
Object-Based High-Rise Building Detection Using Morphological Building Index and Digital Map



Abstract
:1. Introduction
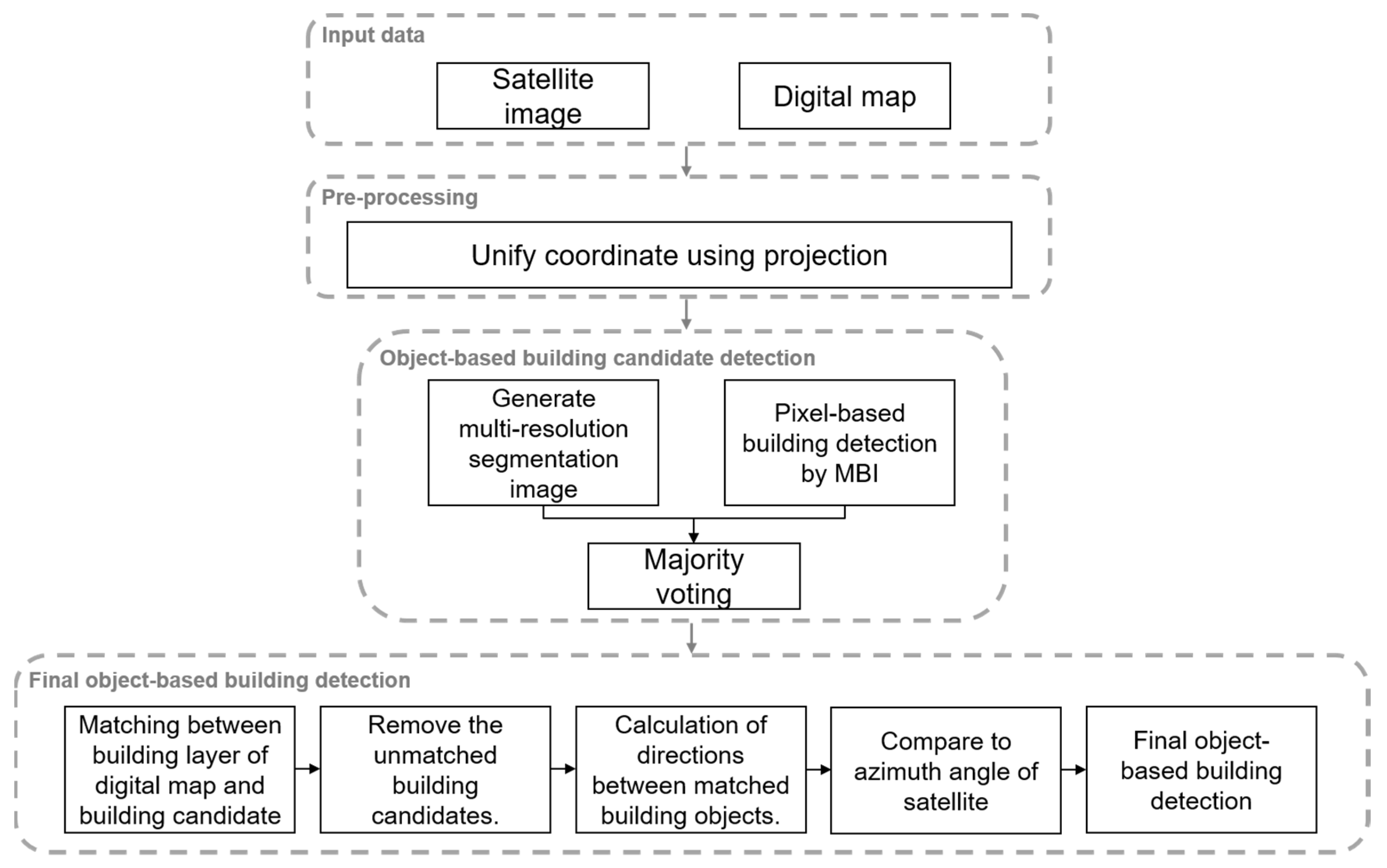
2. Methods and Materials
2.1. Multiresolution Segmentation
2.2. Object-Based High-Rise Building Candidate Detection Using the Morphological Building Index
2.2.1. Morphological Building Index
2.2.2. Majority Voting
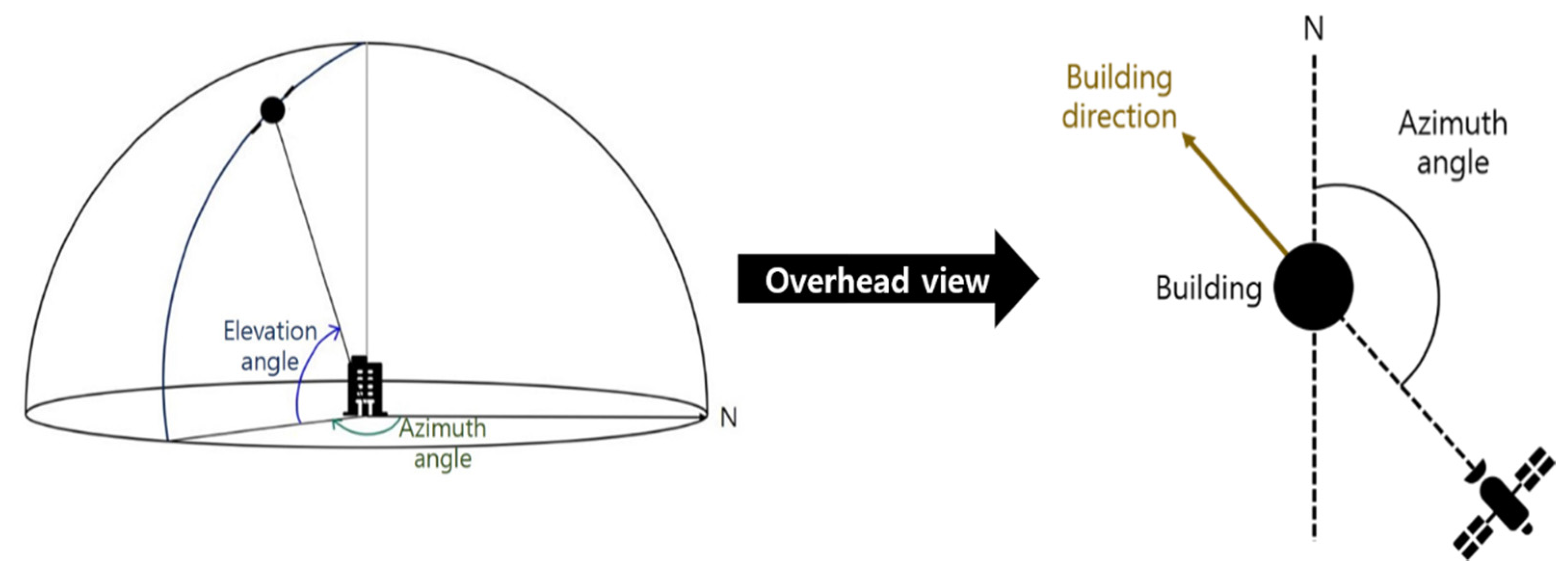
2.3. Final Object-Based High-Rise Building Detection Using Digital Maps
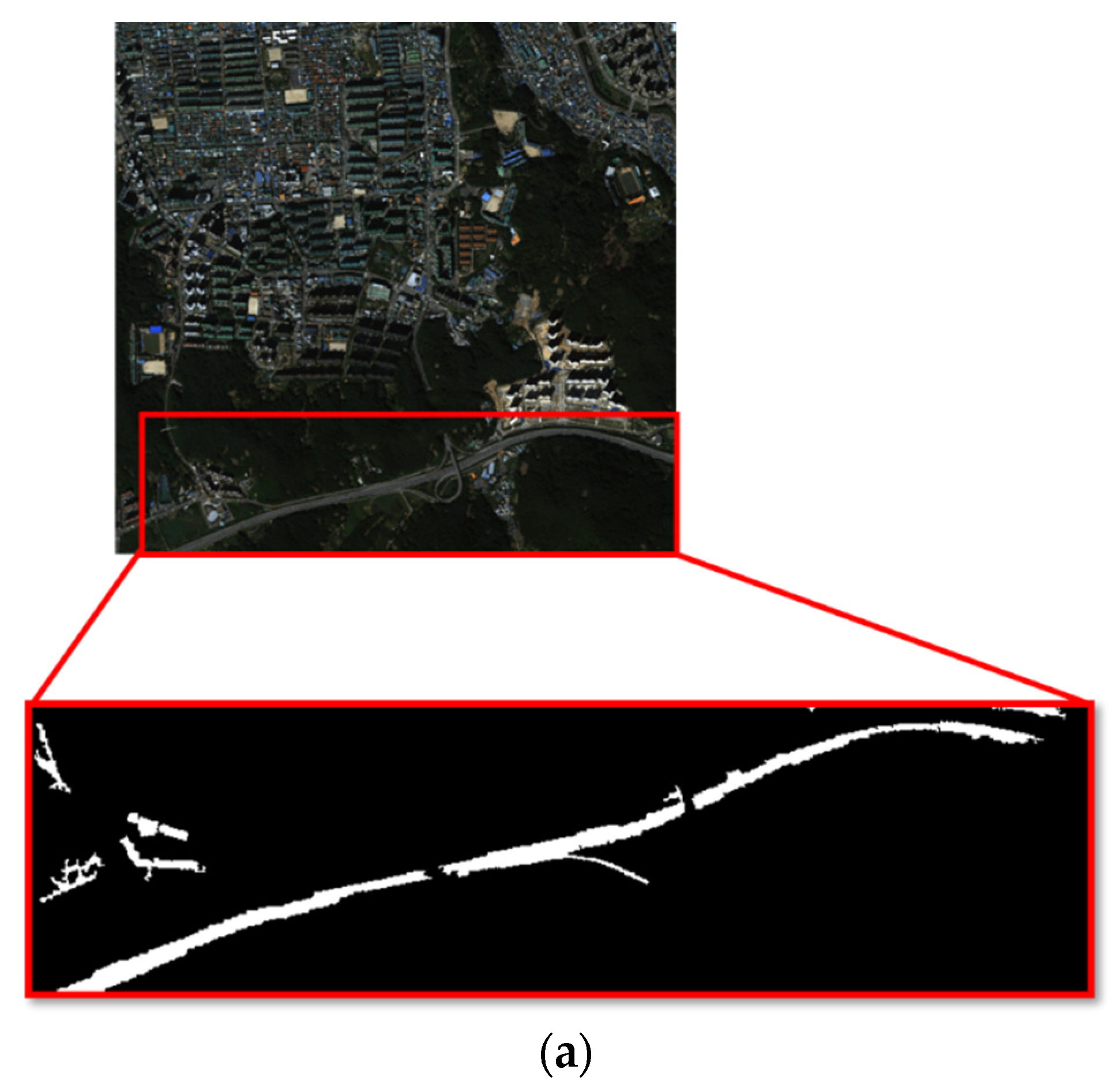
2.4. Research Area and Data
3. Results and Discussion
3.1. Evaluation Criteria
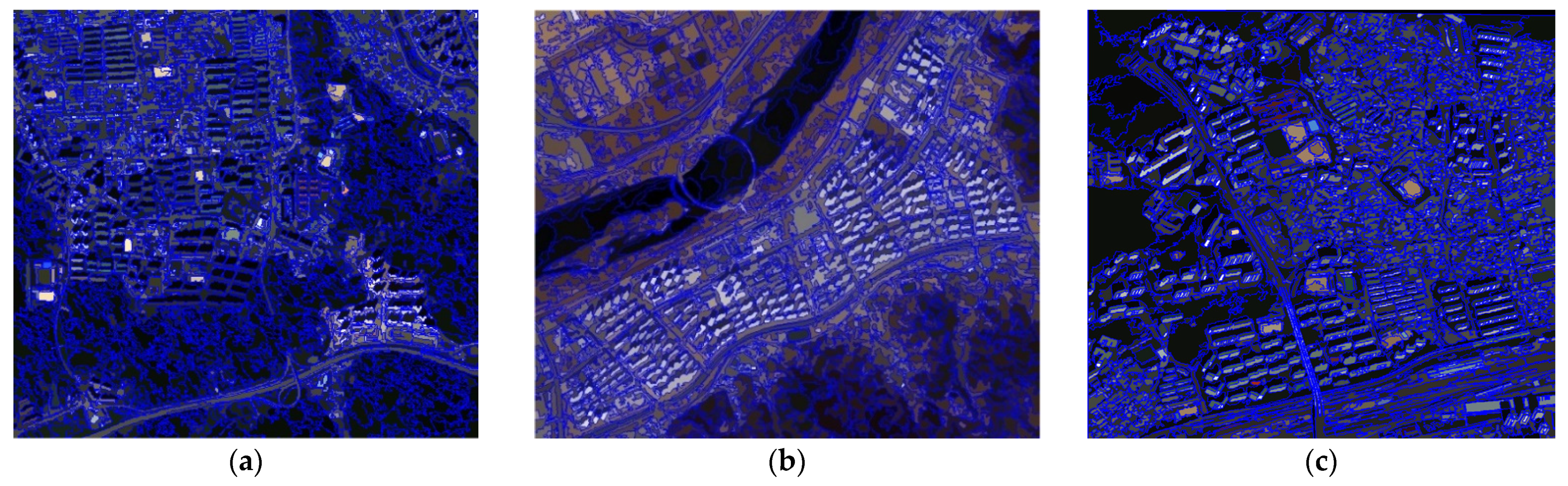
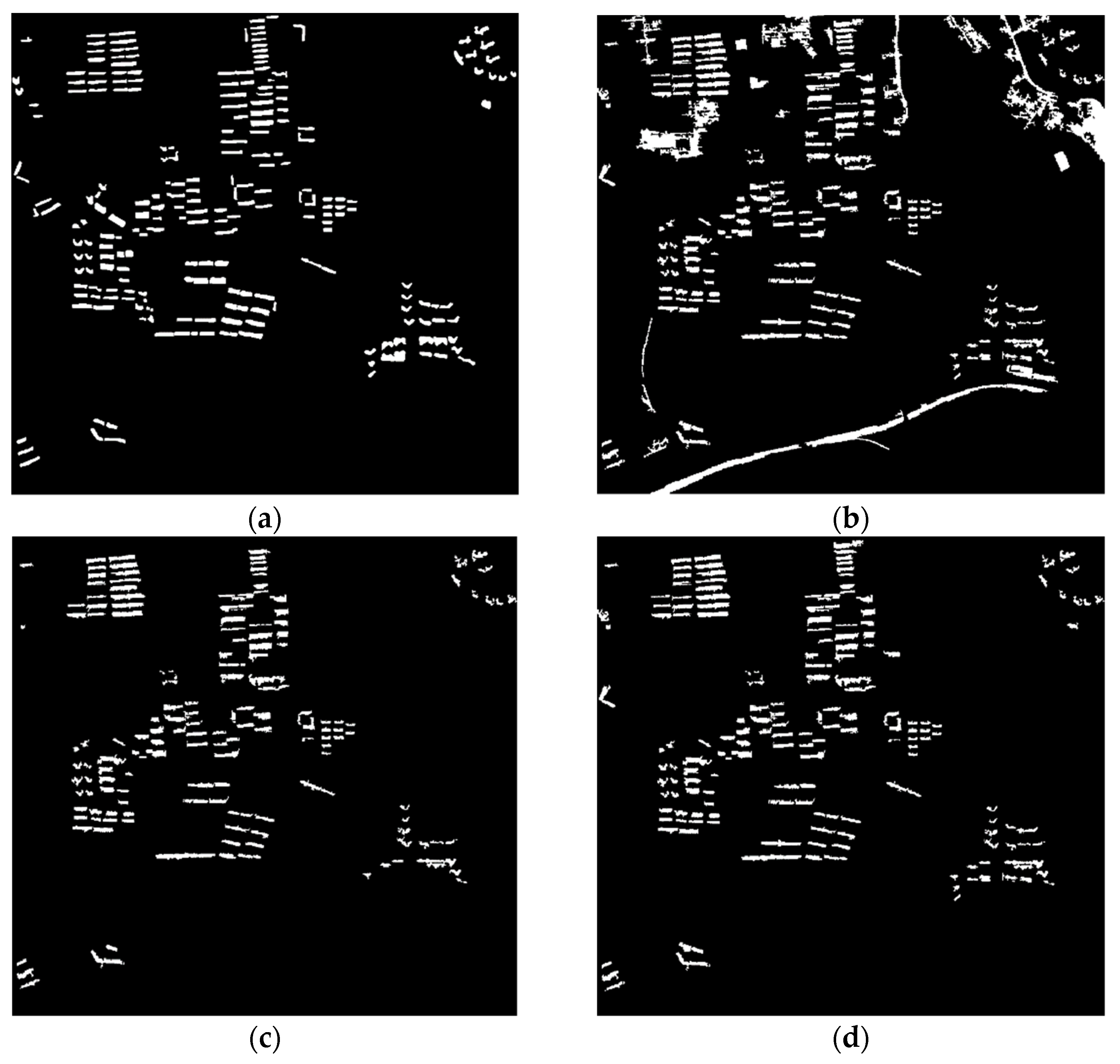
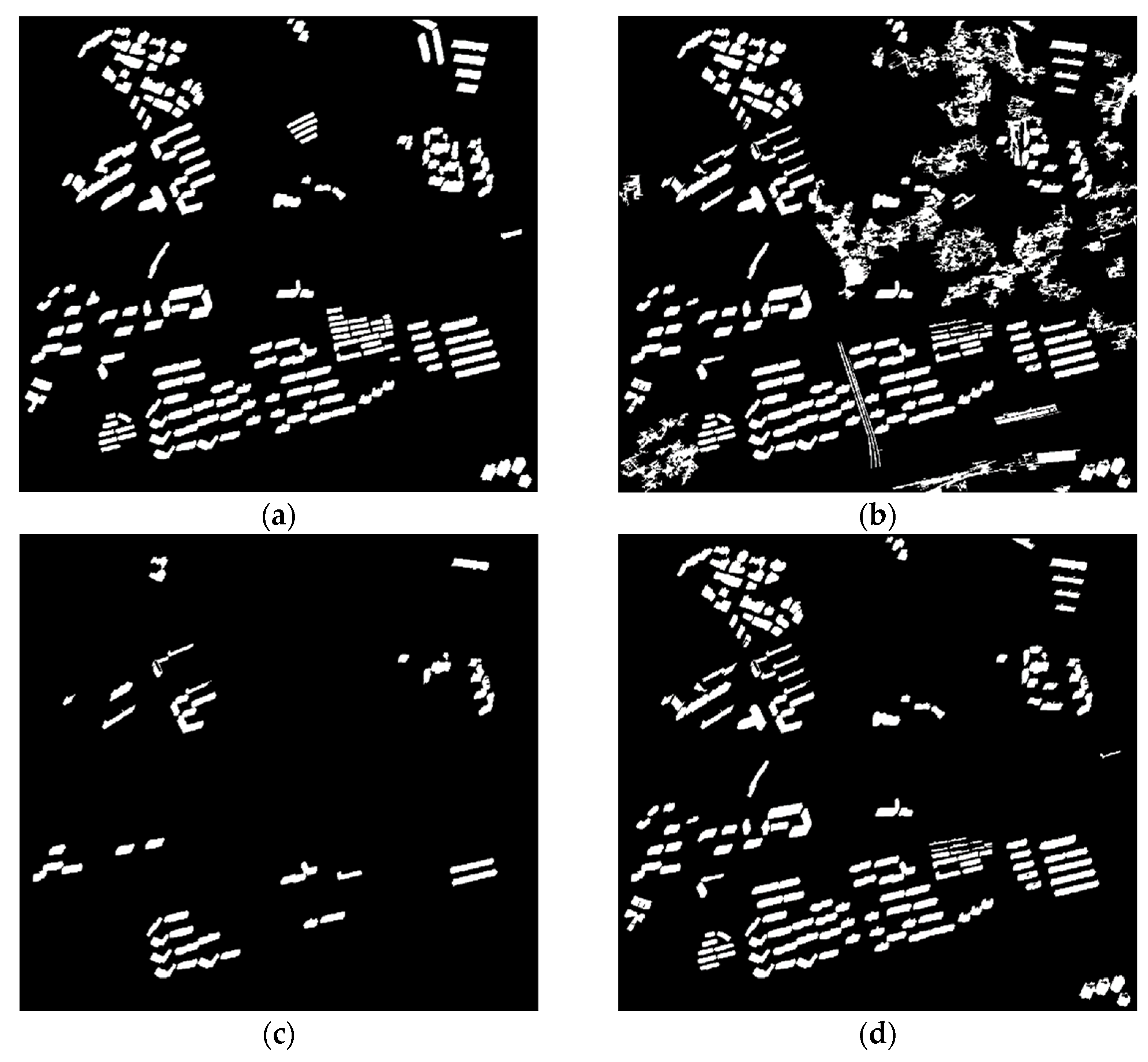
3.2. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- UN Organization. World Urbanization Prospects; United Nations Publications: New York, NY, USA, 2018; Volume 12, ISBN 9789211483192.
- Guo, Z.; Wang, S.D.; Cheng, M.M.; Shu, Y. Assess the effect of different degrees of urbanization on land surface temperature using remote sensing images. Procedia Environ. Sci. 2012, 13, 935–942. [Google Scholar] [CrossRef] [Green Version]
- Sheeba, A.A.; Jayaparvathy, R. Performance modeling of an intelligent emergency evacuation system in buildings on accidental fire occurrence. Saf. Sci. 2019, 112, 196–205. [Google Scholar] [CrossRef]
- Song, C. Spectral mixture analysis for subpixel vegetation fractions in the urban environment: How to incorporate endmember variability? Remote Sens. Environ. 2005, 95, 248–263. [Google Scholar] [CrossRef]
- Yang, L.; Xian, G.; Klaver, J.M.; Deal, B. Urban land-cover change detection through sub-pixel imperviousness mapping using remotely sensed data. Photogramm. Eng. Remote Sens. 2003, 69, 1003–1010. [Google Scholar] [CrossRef]
- Esch, T.; Heldens, W.; Hirner, A.; Keil, M.; Marconcini, M.; Roth, A.; Zeidler, J.; Dech, S.; Strano, E. Breaking new ground in mapping human settlements from space—The Global Urban Footprint. ISPRS J. Photogramm. Remote Sens. 2017, 134, 30–42. [Google Scholar] [CrossRef] [Green Version]
- Taubenböck, H.; Esch, T.; Felbier, A.; Wiesner, M.; Roth, A.; Dech, S. Monitoring urbanization in mega cities from space. Remote Sens. Environ. 2012, 117, 162–176. [Google Scholar] [CrossRef]
- Song, X.P.; Sexton, J.O.; Huang, C.; Channan, S.; Townshend, J.R. Characterizing the magnitude, timing and duration of urban growth from time series of Landsat-based estimates of impervious cover. Remote Sens. Environ. 2016, 175, 1–13. [Google Scholar] [CrossRef]
- Khosravi, I.; Momeni, M.; Rahnemoonfar, M. Performance evaluation of object-based and pixel-based building detection algorithms from very high spatial resolution imagery. Photogramm. Eng. Remote Sens. 2014, 80, 519–528. [Google Scholar] [CrossRef] [Green Version]
- Shackelford, A.K.; Davis, C.H. A combined fuzzy pixel-based and object-based approach for classification of high-resolution multispectral data over urban areas. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2354–2363. [Google Scholar] [CrossRef] [Green Version]
- Hu, L.; Zheng, J.; Gao, F. A building extraction method using shadow in high resolution multispectral images. Int. Geosci. Remote Sens. Symp. 2011, 1862–1865. [Google Scholar] [CrossRef]
- Shi, W.; Mao, Z.; Liu, J. Building Extraction from High-Resolution Remotely Sensed Imagery Based on Multi-subgraph Matching. J. Indian Soc. Remote Sens. 2018, 46, 2003–2013. [Google Scholar] [CrossRef]
- Carlin, L.B.L. A multilevel context-based system for classification of very high spatial resolution images. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2587–2600. [Google Scholar] [CrossRef] [Green Version]
- You, Y.; Wang, S.; Ma, Y.; Chen, G.; Wang, B.; Shen, M.; Liu, W. Building detection from VHR remote sensing imagery based on the morphological building index. Remote Sens. 2018, 10, 1287. [Google Scholar] [CrossRef] [Green Version]
- Baltsavias, E.P. Object extraction and revision by image analysis using existing geodata and knowledge: Current status and steps towards operational systems. ISPRS J. Photogramm. Remote Sens. 2004, 58, 129–151. [Google Scholar] [CrossRef]
- Haala, N.; Kada, M. An update on automatic 3D building reconstruction. ISPRS J. Photogramm. Remote Sens. 2010, 65, 570–580. [Google Scholar] [CrossRef]
- Pesaresi, M.; Benediktsson, J.A. A new approach for the morphological segmentation of high-resolution satellite imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 309–320. [Google Scholar] [CrossRef] [Green Version]
- Benediktsson, J.A.; Pesaresi, M.; Amason, K. Classification and feature extraction for remote sensing images from urban areas based on morphological transformations. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1940–1949. [Google Scholar] [CrossRef] [Green Version]
- Fauvel, M.; Benediktsson, J.A.; Chanussot, J.; Sveinsson, J.R. Spectral and spatial classification of hyperspectral data using SVMs and morphological profiles. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3804–3814. [Google Scholar] [CrossRef] [Green Version]
- Shirowzhan, S.; Trinder, J. Building Classification from Lidar Data for Spatio-temporal Assessment of 3D Urban Developments. Procedia Eng. 2017, 180, 1453–1461. [Google Scholar] [CrossRef]
- Radhika, S.; Tamura, Y.; Matsui, M. Cyclone damage detection on building structures from pre- and post-satellite images using wavelet based pattern recognition. J. Wind Eng. Ind. Aerodyn. 2015, 136, 23–33. [Google Scholar] [CrossRef]
- Xi, Y.; Luo, Q. A morphology-based method for building change detection using multi-temporal airborne LiDAR data. Remote Sens. Lett. 2018, 9, 131–139. [Google Scholar] [CrossRef]
- Du, S.; Zhang, Y.; Zou, Z.; Xu, S.; He, X.; Chen, S. Automatic building extraction from LiDAR data fusion of point and grid-based features. ISPRS J. Photogramm. Remote Sens. 2017, 130, 294–307. [Google Scholar] [CrossRef]
- Yan, Y.; Tan, Z.; Su, N.; Zhao, C. Building extraction based on an optimized stacked sparse autoencoder of structure and training samples using LIDAR DSM and optical images. Sensors 2017, 17, 1957. [Google Scholar] [CrossRef] [Green Version]
- Saha, S.; Bovolo, F.; Bruzzone, L. Building Change Detection in VHR SAR Images via Unsupervised Deep Transcoding. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1917–1929. [Google Scholar] [CrossRef]
- Zhao, L.; Zhou, X.; Kuang, G. Building detection from urban SAR image using building characteristics and contextual information. EURASIP J. Adv. Signal Process. 2013, 2013, 56. [Google Scholar] [CrossRef] [Green Version]
- Widyaningrum, E.; Peters, R.Y.; Lindenbergh, R.C. Building outline extraction from als point clouds using medial axis transform descriptors. Pattern Recognit. 2020, 106, 107447. [Google Scholar] [CrossRef]
- Wang, B.; Choi, S.; Byun, Y.; Lee, S.; Choi, J. Object-based change detection of very high resolution satellite imagery using the cross-sharpening of multitemporal data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1151–1155. [Google Scholar] [CrossRef]
- Voulodimos, A.; Doulamis, N.; Doulamis, A.; Protopapadakis, E. Deep Learning for Computer Vision: A Brief Review. Comput. Intell. Neurosci. 2018, 2018, 7068349. [Google Scholar] [CrossRef]
- Park, H.; Choi, J.; Park, W.; Park, H. Modified S2CVA algorithm using cross-sharpened images for unsupervised change detection. Sustainability 2018, 10, 3301. [Google Scholar] [CrossRef] [Green Version]
- Gharibbafghi, Z.; Tian, J.; Reinartz, P. Modified superpixel segmentation for digital surface model refinement and building extraction from satellite stereo imagery. Remote Sens. 2018, 10, 1824. [Google Scholar] [CrossRef] [Green Version]
- Mao, J.; Gao, N. The airborne transmission of infection between flats in high-rise residential buildings: A review. Build. Environ. 2015, 94, 516–531. [Google Scholar] [CrossRef] [PubMed]
- Lozinsky, C.H.; Touchie, M.F. Inter-zonal airflow in multi-unit residential buildings: A review of the magnitude and interaction of driving forces, measurement techniques and magnitudes, and its impact on building performance. Indoor Air 2020, 30, 1083–1108. [Google Scholar] [CrossRef] [PubMed]
- Avudaiammal, R.; Elaveni, P.; Selvan, S.; Rajangam, V. Extraction of Buildings in Urban Area for Surface Area Assessment from Satellite Imagery based on Morphological Building Index using SVM Classifier. J. Indian Soc. Remote Sens. 2020, 48, 1325–1344. [Google Scholar] [CrossRef]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using SPOT-5 HRG imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Tong, H.; Maxwell, T.; Zhang, Y.; Dey, V. A supervised and fuzzy-based approach to determine optimal multi-resolution image segmentation parameters. Photogramm. Eng. Remote Sens. 2012, 78, 1029–1044. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L.; Zhu, T. Building change detection from multitemporal high-resolution remotely sensed images based on a morphological building index. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 105–115. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L. A multidirectional and multiscale morphological index for automatic building extraction from multispectralgeoeye-1 imagery. Photogramm. Eng. Remote Sens. 2011, 77, 721–732. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L. Morphological building/shadow index for building extraction from high-resolution imagery over urban areas. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 161–172. [Google Scholar] [CrossRef]
- Soille, P.; Talbot, H. Directional morphological filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 1313–1329. [Google Scholar] [CrossRef]
- Jung, S.; Lee, W.H.; Han, Y. Change detection of building objects in high-resolution single-sensor and multi-sensor imagery considering the sun and sensor’s elevation and azimuth angles. Remote Sens. 2021, 13, 3660. [Google Scholar] [CrossRef]
- Benarchid, O.; Raissouni, N.; EL Adib, S.; Abbous, A.; Azyat, A.; Achhab, B.; Lahraoua, M.; Chahboun, A. Building extraction using object-based classification and shadow information in very high resolution multispectral images, a case study: Tetuan, Morocco. Can. J. Image Process. Comput. Vis. 2013, 4, 1–8. [Google Scholar]
- Landis, J.R.; Koch, G.G. The Measurement of Observer Agreement for Categorical Data. Biometrics 1977, 33, 159. [Google Scholar] [CrossRef] [PubMed] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | KOMPSAT-3A | KOMPSAT-3 | WorldView-3 | |
|---|---|---|---|---|
| Acquisition date | 25 September 2018 | 26 February 2019 | 2 November 2016 | |
| Resolution | 2.2 m | 2.8 m | 1.24 m | |
| Spectral bands | Blue: 450–520 nm Green: 520–600 nm Red: 630–690 nm NIR: 760–900 nm | Blue: 450–900 nm Green: 520–600 nm Red: 630–690 nm NIR: 760–900 nm | Blue: 450–510 nm Green: 510–580 nm Red: 630–690 nm NIR: 770–890 nm | |
| Image size | 1090 × 1050 pixels | 1154 × 995 pixels | 1682 × 1547 pixels | |
| Sensor angle | Azimuth | 285.6° | 207.6° | 204.4° |
| Elevation | 89.6° | 62.3° | 63.7° | |
| Sun angle | Azimuth | 208.1° | 198.5° | 170.6° |
| Elevation | 50.0° | 47.5° | 39.7° | |
| Reference Data | |||
|---|---|---|---|
| Condition Positive (CP) | Condition Negative (CN) | ||
| Results | Prediction Positive (PP) | True Positive (TP) | False Positive (FP) |
| Prediction Negative (PN) | False Negative (FN) | True Negative (TN) | |
| Site No. | Scale | Shape | Compactness | Number of Objects |
|---|---|---|---|---|
| Site 1 | 180 | 0.1 | 0.5 | 2468 |
| Site 2 | 180 | 0.1 | 0.5 | 1774 |
| Site 3 | 150 | 0.1 | 0.5 | 2171 |
| Methods | HRB Detection Result by MBI | HRB Detection Results by MBI with Shadow Intensity [42] | HRB Detection Results by MBI with Digital Map |
|---|---|---|---|
| False alarm | 0.0525 | 0.0211 | 0.0102 |
| Miss rate | 0.3445 | 0.3874 | 0.2416 |
| F1-score | 0.4744 | 0.6217 | 0.7741 |
| Kappa | 0.4422 | 0.6180 | 0.7601 |
| Methods | HRB Detection Result by MBI | HRB Detection Results by MBI with Shadow Intensity [42] | HRB Detection Results by MBI with Digital Map |
|---|---|---|---|
| False alarm | 0.0306 | 0.0040 | 0.0028 |
| Miss rate | 0.1344 | 0.2460 | 0.1328 |
| F1-score | 0.7284 | 0.8184 | 0.9138 |
| Kappa | 0.7094 | 0.8092 | 0.9084 |
| Methods | HRB Detection Result by MBI | HRB Detection Results by MBI with Shadow Intensity [42] | HRB Detection Results by MBI with Digital Map |
|---|---|---|---|
| False alarm | 0.0815 | 0.1028 | 0.0020 |
| Miss rate | 0.1328 | 0.7471 | 0.1283 |
| F1-score | 0.6786 | 0.4037 | 0.9314 |
| Kappa | 0.6310 | 0.3771 | 0.9239 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, S.; Lee, K.; Lee, W.H. Object-Based High-Rise Building Detection Using Morphological Building Index and Digital Map. Remote Sens. 2022, 14, 330. https://doi.org/10.3390/rs14020330
Jung S, Lee K, Lee WH. Object-Based High-Rise Building Detection Using Morphological Building Index and Digital Map. Remote Sensing. 2022; 14(2):330. https://doi.org/10.3390/rs14020330
Chicago/Turabian StyleJung, Sejung, Kirim Lee, and Won Hee Lee. 2022. "Object-Based High-Rise Building Detection Using Morphological Building Index and Digital Map" Remote Sensing 14, no. 2: 330. https://doi.org/10.3390/rs14020330