
Estimation of Individual Tree Biomass in Natural Secondary Forests Based on ALS Data and WorldView-3 Imagery


Abstract
:1. Introduction
2. Materials and Methods
2.1. Overview of the Proposed Methodology
2.2. Study Area
2.3. Data and Preprocessing
2.3.1. Field Inventory Data
2.3.2. ALS Data and Preprocessing
2.3.3. WorldView-3 Imagery and Preprocessing
2.4. Individual Tree Crown Delineation
2.5. Tree Species Classification
2.5.1. Classification System and Sample Selections
2.5.2. Feature Extraction and Selection
2.5.3. Classification Algorithms
- SVM: SVM is a generalized linear classifier that performs binary classification of data in a supervised learning manner, where the decision boundary is the hyperplane of maximum margins solved for the learned samples [58]. SVM can perform nonlinear classification by a kernel method; the parameters of this study were set as kernel = ‘linear’.
- KNN: The KNN method is a multivariate nonparametric algorithm that uses a set of predictor feature variables (X) to match each target pixel to a number (k) of the most similar nearest neighbor reference pixels for which values of response variables (Y) are known [59]. This study set the number of nearest neighbors to 5 with uniform weight.
- CNN: CNN, first developed in 1995 for the classification of handwritten images [60], is a representative deep learning algorithm. CNN interprets spatial data by scanning with a series of trainable moving windows and has the capability of representation learning in a translation-invariant manner according to its hierarchical structure. In this study, the CNN had a simple structure with an input layer, two hidden layers, and an output layer, and was implemented using an epoch of 1000 and a batch size of 60.
- Boosting: The idea of the boosting algorithm is that for a complex task, the result of multiple learners’ judgment will be better than that of a single learner. Representative boosting algorithms include adaptive boosting, the gradient boosting decision tree (GBDT), and XGBoost. XGBoost, which is an improvement of the GBDT algorithm [61], was used in this study. The main characteristics of this algorithm are (1) prevention of overfitting by regularization terms, a (2) loss function with first-order derivative and second-order derivatives, and (3) faster-running speed. The classification function was set to “multi: softmax”, the depth of the tree was set to 5, and the learning rate was 0.5.
- Bagging: The RF classifier is a bagging approach that combines multiple decision trees [62]. RF has excellent reported classification performance, requires little human intervention, has fast computational speed, is not predisposed to overfitting, and is robust in dealing with noisy data. The parameters of this study were set as follows: the number of trees was 1000 and the random state was set to 10.
- Stacked generalization (SG): Stacking or SG differs from bagging and boosting in two ways. First, stacking usually considers heterogeneous learners (combining different learning algorithms), while bagging and boosting mainly consider homogeneous learners. Second, stacking combines base models with meta models, while bagging and boosting combine weak learners based on deterministic algorithms. Stacking is an ensemble framework for two-layer models. The first layer (base model) consists of several base models, using the original data as model input data to obtain the prediction structure; the second layer (meta model) uses the prediction results of the first layer model as input data for retraining, which constitutes the complete stacking model [50]. We adopted SVM, KNN, and CNN as the base models, and then retrained the models using their predicted values as the input values of the meta model.
2.5.4. Accuracy Assessment
2.6. Estimation of Individual Tree AGB
2.6.1. Individual-Tree DBH Inversion
2.6.2. AGB Estimation for Individual Trees
3. Results
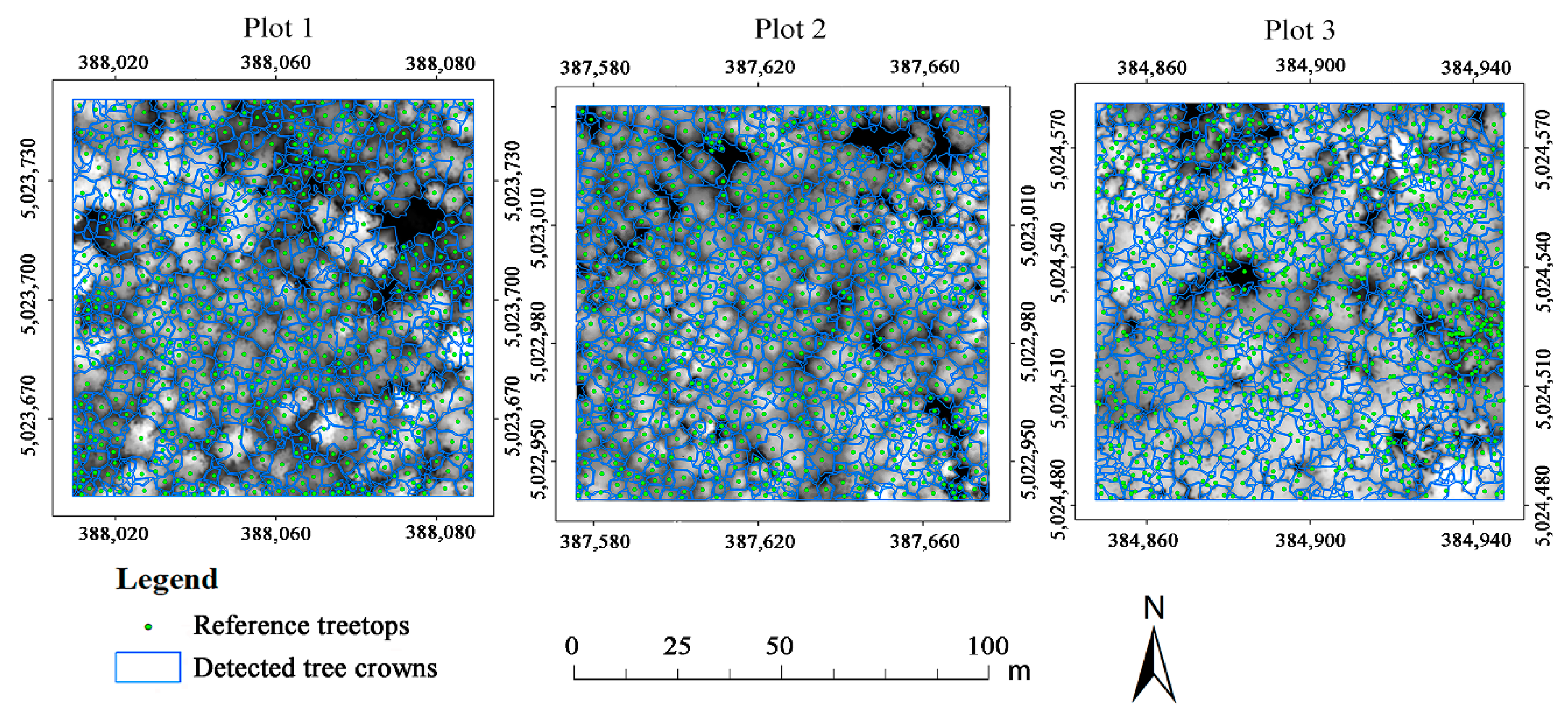
3.1. Individual Tree Crown Delineation
3.2. Feature Selection and Accuracy Assessment of Tree Species Classification
3.2.1. Feature Selection
3.2.2. The Performance of Machine Learning Algorithms in Tree Species Classification
3.2.3. The Performance of Ensemble Learning Algorithms in Tree Species Classification
3.3. The Estimation and Assessment of Individual Tree AGB
3.3.1. Individual Tree DBH Inversion
3.3.2. Estimation of Individual Tree AGB
4. Discussion
4.1. Individual Tree Crown Delineation Algorithm
4.2. Tree Species Classification
4.3. Comparison with Other Similar Products
4.4. Limitations and Future Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kajimoto, T.; Matsuura, Y.; Sofronov, M.A.; Volokitina, A.V.; Mori, S.; Osawa, A.; Abaimov, A.P. Above- and belowground biomass and primary productivity of a Larix gmelinii stand near Tura, central Siberia. Tree Physiol. 1999, 19, 815–822. [Google Scholar] [CrossRef]
- Kindermann, G.E.; Mccallum, I.; Fritz, S.; Obersteiner, M. A Global Forest Growing Stock, Biomass and Carbon Map Based on FAO Statistics. Silva Fenn. 2008, 42, 387–396. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Song, T.; Wang, K.; Du, H.; Yue, Y.; Wang, G.; Zeng, F. Biomass and carbon storage in an age-sequence of Cyclobalanopsis glauca plantations in southwest China. Ecol. Eng. 2014, 73, 184–191. [Google Scholar] [CrossRef]
- Brovkina, O.; Novotny, J.; Cienciala, E.; Zemek, F.; Russ, R. Mapping forest aboveground biomass using airborne hyperspectral and LiDAR data in the mountainous conditions of Central Europe. Ecol. Eng. 2017, 100, 219–230. [Google Scholar] [CrossRef]
- Zhu, J.; Mao, Z.; Hu, L.; Zhang, J. Plant diversity of secondary forests in response to anthropogenic disturbance levels in montane regions of northeastern China. J. For. Res.-Jpn. 2017, 12, 403–416. [Google Scholar] [CrossRef]
- Li, M.; Mao, X.; Fan, W.; University, N.F. Forest Biomass Estimation Using Remote Sensing Based on Canopy Density Simultaneous Equations Model. Sci. Silvae Sin. 2014, 50, 85–91. [Google Scholar]
- White, J.D.; Coops, N.C.; Scott, N.A. Estimates of New Zealand forest and scrub biomass from the 3-PG model. Ecol. Model. 2000, 131, 175–190. [Google Scholar] [CrossRef]
- Chave, J.; Rejou-Mechain, M.; Burquez, A.; Chidumayo, E.; Colgan, M.S.; Delitti, W.B.C.; Duque, A.; Eid, T.; Fearnside, P.M.; Goodman, R.C.; et al. Improved allometric models to estimate the aboveground biomass of tropical trees. Glob. Chang. Biol. 2014, 20, 3177–3190. [Google Scholar] [CrossRef]
- Chen, Q.; McRoberts, R.E.; Wang, C.; Radtke, P.J. Forest aboveground biomass mapping and estimation across multiple spatial scales using model-based inference. Remote Sens. Environ. 2016, 184, 350–360. [Google Scholar] [CrossRef]
- Baccini, A.; Goetz, S.J.; Walker, W.S.; Laporte, N.T.; Sun, M.; Sulla-Menashe, D.; Hackler, J.; Beck, P.S.A.; Dubayah, R.; Friedl, M.A.; et al. Estimated carbon dioxide emissions from tropical deforestation improved by carbon-density maps. Nat. Clim. Chang. 2012, 2, 182–185. [Google Scholar] [CrossRef]
- Lu, D. The potential and challenge of remote sensing-based biomass estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- Aijazi, A.; Checchin, P.; Malaterre, L.; Trassoudaine, L. Automatic Detection and Parameter Estimation of Trees for Forest Inventory Applications Using 3D Terrestrial LiDAR. Remote Sens. 2017, 9, 946. [Google Scholar] [CrossRef] [Green Version]
- Zald, H.S.J.; Wulder, M.A.; White, J.C.; Hilker, T.; Hermosilla, T.; Hobart, G.W.; Coops, N.C. Integrating Landsat pixel composites and change metrics with lidar plots to predictively map forest structure and aboveground biomass in Saskatchewan, Canada. Remote Sens. Environ. 2016, 176, 188–201. [Google Scholar] [CrossRef] [Green Version]
- Herold, M.; Johns, T. Linking requirements with capabilities for deforestation monitoring in the context of the UNFCCC-REDD process. Environ. Res. Lett. 2007, 2, 045025. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Stinson, G.; Hilker, T.; Kurz, W.A.; Coops, N.C.; St-Onge, B.; Trofymow, J.A.T. Implications of differing input data sources and approaches upon forest carbon stock estimation. Environ. Monit. Assess. 2010, 166, 543–561. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.; Ranson, K.J.; Guo, Z.; Zhang, Z.; Montesano, P.; Kimes, D. Forest biomass mapping from lidar and radar synergies. Remote Sens. Environ. 2011, 115, 2906–2916. [Google Scholar] [CrossRef] [Green Version]
- Gleason, C.J.; Im, J. A Review of Remote Sensing of Forest Biomass and Biofuel: Options for Small-Area Applications. Gisci. Remote Sens. 2011, 48, 141–170. [Google Scholar] [CrossRef]
- Jacon, A.D.; Galvão, L.S.; Dalagnol, R.; Dos Santos, J.R. Aboveground biomass estimates over Brazilian savannas using hyperspectral metrics and machine learning models: Experiences with Hyperion/EO-1. Gisci. Remote Sens. 2021, 58, 1112–1129. [Google Scholar] [CrossRef]
- Domingo, D.; Montealegre, A.L.; Lamelas, M.T.; García-Martín, A.; de la Riva, J.; Rodríguez, F.; Alonso, R. Quantifying forest residual biomass in Pinus halepensis Miller stands using Airborne Laser Scanning data. Gisci. Remote Sens. 2019, 56, 1210–1232. [Google Scholar] [CrossRef]
- Tanase, M.A.; Panciera, R.; Lowell, K.; Tian, S.; Hacker, J.M.; Walker, J.P. Airborne multi-temporal L-band polarimetric SAR data for biomass estimation in semi-arid forests. Remote Sens. Environ. 2014, 145, 93–104. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T.; Bollandsås, O.M.; Gregoire, T.G.; Nelson, R.; Ståhl, G. Comparison of precision of biomass estimates in regional field sample surveys and airborne LiDAR-assisted surveys in Hedmark County, Norway. Remote Sens. Environ. 2013, 130, 108–120. [Google Scholar] [CrossRef] [Green Version]
- Morel, A.C.; Fisher, J.B.; Malhi, Y. Evaluating the potential to monitor aboveground biomass in forest and oil palm in Sabah, Malaysia, for 2000–2008 with Landsat ETM+ and ALOS-PALSAR. Int. J. Remote Sens. 2012, 33, 3614–3639. [Google Scholar] [CrossRef]
- Saatchi, S.; Marlier, M.; Chazdon, R.L.; Clark, D.B.; Russell, A.E. Impact of spatial variability of tropical forest structure on radar estimation of aboveground biomass. Remote Sens. Environ. 2011, 115, 2836–2849. [Google Scholar] [CrossRef]
- Waring, R.H.; Jobea, W.; Raymond, H.E.; Leslie, M.; Jon, R.K.; Weishampel, J.F.; Ram, O.; Franklin, S.E. Imaging Radar for Ecosystem Studies. Bioscience 1995, 45, 715–723. [Google Scholar] [CrossRef]
- Le Toan, T.; Quegan, S.; Woodward, I.; Lomas, M.; Delbart, N.; Picard, G. Relating Radar Remote Sensing of Biomass to Modelling of Forest Carbon Budgets. Clim. Chang. 2004, 67, 379–402. [Google Scholar] [CrossRef]
- Zhao, P.; Lu, D.; Wang, G.; Wu, C.; Huang, Y.; Yu, S. Examining Spectral Reflectance Saturation in Landsat Imagery and Corresponding Solutions to Improve Forest Aboveground Biomass Estimation. Remote Sens. 2016, 8, 469. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.; West, G. Reflecting conifer phenology using mobile terrestrial LiDAR: A case study of Pinus sylvestris growing under the Mediterranean climate in Perth, Australia. Ecol. Indic. 2016, 70, 1–9. [Google Scholar] [CrossRef]
- Means, J.E.; Acker, S.A.; Harding, D.J.; Blair, J.B.; Lefsky, M.A.; Cohen, W.B.; Harmon, M.E.; McKee, W.A. Use of Large-Footprint Scanning Airborne Lidar to Estimate Forest Stand Characteristics in the Western Cascades of Oregon. Remote Sens. Environ. 1999, 67, 298–308. [Google Scholar] [CrossRef]
- Clark, M.L.; Roberts, D.A.; Ewel, J.J.; Clark, D.B. Estimation of tropical rain forest aboveground biomass with small-footprint lidar and hyperspectral sensors. Remote Sens. Environ. 2011, 115, 2931–2942. [Google Scholar] [CrossRef]
- He, Q.; Chen, E.; An, R.; Li, Y. Above-Ground Biomass and Biomass Components Estimation Using LiDAR Data in a Coniferous Forest. Forests 2013, 4, 984–1002. [Google Scholar] [CrossRef] [Green Version]
- Lu, D.; Chen, Q.; Wang, G.; Moran, E.; Batistella, M.; Zhang, M.; Vaglio Laurin, G.; Saah, D. Aboveground Forest Biomass Estimation with Landsat and LiDAR Data and Uncertainty Analysis of the Estimates. Int. J. For. Res. 2012, 2012, 436537. [Google Scholar] [CrossRef]
- Luo, S.; Wang, C.; Xi, X.; Pan, F.; Peng, D.; Zou, J.; Nie, S.; Qin, H. Fusion of airborne LiDAR data and hyperspectral imagery for aboveground and belowground forest biomass estimation. Ecol. Indic. 2017, 73, 378–387. [Google Scholar] [CrossRef]
- Qiu; Wang; Zou; Yang; Xie; Xu; Zhong Finer Resolution Estimation and Mapping of Mangrove Biomass Using UAV LiDAR and WorldView-2 Data. Forests 2019, 10, 871. [CrossRef] [Green Version]
- Zhao, K.; Popescu, S.; Nelson, R. Lidar remote sensing of forest biomass: A scale-invariant estimation approach using airborne lasers. Remote Sens. Environ. 2009, 113, 182–196. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.; Zhang, L. Trends in Automatic Individual Tree Crown Detection and Delineation—Evolution of LiDAR Data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Niu, D.; Zhao, Y.; Wang, S.; Qian, C.; Huang, H.; Xie, H.; Gao, Y. Interface Energy-Level Alignment between Black Phosphorus and F16CuPc Molecular Films. J. Phys. Chem. C 2019, 123, 10443–10450. [Google Scholar] [CrossRef]
- Chen, Q.; Vaglio Laurin, G.; Battles, J.J.; Saah, D. Integration of airborne lidar and vegetation types derived from aerial photography for mapping aboveground live biomass. Remote Sens. Environ. 2012, 121, 108–117. [Google Scholar] [CrossRef]
- Shi, Y.; Skidmore, A.K.; Wang, T.; Holzwarth, S.; Heiden, U.; Pinnel, N.; Zhu, X.; Heurich, M. Tree species classification using plant functional traits from LiDAR and hyperspectral data. Int. J. Appl. Earth Obs. 2018, 73, 207–219. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, K.; Liu, L.; Wang, S.; Liu, H. Retrieval of Mangrove Aboveground Biomass at the Individual Species Level with WorldView-2 Images. Remote Sens. 2015, 7, 12192–12214. [Google Scholar] [CrossRef] [Green Version]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Hartling, S.; Sagan, V.; Maimaitijiang, M. Urban tree species classification using UAV-based multi-sensor data fusion and machine learning. Gisci. Remote Sens. 2021, 1250–1275. [Google Scholar] [CrossRef]
- Wessel, M.; Brandmeier, M.; Tiede, D. Evaluation of Different Machine Learning Algorithms for Scalable Classification of Tree Types and Tree Species Based on Sentinel-2 Data. Remote Sens. 2018, 10, 1419. [Google Scholar] [CrossRef] [Green Version]
- Sothe, C.; De Almeida, C.M.; Schimalski, M.B.; La Rosa, L.E.C.; Castro, J.D.B.; Feitosa, R.Q.; Dalponte, M.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; et al. Comparative performance of convolutional neural network, weighted and conventional support vector machine and random forest for classifying tree species using hyperspectral and photogrammetric data. Gisci Remote Sens. 2020, 57, 369–394. [Google Scholar] [CrossRef]
- Grabska, E.; Frantz, D.; Ostapowicz, K. Evaluation of machine learning algorithms for forest stand species mapping using Sentinel-2 imagery and environmental data in the Polish Carpathians. Remote Sens. Environ. 2020, 251, 112103. [Google Scholar] [CrossRef]
- Ben-Arie, J.R.; Hay, G.J.; Powers, R.P.; Castilla, G.; St-Onge, B. Development of a pit filling algorithm for LiDAR canopy height models. Comput. Geosci. 2009, 35, 1940–1949. [Google Scholar] [CrossRef]
- Zhao, Y.; Hao, Y.; Zhen, Z.; Quan, Y. A Region-Based Hierarchical Cross-Section Analysis for Individual Tree Crown Delineation Using ALS Data. Remote Sen. 2017, 9, 1084. [Google Scholar] [CrossRef] [Green Version]
- Vincent, L. Morphological grayscale reconstruction in image analysis: Applications and efficient algorithms. IEEE Trans. Image Processing A Publ. 1993, 2, 176–201. [Google Scholar] [CrossRef] [Green Version]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef] [Green Version]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, 3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Du, C.; Fan, W.; Ma, Y.; Jin, H.; Zhen, Z. The Effect of Synergistic Approaches of Features and Ensemble Learning Algorithms on Aboveground Biomass Estimation of Natural Secondary Forests Based on ALS and Landsat 8. Sensors 2021, 21, 5974. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Tree species classification in the Southern Alps based on the fusion of very high geometrical resolution multispectral/hyperspectral images and LiDAR data. Remote Sens. Environ. 2012, 123, 258–270. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J. A comprehensive but efficient framework of proposing and validating feature parameters from airborne LiDAR data for tree species classification. Int. J. Appl. Earth Obs. Geoinf. 2016, 46, 45–55. [Google Scholar] [CrossRef]
- Qin, M.; Su, Y.; Guo, Q. Comparison of Canopy Cover Estimations From Airborne LiDAR, Aerial Imagery, and Satellite Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4225–4236. [Google Scholar]
- Richardson, J.J.; Moskal, L.M.; Kim, S.H. Modeling approaches to estimate effective leaf area index from aerial discrete-return LIDAR. Agric. For. Meteorol. 2009, 149, 1152–1160. [Google Scholar] [CrossRef]
- Dalponte, M.; Orka, H.O.; Gobakken, T.; Gianelle, D.; Naesset, E. Tree Species Classification in Boreal Forests with Hyperspectral Data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2632–2645. [Google Scholar] [CrossRef]
- Hughes, G.F. On the Mean Accuracy of Statistical Pattern Recognizers. IEEE Trans. Inf. Theory 1968, 14, 55–63. [Google Scholar] [CrossRef] [Green Version]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar] [CrossRef] [Green Version]
- Zheng, G.; Peng, S.; Rong, H.; Yang, L.I.; Wang, N. A General Introduction to Estimation and Retrieval of Forest Volume with Remote Sensing Based on KNN. Remote Sens. Technol. Appl. 2010, 25, 430–437. [Google Scholar]
- LeCun, Y.; Bengio, Y. Convolutional Networks for Images, Speech, and Time-Serie. In Arbib MA. Brain Theory Neural Networks; MIT Press: Cambridge, MA, USA, 1995. [Google Scholar]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In KDD’16: Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; Association for Computing Machinery: New York, NY, USA, 2016; pp. 785–794. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–23. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.; Zhang, L.; Li, F. Developing additive systems of biomass equations for nine hardwood species in Northeast China. Trees 2015, 29, 1149–1163. [Google Scholar] [CrossRef]
- Dong, L.H.; Feng-Ri, L.I.; Song, Y.W.; Forestry, S.O.; University, N.F.; Bureau, S.F. Error structure and additivity of individual tree biomass model for four natural conifer species in Northeast China. Chin. J. Appl. Ecol. 2015, 26, 704–714. [Google Scholar]
- Adelabu, D. Employing ground and satellite-based QuickBird data and random forest to discriminate five tree species in a Southern African Woodland. Geocarto Int. 2015, 30, 457–471. [Google Scholar] [CrossRef]
- Hovi; Korhonen; Vauhkonen; Korpela LiDAR waveform features for tree species classification and their sensitivity to tree- and acquisition related parameters. Remote Sens. Environ. 2016, 173, 224–237. [CrossRef]
- Xin, S.; Cao, L. Tree-Species Classification in Subtropical Forests Using Airborne Hyperspectral and LiDAR Data. Remote Sens. 2017, 9, 1180. [Google Scholar]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. Isprs. J. Photogramm. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Pearse, G.D.; Watt, M.S.; Soewarto, J.; Tan, A.Y.S. Deep Learning and Phenology Enhance Large-Scale Tree Species Classification in Aerial Imagery during a Biosecurity Response. Remote Sens. 2021, 13, 1789. [Google Scholar] [CrossRef]
- Ghatkar, J.G.; Singh, R.K.; Shanmugam, P. Classification of algal bloom species from remote sensing data using an extreme gradient boosted decision tree model. Int. J. Remote Sens. 2019, 40, 9412–9438. [Google Scholar] [CrossRef]
- Kwak, D.; Lee, W.; Cho, H.; Lee, S.; Son, Y.; Kafatos, M.; Kim, S. Estimating stem volume and biomass of Pinus koraiensis using LiDAR data. J. Plant. Res. 2010, 123, 421–432. [Google Scholar] [CrossRef]
- Liu, F.; Tan, C.; Zhang, G.; Liu, J. Estimation of forest parameter and biomass for individual pine trees using airborne LiDAR. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2013, 44, 219–224, 242. [Google Scholar]
- Su, Y.; Guo, Q.; Xue, B.; Hu, T.; Alvarez, O.; Tao, S.; Fang, J. Spatial distribution of forest aboveground biomass in China: Estimation through combination of spaceborne lidar, optical imagery, and forest inventory data. Remote Sens. Environ. 2016, 173, 187–199. [Google Scholar] [CrossRef] [Green Version]
- Ke, Y.; Quackenbush, L.J. A review of methods for automatic individual tree-crown detection and delineation from passive remote sensing. Int. J. Remote Sens. 2011, 32, 4725–4747. [Google Scholar] [CrossRef]
- Fang, F.; Im, J.; Lee, J.; Kim, K. An improved tree crown delineation method based on live crown ratios from airborne LiDAR data. Gisci. Remote Sens. 2016, 53, 402–419. [Google Scholar] [CrossRef]
- Duncanson, L.; Huang, W.; Johnson, K.; Swatantran, A.; Mcroberts, R.E.; Dubayah, R. Implications of allometric model selection for county-level biomass mapping. Carbon Balance Manag. 2017, 12, 18. [Google Scholar] [CrossRef] [PubMed]
- Ke, Y.; Quackenbush, L.J.; Im, J. Synergistic use of QuickBird multispectral imagery and LIDAR data for object-based forest species classification. Remote Sens. Environ. 2010, 114, 1141–1154. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tree Species | N | Height (m) | DBH (cm) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | Max | Min | Std | Median | Mean | Max | Min | Std | Median | ||
| WB | 444 | 15.7 | 36.1 | 5.0 | 3.3 | 15.5 | 15.2 | 26.8 | 5.6 | 5.6 | 14.8 |
| CL | 374 | 15.1 | 22.9 | 6.1 | 3.5 | 15.6 | 15.3 | 29.6 | 5.0 | 5.2 | 14.6 |
| KP | 1189 | 10.5 | 29.3 | 4.1 | 3.2 | 10.3 | 12.9 | 26.4 | 5.1 | 5.5 | 11.9 |
| WA | 407 | 13.8 | 37.0 | 5.4 | 5.3 | 13.1 | 16.2 | 34.1 | 5.1 | 8.4 | 14.4 |
| AS | 285 | 17.7 | 38.7 | 5.6 | 5.4 | 18.8 | 20.1 | 42.5 | 5.4 | 8.2 | 21.3 |
| EL | 838 | 11.1 | 29.0 | 4.3 | 4.2 | 10.1 | 12.7 | 39.1 | 5.0 | 6.8 | 10.6 |
| Others 1 | 521 | 8.2 | 28.9 | 3.0 | 2.9 | 12.7 | 9.4 | 42.2 | 5.0 | 3.2 | 13.1 |
| Total | 4058 | - | - | - | - | - | - | - | - | - | - |
| Number | Model | Expression |
|---|---|---|
| 1 | Linear | H = a + bD |
| 2 | Parabolic | H = a + bD + cD2 |
| 3 | Power function | H = aDb |
| 4 | Schumacher | H = 1.3 + aDb |
| 5 | Schumacher | H = 1.3 + ae−b/D |
| 6 | Logistic | H = 1.3 + a/(1 + be−cD) |
| 7 | Logarithmic | H = a + b × lgD |
| 8 | hyperbola | H = D2/(a + bD)2 |
| 9 | Richard |
| Tree Species | Component | a | b | Tree Species | Component | a | b |
|---|---|---|---|---|---|---|---|
| Korean pine | Branch | −3.3911 | 2.0066 | Changbai larch | branch | −4.9082 | 2.5139 |
| foliage | −2.6995 | 1.5583 | foliage | −4.2379 | 1.8784 | ||
| stem | −2.2319 | 2.2358 | stem | −2.5856 | 2.4856 | ||
| white birch | branch | −5.7625 | 3.0656 | elm | branch | −3.0159 | 2.0328 |
| foliage | −5.9711 | 2.5871 | foliage | −3.4241 | 1.7038 | ||
| stem | −2.8496 | 2.5406 | stem | −2.2812 | 2.3766 | ||
| Manchurian ash | branch | −5.5012 | 2.9299 | Manchurian walnut | branch | −4.0735 | 2.4477 |
| foliage | −5.2438 | 2.345 | foliage | −5.0456 | 2.2577 | ||
| stem | −3.4542 | 2.7104 | stem | −2.6707 | 2.4413 |
| Tree Count | RCP 1 | DCP 2 | Accuracy | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Plot | Reference | Detected | 1:1 | Near | 1:1 | Near | PA | UA | OA |
| 1 | 917 | 929 | 555 | 96 | 580 | 65 | 71.2% | 69.7% | 70.5% |
| 2 | 831 | 814 | 581 | 42 | 611 | 49 | 75.8% | 81.5% | 78.6% |
| 3 | 940 | 905 | 522 | 77 | 556 | 85 | 64.4% | 71.6% | 67.8% |
| Total | 2688 | 2648 | 1658 | 215 | 1747 | 199 | |||
| Features | Algorithms | OA (%) |
|---|---|---|
| SVM | 20.1 | |
| WorldView-3 | KNN | 30.2 |
| CNN | 41.5 | |
| SVM | 14.3 | |
| ALS | KNN | 15.4 |
| CNN | 50.0 | |
| SVM | 24.3 | |
| WorldView-3 + ALS | KNN | 50.5 |
| CNN | 72.8 |
| Features | Algorithms | OA (%) |
|---|---|---|
| RF | 61.7 | |
| XGBoost | 55.2 | |
| WorldView-3 | SG (SVM) | 26.5 |
| SG (KNN) | 42.7 | |
| SG (CNN) | 42.4 | |
| RF | 51.5 | |
| XGBoost | 57.9 | |
| ALS | SG (SVM) | 27.6 |
| SG (KNN) | 47.1 | |
| SG (CNN) | 59.7 | |
| RF | 61.0 | |
| XGBoost | 69.5 | |
| WorldView-3 + ALS | SG (SVM) | 31.8 |
| SG (KNN) | 59.3 | |
| SG (CNN) | 75.0 |
| Tree Species | KP | CL | EL | AS | WB | WA | Others 1 | UA(%) |
|---|---|---|---|---|---|---|---|---|
| KP | 96 | 3 | 9 | 3 | 6 | 3 | 5 | 76.8 |
| CL | 4 | 74 | 8 | 3 | 5 | 4 | 3 | 74.3 |
| EL | 5 | 2 | 85 | 4 | 3 | 0 | 2 | 84.2 |
| AS | 6 | 5 | 9 | 63 | 4 | 3 | 4 | 67.0 |
| WB | 8 | 4 | 7 | 3 | 78 | 1 | 2 | 75.7 |
| WA | 6 | 2 | 4 | 3 | 7 | 55 | 3 | 68.8 |
| Others 1 | 7 | 2 | 5 | 1 | 4 | 1 | 68 | 77.3 |
| PA(%) | 72.7 | 80.4 | 66.9 | 78.8 | 72.9 | 82.1 | 78.2 | |
| OA: 75.0% | ||||||||
| Tree Species | Optimal Model | R2 | RMSE (m) |
|---|---|---|---|
| WB | H = 0.483D1.253 | 0.674 | 2.22 |
| WA | H = 0.588D1.242 | 0.739 | 1.28 |
| EL | H = 0.959D1.055 | 0.643 | 2.29 |
| AS | H = 0.627D1.193 | 0.730 | 1.26 |
| CL | H = 1.3 + 48.640/(1 + 17.348e−0.124D) | 0.654 | 1.84 |
| KP | H = 0.805D1.166 | 0.729 | 1.22 |
| Others 1 | H = 0.872D1.083 | 0.698 | 1.95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Ma, Y.; Quackenbush, L.J.; Zhen, Z. Estimation of Individual Tree Biomass in Natural Secondary Forests Based on ALS Data and WorldView-3 Imagery. Remote Sens. 2022, 14, 271. https://doi.org/10.3390/rs14020271
Zhao Y, Ma Y, Quackenbush LJ, Zhen Z. Estimation of Individual Tree Biomass in Natural Secondary Forests Based on ALS Data and WorldView-3 Imagery. Remote Sensing. 2022; 14(2):271. https://doi.org/10.3390/rs14020271
Chicago/Turabian StyleZhao, Yinghui, Ye Ma, Lindi J. Quackenbush, and Zhen Zhen. 2022. "Estimation of Individual Tree Biomass in Natural Secondary Forests Based on ALS Data and WorldView-3 Imagery" Remote Sensing 14, no. 2: 271. https://doi.org/10.3390/rs14020271