
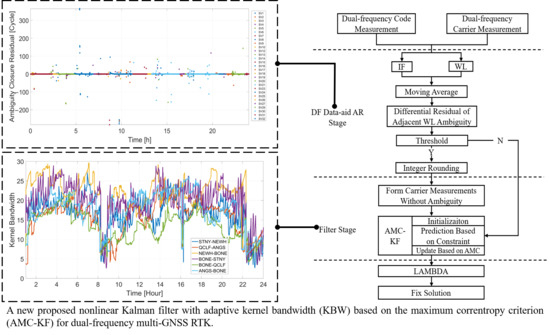
A Robust Nonlinear Filter Strategy Based on Maximum Correntropy Criterion for Multi-GNSS and Dual-Frequency RTK

 , ,
, ,
Abstract
:
1. Introduction
2. RTK Mathematic Model
2.1. Constrained Loosely Coupled Model
2.2. DF Data-Aided AR
3. AMC-KF
3.1. KF Based on MCC Derivation
3.2. AMC-KF Derivation
3.3. Filter Implementation
4. Test and Result
4.1. Position Accuracy Test
4.2. Adaptive Strategy Test
4.3. Ambiguity Resolution Analysis
5. Conclusions
- (1)
- For the positioning accuracy of short baselines, the RMS and STD of positioning error improved by more than 30%, 30%, and 60% on the E, N, and U components, respectively. The applicability and flexibility of the proposed AMC-KF are validated significantly.
- (2)
- For the proposed adaptive KBW, the efficiency and accuracy are compared and validated with fixed KBW (1, 5, 25, 30). The results show that large KBWs increase the computational load, while the small KBWs gain a worse positioning accuracy. The proposed optimization strategy can change the KBW adaptively according to the measurements and is validated to be effective as it considers both efficiency and accuracy.
- (3)
- A total of 29 satellites were involved in the ambiguity resolution test with long baselines. It validates that the proposed DF data-aided AR method achieves a success rate of more than 93%. The results are expected to be further improved with stringent data synchronization and cycle-slip detection.
- (4)
- For the long baseline test, the proposed filter strategy obtains an improvement of more than 40% in all directions as the noise is effectively suppressed. For the longer baseline BONE-WBEE, the RMS of positioning error is reduced by more than 75% on E, N, and U, which shows that the proposed method plays a better role in long baseline RTK when the multi-GNSS multi-frequency data is stably available.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Liu, J.; Zhang, B.; Liu, T.; Xu, G.; Ji, Y.; Sun, M.; Nie, W.; He, Y. An efficient UD factorization implementation of Kalman filter for RTK based on equivalent principle. Remote Sens. 2022, 14, 967. [Google Scholar] [CrossRef]
- Zhang, K.; Jiao, W.; Wang, L.; Li, Z.; Zhou, K. Smart-RTK: Multi-GNSS kinematic positioning approach on Android smart devices with doppler-smoothed-code filter and constant acceleration model. Adv. Space Res. 2019, 64, 1662–1674. [Google Scholar] [CrossRef]
- Deng, C.; Tang, W.; Liu, J.; Shi, C. Reliable single-epoch ambiguity resolution for short baselines using combined GPS/BeiDou system. GPS Solut. 2014, 18, 375–386. [Google Scholar] [CrossRef]
- Sun, Q.; Xia, J.; Foster, J.; Falkmer, T.; Lee, H. Pursuing precise vehicle movement trajectory in urban residential area using multi-GNSS RTK tracking. Transp. Res. Procedia 2017, 25, 2361–2376. [Google Scholar] [CrossRef]
- Atz, M.F.; Konukseven, C.; Sermet, T.C.; Alay, S. Comparative analysis of the performance of Multi-GNSS RTK: A case study in Turkey. Int. J. Eng. Geosci. 2022, 7, 67–80. [Google Scholar] [CrossRef]
- Al-Shaery, A.; Zhang, S.; Lim, S.; Rizos, C. Multi-GNSS Opportunities and Challenges; Pres at the EGU General Assembly; European Geosciences Union: Vienna, Austria, 2012. [Google Scholar]
- Deng, C.; Liu, Q.; Zou, X.; Tang, W.; Cui, J.; Wang, Y.; Guo, C. Investigation of tightly combined single-frequency and single-epoch precise positioning using multi-GNSS data. Remote Sens. 2020, 12, 285. [Google Scholar] [CrossRef]
- Chen, C.; Chang, G. PPPLib: An open-source software for precise point positioning using GPS, BeiDou, Galileo, GLONASS, and QZSS with multi-frequency observations. GPS Solut. 2021, 25, 18. [Google Scholar] [CrossRef]
- Ibrahim, A.S.; Yacoub, A.M.; Aloi, D.N. A 3-dimensional multiband antenna for vehicular 5G sub-6 GHz/GNSS/V2X applications. Int. J. Antennas Propag. 2022, 2022, 5609110. [Google Scholar] [CrossRef]
- Li, X.; Wang, H.; Li, S.; Feng, S.; Wang, X.; Liao, J. GIL: A tightly coupled GNSS PPP/INS/LiDAR method for precise vehicle navigation. Satell. Navig. 2021, 2, 26. [Google Scholar] [CrossRef]
- Bai, L.; Sun, C.; Dempster, A.G.; Zhao, H.; Cheong, J.W.; Feng, W. GNSS-5G hybrid positioning based on multi-rate measurements fusion and proactive measurement uncertainty prediction. IEEE Trans. Instrum. Meas. 2022, 71, 8501415. [Google Scholar] [CrossRef]
- Xin, S.; Geng, J.; Zeng, R.; Zhang, Q.; Ortega-Culaciati, F.; Wang, T. In-situ real-time seismogeodesy by integrating multi-GNSS and accelerometers. Measurement 2021, 179, 109453. [Google Scholar] [CrossRef]
- Vagle, N.; Broumandan, A.; Lachapelle, G. Multiantenna GNSS and inertial sensors/odometer coupling for robust vehicular navigation. IEEE Internet Things J. 2018, 5, 4816–4828. [Google Scholar] [CrossRef]
- Bonnor, N. Principles of GNSS, inertial, and multisensor integrated navigation systems—Second EditionPaul D. Groves Artech House, 2013, 776 pp ISBN-13: 978-1-60807-005-3. J. Navig. 2014, 67, 191–192. [Google Scholar] [CrossRef]
- Broumandan, A.; Lachapelle, G. Spoofing detection using GNSS/INS/Odometer coupling for vehicular navigation. Sensors 2018, 18, 1305. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P. Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution. GPS Solut. 2013, 17, 521–533. [Google Scholar] [CrossRef]
- Gao, W.; Pan, S.; Gao, C.; Wang, Q.; Shang, R. Tightly combined GPS and GLONASS for RTK positioning with consideration of differential inter-system phase bias. Meas. Sci. Technol. 2019, 30, 054001. [Google Scholar] [CrossRef]
- Li, X.; Wang, B.; Li, X.; Huang, J.; Lyu, H.; Han, X. Principle and performance of multi-frequency and multi-GNSS PPP-RTK. Satell. Navig. 2022, 3, 7. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B. Estimation of code observation-specific biases (OSBs) for the modernized multi-frequency and multi-GNSS signals: An undifferenced and uncombined approach. J. Geod. 2021, 95, 97. [Google Scholar] [CrossRef]
- Psychas, D. Fast and Reliable Multi-GNSS Precise Point Positioning with Integer Ambiguity Resolution. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, January 2022. [Google Scholar]
- Zhang, G.; Xu, P.; Xu, H.; Hsu, L.-T. Prediction on the urban GNSS measurement uncertainty based on deep learning networks with long short-term memory. IEEE Sens. J. 2021, 21, 20563–20577. [Google Scholar] [CrossRef]
- Smola, A.; Gretton, A.; Le, S.; Schlkopf, B. A hilbert space embedding for distributions. In Proceedings of the International Conference on Algorithmic Learning Theory, Sendai, Japan, 1–4 October 2007. [Google Scholar]
- Li, T.; Zhang, H.; Gao, Z.; Chen, Q.; Niu, X. High-accuracy positioning in urban environments using single-frequency multi-GNSS RTK/MEMS-IMU integration. Remote Sens. 2018, 10, 205. [Google Scholar] [CrossRef] [Green Version]
- Gong, X.; Zheng, F.; Gu, S.; Zhang, Z.; Lou, Y. The long-term characteristics of GNSS signal distortion biases and their empirical corrections. GPS Solut. 2022, 26, 52. [Google Scholar] [CrossRef]
- Chen, B.; Wang, X.; Li, Y.; Principe, J.C. Maximum correntropy criterion with variable center. IEEE Signal Process. Lett. 2019, 26, 1212–1216. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, Y.; Liu, H.; Wang, J. Learning local–global multiple correlation filters for robust visual tracking with Kalman filter redetection. Sensors 2021, 21, 1129. [Google Scholar] [CrossRef]
- Valipour, M.; Ricardez-Sandoval, L.A. Abridged Gaussian sum extended Kalman filter for nonlinear state estimation under non-Gaussian process uncertainties. Comput. Chem. Eng. 2021, 155, 107534. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, W.; Zuo, J.; Wang, H. Outlier-robust Kalman filters with mixture correntropy. J. Franklin Inst. 2020, 357, 5058–5072. [Google Scholar] [CrossRef]
- Sahmoudi, M.; Landry, R. A nonlinear filtering approach for robust multi-GNSS RTK positioning in presence of multipath and ionospheric delays. IEEE J. Sel. Top. Signal Process. 2009, 3, 764–776. [Google Scholar] [CrossRef]
- Flores, T.K.S.; Villanueva, J.M.M.; Gomes, H.P.; Catunda, S.Y.C. Adaptive pressure control system based on the maximum correntropy criterion. Sensors 2021, 21, 5156. [Google Scholar] [CrossRef] [PubMed]
- Hu, C.; Wang, G.; Ho, K.; Liang, J. Robust ellipse fitting with Laplacian kernel based maximum correntropy criterion. IEEE Trans. Image Process. 2021, 30, 3127–3141. [Google Scholar] [CrossRef]
- Xiong, W.; Schindelhauer, C.; So, H.C.; Wang, Z. Maximum correntropy criterion for robust TOA-based localization in NLOS environments. Circuits Syst. Signal Process. 2021, 40, 6325–6339. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, D.; Lv, S. Robust maximum correntropy criterion subband adaptive filter algorithm for impulsive noise and noisy input. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 604–608. [Google Scholar] [CrossRef]
- Fakoorian, S.; Santamaria-Navarro, A.; Lopez, B.T.; Simon, D.; Agha-mohammadi, A.-A. Towards robust state estimation by boosting the maximum correntropy criterion Kalman filter with adaptive behaviors. IEEE Robot. Autom. Lett. 2021, 6, 5469–5476. [Google Scholar] [CrossRef]
- Fan, X.; Wang, G.; Han, J.; Wang, Y. Interacting multiple model based on maximum correntropy Kalman filter. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3017–3021. [Google Scholar] [CrossRef]
- Zhao, W.; Zhao, H.; Liu, L. A single beacon-aided cooperative localization algorithm based on maximum correntropy criterion. In Proceedings of the 2021 International Wireless Communications and Mobile Computing (IWCMC), Harbin, China, 28 June–2 July 2021; pp. 1835–1839. [Google Scholar]
- Chen, B.; Xing, L.; Zhao, H.; Xu, B.; Principe, J.C. Robustness of maximum correntropy estimation against large outliers. arXiv 2017, arXiv:1703.08065. [Google Scholar]
- Odolinski, R.; Teunissen, P.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2015, 19, 151–163. [Google Scholar] [CrossRef]
- Wang, J.; Xu, T.; Nie, W.; Xu, G. A simplified processing algorithm for multi-baseline RTK positioning in urban environments. Measurement 2021, 179, 109446. [Google Scholar] [CrossRef]
- Chen, P.; Ma, Y.; Liu, H.; Zheng, N. A new global tropospheric delay model considering the spatiotemporal variation characteristics of ZTD with altitude coefficient. Earth Space Sci. 2020, 7, e2019EA000888. [Google Scholar] [CrossRef]
- Lai, C.; Guo, R. Extend the RTK survey to GNSS-denied areas using a low-cost inertial-aided positioning pole. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, MO, USA, 20–24 September 2021; pp. 3212–3226. [Google Scholar]
- Liu, Y.; Gao, Z.; Xu, Q.; Li, Y.; Chen, L. Assessing partial ambiguity resolution and WZTD-constraint multi-frequency RTK in an urban environment using new BDS signals. GPS Solut. 2022, 26, 88. [Google Scholar] [CrossRef]
- Miwa, M.; Ushiroda, T. Precision flight drones with RTK-GNSS. J. Robot. Mechatron. 2021, 33, 371–378. [Google Scholar] [CrossRef]
- Xue, X.; Qin, H.; Lu, H. High-precision time synchronization of kinematic navigation system using GNSS RTK differential carrier phase time transfer. Measurement 2021, 176, 109132. [Google Scholar] [CrossRef]
- Roberts, G.W.; Tang, X.; Brown, C.J. Measurement and correlation of displacements on the Severn Suspension Bridge using GPS. Appl. Geomat. 2018, 11, 161–176. [Google Scholar] [CrossRef]
- Teunissen, P. Towards a unified theory of GNSS ambiguity resolution. J. Glob. Position. Syst. 2003, 2, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Singh, A.; Principe, J.C. Using Correntropy as a cost function in linear adaptive filters. In Proceedings of the 2009 International Joint Conference on Neural Networks, Atlanta, GA, USA, 14–19 June 2009. [Google Scholar]
- Chen, B.; Xing, L.; Zhao, H.; Du, S.; Príncipe, J.C. Effects of outliers on the maximum correntropy estimation: A robustness analysis. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 4007–4012. [Google Scholar] [CrossRef]
- Lu, L.; Zhao, H. Active impulsive noise control using maximum correntropy with adaptive kernel size. Mech. Syst. Signal Process. 2017, 87, 180–191. [Google Scholar] [CrossRef]
- Cinar, G.T.; Principe, J.C. Hidden state estimation using the Correntropy Filter with fixed point update and adaptive kernel size. In Proceedings of the 2012 International Joint Conference on Neural Networks (IJCNN), Brisbane, Australia, 10–15 June 2012. [Google Scholar]
- Chen, B.; Liu, X.; Zhao, H.; Principe, J.C. Maximum correntropy Kalman filter. Automatica 2017, 76, 70–77. [Google Scholar] [CrossRef]
- Liu, W.; Pokharel, P.P.; Principe, J.C. Correntropy: Properties and applications in non-Gaussian signal processing. IEEE Trans. Signal Process. 2007, 55, 5286–5298. [Google Scholar] [CrossRef]
- Izanloo, R.; Fakoorian, S.A.; Yazdi, H.S.; Dan, S. Kalman filtering based on the maximum correntropy criterion in the presence of non-Gaussian noise. In Proceedings of the 2016 Annual Conference on Information Science and Systems (CISS), Princeton, NJ, USA, 16–18 March 2016. [Google Scholar]
- Heravi, A.R.; Hodtani, G.A. A new information theoretic relation between minimum error entropy and maximum correntropy. IEEE Signal Process. Lett. 2018, 25, 921–925. [Google Scholar] [CrossRef]
- Fakoorian, S.; Izanloo, R.; Shamshirgaran, A.; Dan, S. Maximum correntropy criterion Kalman filter with adaptive kernel size. In Proceedings of the 2019 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 15–19 July 2019. [Google Scholar]
- Botev, Z.I.; Grotowski, J.F.; Kroese, D.P. Kernel density estimation via diffusion. Ann. Stat. 2010, 38, 2916–2957. [Google Scholar] [CrossRef]
- Hou, P.; Zhang, B.; Yasyukevich, Y.V.; Liu, T.; Zha, J. Multi-frequency phase-only PPP-RTK model applied to BeiDou data. GPS Solut. 2022, 26, 76. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Baseline | Distance (km) | Sample Interval | Cut-Off Elevation | Processing Model |
|---|---|---|---|---|---|
| 1 | STNY-NEWH | 19.562 | 30 s | 10° | AMC-KF, DD-KF |
| 2 | BONE-QCLF | 26.363 | 30 s | 10° | AMC-KF, DD-KF |
| 3 | BONE-STNY | 29.231 | 30 s | 10° | AMC-KF, DD-KF |
| 4 | QCLF-ANGS | 41.335 | 30 s | 10° | AMC-KF, DD-KF |
| 5 | NEWH-BONE | 42.606 | 30 s | 10° | AMC-KF, DD-KF |
| 6 | ANGS-BONE | 60.213 | 30 s | 10° | AMC-KF, DD-KF |
| 7 | BONE-WBEE | 58.942 | 30 s | 10° | AMC-KF, DD-KF |
| 8 | BONE-GSBN | 106.877 | 30 s | 10° | AMC-KF, DD-KF |
| Baseline | E | N | U | Improvement on ENU | ||||
|---|---|---|---|---|---|---|---|---|
| AMC-KF | DD-KF | AMC-KF | DD-KF | AMC-KF | DD-KF | |||
| RMSE (m) | BONE-QCLF | 0.13417 | 0.28258 | 0.20254 | 0.43671 | 0.30294 | 0.80099 | +52.52%, +53.62%, +62.18% |
| QCLF-ANGS | 0.09421 | 0.23641 | 0.17402 | 0.23035 | 0.27439 | 0.96756 | +60.15%, +24.45%, +71.64% | |
| ANGS-BONE | 0.16395 | 0.53574 | 0.18714 | 0.15190 | 0.26284 | 0.65454 | +69.40%, −23.20%, +59.84% | |
| STD (m) | BONE-QCLF | 0.10886 | 0.10066 | 0.18606 | 0.33062 | 0.30278 | 0.40077 | −8.15%, +43.72%, +24.45% |
| QCLF-ANGS | 0.08226 | 0.11478 | 0.16659 | 0.17340 | 0.26107 | 0.52163 | +28.33%, +3.93%, +49.95% | |
| ANGS-BONE | 0.16027 | 0.23124 | 0.16694 | 0.10958 | 0.24867 | 0.53847 | +30.69%, −52.35%, +53.82% | |
| RMSE (m) | BONE-STNY | 0.15830 | 0.35895 | 0.15017 | 0.42681 | 0.19493 | 1.32102 | +55.90%, +64.82%, +85.24% |
| STNY-NEWH | 0.13166 | 0.10709 | 0.13620 | 0.34410 | 0.19730 | 1.21688 | −22.94%, +60.42%, +83.79% | |
| NEWH-BONE | 0.17273 | 0.37092 | 0.13468 | 0.77698 | 0.19800 | 0.60796 | +53.43%, +82.67%, +67.43% | |
| STD (m) | BONE-STNY | 0.13460 | 0.19663 | 0.14762 | 0.27757 | 0.18249 | 0.85175 | +31.55%, +46.827%, +78.57% |
| STNY-NEWH | 0.11695 | 0.10515 | 0.13590 | 0.21013 | 0.19655 | 0.42460 | −11.22%, +35.33%, +53.71% | |
| NEWH-BONE | 0.10496 | 0.19900 | 0.13333 | 0.50321 | 0.19746 | 0.58359 | +47.26%, +73.50%, +66.16% | |
| Baseline | (−0.1, 0.1) | (−0.15, 0.15) | (0.5, 0.5) | Others |
|---|---|---|---|---|
| BONE_STNY | 98.6679% | 98.7700% | 99.0339% | 0.9661% |
| NEWH_BONE | 98.3097% | 98.5279% | 98.9901% | 1.0099% |
| STNY_NEWH | 98.8000% | 98.8726% | 99.1373% | 0.8627% |
| ∇∆Nclosure | Residual Range (Cycle) | ||||
|---|---|---|---|---|---|
| [0, 0.5) | [0.5, 1) | [1, 5) | [5, 10) | [10, +∞) | |
| Proportion | 93.1043% | 1.7154% | 2.7848% | 0.7914% | 1.6041% |
| Baseline | Model | RMS (m) | STD (m) | ||||
|---|---|---|---|---|---|---|---|
| E | N | U | E | N | U | ||
| BONE-WBEE | DD-KF | 0.87648 | 1.17600 | 1.38090 | 0.37734 | 0.37925 | 0.76978 |
| AMC-KF | 0.18754 | 0.13117 | 0.30743 | 0.13217 | 0.12794 | 0.30166 | |
| BONE-GSBN | DD-KF | 0.34605 | 0.58798 | 0.62407 | 0.29501 | 0.33371 | 0.50501 |
| AMC-KF | 0.14710 | 0.17921 | 0.36000 | 0.14426 | 0.17722 | 0.30130 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Liu, T.; Ji, Y.; Sun, M.; Lyu, M.; Xu, B.; Lu, Z.; Xu, G. A Robust Nonlinear Filter Strategy Based on Maximum Correntropy Criterion for Multi-GNSS and Dual-Frequency RTK. Remote Sens. 2022, 14, 4578. https://doi.org/10.3390/rs14184578
Liu J, Liu T, Ji Y, Sun M, Lyu M, Xu B, Lu Z, Xu G. A Robust Nonlinear Filter Strategy Based on Maximum Correntropy Criterion for Multi-GNSS and Dual-Frequency RTK. Remote Sensing. 2022; 14(18):4578. https://doi.org/10.3390/rs14184578
Chicago/Turabian StyleLiu, Jian, Tong Liu, Yuanfa Ji, Mengfei Sun, Mingyang Lyu, Bing Xu, Zhiping Lu, and Guochang Xu. 2022. "A Robust Nonlinear Filter Strategy Based on Maximum Correntropy Criterion for Multi-GNSS and Dual-Frequency RTK" Remote Sensing 14, no. 18: 4578. https://doi.org/10.3390/rs14184578