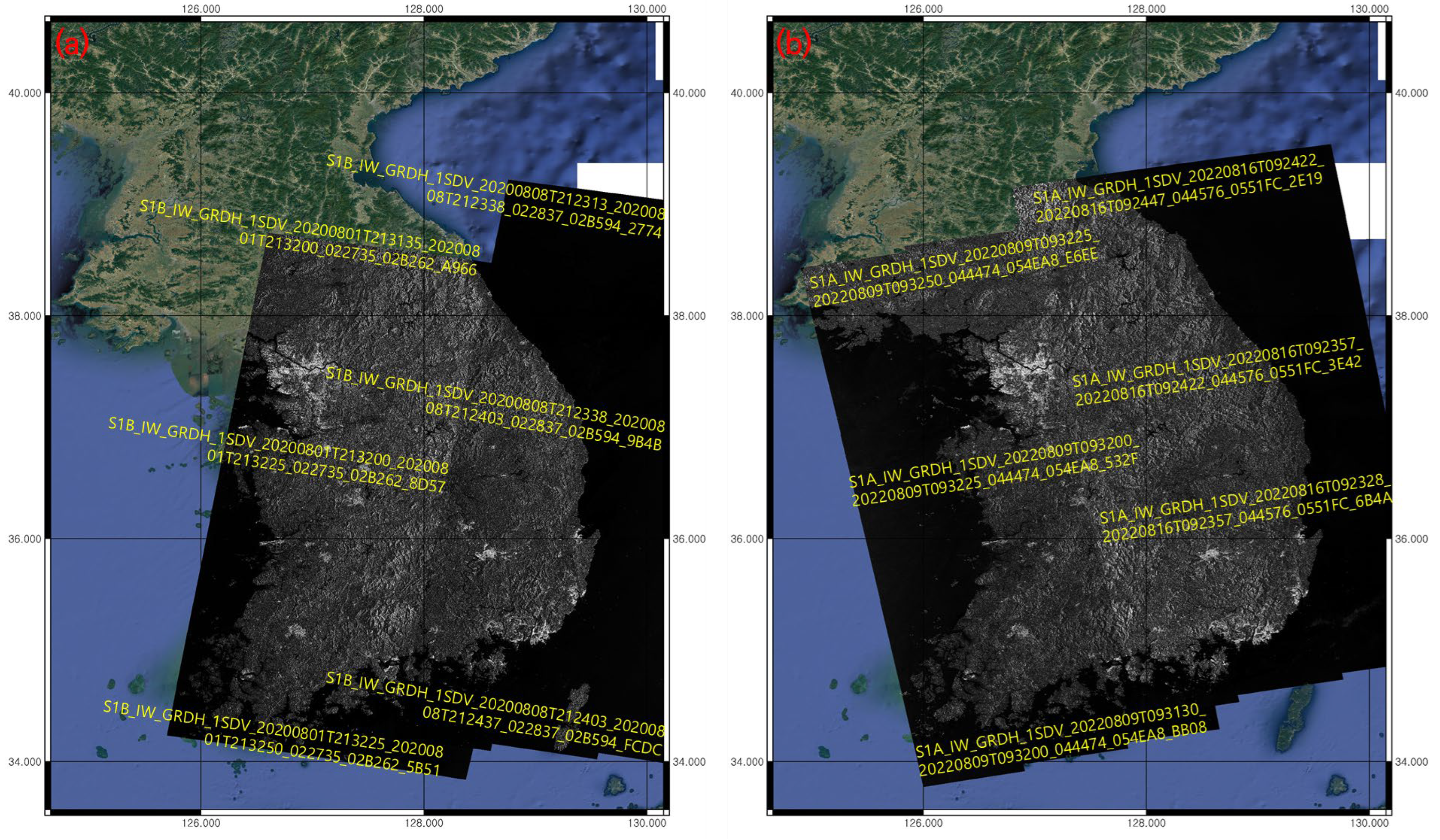
| No. | Satellite | Type/Mode | Acquisition Time (UTC) | Product ID | Usage |
|---|---|---|---|---|---|
| I-1 | Sentinel-1A | GRDH/IW | 2020/08/01 21:31:35–21:32:00 | 02B262_A966 | Inference |
| I-2 | Sentinel-1A | GRDH/IW | 2020/08/01 21:32:00–21:32:25 | 02B262_8D57 | Inference |
| I-3 | Sentinel-1A | GRDH/IW | 2020/08/01 21:32:25–21:32:50 | 02B262_5B51 | Inference |
| I-4 | Sentinel-1A | GRDH/IW | 2020/08/08 21:23:13–21:23:38 | 02B594_2774 | Inference |
| I-5 | Sentinel-1A | GRDH/IW | 2020/08/08 21:23:38–21:24:03 | 02B594_9B4B | Inference |
| I-6 | Sentinel-1A | GRDH/IW | 2020/08/08 21:24:03–21:24:37 | 02B594_FCDC | Inference |
| I-7 | Sentinel-1B | GRDH/IW | 2022/08/09 09:31:30–09:32:00 | 054EA8_BB08 | Inference |
| I-8 | Sentinel-1B | GRDH/IW | 2022/08/09 09:32:00–09:32:25 | 054EA8_532F | Inference |
| I-9 | Sentinel-1B | GRDH/IW | 2022/08/09 09:32:25–09:32:50 | 054EA8_E6EE | Inference |
| I-10 | Sentinel-1B | GRDH/IW | 2022/08/16 09:23:28–09:23:57 | 0551FC_6B4A | Inference |
| I-11 | Sentinel-1B | GRDH/IW | 2022/08/16 09:23:57–09:24:22 | 0551FC_3E42 | Inference |
| I-12 | Sentinel-1B | GRDH/IW | 2022/08/16 09:24:22–09:24:47 | 0551FC_2E19 | Inference |
| Water Ratio | No. of Patches | Training Time | Loss | Accuracy | Precision | Recall | IOU | F1 Score |
|---|---|---|---|---|---|---|---|---|
| 5% | 1038 | 512.1195 s | 0.189 | 0.897 | 0.897 | 0.795 | 0.793 | 0.842 |
| 10% | 745 | 705.3739 s | 0.092 | 0.927 | 0.907 | 0.929 | 0.862 | 0.918 |
| 20% | 511 | 418.7561 s | 0.095 | 0.892 | 0.908 | 0.917 | 0.796 | 0.912 |
| 30% | 370 | 373.3092 s | 0.049 | 0.926 | 0.917 | 0.990 | 0.816 | 0.952 |
| Scene ID | Inference Time (Sec) | ||
|---|---|---|---|
| VV AS TWI BF | VV DEM SL BF | VV | |
| I-1 (02B262_A966) | 854.4969 | 873.7666 | 857.9928 |
| I-2 (02B262_8D57) | 786.7988 | 795.0846 | 810.4651 |
| I-3 (02B262_5B51) | 695.3087 | 793.2391 | 751.3581 |
| I-4 (02B594_2774) | 871.7646 | 930.5432 | 905.7588 |
| I-5 (02B594_9B4B) | 744.1722 | 757.0344 | 762.0988 |
| I-6 (02B594_FCDC) | 724.4174 | 801.6264 | 807.6250 |
| I-7 (054EA8_BB08) | 711.2012 | 842.5217 | 839.9597 |
| I-8 (054EA8_532F) | 648.5044 | 827.2473 | 790.1158 |
| I-9 (054EA8_E6EE) | 678.2370 | 889.0405 | 830.3994 |
| I-10 (0551FC_6B4A) | 685.7259 | 916.4830 | 857.3961 |
| I-11 (0551FC_3E42) | 686.7059 | 896.8351 | 811.5082 |
| I-12 (0551FC_2E19) | 845.3665 | 1144.7612 | 1024.7044 |
| Averaged time | 744.3941 | 872.3501 | 837.4496 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Kim, H.; Kim, D.-j.; Song, J.; Li, C. Deep Learning-Based Flood Area Extraction for Fully Automated and Persistent Flood Monitoring Using Cloud Computing. Remote Sens. 2022, 14, 6373. https://doi.org/10.3390/rs14246373
Kim J, Kim H, Kim D-j, Song J, Li C. Deep Learning-Based Flood Area Extraction for Fully Automated and Persistent Flood Monitoring Using Cloud Computing. Remote Sensing. 2022; 14(24):6373. https://doi.org/10.3390/rs14246373
Chicago/Turabian StyleKim, Junwoo, Hwisong Kim, Duk-jin Kim, Juyoung Song, and Chenglei Li. 2022. "Deep Learning-Based Flood Area Extraction for Fully Automated and Persistent Flood Monitoring Using Cloud Computing" Remote Sensing 14, no. 24: 6373. https://doi.org/10.3390/rs14246373