
Separation of the Temperature Effect on Structure Responses via LSTM—Particle Filter Method Considering Outlier from Remote Cloud Platforms

Abstract
:1. Introduction
2. Fundamental Principles of PF and LSTM Approach
2.1. Particle Filter
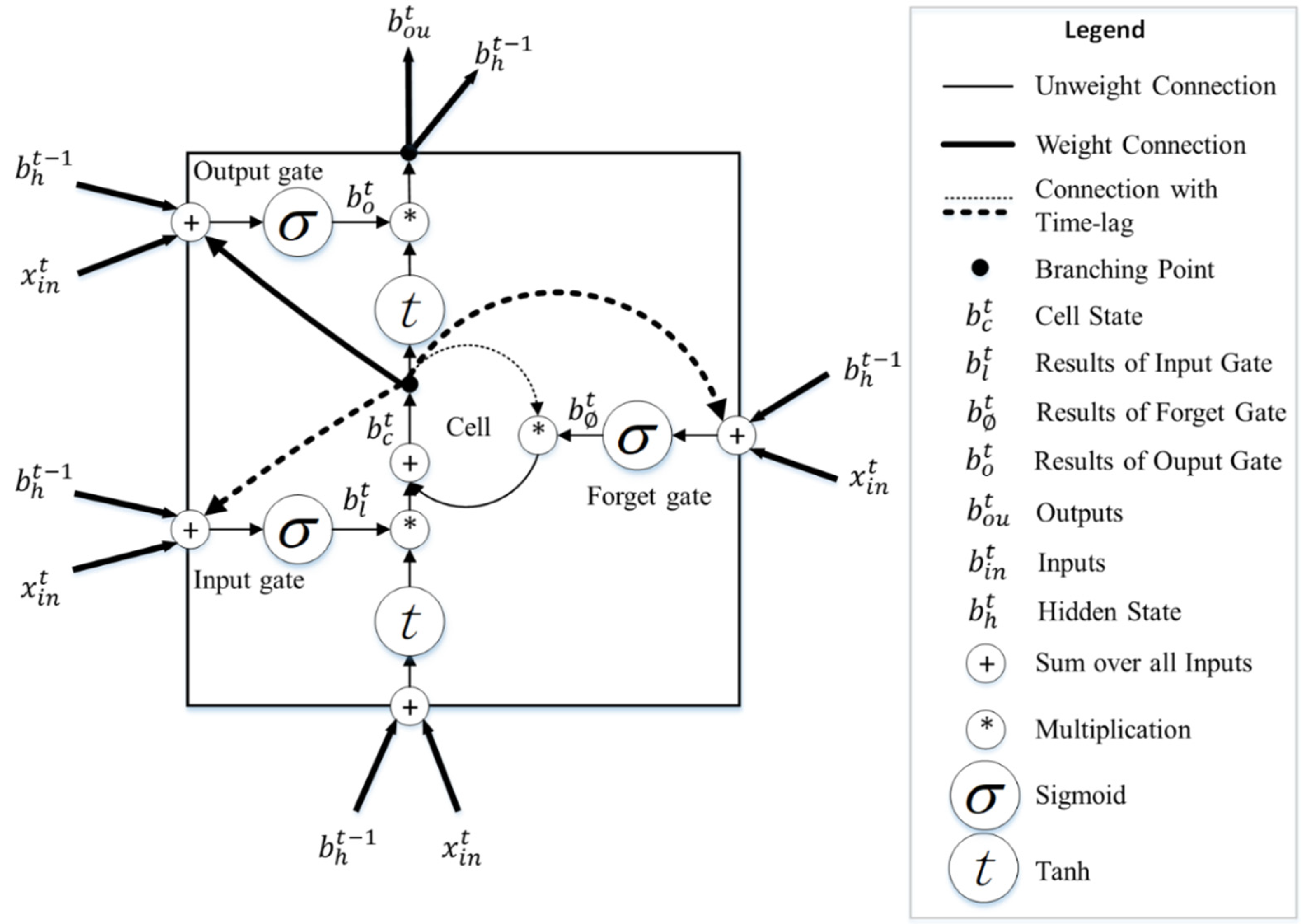
2.2. LSTM Neural Network Architecture
2.3. Matching of LSTM and State Equation
3. The LSTM-PF Algorithm
3.1. Environmental Vector
3.2. Temperature Compensation Algorithm
3.3. Feedback for Eliminating Measurement Outliers from Remote Cloud Platforms
3.4. Computation Procedure
4. Numerical Example
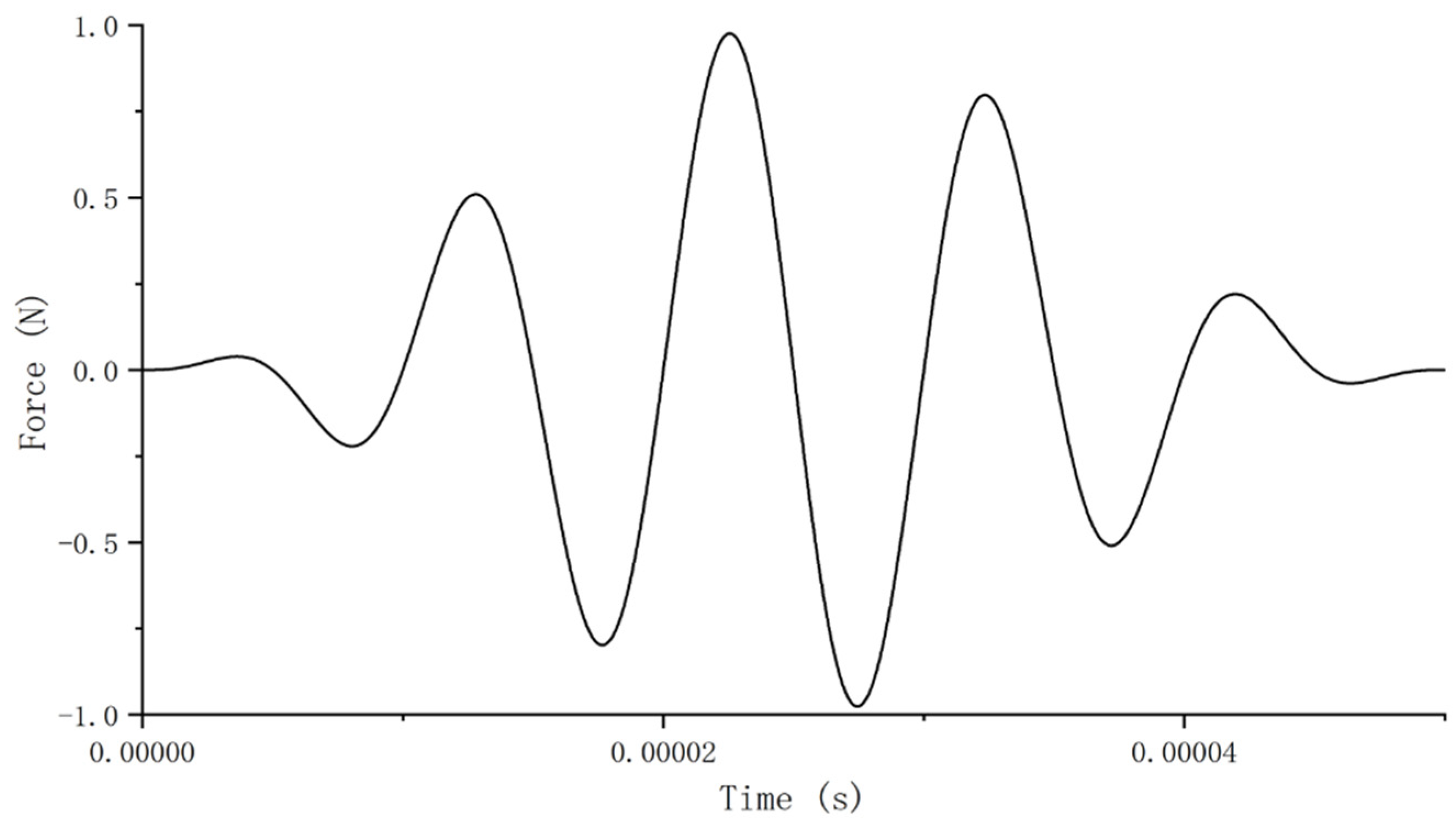
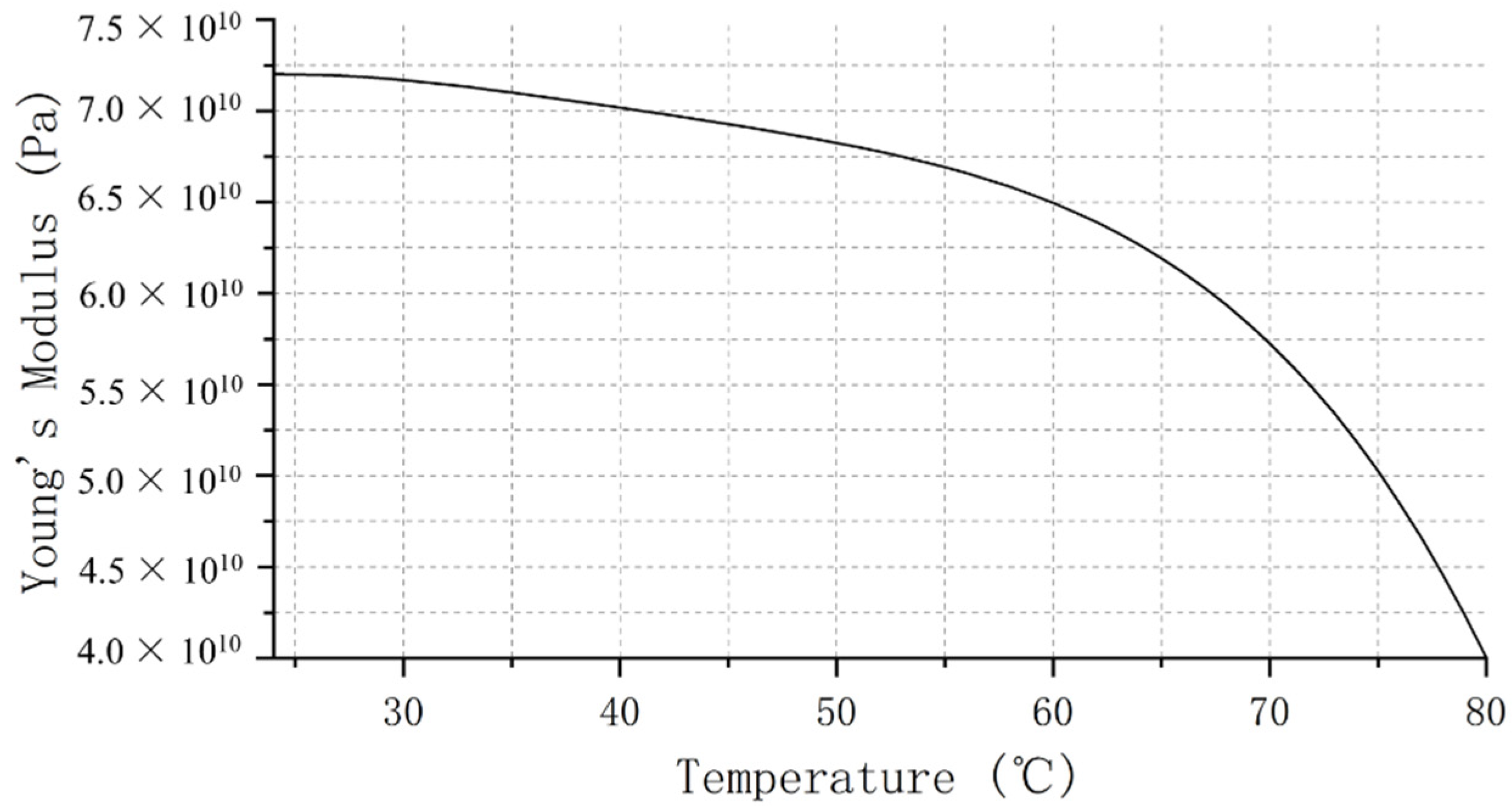
4.1. FE Model
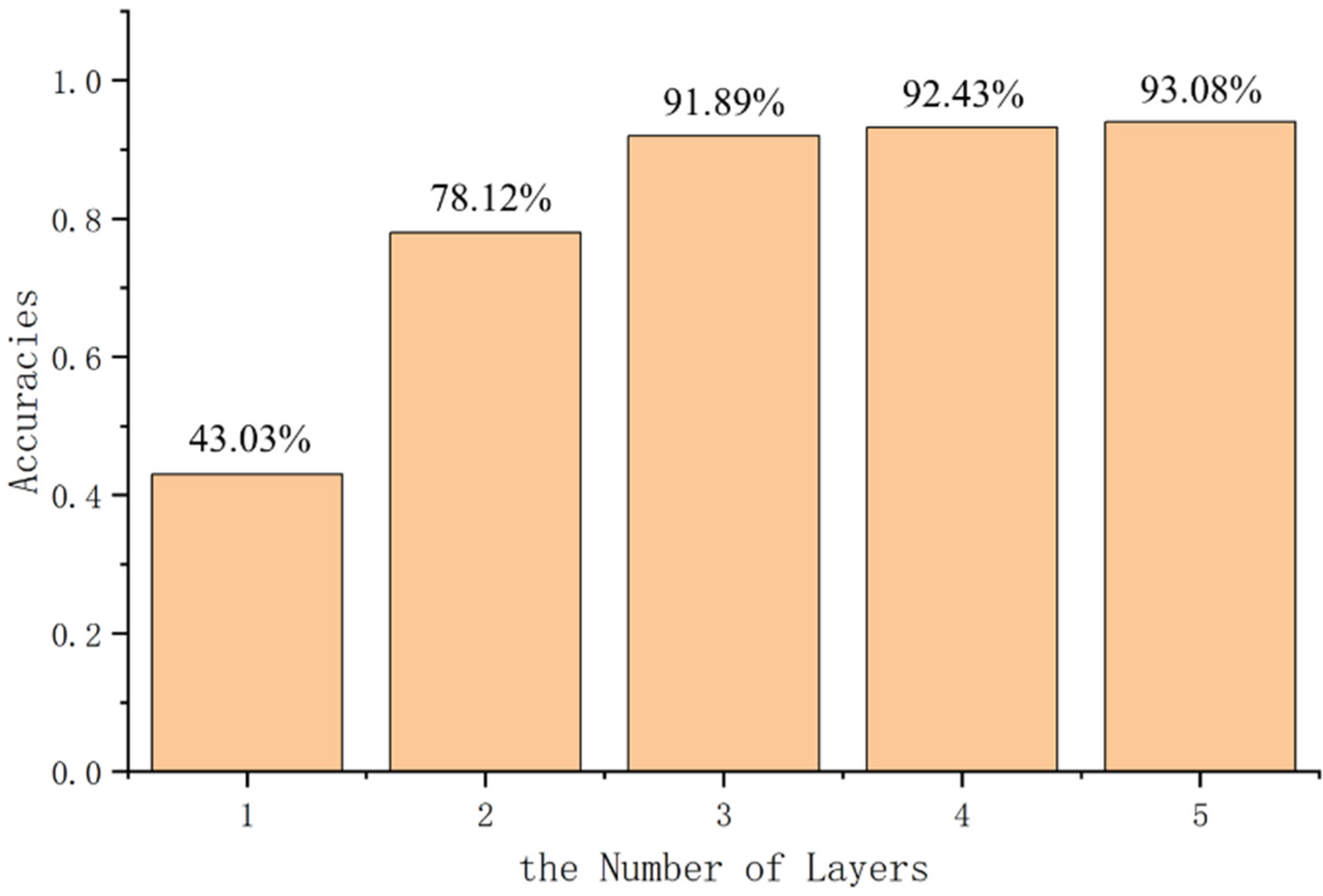
4.2. LSTM Training and LSTM-PF Model
4.3. Linear Regression for Temperature Compensation
4.4. Results and Discuss
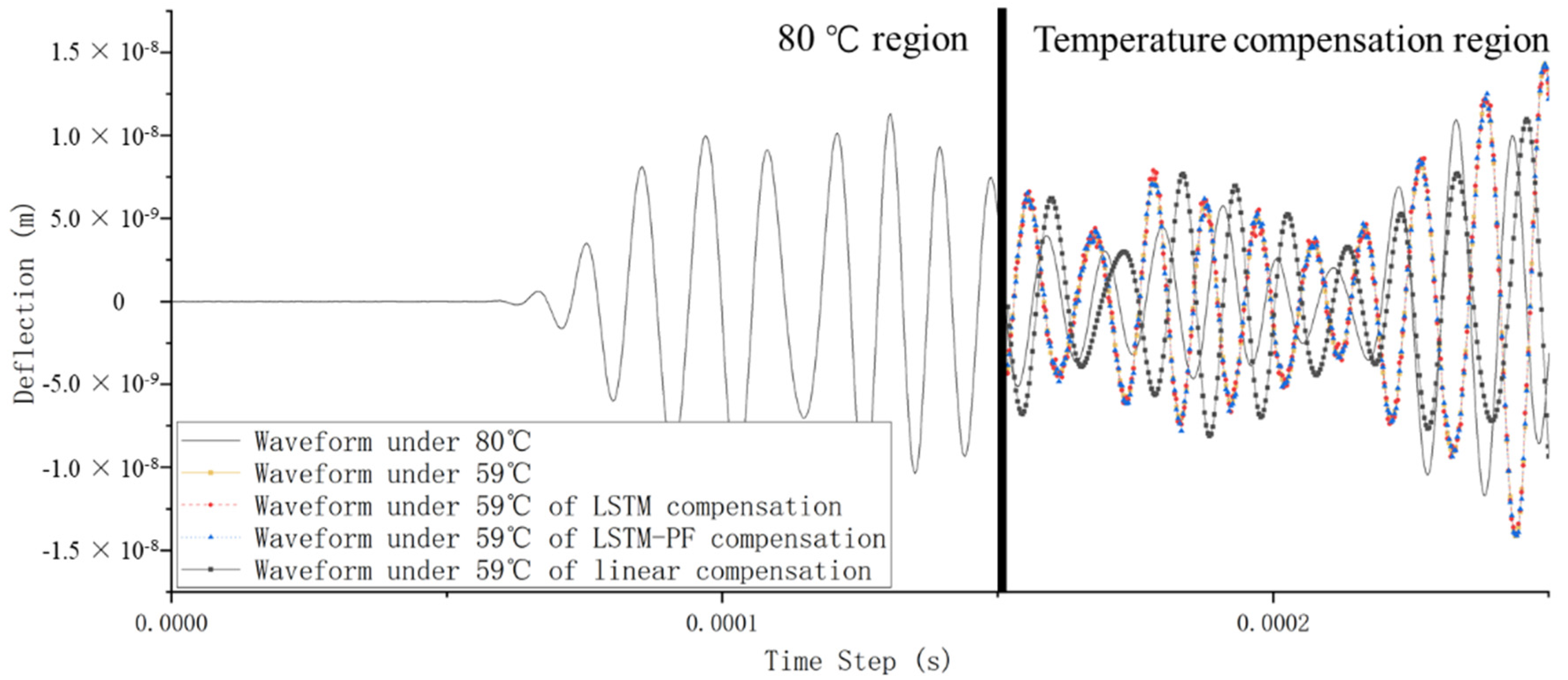
4.4.1. The Signal without Outliers
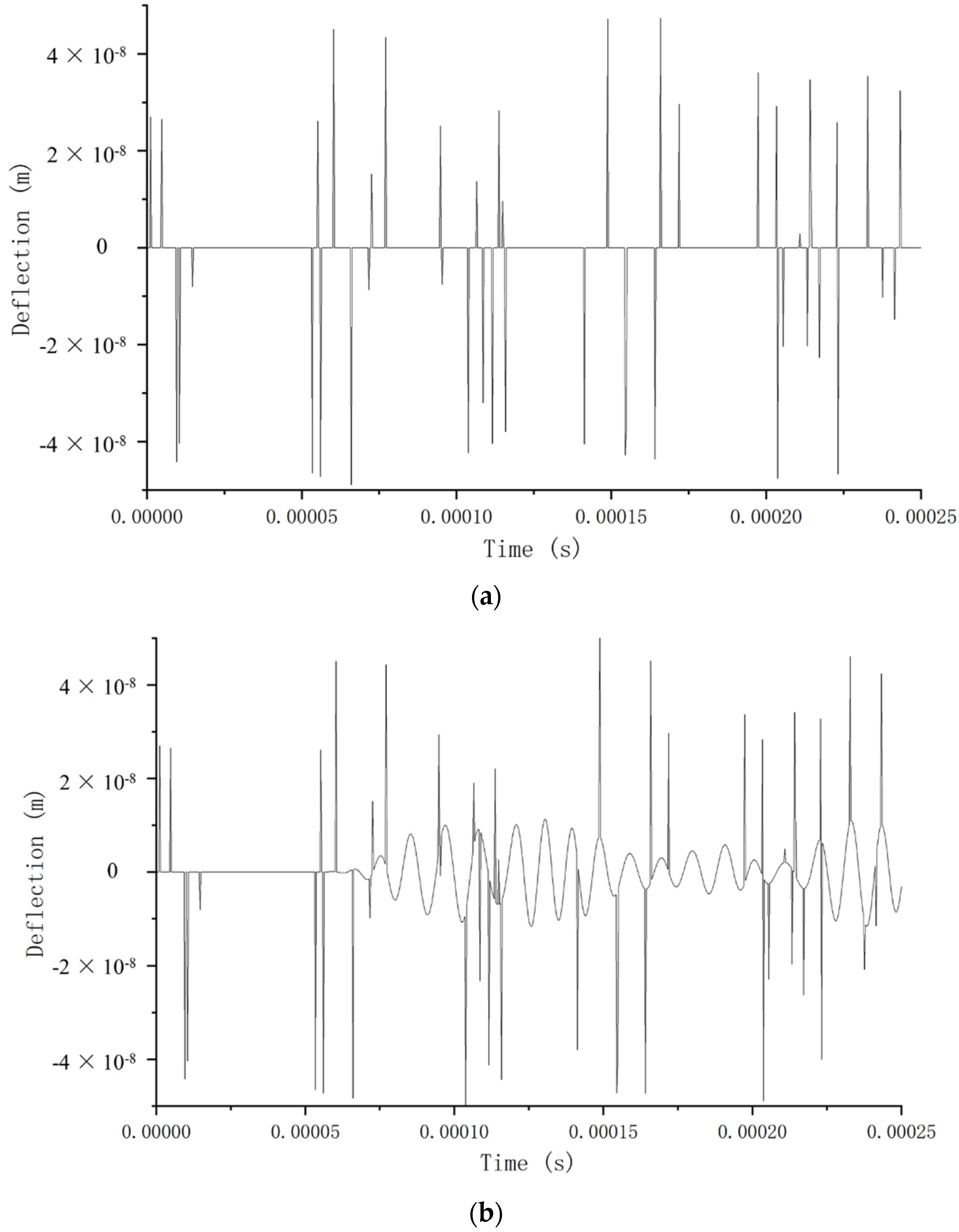
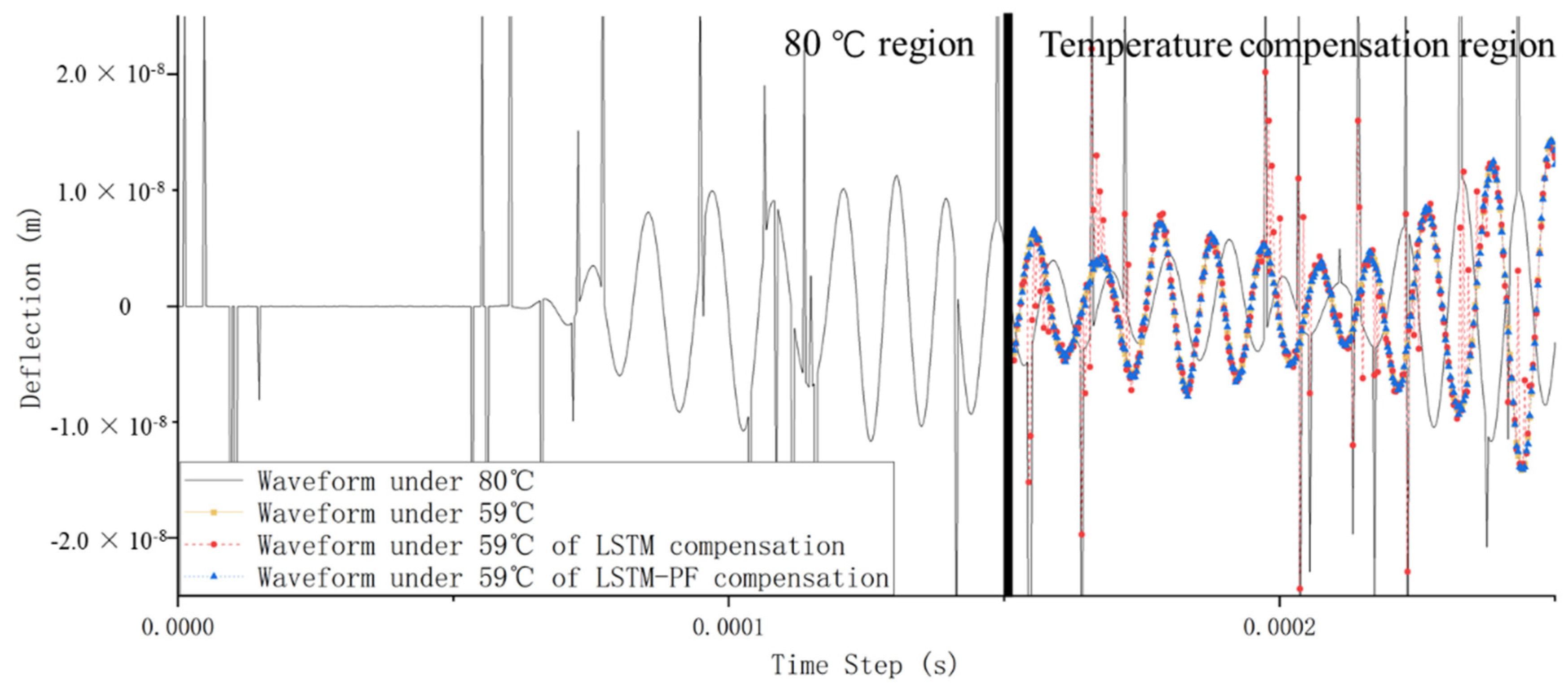
4.4.2. The Signal Containing Outliers
5. Temperature Compensation for a Real Bridge
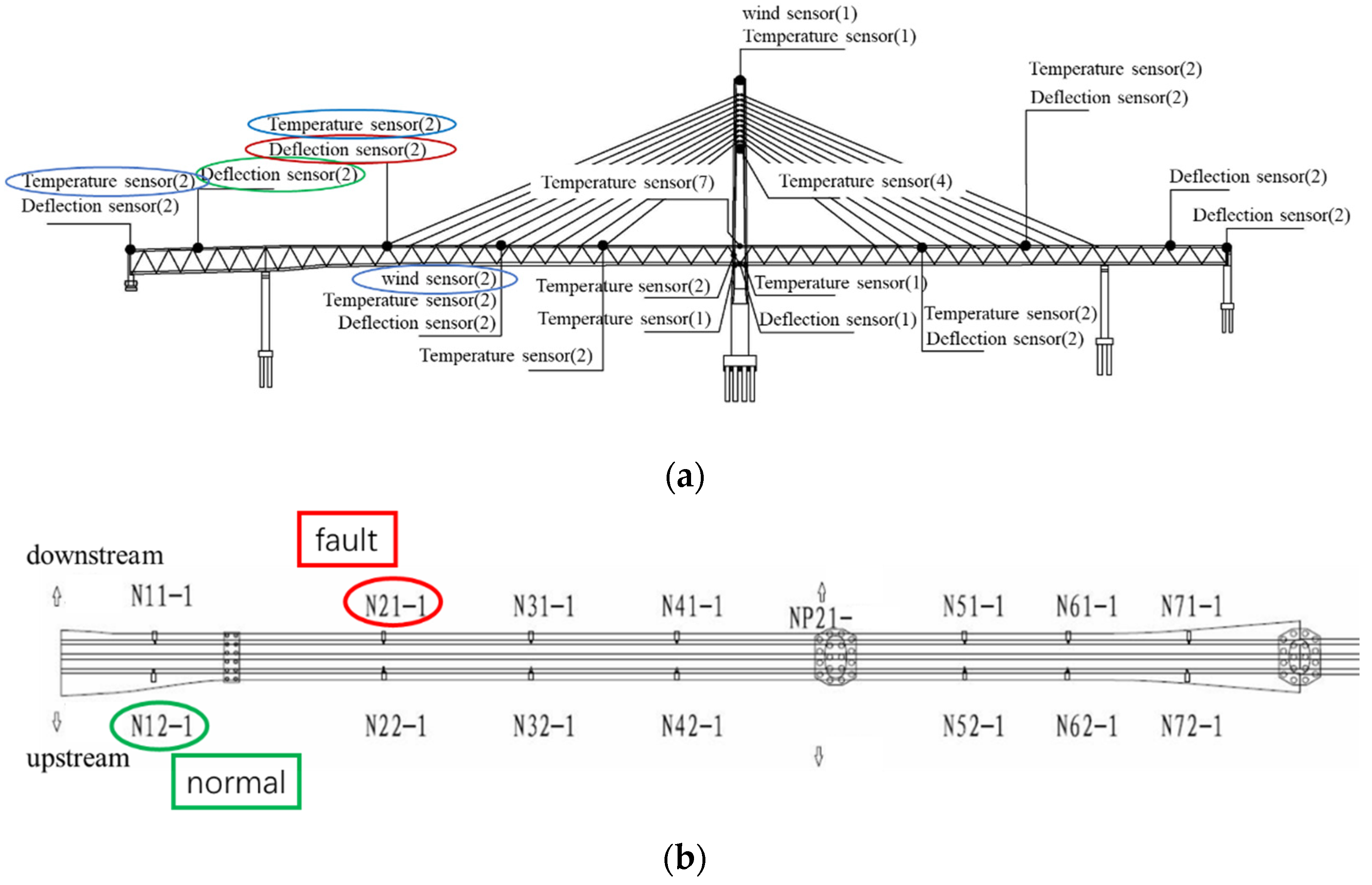
5.1. A Large-Scale Suspension Bridge
5.2. Calculation Model
5.3. Results and Comparision
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, Y.; Lu, H.; Tan, X.; Chai, H.K.; Wang, R.; Zhang, Y. Fundamental mode shape estimation and element stiffness evaluation of girder bridges by using passing tractor-trailers. Mech. Syst. Signal Process. 2022, 169, 108746. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Tan, X. Review on Vibration-Based Structural Health Monitoring Techniques and Technical Codes. Symmetry 2021, 13, 1998. [Google Scholar] [CrossRef]
- Yang, Y.; Ling, Y.; Tan, X.; Wang, S.; Wang, R. Damage identification of frame structure based on approximate Metropolis–Hastings algorithm and probability density evolution method. Int. J. Struct. Stab. Dyn. 2022, 22, 2240014. [Google Scholar] [CrossRef]
- Farrar, C.R.; Baker, W.E.; Bell, T.M.; Cone, K.M.; Darling, T.W.; Duffey, T.A.; Eklund, A.; Migliori, A. Dynamic characterization and damage detection in the I-40 bridge over the Rio Grande. Puerto Rico Health Sci. J. 2005, 24, 323. [Google Scholar]
- Xia, Y.; Hao, H.; Zanardo, G.; Deeks, A. Long term vibration monitoring of an RC slab: Temperature and humidity effect. Eng. Struct. 2006, 28, 441–452. [Google Scholar] [CrossRef]
- Sohn, H.; Dzwonczyk, M.; Straser, E.G.; Kiremidjian, A.S.; Law, K.H.; Meng, T. An Experimental Study of Temperature Effect on Modal Parameters of the Alamosa Canyon Bridge. Earthq. Eng. Struct. Dyn. 2015, 28, 879–897. [Google Scholar] [CrossRef]
- Peeters, B.; Roeck, G.D. One-year monitoring of the Z24Bridge: Environmental effects versus damage events. Earthq. Eng. Struct. Dyn. 2015, 30, 149–171. [Google Scholar] [CrossRef]
- Worden, K.; Sohn, H.; Farrar, C.R. Novelty detection in a changing environment: Regression and interpolation approaches. J. Sound Vib. 2002, 258, 741–761. [Google Scholar] [CrossRef]
- Liang, Z. Research on Health Evaluation of Bridge Structures Based on Statistical Analysis of Monitored Data. Ph.D. Thesis, Optical Engineering, College of Optronics Engineering, University of Chongqing, Chongqing, China, 2006. [Google Scholar]
- Sohn, H. Effects of Environmental and Operational Variability on Structural Health Monitoring. Philos. Trans. A Math. Phys. Eng. Sci. 2007, 365, 539–560. [Google Scholar] [CrossRef]
- Fritzen, C.R.; Mengelkamp, G.; Guemes, A. Elimination of temperature effects on damage detection within a smart structure concept. Struct. Health Monit. 2003, 15, 530–538. [Google Scholar]
- Cross, E.J.; Manson, G.; Worden, K.; Pierce, S.G. Features for damage detection with insensitivity to environmental and operational variations. Proc. Math. Phys. Eng. Sci. 2012, 468, 4098–4122. [Google Scholar] [CrossRef]
- Martín, D.; Fuentes-Lorenzo, D.; Bordel, B.; Alcarria, R. Towards Outlier Sensor Detection in Ambient Intelligent Platforms—A Low-Complexity Statistical Approach. Sensors 2020, 20, 4217. [Google Scholar] [CrossRef] [PubMed]
- Victor, G.F.; Carles, G.; Helena, R.P. A Comparative Study of Anomaly Detection Techniques for Smart City Wireless Sensor Networks. Sensors 2016, 16, 868. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian Tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Kitagawa, G. Monte Carlo Filter and Smoother for Non-Gaussian Nonlinear State Space Models. J. Comput. Graph. Stat. 1996, 5, 1–25. [Google Scholar]
- Strobelt, H.; Gehrmann, S.; Pfister, H.; Rush, A.M. LSTMVis: A Tool for Visual Analysis of Hidden State Dynamics in Recurrent Neural Networks. IEEE Trans. Vis. Comput. Graph. 2017, 24, 667–676. [Google Scholar] [CrossRef]
- Greff, K.; Srivastava, R.K.; Koutník, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A Search Space Odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2015, 28, 2222–2232. [Google Scholar] [CrossRef]
- Chatzi, E.N.; Smyth, A.W. The unscented Kalman filter and particle filter methods for nonlinear structural system identification with non-collocated heterogeneous sensing. Struct. Control. Health Monit. 2010, 16, 99–123. [Google Scholar] [CrossRef]
- Chatzi, E.N.; Smyth, A.W. Nonlinear System Identification: Particle-Based Methods. In Encyclopedia of Earthquake Engineering; Springer: New York, NY, USA, 2014; pp. 1–18. [Google Scholar]
- Peoples, C. FIESTA-IoT project: Federated interoperable semantic IoT/cloud testbeds and applications. Comput. Rev. 2019, 60, 468. [Google Scholar]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly Detection: A Survey. ACM Comput. Surv. 2009, 41, 1–58. [Google Scholar] [CrossRef]
- Martín, D.; Bordel, B.; Alcarria, R. Automatic Detection of Erratic Sensor Observations in Ami Platforms: A Statistical Approach. Proceedings 2019, 31, 55. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| Temperature | 24 | 35 | 47 | 59 | 70 | 80 |
| Method | Scenarios | Mean | Variance |
|---|---|---|---|
| case 6 compensating case 4 | 0.22% | 0.39% | |
| LSTM | case 4 compensating case 2 | 0.34% | 0.53% |
| case 6 compensating case 1 | 0.57% | 0.51% | |
| case 6 compensating case 4 | 0.12% | 0.21% | |
| LSTM-PF | case 4 compensating case 2 | 0.35% | 0.42% |
| case 6 compensating case 1 | 0.32% | 0.23% | |
| case 6 compensating case 4 | 4.07% | 288.31% | |
| linear regression | case 4 compensating case 2 | 0.93% | 75.12% |
| case 6 compensating case 1 | 3.45% | 257.48% |
| Method | Mean | Variance |
|---|---|---|
| LSTM | 1.55% | 299.38% |
| LSTM-PF | 0.13% | 0.22% |
| Method | Mean | Variance |
|---|---|---|
| LSTM-PF (absolute) | 0.3081 (dm) | 0.0665 (dm) |
| LSTM-PF (relative) | 4.44% | 2.63% |
| LSTM (absolute) | 0.4907 (dm) | 0.1120 (dm) |
| LSTM (relative) | 7.49% | 4.44% |
| Method | Mean | Variance |
|---|---|---|
| LSTM | 2.4233 (dm) | 1.9413 (dm) |
| LSTM-PF | 0.4170 (dm) | 0.0760 (dm) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Li, Y.; Liu, G. Separation of the Temperature Effect on Structure Responses via LSTM—Particle Filter Method Considering Outlier from Remote Cloud Platforms. Remote Sens. 2022, 14, 4629. https://doi.org/10.3390/rs14184629
Qin Y, Li Y, Liu G. Separation of the Temperature Effect on Structure Responses via LSTM—Particle Filter Method Considering Outlier from Remote Cloud Platforms. Remote Sensing. 2022; 14(18):4629. https://doi.org/10.3390/rs14184629
Chicago/Turabian StyleQin, Yang, Yingmin Li, and Gang Liu. 2022. "Separation of the Temperature Effect on Structure Responses via LSTM—Particle Filter Method Considering Outlier from Remote Cloud Platforms" Remote Sensing 14, no. 18: 4629. https://doi.org/10.3390/rs14184629