
Analysis and Demonstration of First Cross-Support Interferometry Tracking in China Mars Mission

 ,
,
Abstract
:
1. Introduction
2. Theorem and Methods
2.1. Basic Theorem of DeltaDOR
2.2. Algorithm Devloping and Analysis
- 1.
- Coarse Doppler estimation using over lapped FFT, then delay-rate vector with respect to time could be obtained based on Equation (11).
- 2.
- Delay rate and delay polynomial model could be obtained, with a constant offset coefficient.
- 3.
- A local model signal is computed with Equation (9).
- 4.
- Cross correlation with received signal and local model signal .
- 5.
- Compute the residual phase of which is used to update the delay polynomial model.
- 6.
- Refresh delay polynomial model by iteration, until there is no phase blur in the residual phase.
2.3. Station Clock Estimation
2.3.1. Station Clock Description
2.3.2. Fast Clock Estimation for Correlation
2.3.3. Analysis
3. Results
- 1.
- Tianwen-1 is switched to one-way mode during the observation. In addition, DOR tone is frequency coherent with the downlink carrier, and frequency coherence ratios are 1/440 and 1/2200, respectively.
- 2.
- Sequence of spacecraft–quasar–spacecraft–quasar is adopted, where a cycle time of 10 min per scan.
- 3.
- For the spacecraft scan, the Doppler frequency computed with prediction orbit is added to the standard frequency from Tianwen-1, and then channels are allocated to record tones while the tones exist in the channel center. In total, four channels are recorded, including the carrier, +1 DOR, +2DOR and −2DOR. Figure 6 shows the signal distribution and channel setting in DeltaDOR measurements.
- 4.
- For the quasar scan, the same down-converting frequency of the channel is set, with a different sample rate.
- 5.
- The TTCP recording system is used at ESOC tracking stations, data are recorded with a nominal 4 MHz bandwidth for the quasar scan and 50 KHz bandwidth for the spacecraft scan, and the quantization is 2 bits and 8 bits for each case, respectively. The same bandwidth and quantization parameters are adopted in CLTC stations.
3.1. Correlation of Data Processing
3.1.1. Clock Estimation
3.1.2. Correlation of Spacecraft Scan
3.2. Signal Quality Analysis
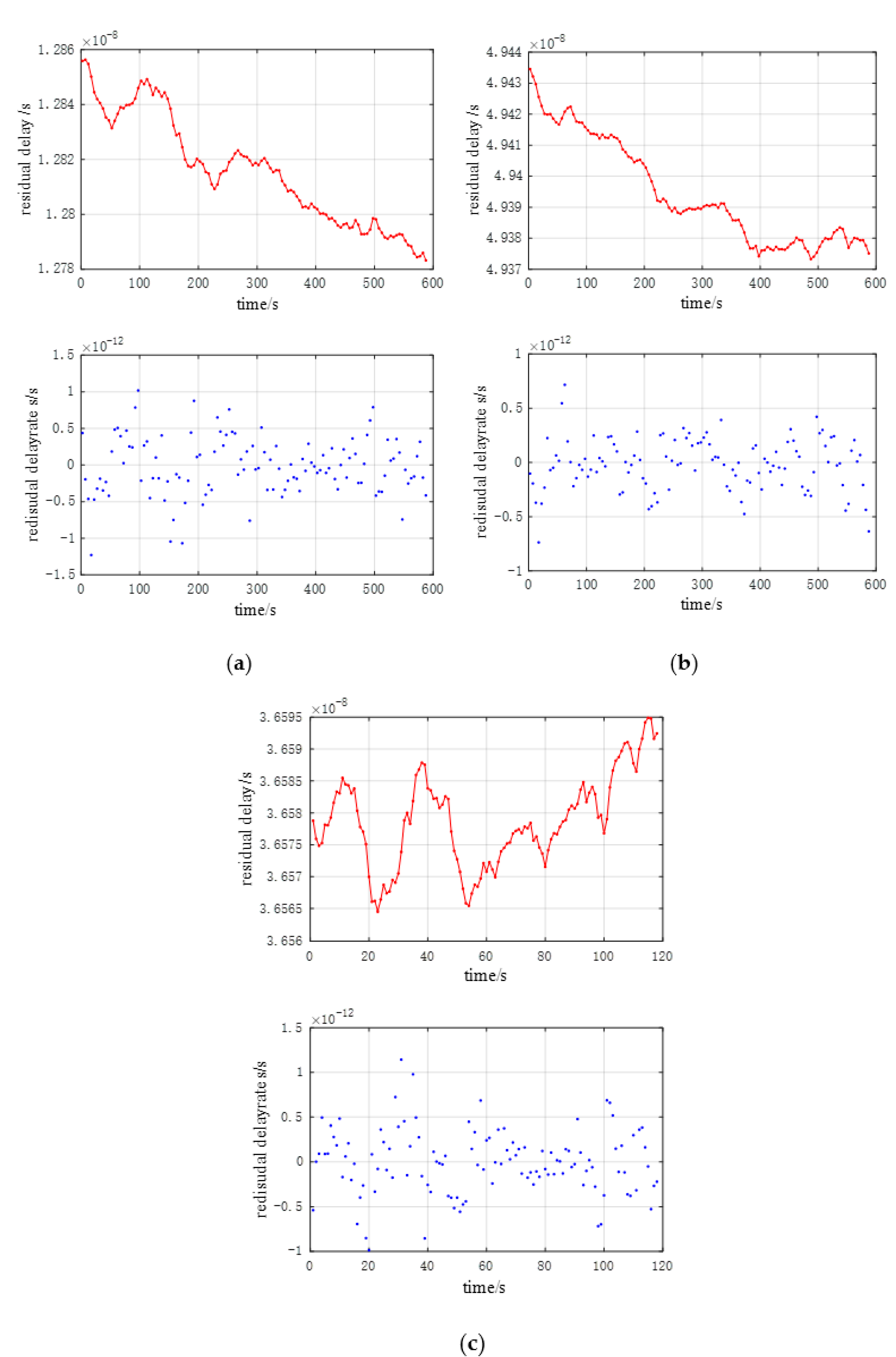
3.2.1. Spacecraft Scan
3.2.2. Quasar Scan
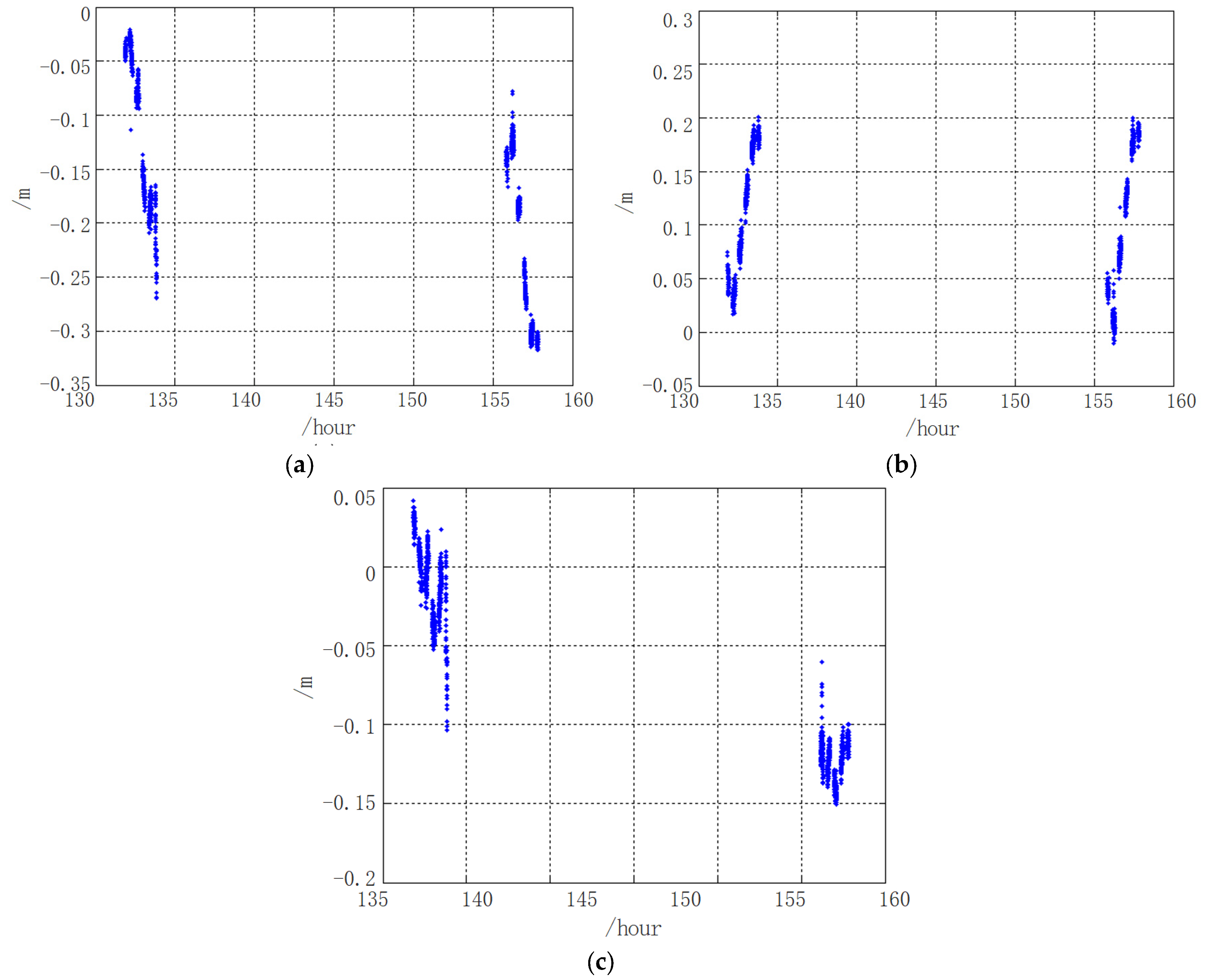
3.3. Accuracy Analysis and Comparison
3.3.1. Statistics Analysis
3.3.2. Comparison
3.4. Orbit Determinaiton Review
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Thornton, C.L.; Border, J.S. Radiometric Tracking Techniques for Deep Space Navigation; JPL Deep Space Communications and Navigation Series; John Wiley & Sons: Hoboken, NJ, USA, 2000; pp. 47–58. [Google Scholar]
- Acciarito, S.; Cardarilli, G.C.; Khanal, G.M.; Matta, M.; Re, M.; Silvestri, F.; Spanò, S.; Gelfusa, D.; Simone, L. Digital Architecture of Next Generation Spacecraft Tracker Based on Wideband ∆DOR. Lect. Notes Electr. Eng. 2019, 512, 17–24. [Google Scholar]
- Melbourne, W.G.; Curkendall, D.W. Radiometric Direction Finding: A New Approach to Deep Space Navigation. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Palo Alto, CA, USA, 1 September 1977. [Google Scholar]
- Fiori, F.; Tortora, P.; Zannoni, M.; Ardito, A.; Menapace, M.; Bellei, G.; Budnik, F.; Morley, T.; Mercolino, M.; Orosei, R. Deep Space Orbit Determination via Delta-DOR Using VLBI Antennas. CEAS Space J. 2022, 14, 421–430. [Google Scholar] [CrossRef]
- Li, T.; Liu, L.; Zheng, W.; Zhang, J. The Precision Analysis of the Chinese VLBI Network in Probe Delay Measurement. Res. Astron. Astrophys. 2022, 22, 035001. [Google Scholar] [CrossRef]
- Zheng, W.; Tong, F.; Zhang, J.; Liu, L.; Shu, F. Interferometry Imaging Technique for Accurate Deep Space Probe Positioning. Adv. Space Res. 2017, 60, 2847–2854. [Google Scholar] [CrossRef]
- Wood, J.S. NASA Technology Roadmaps Review. In Proceedings of the Robotics, Communications and Navigation Workshop; 2011. Available online: https://trs.jpl.nasa.gov/bitstream/handle/2014/42064/11-1196.pdf?sequence=1&isAllowed=y (accessed on 10 March 2017).
- Bagri, D.S.; Majid, W.A. Accurate Spacecraft Angular Position from DSN VLBI Phases Using X-band Telemetry or DOR Tones. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2009. [Google Scholar]
- Wang, H.B.; Yao, X. Evaluation of NASA’s Next-Generation Deep Space Network Evolvement Strategy. J. Spacecr. TTC Technol. 2016, 35, 443–449. [Google Scholar]
- Kroger, P.M.; Border, J.S.; Nandi, S. The Mars Observer Differential One-Way Range Demonstration. In TDA Prog. Rep.; 1994; pp. 42–117. Available online: https://ntrs.nasa.gov/api/citations/19940031036/downloads/19940031036.pdf (accessed on 27 June 2022).
- McKay, M.; Denis, M.; Mounzer, Z. Mars Express Operational Challenges and First Results. In Proceedings of the 55th International Astronautical Congress, Vancouver, BC, Canada, 4–8 October 2004. [Google Scholar]
- Border, J.S. A Global Approach to Delta Differential One-Way Range. In Proceedings of the 19th International Symposium on Space Flight Dynamics, Kanazawa, Japan, 4–11 June 2006. [Google Scholar]
- Curkendall, D.W.; Border, J.S. Delta-DOR: The One-Nanoradian Navigation Measurement System of the Deep Space Network—History, Architecture, and Componentry. IPN Prog. Rep. 2013, 42–193, 1–46. [Google Scholar]
- Maddè, R.; Morley, T.; Abelló, R.; Lanucara, M.; Mercolino, M.; Sessler, G.; de Vicente, J. Delta-DOR A New Technique for ESA’s Deep Space Navigation. ESA Bull. 2006, 128, 69–74. [Google Scholar]
- Madde, R.; Morley, T.; Lanucara, M.; Abello, R.; Mercolino, M.; De Vicente, J.; Sessler, G.M. A Common Receiver Architecture for ESA Radio Science and Delta-DOR Support. IEEE Spec. Issue Tech. Adv. Deep Space Commun. Track. 2007, 95, 2215–2223. [Google Scholar] [CrossRef]
- James, N.; Abello, R.; Lanucara, M.; Mercolino, M.; Maddè, R. Implementation of an ESA delta-DOR Capability. Acta Astronaut. 2009, 64, 1041–1049. [Google Scholar] [CrossRef]
- Takeuchi, H.; Tomiki, A.; Kobayashi, Y. A Study of Accuracy Improvement Methods for Delta DOR Measurements. IEICE Tech. Rep. Space Aeronaut. Navig. Electron. 2014, 114, 49–50. [Google Scholar]
- Takeuchi, H.; Horiuchi, S.; Phillips, C.; Edwards, P.; McCallum, J.; Dickey, J.; Ellingsen, S.; Yamaguchi, T.; Ichikawa, R.; Takefuji, K.; et al. Delta-DOR Observations for the IKAROS Spacecraft. In Proceedings of the 28th International Symposium on Space Technology and Science, Ginowan, Japan, 5 June 2011. [Google Scholar]
- Liu, Q.H. VLBI Orbit Determination Technology for Mars Exploration. J. Deep. Space Explor. 2018, 5, 435–441. [Google Scholar]
- Huang, Y.; Li, P.; Fan, M.; Cao, J.; Hu, X.; Wang, G.; Zheng, W. Orbit Determination of CE-5T1 in Earth-Moon L2 Libration Point Orbit with Ground Tracking Data. Sci. SINICA Phys. Mech. Astron. 2018, 48, 079501. [Google Scholar] [CrossRef]
- Guangli, W.A.; Xiaoyu, H.O.; Qinghui, L.I.; Bin, L.I.; Jun, M.A.; Yan, S.U.; Longfei, H.A. High Precision VLBI Orbit Measurement Technology in the Chang’E-4 Mission. J. Deep Space Explor. 2020, 7, 332–339. [Google Scholar]
- Liu, Q.; Huang, Y.; Shu, F.; Wang, G.; Zhang, J.; Chen, Z.; Li, P.; Ma, M.; Hong, X. VLBI Technique for the orbit determination of Tianwen-1. Sci. SINICA Phys. Mech. Astron. 2022, 52, 239507. [Google Scholar] [CrossRef]
- He, G.; Liu, M.; Gao, X.; Du, X.; Zhou, H.; Zhu, H. Chinese Deep Space Stations: A brief review [Antenna Applications Corner]. IEEE Antennas Propag. Mag. 2022, 64, 102–111. [Google Scholar] [CrossRef]
- Dong, G.L.; Li, G.M.; Wang, X.Y. China Deep Space Network: System Design and Key Technologies(III) Deep Space Interferometric System; Tsinghua University Press: Beijing, China, 2016; pp. 265–275. [Google Scholar]
- Guangliang, D.O.; Haitao, L.I.; Wanhong, H.A.; Hong, W.A.; Zhiyong, Z.H.; Shanbin, S.H.; Min, F.A.; Huan, Z.H.; Dezhen, X.U. Development and Future of China’s Deep Space TT&C System. J. Deep Space Explor. 2018, 5, 99–114. [Google Scholar]
- Wu, W.; Li, Z.; Li, H.; Tang, Y.; Wang, G. Status and Prospect of China’s Deep Space TT&C Network. Sci. SINICA Inf. 2020, 50, 87–108. [Google Scholar]
- Kong, J.; Zhang, Y.; Ren, T.P.; Ou, Y.Q.; Li, C.L.; Duan, J.F.; Shen, Q.H.; Chen, M. Orbit Determination Ability of Chang’E-5 Based on CDSN Tracking Data. J. Astronaut. 2022, 43, 183–188. [Google Scholar]
- The Consultative Committee for Space Data Systems. Delta-Differential One Way Ranging Operations; CCSDS Press: Washington, DC, USA, 2018; pp. 2–3. [Google Scholar]
- Border, J.S. Status of Delta-DOR Cross-Support Activities at JPL. In Proceedings of the CCSDS Fall Meeting, Hague, The Netherlands, 6–9 November 2017. [Google Scholar]
- Mercolino, M.; Border, J.S.; Madde, R.; Takeuchi, H. Delta-DOR Interoperability and Cross Support Between ESA, JPL and JAXA. In Proceedings of the 5th ESA International Workshop on Tracking, Telemetry and Command Systems for Space Applications, European Space Technology Centre (ESTEC), Noordwijk, The Netherlands, 21 September 2010. [Google Scholar]
- Mercolino, M. ESA DDOR Cross Support. In Proceedings of the CCSDS Fall Meeting, Heppenheim, Germany, 1 October 2007. [Google Scholar]
- Mercolino, M. Status of Delta-DOR Interoperability. In Proceedings of the Mattia Mercolino ESA/ESOC, San Antonio, TX, USA, 11 May 2017. [Google Scholar]
- Stein, V. Tianwen-1: China’s First Mars Mission. 2021. Available online: https://www.space.com/tianwen-1.html (accessed on 9 February 2021).
- Mercolino, M.; Maddè, R.; Iess, L.; Lanucara, M.; Tortora, P.; Ardito, A.; Rapino, G. Results and Future Applications of the ESA Delta-DOR. In Proceedings of the 4th ESA International Workshop on Tracking, Telemetry and Command Systems for Space Applications, Vancouver, BC, Canada, 19 January 2007. [Google Scholar]
- The Consultative Committee for Space Data Systems. Delta-DOR Technical Characteristics and Performance; CCSDS Press: Washington, DC, USA, 2013; Available online: http://mtc-m16c.sid.inpe.br/col/sid.inpe.br/mtc-m18/2014/02.17.19.44/doc/CCSDS%20500.1-G-1.pdf (accessed on 15 May 2022).
- Zhang, F.; Zhao, C.; Han, S.; Ma, F.; Xiang, D. GPU-Based Parallel Implementation of VLBI Correlator for Deep Space Exploration System. Remote Sens. 2021, 13, 1226. [Google Scholar] [CrossRef]
- Majid, W.; Bagri, D. In-Beam Phase Referencing with the Deep Space Network Array. In IPN Prog. Rep.; 2007; pp. 42–169. Available online: https://tda.jpl.nasa.gov/progress_report/42-169/169F.pdf (accessed on 6 May 2022).
- Han, S.T.; Ping, J.S. Deep Space Radiometric Tracking; China Machine Press: Beijing, China, 2020; pp. 20–44. [Google Scholar]
- Han, S.; Chen, L.; Wang, M.; Zhou, Z.; Sun, J.; Lu, W.; Ren, T. Monitoring Maneuver of Deep Spacecraft with Radiometric Doppler Tracking. In Proceedings of the International Conference on Signal Processing and Communication Technology, Tianjan, China, 14 April 2022. [Google Scholar]
- The Consultative Committee for Space Data Systems. Delta-DOR Raw Data Exchange Format; CCSDS Press: Washington, DC, USA, 2013; pp. 3-1–5-7. Available online: https://public.ccsds.org/Pubs/506x0m2.pdf (accessed on 1 February 2021).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Key Steps | Complex Plus | Complex Multiply |
|---|---|---|---|
| Traditional Method | Fringe Rotation | 0 | F × N |
| FFT | F × N × log2N | F × N × log2(N/2) | |
| Sub Bit Compensation | 0 | F × N | |
| Integration Time Spectrum | N × M | 0 | |
| This Paper | Spectrum Compensation | 0 | N |
| FFT | N × log2N | N × log2(N/2) | |
| Integration Time Spectrum | N × M | 0 |
| Time (Minute) | Target | Station |
|---|---|---|
| T0-T0 + 5 | Spacecraft | CEB/NNO/KSH |
| T0 + 7-T0 + 17 | Quasar | CEB/NNO/KSH |
| T0 + 19-T0 + 29 | Spacecraft | CEB/NNO/KSH |
| T0 + 31-T0 + 41 | Quasar | CEB/NNO/KSH |
| T0 + 43-T0 + 53 | Spacecraft | CEB/NNO/KSH |
| T0 + 55-T0 + 65 | Quasar | CEB/NNO/KSH |
| T0 + 67-T0 + 77 | Spacecraft | CEB/NNO/KSH |
| T0 + 79-T0 + 89 | Quasar | CEB/NNO/KSH |
| T0 + 91-T0 + 101 | Spacecraft | CEB/NNO/KSH |
| T0 + 103-T0 + 113 | Quasar | CEB/NNO/KSH |
| T0 + 115-T0 + 120 | Spacecraft | CEB/NNO/KSH |
| Station | C/N(dB) | Antenna Dish (m) |
|---|---|---|
| KSH | 45.9 | 35 |
| JMS | 47.8 | 66 |
| CEB | 47.9 | 35 |
| NNO | 42.8 | 35 |
| Baseline | Delay (ns) | Delay Rate (ps/s) |
|---|---|---|
| CEB-NNO | 0.0057 | 0.3 |
| CEB-KSH | 0.0059 | 0.3 |
| NNO-KSH | 0.0064 | 0.3 |
| Source | Time Tag | ESOC | CLTC | Difference |
|---|---|---|---|---|
| Tianwen-1 | 22:52:24.000 | −0.007204728472941 | −0.00720472849826374 | 0.0253 |
| 0054 + 161 | 23:02:25.900 | −0.006395117735975 | −0.00639511797678744 | 0.2408 |
| Tianwen-1 | 23:11:28.000 | −0.005083056289743 | −0.0050830563549182 | 0.0652 |
| Tianwen-1 | 23:16:08.000 | −0.004550230125038 | −0.0045502302195971 | 0.0946 |
| 0054 + 161 | 23:26:25.900 | −0.003660915525043 | −0.0036609153456465 | −0.1794 |
| Tianwen-1 | 23:35:28.000 | −0.002293397934561 | −0.002293397922336 | −0.0122 |
| Tianwen-1 | 23:40:08.000 | −0.001737918208119 | −0.00173791822062594 | 0.0125 |
| 0054 + 161 | 23:51:29.900 | −0.00068016381945 | −0.000680163704212356 | −0.1152 |
| Tianwen-1 | 23:59:28.000 | 0.000600139424078 | 0.000600139390881393 | 0.0332 |
| Tianwen-1 | +1T 00:04:08.000 | 0.001172134323388 | 0.00117213427254897 | 0.0508 |
| 0054 + 161 | +1T 00:14:25.900 | 0.002128779041363 | 0.00212877927140748 | −0.2300 |
| Tianwen-1 | +1T 00:23:28.000 | 0.00356557724307 | 0.00356557734894783 | −0.1059 |
| Tianwen-1 | +1T 00:28:08.000 | 0.004147765127516 | 0.0041477652051242 | −0.0776 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.; Man, H.; Wang, M.; Zhou, Z.; Cao, J.; Gao, W.; Chen, L.; Ping, J. Analysis and Demonstration of First Cross-Support Interferometry Tracking in China Mars Mission. Remote Sens. 2022, 14, 4117. https://doi.org/10.3390/rs14164117
Han S, Man H, Wang M, Zhou Z, Cao J, Gao W, Chen L, Ping J. Analysis and Demonstration of First Cross-Support Interferometry Tracking in China Mars Mission. Remote Sensing. 2022; 14(16):4117. https://doi.org/10.3390/rs14164117
Chicago/Turabian StyleHan, Songtao, Haijun Man, Mei Wang, Zhijin Zhou, Jianfeng Cao, Wei Gao, Lue Chen, and Jinsong Ping. 2022. "Analysis and Demonstration of First Cross-Support Interferometry Tracking in China Mars Mission" Remote Sensing 14, no. 16: 4117. https://doi.org/10.3390/rs14164117