
Logging Trail Segmentation via a Novel U-Net Convolutional Neural Network and High-Density Laser Scanning Data


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Description of the Study Area
2.2. Data
2.3. Training Datasets
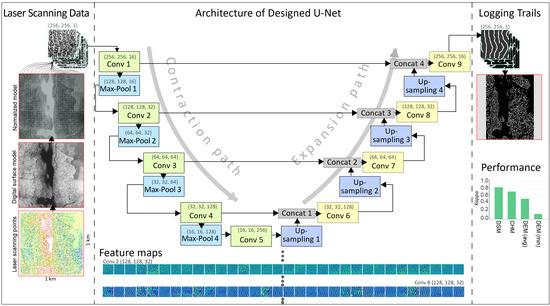
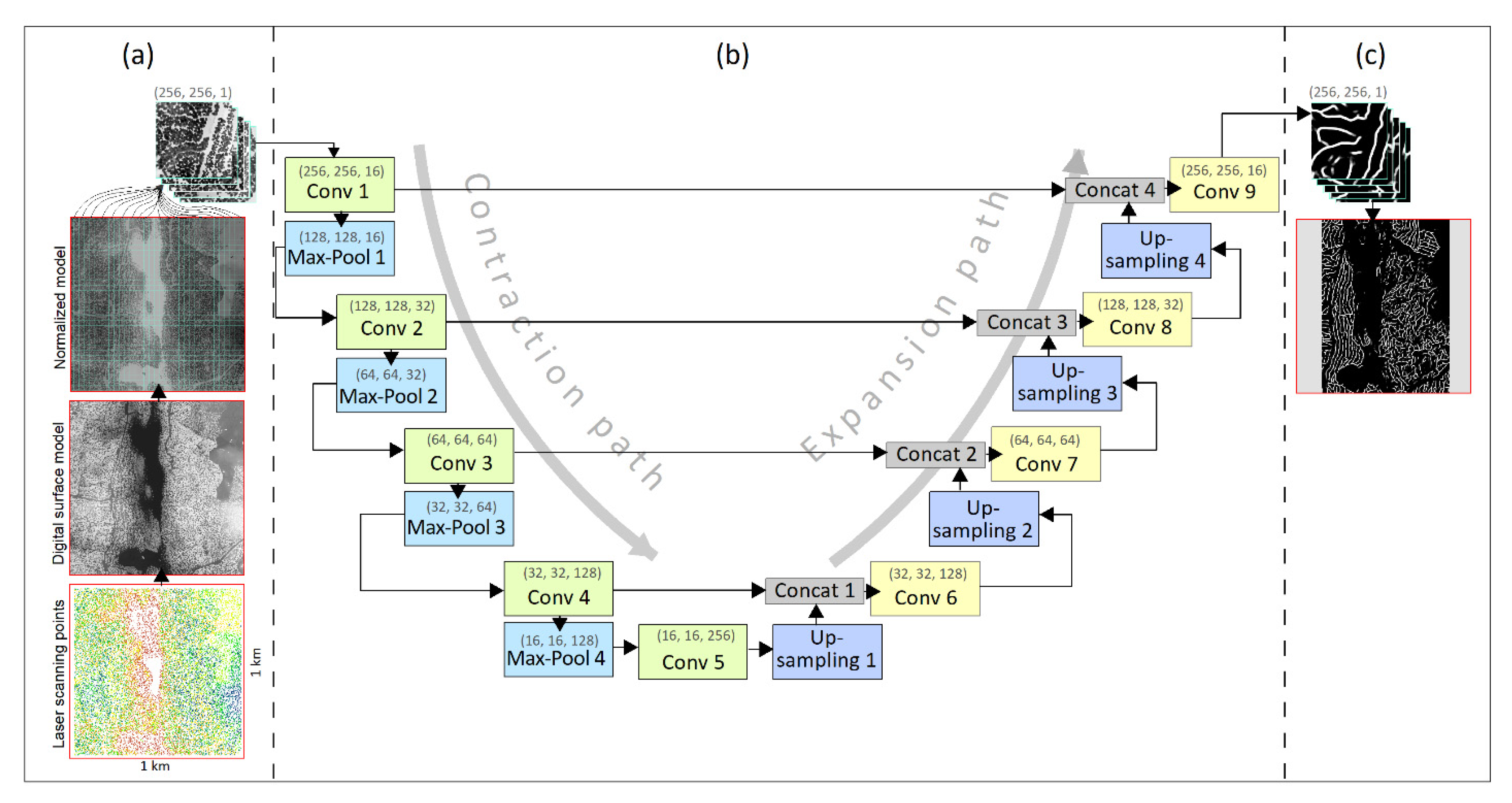
2.4. U-Net Architecture
2.5. Accuracy Assessment
2.5.1. Collecting Testing Data from Logging Trails
2.5.2. Accuracy Metrics
3. Results
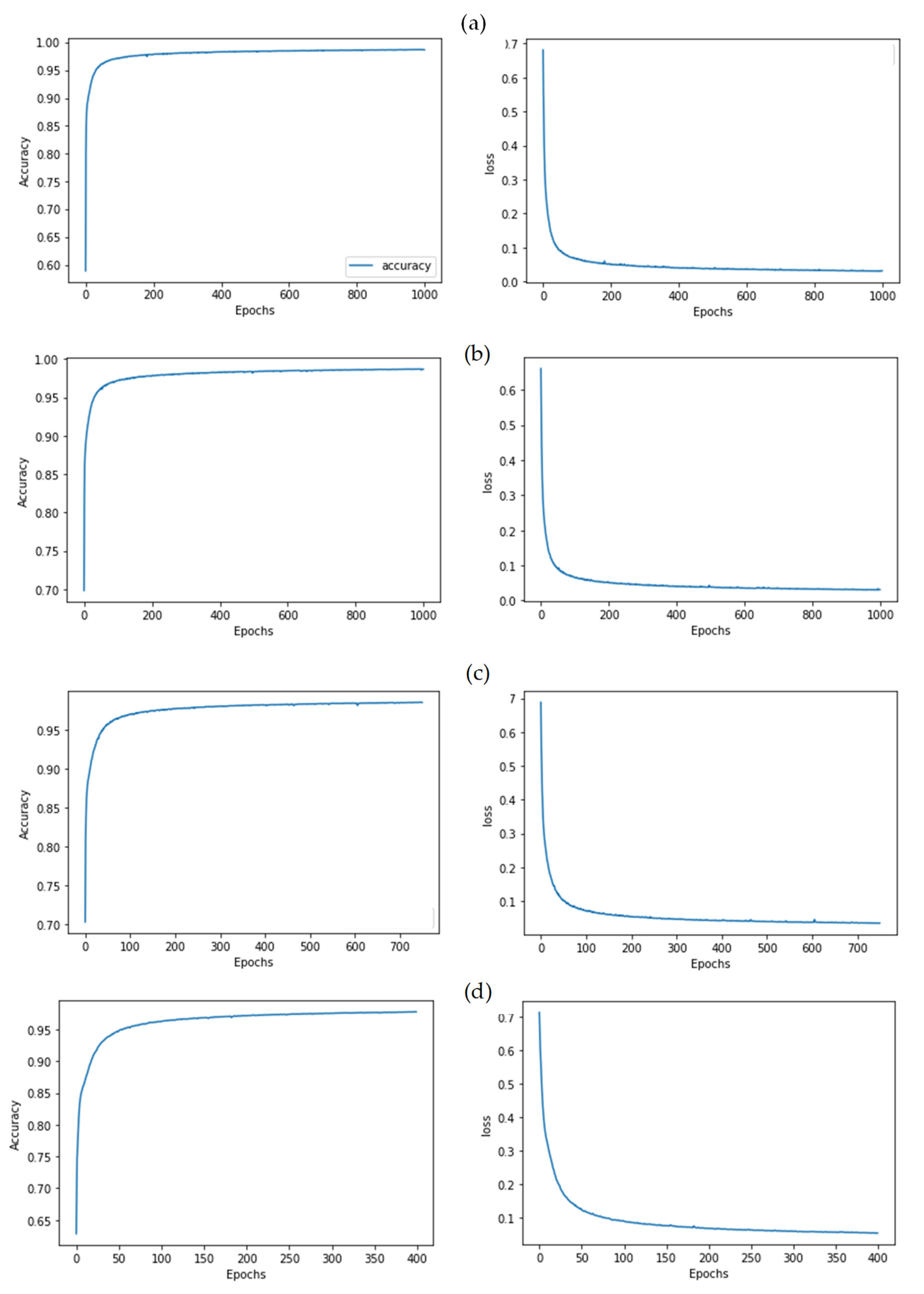
3.1. Performance of Trained Models
3.1.1. Detection Logging Trails in the Entire Forest
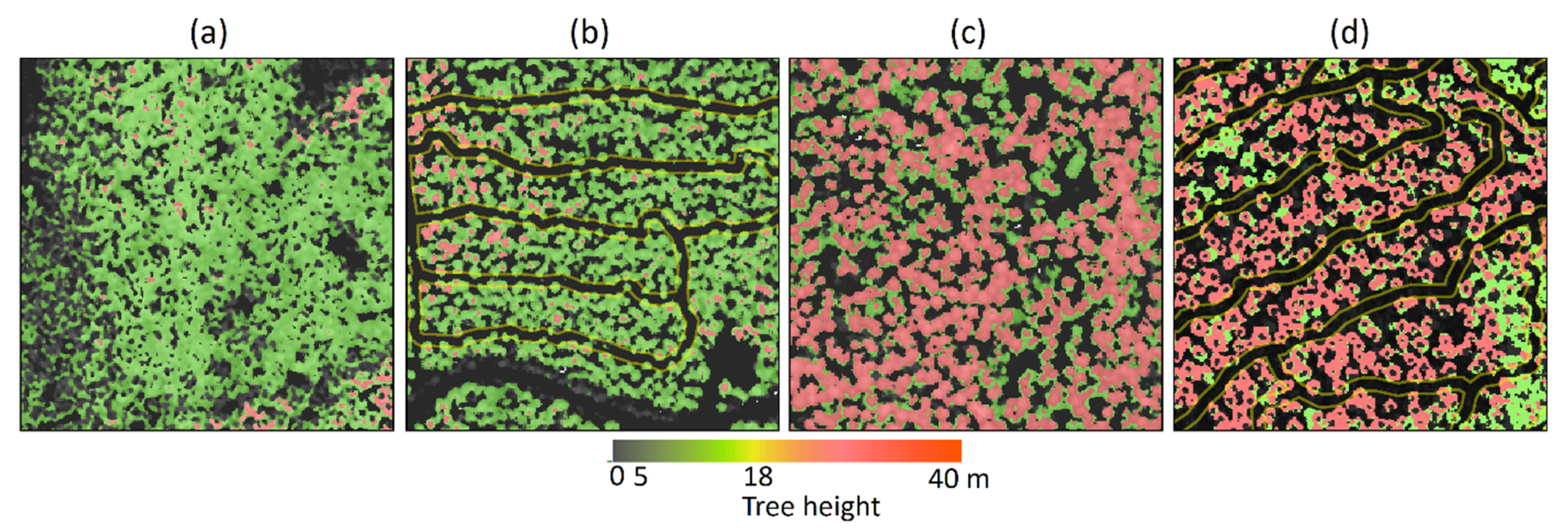
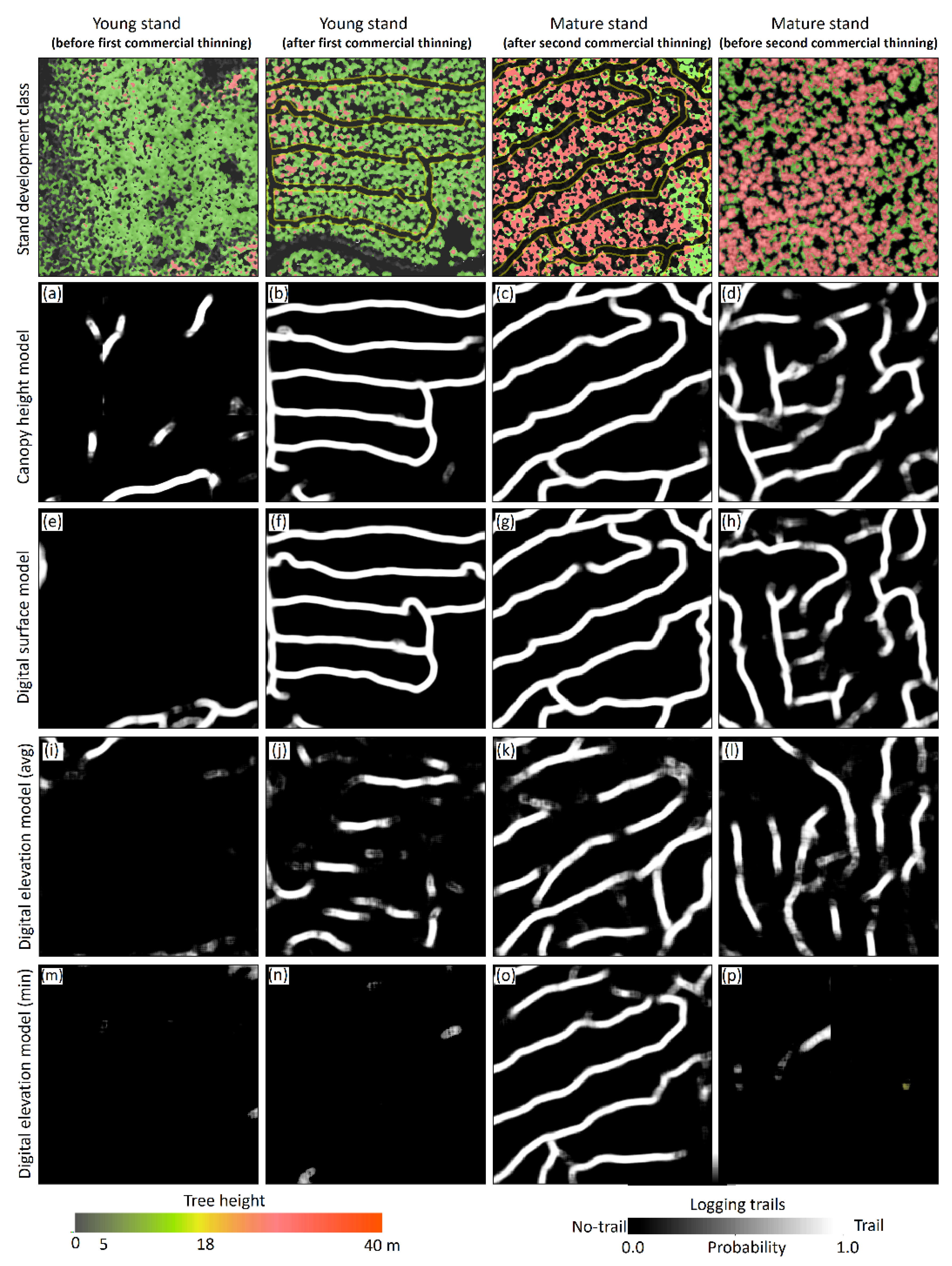
3.1.2. Detection Logging Trails in Different Stages of Commercial Thinning
3.2. Prediction of Logging Trails
4. Discussion
4.1. Distinguishing Logging Trails from Non-Logging Trails Using U-Net
4.2. Detection of Logging Trails in Different Stages of Commercial Thinning
4.3. Geometric Properties of the Predicted Logging Trails
4.4. DEM Drawbacks in Detecting Logging Trails
4.5. Applications
4.6. Outlook
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Kernels | 16, 32, 64, 128, 256 |
| Activation | ReLU |
| Weight initializer | HeNormal |
| Max-pooling size | (2, 2) |
| Optimizer | Adam (β1 = 0.9, β2 = 0.999, ε = 1 × 10−7) |
| Learning rate | 0.0008 |
| Batch size | 32 |
| Dropout rate | [0.2, 0.4] |

References
- Uusitalo, J. Introduction to Forest Operations and Technology; JVP Forest Systems OY: Helsinki, Finland, 2010; ISBN 978-952-92-5269-5. [Google Scholar]
- Pukkala, T.; Lähde, E.; Laiho, O. Continuous Cover Forestry in Finland—Recent Research Results. In Continuous Cover Forestry; Pukkala, T., von Gadow, K., Eds.; Springer: Dordrecht, The Netherlands, 2012; pp. 85–128. ISBN 978-94-007-2201-9. [Google Scholar]
- Mielikaeinen, K.; Hakkila, P. Review of wood fuel from precommercial thinning and plantation cleaning in Finland. In Wood Fuel from Early Thinning and Plantation Cleaning: An International Review; Puttock, D., Richardson, J., Eds.; Vantaa Research Centre, Finnish Forest Research Institute: Vantaa, Finland, 1998; pp. 29–36. ISBN 9514016009. [Google Scholar]
- Leinonen, A. Harvesting Technology of Forest Residues for Fuel in the USA and Finland; Valopaino Oy: Helsinki, Finland, 2004; ISBN 951-38-6212-7. [Google Scholar]
- Äijälä, O.; Koistinen, A.; Sved, J.; Vanhatalo, K.; Väisänen, P. Recommendations for Forest Management; Tapio Oy: Helsinki, Finland, 2019; Available online: https://tapio.fi/wp-content/uploads/2020/09/Metsanhoidon_suositukset_Tapio_2019.pdf (accessed on 31 May 2021).
- Maltamo, M.; Næsset, E.; Vauhkonen, J. Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; ISBN 978-94-017-8662-1. [Google Scholar]
- Saukkola, A.; Melkas, T.; Riekki, K.; Sirparanta, S.; Peuhkurinen, J.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Predicting Forest Inventory Attributes Using Airborne Laser Scanning, Aerial Imagery, and Harvester Data. Remote Sens. 2019, 11, 797. [Google Scholar] [CrossRef] [Green Version]
- Lin, C. Improved derivation of forest stand canopy height structure using harmonized metrics of full-waveform data. Remote Sens. Environ. 2019, 235, 111436. [Google Scholar] [CrossRef]
- Lee, H.; Slatton, K.C.; Jhee, H. Detecting forest trails occluded by dense canopies using ALSM data. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 25–29 July 2005; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2005; pp. 3587–3590, ISBN 0-7803-9050-4. Available online: https://ieeexplore.ieee.org/document/1526623 (accessed on 5 October 2021).
- Sherba, J.; Blesius, L.; Davis, J. Object-Based Classification of Abandoned Logging Roads under Heavy Canopy Using LiDAR. Remote Sens. 2014, 6, 4043–4060. [Google Scholar] [CrossRef] [Green Version]
- Ferraz, A.; Mallet, C.; Chehata, N. Large-scale road detection in forested mountainous areas using airborne topographic lidar data. ISPRS J. Photogramm. Remote Sens. 2016, 112, 23–36. [Google Scholar] [CrossRef]
- Li, C.; Ma, L.; Zhou, M.; Zhu, X. Study on Road Detection Method from Full-Waveform LiDAR Data in Forested Area. In Proceedings of the Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), Shanghai, China, 2–4 November 2016. [Google Scholar]
- Hrůza, P.; Mikita, T.; Tyagur, N.; Krejza, Z.; Cibulka, M.; Procházková, A.; Patočka, Z. Detecting Forest Road Wearing Course Damage Using Different Methods of Remote Sensing. Remote Sens. 2018, 10, 492. [Google Scholar] [CrossRef] [Green Version]
- Prendes, C.; Buján, S.; Ordoñez, C.; Canga, E. Large scale semi-automatic detection of forest roads from low density LiDAR data on steep terrain in Northern Spain. iForest 2019, 12, 366–374. [Google Scholar] [CrossRef] [Green Version]
- Waga, K.; Tompalski, P.; Coops, N.C.; White, J.C.; Wulder, M.A.; Malinen, J.; Tokola, T. Forest Road Status Assessment Using Airborne Laser Scanning. For. Sci. 2020, 66, 501–508. [Google Scholar] [CrossRef]
- Buján, S.; Guerra-Hernández, J.; González-Ferreiro, E.; Miranda, D. Forest Road Detection Using LiDAR Data and Hybrid Classification. Remote Sens. 2021, 13, 393. [Google Scholar] [CrossRef]
- Kaiser, J.V.; Stow, D.A.; Cao, L. Evaluation of Remote Sensing Techniques for Mapping Transborder Trails. Photogramm. Eng. Remote Sens. 2004, 70, 1441–1447. [Google Scholar] [CrossRef]
- Hoeser, T.; Kuenzer, C. Object Detection and Image Segmentation with Deep Learning on Earth Observation Data: A Review—Part I: Evolution and Recent Trends. Remote Sens. 2020, 12, 1667. [Google Scholar] [CrossRef]
- Hoeser, T.; Bachofer, F.; Kuenzer, C. Object Detection and Image Segmentation with Deep Learning on Earth Observation Data: A Review—Part II: Applications. Remote Sens. 2020, 12, 3053. [Google Scholar] [CrossRef]
- Kneusel, R.T. Practical Deep Learning: A Python-Based Introduction, 1st ed.; No Starch Press Inc.: San Francisco, CA, USA, 2021; ISBN 978-1-7185-0075-4. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. 2014. Available online: https://arxiv.org/pdf/1409.1556 (accessed on 12 August 2021).
- Constantin, A.; Ding, J.-J.; Lee, Y.-C. Accurate Road Detection from Satellite Images Using Modified U-net. In Proceedings of the IEEE Asia Pacific Conference on Circuits and Systems (APCCAS), Chengdu, China, 26–30 October 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 423–426, ISBN 978-1-5386-8240-1. [Google Scholar]
- Shi, Q.; Liu, X.; Li, X. Road Detection from Remote Sensing Images by Generative Adversarial Networks. IEEE Access 2018, 6, 25486–25494. [Google Scholar] [CrossRef]
- Buslaev, A.; Seferbekov, S.; Iglovikov, V.; Shvets, A. Fully Convolutional Network for Automatic Road Extraction from Satellite Imagery. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 197–1973, ISBN 978-1-5386-6100-0. [Google Scholar]
- Kestur, R.; Farooq, S.; Abdal, R.; Mehraj, E.; Narasipura, O.; Mudigere, M. UFCN: A fully convolutional neural network for road extraction in RGB imagery acquired by remote sensing from an unmanned aerial vehicle. J. Appl. Remote Sens. 2018, 12, 1. [Google Scholar] [CrossRef]
- He, H.; Yang, D.; Wang, S.; Wang, S.; Liu, X. Road segmentation of cross-modal remote sensing images using deep segmentation network and transfer learning. Ind. Robot. 2019, 46, 384–390. [Google Scholar] [CrossRef]
- Xin, J.; Zhang, X.; Zhang, Z.; Fang, W. Road Extraction of High-Resolution Remote Sensing Images Derived from DenseUNet. Remote Sens. 2019, 11, 2499. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Xie, Z.; Feng, Y.; Chen, Z. Road Extraction from High-Resolution Remote Sensing Imagery Using Deep Learning. Remote Sens. 2018, 10, 1461. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Liu, Q.; Wang, Y. Road Extraction by Deep Residual U-Net. IEEE Geosci. Remote Sens. Lett. 2018, 15, 749–753. [Google Scholar] [CrossRef] [Green Version]
- Doshi, J. Residual Inception Skip Network for Binary Segmentation. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 206–2063, ISBN 978-1-5386-6100-0. [Google Scholar]
- Varia, N.; Dokania, A.; Senthilnath, J. DeepExt: A Convolution Neural Network for Road Extraction using RGB images captured by UAV. In Proceedings of the 2018 IEEE Symposium Series on Computational Intelligence (SSCI), Bangalore, India, 18–21 November 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 1890–1895, ISBN 978-1-5386-9276-9. [Google Scholar]
- Li, Y.; Xu, L.; Rao, J.; Guo, L.; Yan, Z.; Jin, S. A Y-Net deep learning method for road segmentation using high-resolution visible remote sensing images. Remote Sens. Lett. 2019, 10, 381–390. [Google Scholar] [CrossRef]
- Panboonyuen, T.; Jitkajornwanich, K.; Lawawirojwong, S.; Srestasathiern, P.; Vateekul, P. Road Segmentation of Remotely-Sensed Images Using Deep Convolutional Neural Networks with Landscape Metrics and Conditional Random Fields. Remote Sens. 2017, 9, 680. [Google Scholar] [CrossRef] [Green Version]
- Cheng, G.; Wang, Y.; Xu, S.; Wang, H.; Xiang, S.; Pan, C. Automatic Road Detection and Centerline Extraction via Cascaded End-to-End Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3322–3337. [Google Scholar] [CrossRef]
- Fujimoto, A.; Haga, C.; Matsui, T.; Machimura, T.; Hayashi, K.; Sugita, S.; Takagi, H. An End to End Process Development for UAV-SfM Based Forest Monitoring: Individual Tree Detection, Species Classification and Carbon Dynamics Simulation. Forests 2019, 10, 680. [Google Scholar] [CrossRef] [Green Version]
- Miyoshi, G.T.; Arruda, M.d.S.; Osco, L.P.; Marcato Junior, J.; Gonçalves, D.N.; Imai, N.N.; Tommaselli, A.M.G.; Honkavaara, E.; Gonçalves, W.N. A Novel Deep Learning Method to Identify Single Tree Species in UAV-Based Hyperspectral Images. Remote Sens. 2020, 12, 1294. [Google Scholar] [CrossRef] [Green Version]
- Ocer, N.E.; Kaplan, G.; Erdem, F.; Kucuk Matci, D.; Avdan, U. Tree extraction from multi-scale UAV images using Mask R-CNN with FPN. Remote Sens. Lett. 2020, 11, 847–856. [Google Scholar] [CrossRef]
- Korznikov, K.A.; Kislov, D.E.; Altman, J.; Doležal, J.; Vozmishcheva, A.S.; Krestov, P.V. Using U-Net-Like Deep Convolutional Neural Networks for Precise Tree Recognition in Very High Resolution RGB (Red, Green, Blue) Satellite Images. Forests 2021, 12, 66. [Google Scholar] [CrossRef]
- Schiefer, F.; Kattenborn, T.; Frick, A.; Frey, J.; Schall, P.; Koch, B.; Schmidtlein, S. Mapping forest tree species in high resolution UAV-based RGB-imagery by means of convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2020, 170, 205–215. [Google Scholar] [CrossRef]
- Xi, Z.; Hopkinson, C.; Rood, S.B.; Peddle, D.R. See the forest and the trees: Effective machine and deep learning algorithms for wood filtering and tree species classification from terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2020, 168, 1–16. [Google Scholar] [CrossRef]
- La Rosa, L.E.C.; Sothe, C.; Feitosa, R.Q.; de Almeida, C.M.; Schimalski, M.B.; Oliveira, D.A.B. Multi-task fully convolutional network for tree species mapping in dense forests using small training hyperspectral data. ISPRS J. Photogramm. Remote Sens. 2021, 179, 35–49. [Google Scholar] [CrossRef]
- Seidel, D.; Annighöfer, P.; Thielman, A.; Seifert, Q.E.; Thauer, J.-H.; Glatthorn, J.; Ehbrecht, M.; Kneib, T.; Ammer, C. Predicting Tree Species From 3D Laser Scanning Point Clouds Using Deep Learning. Front. Plant Sci. 2021, 12, 635440. [Google Scholar] [CrossRef]
- Ercanlı, İ. Innovative deep learning artificial intelligence applications for predicting relationships between individual tree height and diameter at breast height. For. Ecosyst. 2020, 7, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Qi, Y.; Dong, X.; Chen, P.; Lee, K.-H.; Lan, Y.; Lu, X.; Jia, R.; Deng, J.; Zhang, Y. Canopy Volume Extraction of Citrus reticulate Blanco cv. Shatangju Trees Using UAV Image-Based Point Cloud Deep Learning. Remote Sens. 2021, 13, 3437. [Google Scholar] [CrossRef]
- Deng, X.; Tong, Z.; Lan, Y.; Huang, Z. Detection and Location of Dead Trees with Pine Wilt Disease Based on Deep Learning and UAV Remote Sensing. AgriEngineering 2020, 2, 19. [Google Scholar] [CrossRef]
- Tran, D.Q.; Park, M.; Jung, D.; Park, S. Damage-Map Estimation Using UAV Images and Deep Learning Algorithms for Disaster Management System. Remote Sens. 2020, 12, 4169. [Google Scholar] [CrossRef]
- Kislov, D.E.; Korznikov, K.A.; Altman, J.; Vozmishcheva, A.S.; Krestov, P.V. Extending deep learning approaches for forest disturbance segmentation on very high-resolution satellite images. Remote Sens. Ecol. Conserv. 2021, 7, 355–368. [Google Scholar] [CrossRef]
- Qin, J.; Wang, B.; Wu, Y.; Lu, Q.; Zhu, H. Identifying Pine Wood Nematode Disease Using UAV Images and Deep Learning Algorithms. Remote Sens. 2021, 13, 162. [Google Scholar] [CrossRef]
- Wang, M.; Li, R. Segmentation of High Spatial Resolution Remote Sensing Imagery Based on Hard-Boundary Constraint and Two-Stage Merging. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5712–5725. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhu, Q.; Zhang, L. Scene Classification Based on the Multifeature Fusion Probabilistic Topic Model for High Spatial Resolution Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6207–6222. [Google Scholar] [CrossRef]
- Abdollahi, A.; Pradhan, B.; Shukla, N.; Chakraborty, S.; Alamri, A. Deep Learning Approaches Applied to Remote Sensing Datasets for Road Extraction: A State-Of-The-Art Review. Remote Sens. 2020, 12, 1444. [Google Scholar] [CrossRef]
- Caltagirone, L.; Scheidegger, S.; Svensson, L.; Wahde, M. Fast LIDAR-based road detection using fully convolutional neural networks. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1019–1024, ISBN 978-1-5090-4804-5. [Google Scholar]
- Verschoof-van der Vaart, W.B.; Landauer, J. Using CarcassonNet to automatically detect and trace hollow roads in LiDAR data from the Netherlands. J. Cult. Herit. 2021, 47, 143–154. [Google Scholar] [CrossRef]
- Staaf, K.A.G.; Wiksten, N.A. Tree Harvesting Techniques; Nijhoff: Dordrecht, The Netherlands, 1984; ISBN 978-90-247-2994-4. [Google Scholar]
- National Land Survey of Finland (NLS). Laser Scanning Data 5 p. Available online: https://www.maanmittauslaitos.fi/en/maps-and-spatial-data/expert-users/product-descriptions/laser-scanning-data-5-p (accessed on 6 May 2021).
- National Land Survey of Finland (NLS). NLS Orthophotos. Available online: https://tiedostopalvelu.maanmittauslaitos.fi/tp/kartta?lang=en (accessed on 1 May 2021).
- Esri. Lidar Solutions in ArcGIS: Estimating Forest Canopy Density and Height. Available online: https://desktop.arcgis.com/en/arcmap/latest/manage-data/las-dataset/lidar-solutions-estimating-forest-density-and-height.htm (accessed on 1 June 2021).
- Esri. Lidar Solutions in ArcGIS: Creating Raster DEMs and DSMs from Large Lidar Point Collections. Available online: https://desktop.arcgis.com/en/arcmap/latest/manage-data/las-dataset/lidar-solutions-creating-raster-dems-and-dsms-from-large-lidar-point-collections.htm (accessed on 1 June 2021).
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. 18 May 2015. Available online: http://arxiv.org/pdf/1505.04597v1 (accessed on 15 July 2021).
- Li, Y.; Li, W.; Xiong, J.; Xia, J.; Xie, Y. Comparison of Supervised and Unsupervised Deep Learning Methods for Medical Image Synthesis between Computed Tomography and Magnetic Resonance Images. Biomed. Res. Int. 2020, 2020, 5193707. [Google Scholar] [CrossRef]
- Chollet, F. Deep Learning with Python; Manning Publications Co.: Shelter Island, NY, USA, 2018; ISBN 1617294438. [Google Scholar]
- TensorFlow. Introduction to the Keras Tuner. Available online: https://www.tensorflow.org/tutorials/keras/keras_tuner (accessed on 21 August 2021).
- Wlodarczak, P. Machine Learning and Its Applications, 1st ed.; CRC Press: Boca Raton, FL, USA, 2019; ISBN 978-1-138-32822-8. [Google Scholar]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159. [Google Scholar] [CrossRef] [Green Version]
- Costea, D.; Marcu, A.; Leordeanu, M.; Slusanschi, E. Creating Roadmaps in Aerial Images with Generative Adversarial Networks and Smoothing-Based Optimization. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshop (ICCVW), Venice, Italy, 22–29 October 2017; pp. 2100–2109, ISBN 978-1-5386-1034-3. [Google Scholar]
- Kemmerer, J.; Labelle, E.R. Using harvester data from on-board computers: A review of key findings, opportunities and challenges. Eur. J. For. Res. 2021, 140, 1–17. [Google Scholar] [CrossRef]
- Woo, H.; Acuna, M.; Choi, B.; Han, S. FIELD: A Software Tool That Integrates Harvester Data and Allometric Equations for a Dynamic Estimation of Forest Harvesting Residues. Forests 2021, 12, 834. [Google Scholar] [CrossRef]
- Nguyen, M.H. Impacts of Unbalanced Test Data on the Evaluation of Classification Methods. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 497–502. [Google Scholar] [CrossRef]
- Affek, A.N.; Zachwatowicz, M.; Sosnowska, A.; Gerlée, A.; Kiszka, K. Impacts of modern mechanised skidding on the natural and cultural heritage of the Polish Carpathian Mountains. For. Ecol. Manag. 2017, 405, 391–403. [Google Scholar] [CrossRef]
- Picchio, R.; Mederski, P.S.; Tavankar, F. How and How Much, Do Harvesting Activities Affect Forest Soil, Regeneration and Stands? Curr. For. Rep. 2020, 6, 115–128. [Google Scholar] [CrossRef] [Green Version]
- Burley, J.; Evans, J.; Youngquist, J. Encyclopedia of Forest Sciences; Elsevier: Amsterdam, The Netherlands; Oxford, UK, 2004; ISBN 0-12-145160-7. [Google Scholar]
- Sirén, M.; Ala-Ilomäki, J.; Mäkinen, H.; Lamminen, S.; Mikkola, T. Harvesting damage caused by thinning of Norway spruce in unfrozen soil. Int. J. For. Eng. 2013, 24, 60–75. [Google Scholar] [CrossRef]
- Carvalho, O.L.F.d.; de Carvalho Júnior, O.A.; Albuquerque, A.O.d.; Bem, P.P.d.; Silva, C.R.; Ferreira, P.H.G.; Moura, R.d.S.d.; Gomes, R.A.T.; Guimarães, R.F.; Borges, D.L. Instance Segmentation for Large, Multi-Channel Remote Sensing Imagery Using Mask-RCNN and a Mosaicking Approach. Remote Sens. 2021, 13, 39. [Google Scholar] [CrossRef]









| Metric | CHM | DSM | DEMavg | DEMmin |
|---|---|---|---|---|
| Cohen’s kappa | 0.734 | 0.846 | 0.528 | 0.136 |
| Overall accuracy | 0.867 | 0.923 | 0.736 | 0.553 |
| IoU | 0.782 | 0.867 | 0.587 | 0.155 |
| Recall | 0.908 | 0.959 | 0.649 | 0.157 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdi, O.; Uusitalo, J.; Kivinen, V.-P. Logging Trail Segmentation via a Novel U-Net Convolutional Neural Network and High-Density Laser Scanning Data. Remote Sens. 2022, 14, 349. https://doi.org/10.3390/rs14020349
Abdi O, Uusitalo J, Kivinen V-P. Logging Trail Segmentation via a Novel U-Net Convolutional Neural Network and High-Density Laser Scanning Data. Remote Sensing. 2022; 14(2):349. https://doi.org/10.3390/rs14020349
Chicago/Turabian StyleAbdi, Omid, Jori Uusitalo, and Veli-Pekka Kivinen. 2022. "Logging Trail Segmentation via a Novel U-Net Convolutional Neural Network and High-Density Laser Scanning Data" Remote Sensing 14, no. 2: 349. https://doi.org/10.3390/rs14020349