1. Introduction
The arrival of South Asia’s annual southwest monsoons usually brings continuous heavy rainfall, leading to significant flood events and other natural disasters in parts of India, Nepal, and Bangladesh. The particularly noticeable flood inundation event in 2020 was South Asia’s most significant flood disaster over the past decade, causing huge property losses to local people [
1,
2,
3]. Due to the highly dynamic nature of floods, rapid and effective flood monitoring is important for early disaster prevention, midterm relief, and post-disaster reconstruction [
4].
The existing remote sensing means for flood monitoring mainly include optical and microwave remote sensing. However, optical remote sensing means cannot be used on rainy and cloudy days due to the sensors’ inherent characteristics, although they are capable of obtaining Earth surface observations with a satisfactory spatial resolution [
4,
5,
6,
7]. Conversely, passive microwave sensors, such as radiometers, have the ability to penetrate clouds and heavy fog owing to their long wavelength, which is requisite for flood monitoring as floods often occur during the rainy season. Nevertheless, the low spatial resolution of even dozens of kilometers limits the successful applications of passive microwave sensors for flood monitoring. On the other hand, active microwave remote sensing normally has a higher spatial resolution than passive microwave remote sensing. However, it also has a relatively lower temporal resolution and is still unable to conduct dynamic flood monitoring in a timely manner [
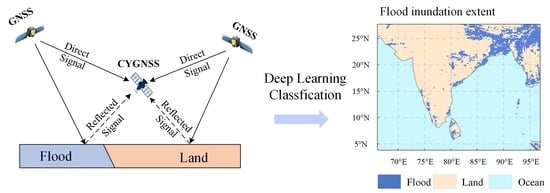
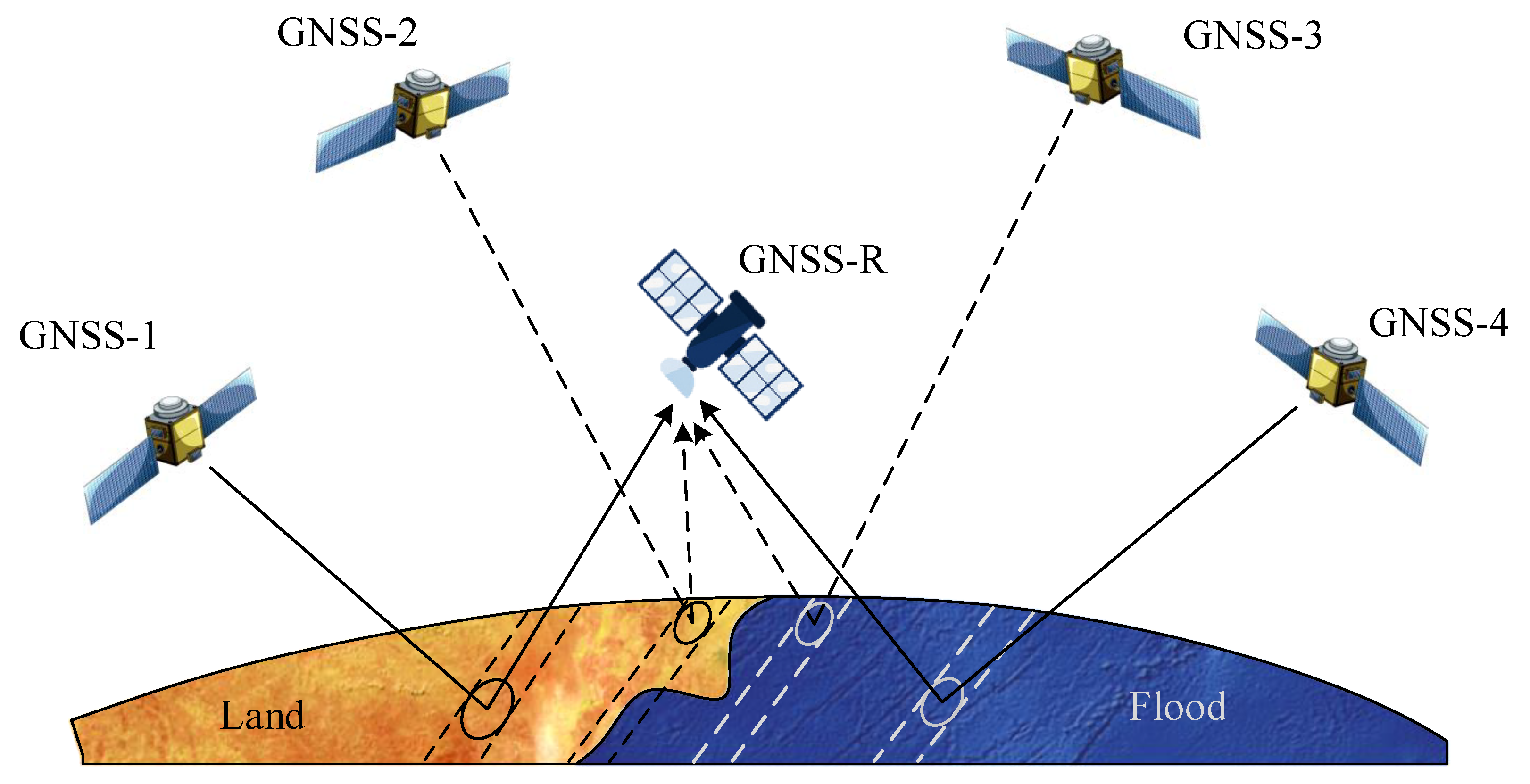
8]. The recently developed Global Navigation Satellite System Reflectometry (GNSS-R) is a novel remote sensing technology for physical parameter inversion by means of GNSS signals reflected from the Earth’s surface [
9,
10,
11]. The Cyclone Global Navigation Satellite System (CYGNSS), launched by NASA, provides openly accessed GNSS-R data, which has been successfully employed in the inversion of sea surface wind speed [
12,
13,
14], soil moisture estimation [
15,
16,
17], flood dynamics monitoring [
7,
18,
19], and other features. The CYGNSS constellation constitutes eight small satellites, on which the receivers are mounted to capture the direct and reflected signals from the navigation satellites. The average revisit period of CYGNSS is only 7 hours, and the spatial resolution is about 3.5 km × 0.5 km on the land surface. Compared with other microwave remote sensing technologies, CYGNSS simultaneously provides observations with higher spatio-temporal resolution, which can be more suitable for dynamic flood monitoring [
18,
20,
21].
Research on GNSS-R flood monitoring first began in 2018. Chew produced a flood inundation map using surface reflectivity (SR) on specular points [
18]. Based on CYGNSS data, Wei Wan and Wentao Yang also conducted flood monitoring by surface reflectivity in 2019 and 2021, respectively [
7,
19]. Furthermore, Unnithan produced large-scale, high-resolution flood inundation maps in 2020 by combining the feature of signal-to-noise ratio in delay-Doppler maps (DDMs) with the topographic information [
22]. Through further research, Chew proposed a theoretical model for flood monitoring based on changes in surface reflectivity in different land cover types in 2020. The research results showed that surface reflectivity was mainly dependent on surface roughness. When flood events occurred, the surface reflectivity in densely vegetated areas greatly varied, while that of the relatively smooth surfaces changed little, both before and after the flood [
20]. Later, Al-Khaldi proposed the power ratio (PR) method in 2021 to detect water bodies using the coherent properties of DDMs from CYGNSS, and found that over 90% of the land surface reflections presented incoherent scattering, while about 80% of the coherent reflections were related to water bodies [
23].
Reviewing the current GNSS-R flood monitoring methods, it is found that most of them are only based on a specific GNSS-R physical feature, such as SR, PR, or signal-to-noise ratio. However, one single GNSS-R feature cannot simultaneously represent the dielectric constant and roughness of the reflective surface. For example, SR is calculated from the power of the specular point [
7], so it mainly represents the dielectric property of the specular point rather than the roughness property of the reflective surface, which is essential for the flood inversion [
24]. Furthermore, the impact of vegetation on GNSS (direct and reflected) signals has not yet been considered in the available literature [
24,
25]. As the primary observation data of GNSS-R, DDMs contain much useful detailed information, such as SR and PR. Some scholars have utilized DDMs-based features for flood monitoring, such as PR and signal-to-noise ratio. However, the valuable information in DDMs has not yet been fully excavated. In recent years, deep learning (DL) has been widely employed to automatically learn feature representations from data and establish the intrinsic relationship between inputs and outputs [
26]. Among a variety of DL algorithms, convolution neural network (CNN) has surpassed most other DL algorithms in two-dimensional image processing due to its local connectivity, weight sharing, and down-sampling strategies, which can reduce the complexity of neural networks and successfully learn feature representations of images [
26]. Moreover, the back propagation (BP) neural networks have powerful nonlinear mapping ability, which is especially suitable for solving the complicated internal mapping problem between one-dimensional input vectors and outputs [
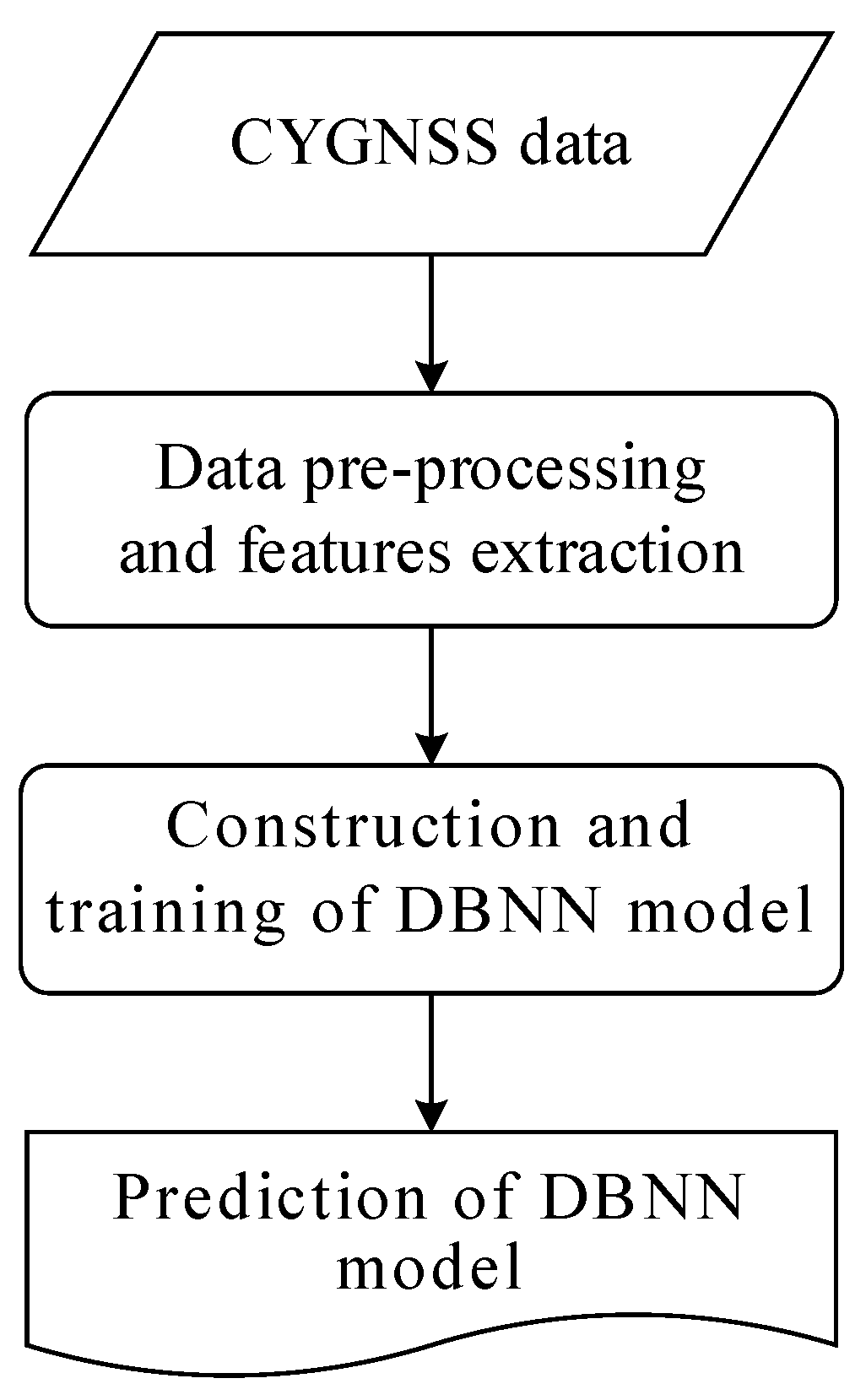
27]. Therefore, by combining a CNN and a BP neural network in parallel, a dual-branch neural network (DBNN) is constructed for better flood monitoring. In the model, the CNN takes two-dimensional DDMs as input and automatically extracts the deep abstract features in DDMs. The BP neural network is fed with the existing typical GNSS-R features and the vegetation information provided by the Soil Moisture Active Passive satellite (SMAP) [
28].
The rest of this paper is organized as follows.
Section 2 provides the descriptions of CYGNSS data, SMAP data, and the study area.
Section 3 introduces the proposed method in detail. The experimental results and discussion are given in
Section 4. Finally,
Section 5 concludes the study.
4. Results and Discussion
Flood monitoring is conducive to understanding the dynamic process of flood occurrence and development, which further helps with disaster prevention, relief, and post-disaster reconstruction. In this study, the experimental district was drawn from South Asia, since it had experienced severe flood incidents in the past decade, and especially in 2020. The effectiveness of the DBNN method was first validated by comparing it with the conventional SR and PR methods, and then the spatio-temporal dynamic process of the flood inundation during the 2020 rainy season was investigated using the proposed method.
4.1. Effectiveness Validation
In this study, the proposed DBNN model is compared with conventional SR and PR methods, which are frequently employed for flood monitoring. The SR can be calculated following the equations in the literature [
20]. Most studies on flood monitoring by SR methods use simple threshold judgments [
18,
19], where the average value of the surface reflectivity of permanent water bodies throughout the study area is used as the classification threshold [
18,
19,
20]. In this study, 15 dB is used as the threshold of the SR method to delineate the flood inundation areas. In addition, the PR is computable according to the literature [
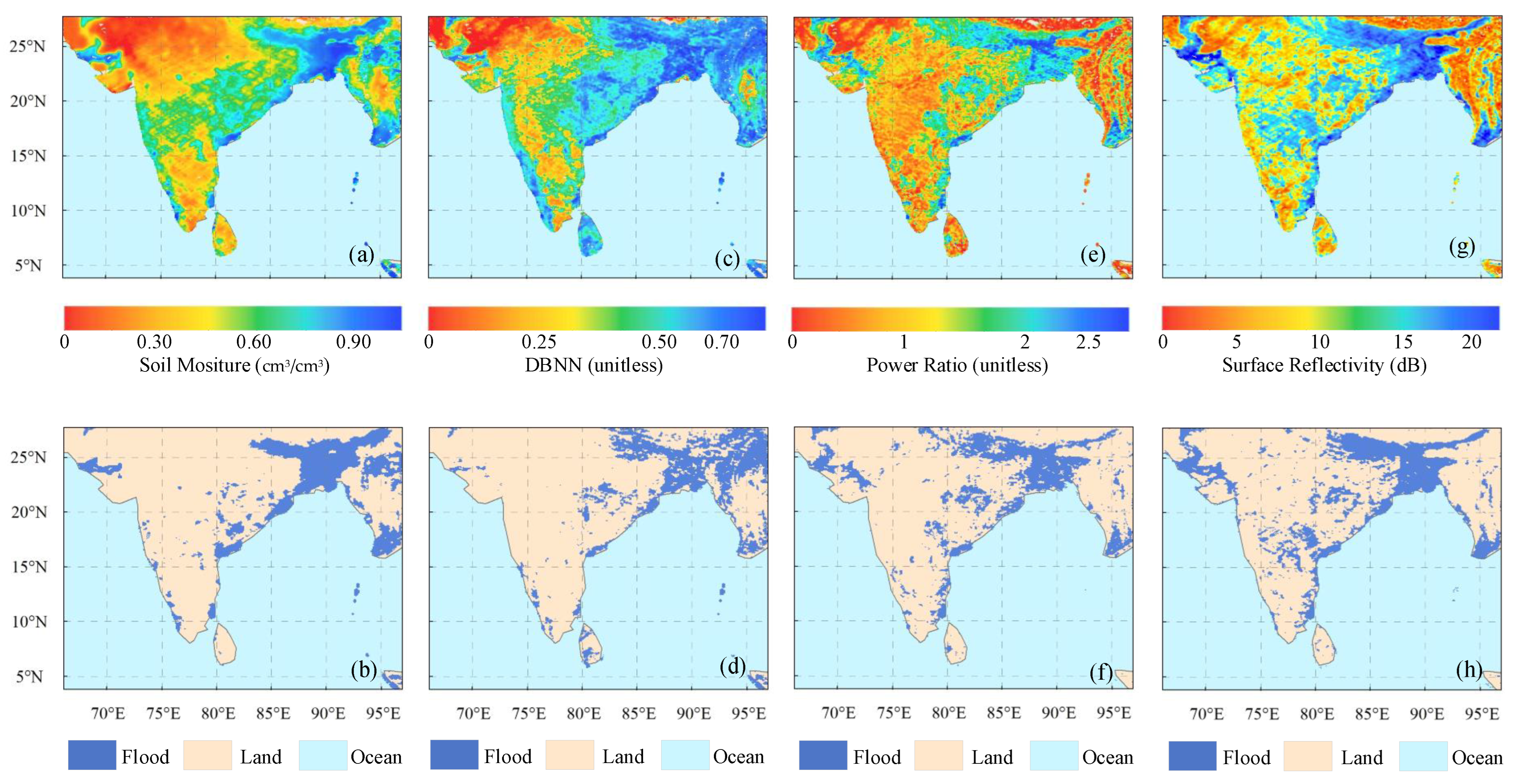
23] and uses the constant value of 2 as the threshold to distinguish between flood or land. In this study, the CYGNSS data ranging from 1 to 15 October 2020 are used as an example to investigate the inundation extent of the study area. In
Figure 7, the inversion and classification results are presented for the flood monitoring in the study area, where the inversion results refer to the continuous values output by the methods, such as the surface reflectivity output of the SR method, and the classification results refer to the extent of flooding and land divided by the thresholds in various methods. In this study, the reference for judging the flood inundation range is obtained by the SMAP soil moisture threshold method due to the lack of measured data of the surface flood extent. Areas with soil moisture greater than 0.4 cm
3/cm
3 are classified as the inundated areas, and areas less than 0.4 cm
3/cm
3 are regarded as non-inundated areas [
43].
Figure 7a shows the continuous spatial distribution of soil moisture, and
Figure 7b shows flood inundation extent extracted by the soil moisture threshold method.
In this study, type I error, type II error, and overall accuracy are used to evaluate the classification results, which can be calculated as follows:
where
and
denote the type I error and type II error, respectively.
C represents the overall accuracy,
a indicates the number of samples that misclassify water bodies as land,
b is the number of samples that misclassify land as water bodies, and
c is the number of correctly classified samples.
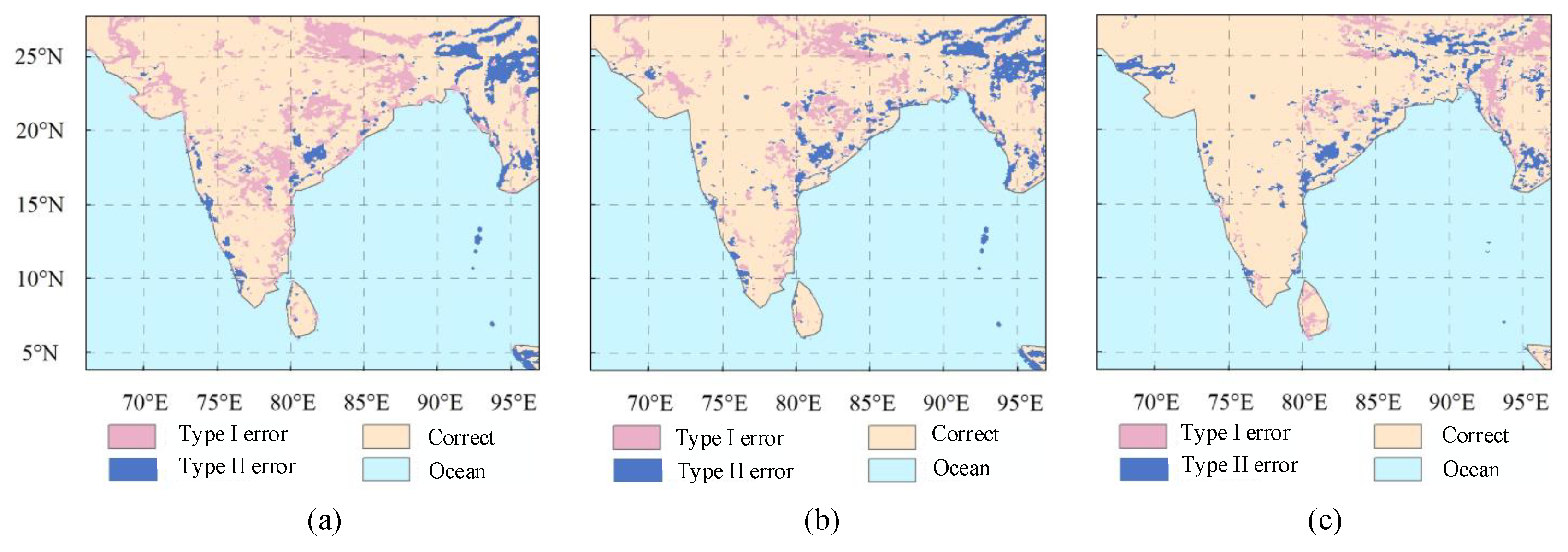
According to flood inundation extent delineated by the SMAP soil moisture threshold method, the overall accuracy, type I error, and type II error of the classification result of SR, PR, and DBNN methods are shown in
Figure 8 and
Table 4, where the DBNN method has the highest inversion accuracy of 85.4%, and the SR and PR methods have inversion accuracies of 80.17% and 81.34%, respectively. In addition, the DBNN method is additionally superior to SR and PR methods in terms of both type I error and type II error, which can be mainly attributed to the following aspects. Firstly, the DBNN model can fully exploit the underlying abstract features from DDMs, while combining the representative features as inputs of the model, which greatly enhances the utilization of GNSS-R data. Secondly, the DBNN model considers the influence of the vegetation factor on GNSS direct signals and reflected signals. However, it is worth noting that the DBNN model is fed with vegetation information from SMAP, whereas the previous SR and PR methods operate based on the CYGNSS data only.
4.2. Spatio-Temporal Analysis of Flood Inundation
In order to provide support for disaster-resistant activities in the study area, it is crucial to understand the development process of flood events. Therefore, the particularly severe flood incident occurring from May to September 2020 is selected as a flood monitoring case, and the experimental results retrieved by the DBNN model on CYGNSS data are shown in
Figure 9 and
Figure 10. Before the onset of the 2020 rainy season in the study area, the regions occupied by water bodies are mainly distributed in coastal areas such as Bangladesh, covering about 6.6% of the total land area. From 20 May 2020, the areas inundated by floods gradually expanded to Nepal and the northeast of India with the arrival of frequent rains. The flooded areas accounted for about 17.9% of the total area on 20 June 2020, and reached 28.7% by 20 July 2020. On 20 August 2020, the areas flooded reached their largest, covering around 34.8% of the total area. After 20 August 2020, the flooded areas gradually reduced because of the decrease in rainfalls. Observing the process of flood changes, we could find the increased area, which refers to the difference between the maximum flood area detected during the rainy season and the area of water bodies before the rainy season, accounting for 28.2% of the total study area, mainly in Nepal and the northeastern states of India. In particular, the proportion of the increased flood area in some states is calculated and summarized in
Table 5, where Bihar State experienced the most severe flooding event with an increased area accounting for 89.92% of the total area, while Magway State had the smallest increased area, only covering about 5.50%.
Through further observation of
Figure 9 and
Figure 10, it can be found that the flooded areas are mostly located in Bangladesh, Nepal, and northeast of India, which is mainly caused by three factors; i.e., the large quantities of water vapor carried by the southwest monsoons, as well as the influence of topography and water systems. In terms of topography, the region is located at the southern foothills of the Himalayas and on the windward slope of the southwest monsoons. When the southwest monsoon is blocked by the northern mountains, it is forced to lift up and form topographic rain, leading to high rainfall in the study area. In terms of the water system, rainwater from the northern foothills is usually collected in the northeast of the study area, due to the low topography and dense river networks, making the region more vulnerable to the threat of flooding.
4.3. Discussion
Compared to SMAP data, the regions with more errors in the inversion results of CYGNSS data are mainly located in high altitude and inland permanent water regions, such as the Western Ghats and the Malwa plateau. The reason for such errors is that CYGNSS uses the DTU10 digital elevation model to calibrate the locations of specular points [
23], which does not sufficiently consider the effect of land topography, resulting in high errors in the estimated positions of specular points with altitudes greater than 600 m on land. In addition, the difference in spatial resolution between CYGNSS data and SMAP data can also increase errors in the inversion results. For example, a small area of water may be identified by CYGNSS data, but not by SMAP data with a lower spatial resolution, which will increase the errors in inversion results.
Although the DBNN method could achieve a relatively higher inversion accuracy in flood monitoring, its accuracy would decrease in some special areas, such as flat areas. The DBNN method may misclassify the flat areas as water bodies because both of them have less surface roughness, thus producing similar coherent DDMs. In future research, inversion accuracy in flat areas is expected to be improved by extracting new physical features. In addition, considering that the DBNN method needs to learn an abundance of parameters and takes a large amount of computation to construct the optimal neural network model compared with the traditional methods, more lightweight models for flood monitoring should be anticipated to highly improve their operational efficiency in the future.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}