
Multi-Circular SAR Three-Dimensional Image Formation via Group Sparsity in Adjacent Sub-Apertures


Abstract
:1. Introduction
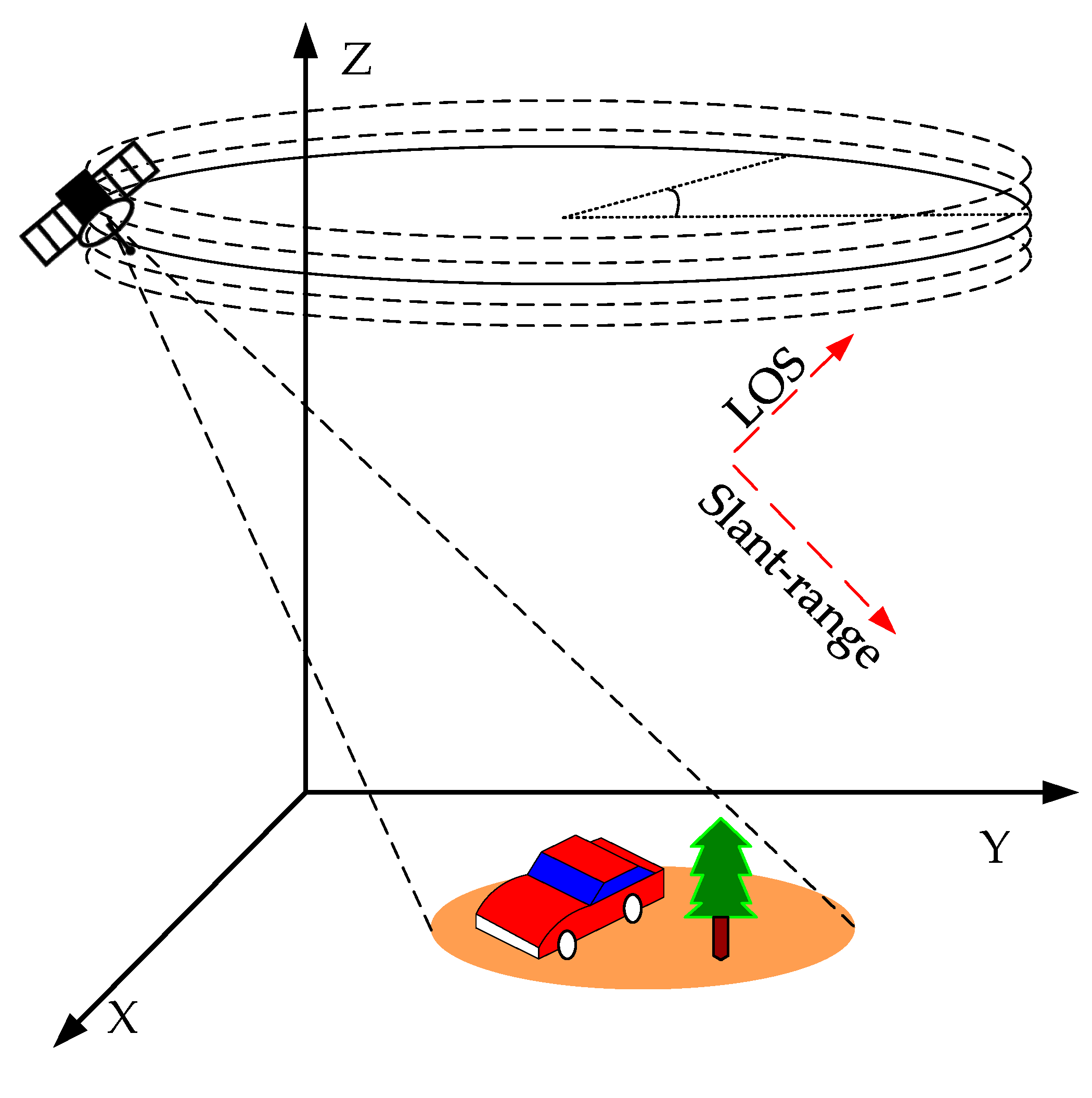
2. The Observation Model in Elevation of MCSAR Sub-Aperture Image Stack
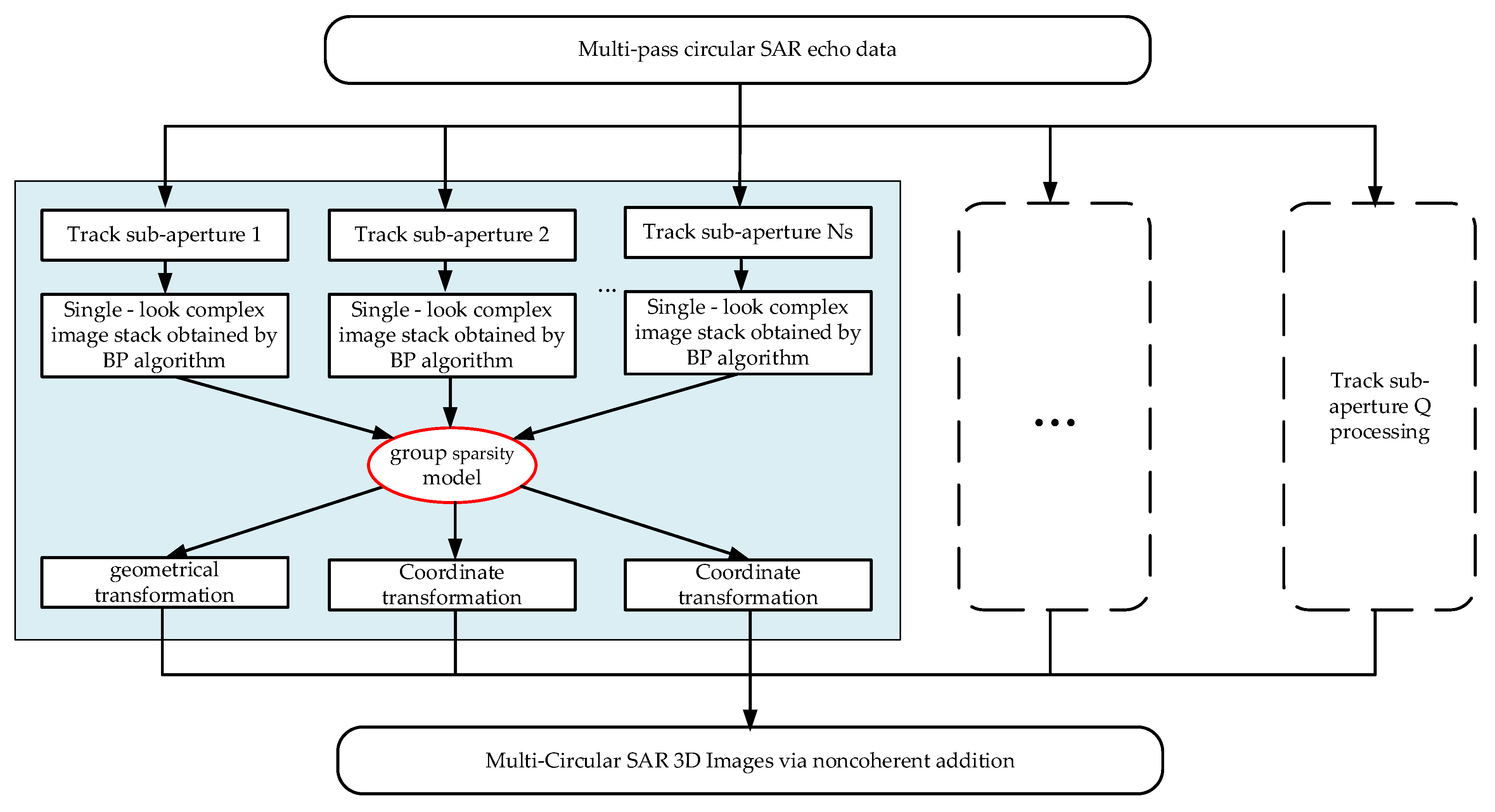
3. The Solution Method of Group Sparse Constraint between Adjacent Sub-Apertures
3.1. L1-Norm Constraint Problem
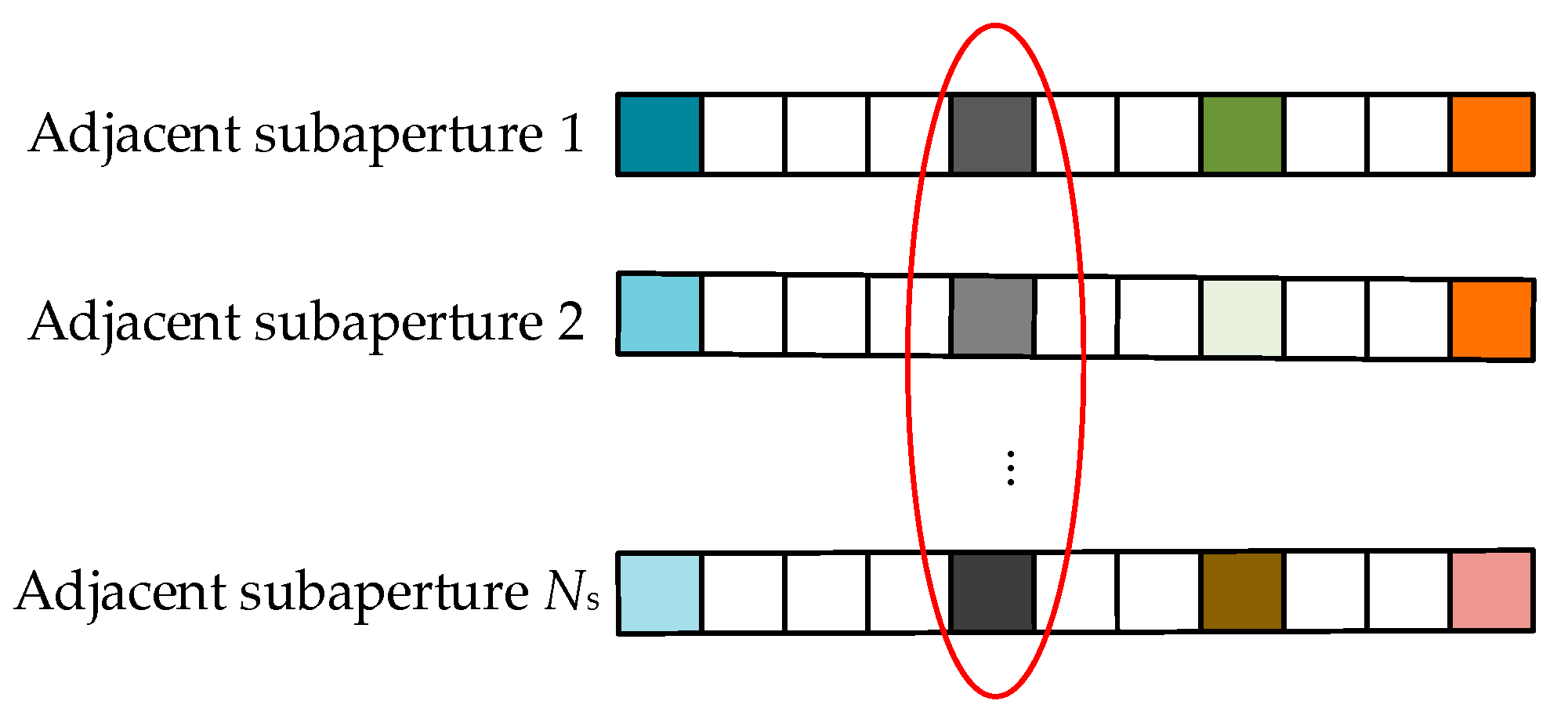
3.2. The Group Sparsity between Adjacent Sub-Apertures
3.3. Sparse Group Thresholding Iterative Solving
3.4. Computational Complexity Analysis
4. Experimental Analysis
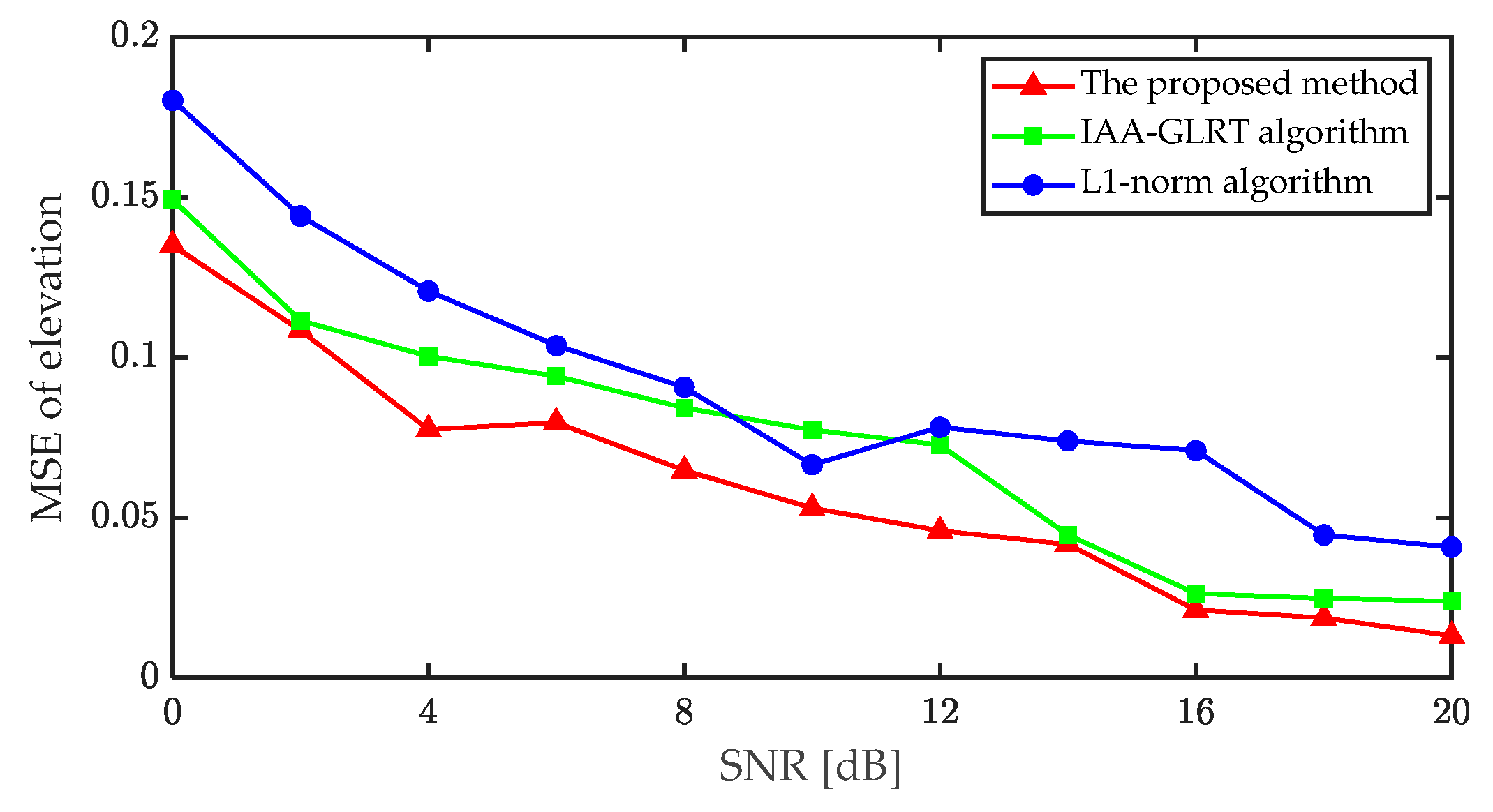
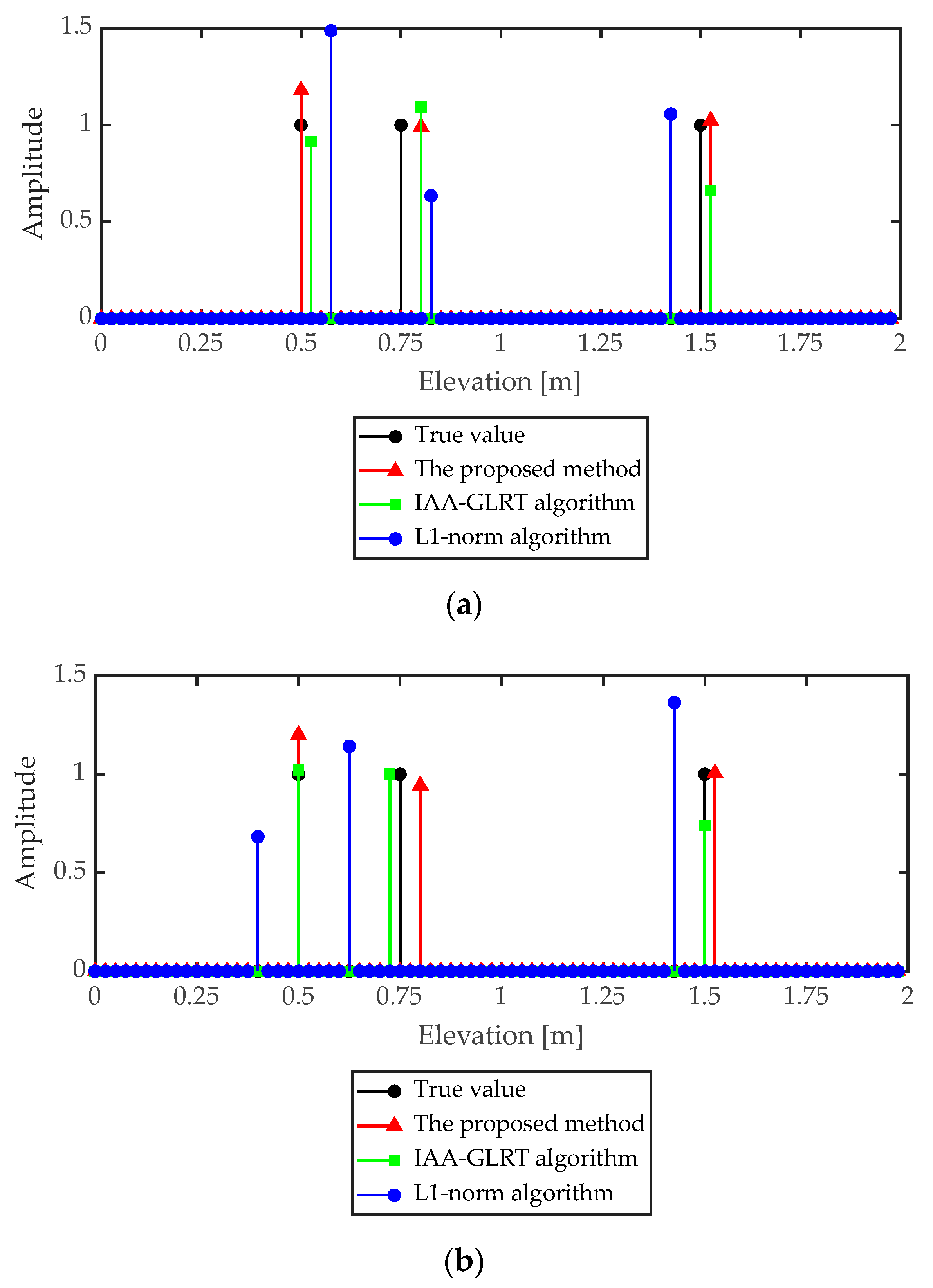
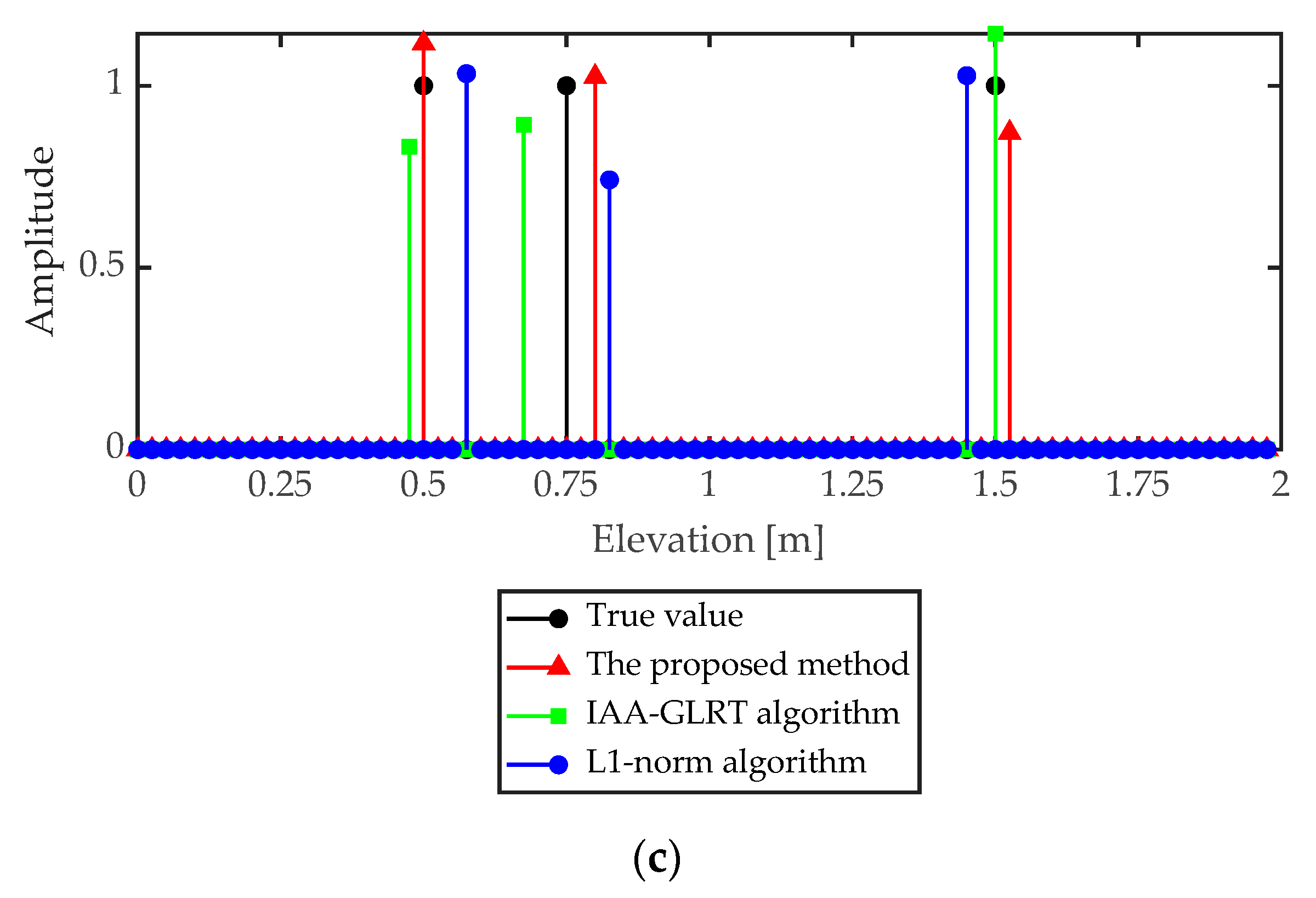
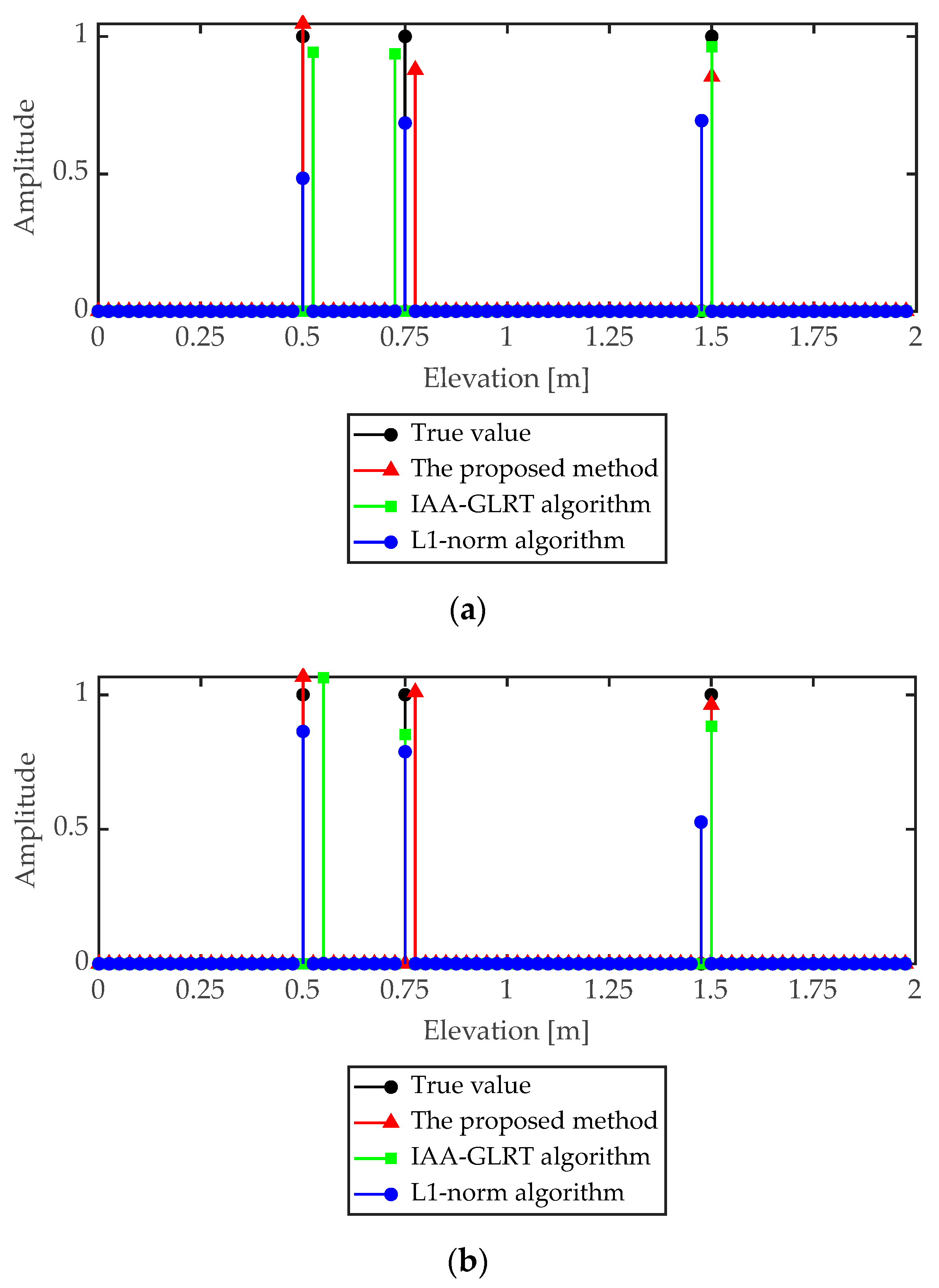
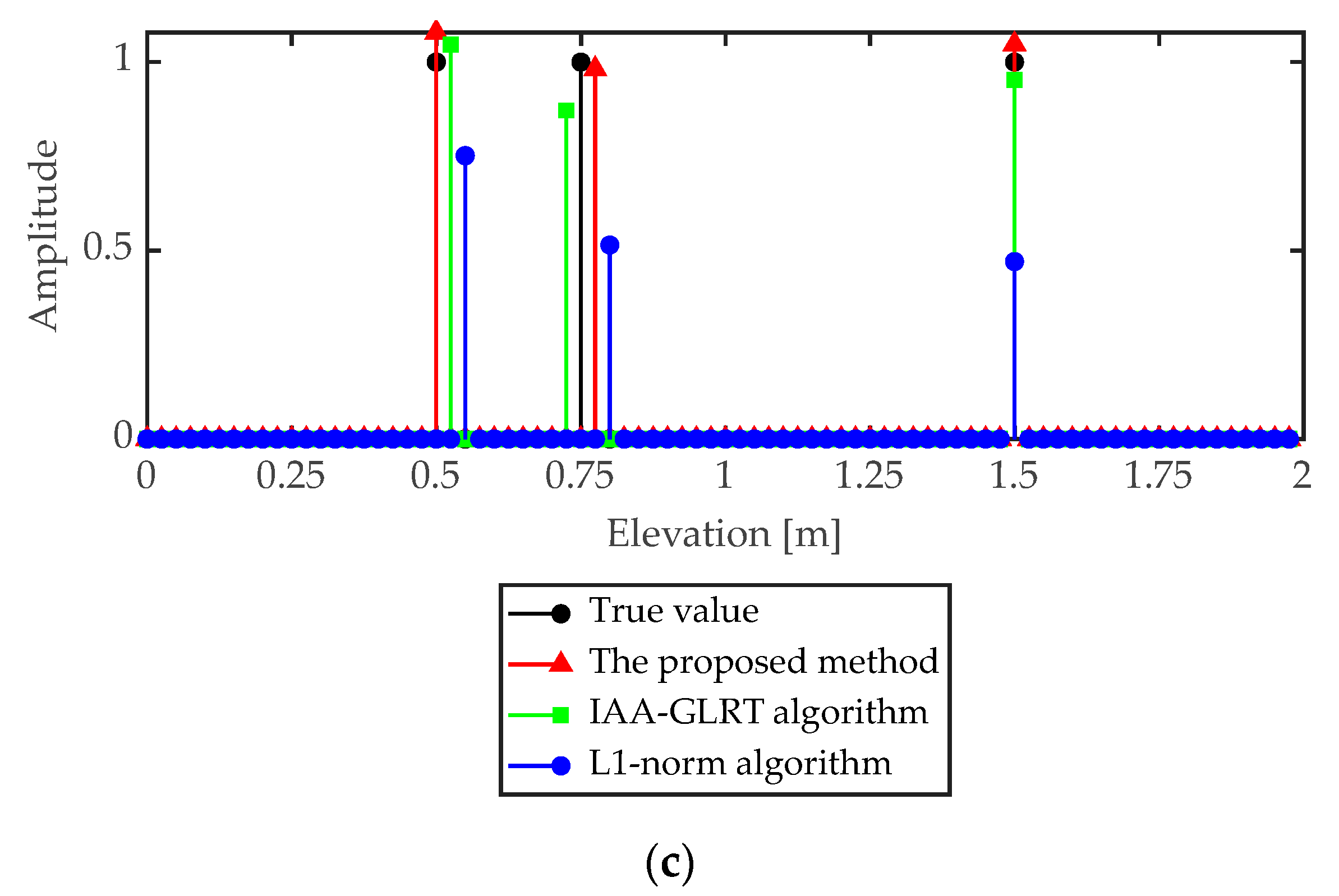
4.1. Simulation Data Analysis
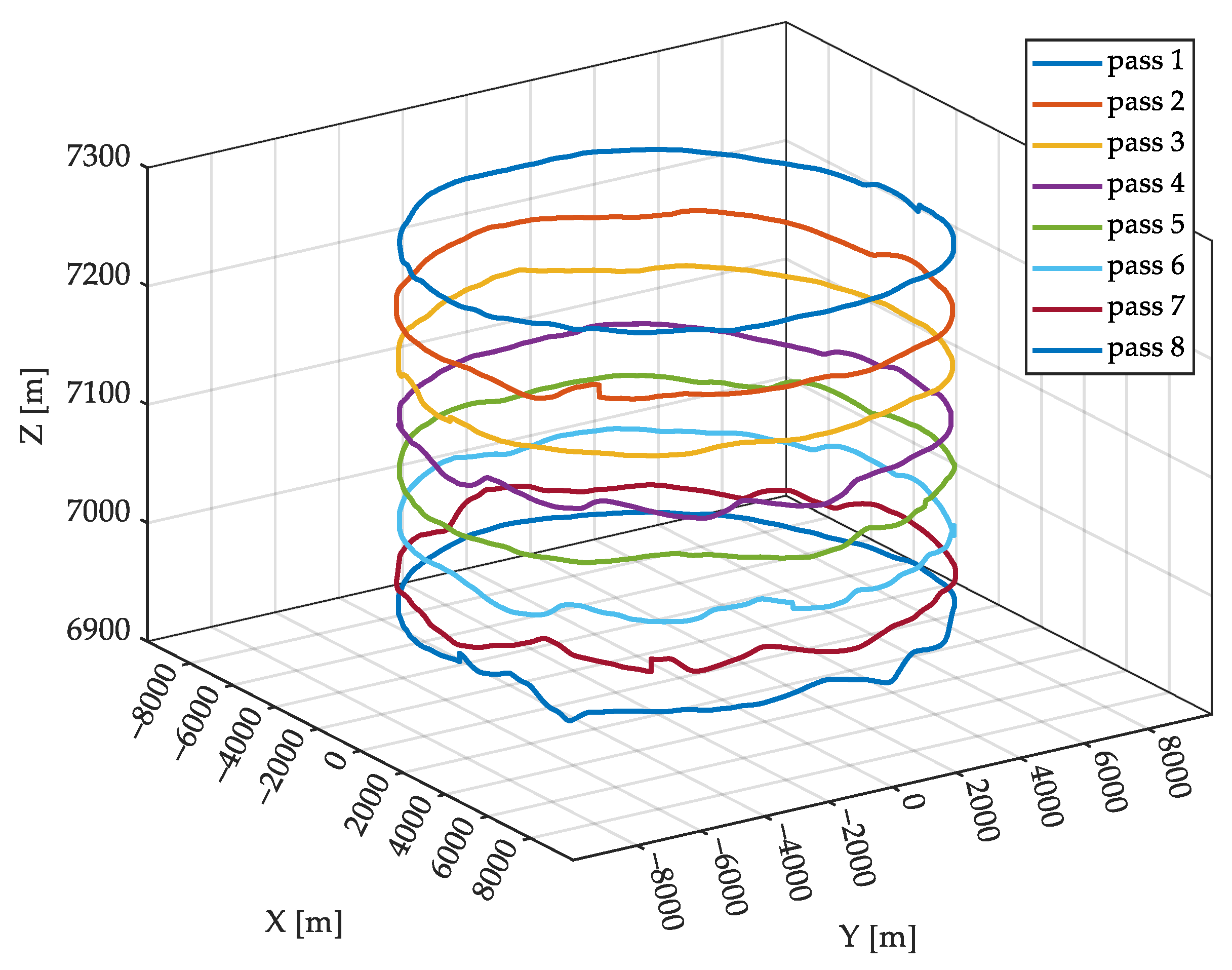
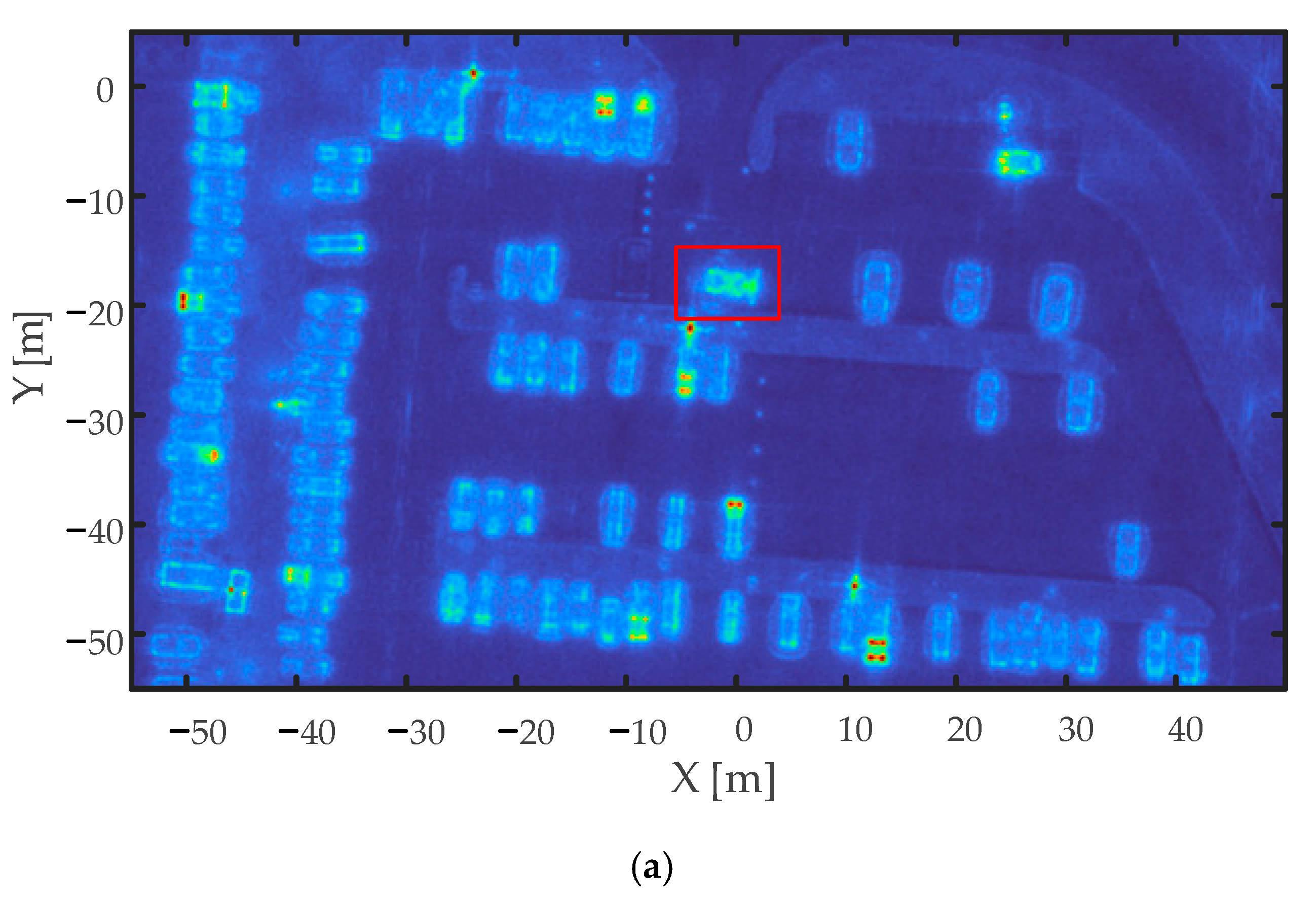
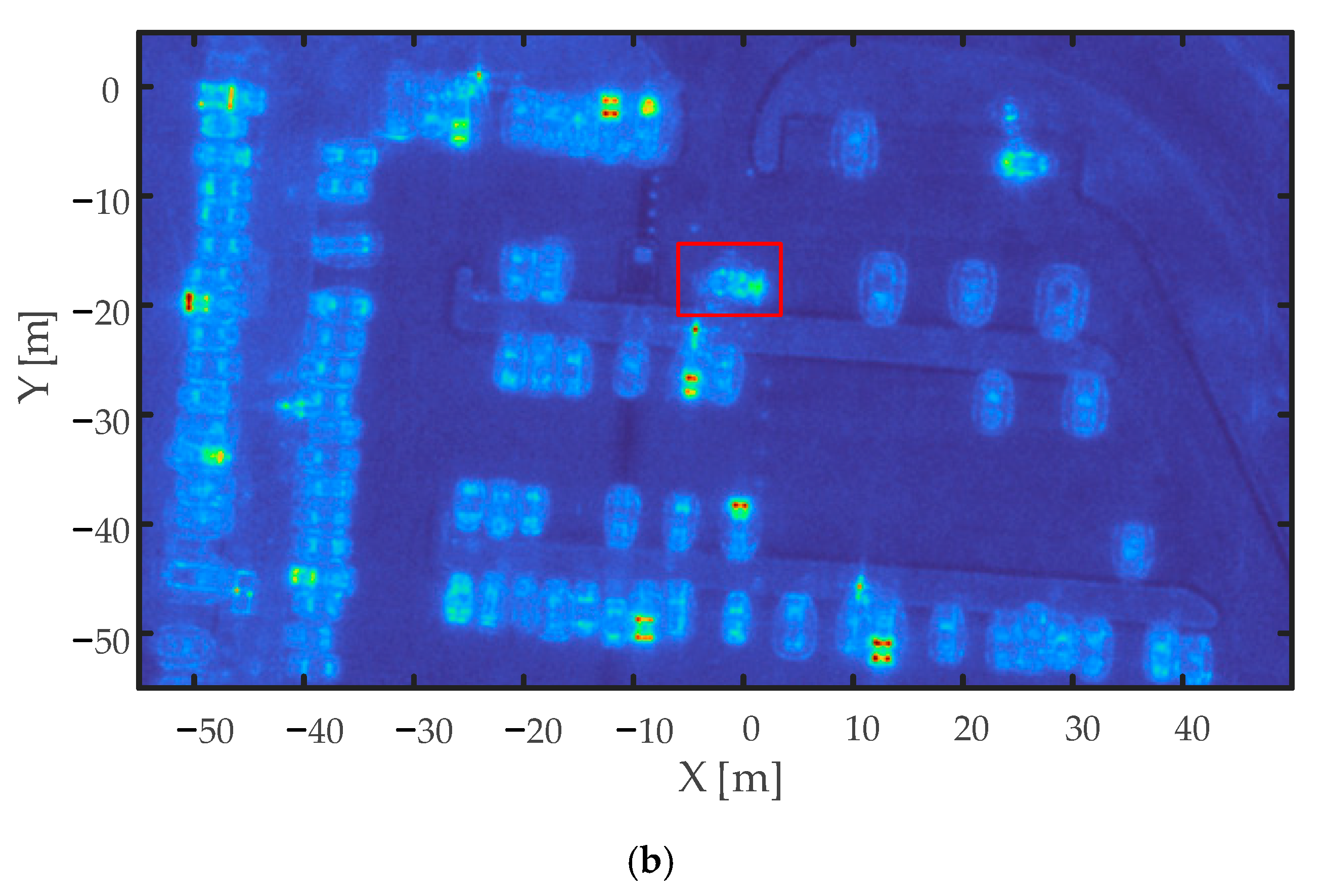
4.2. MCSAR Data Analysis
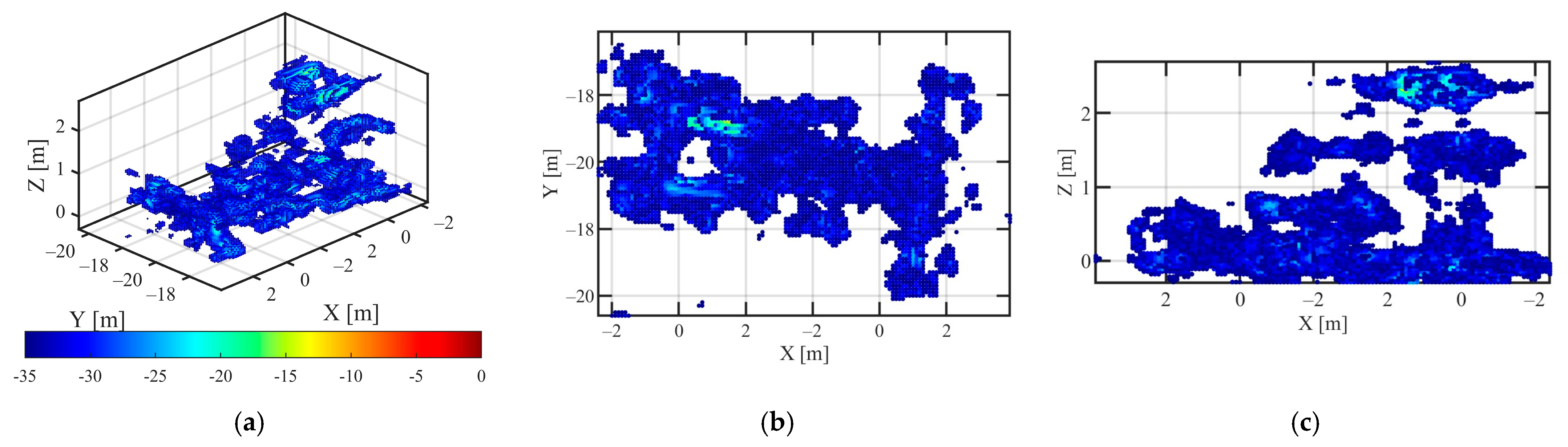
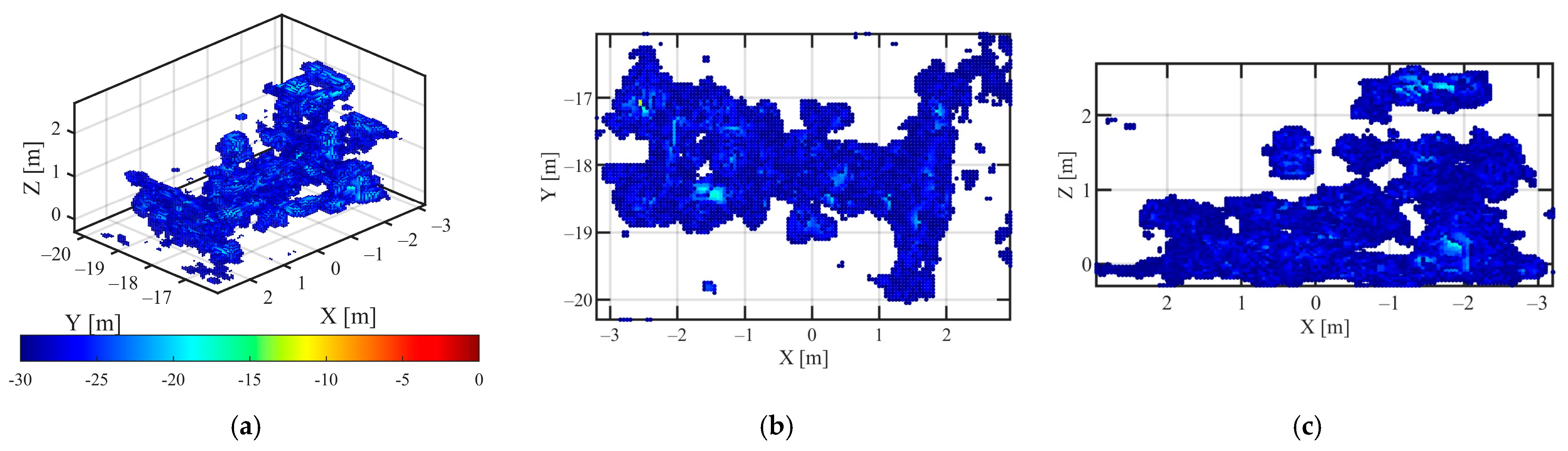
4.2.1. Select the Tractor C1 Region, and Use the Proposed Method to Reconstruct the 3D Target Image
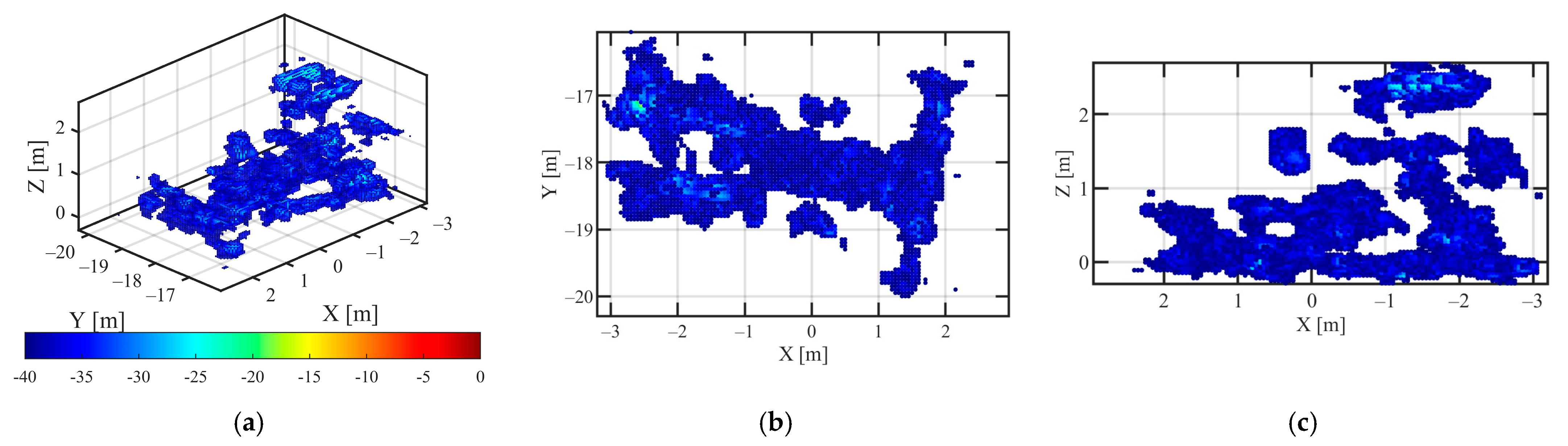
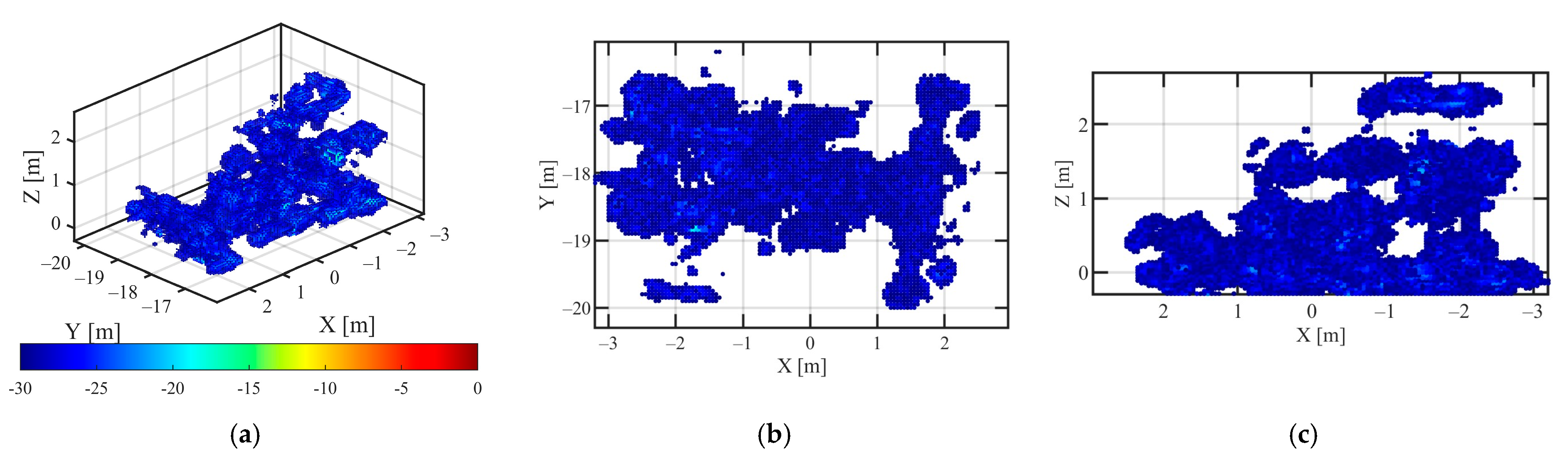
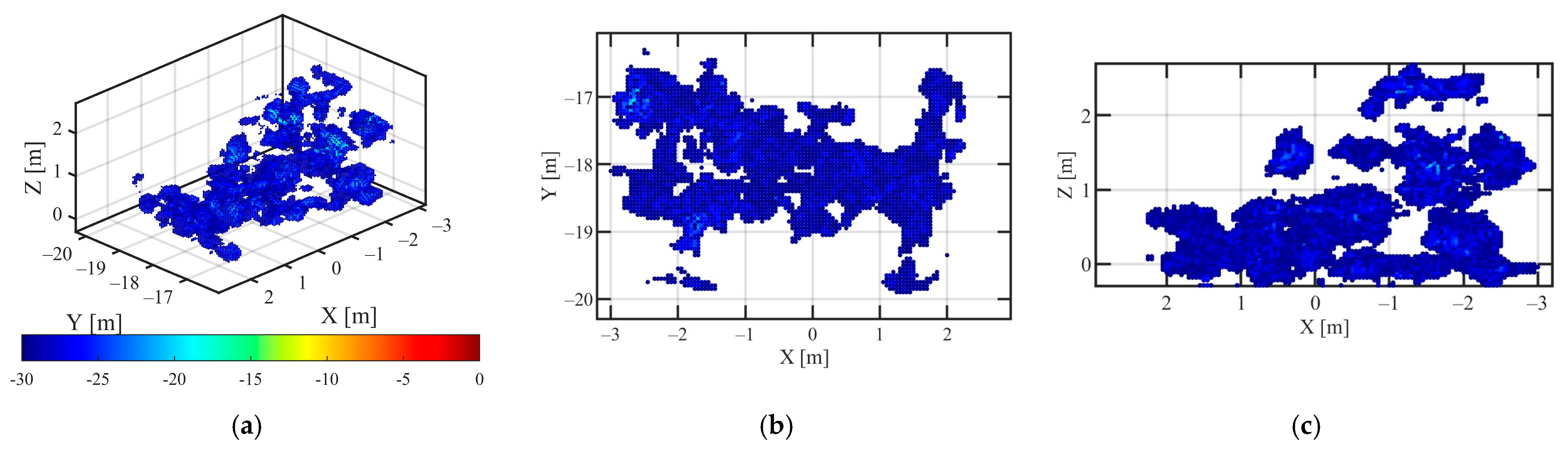
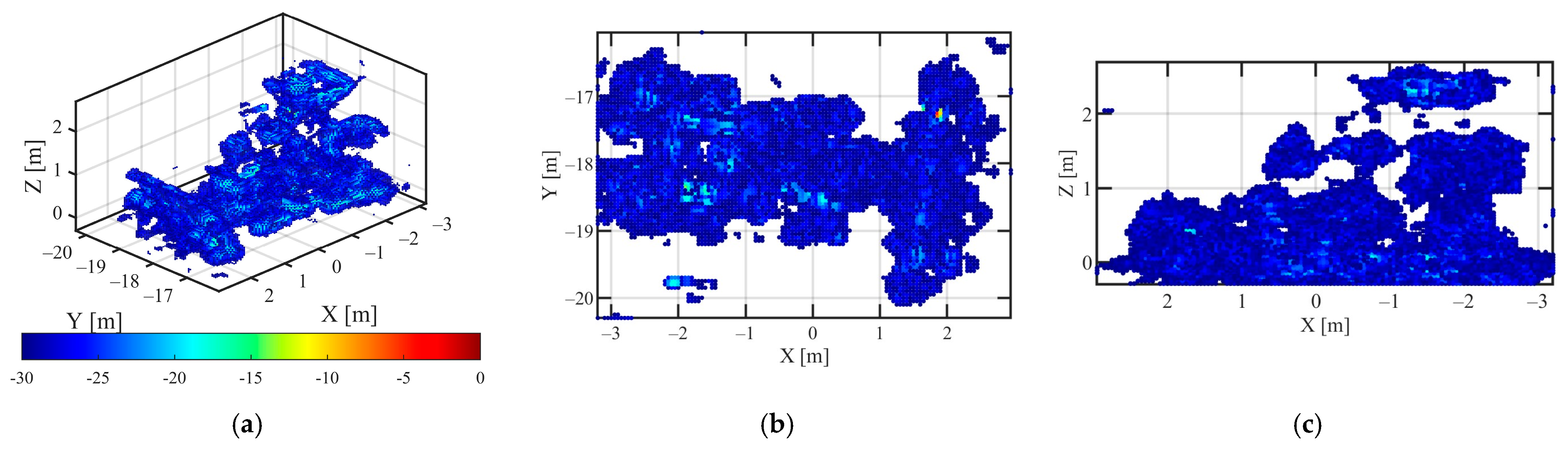
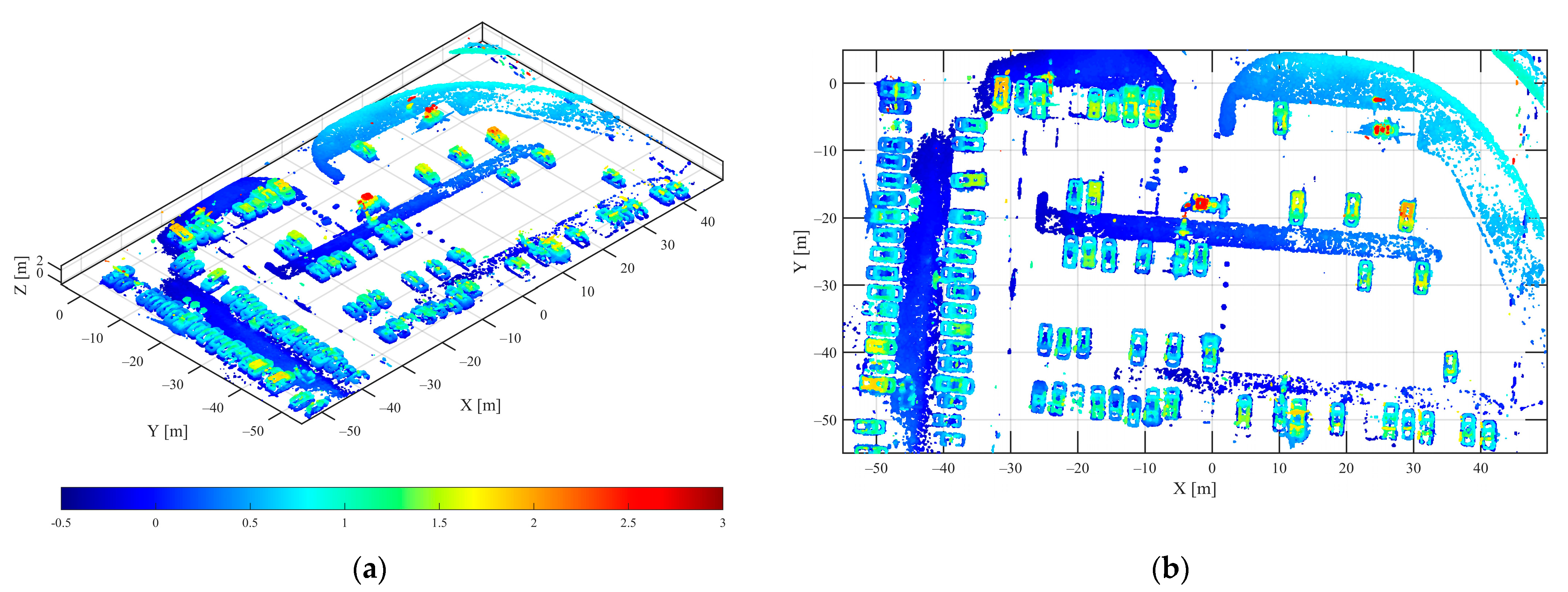
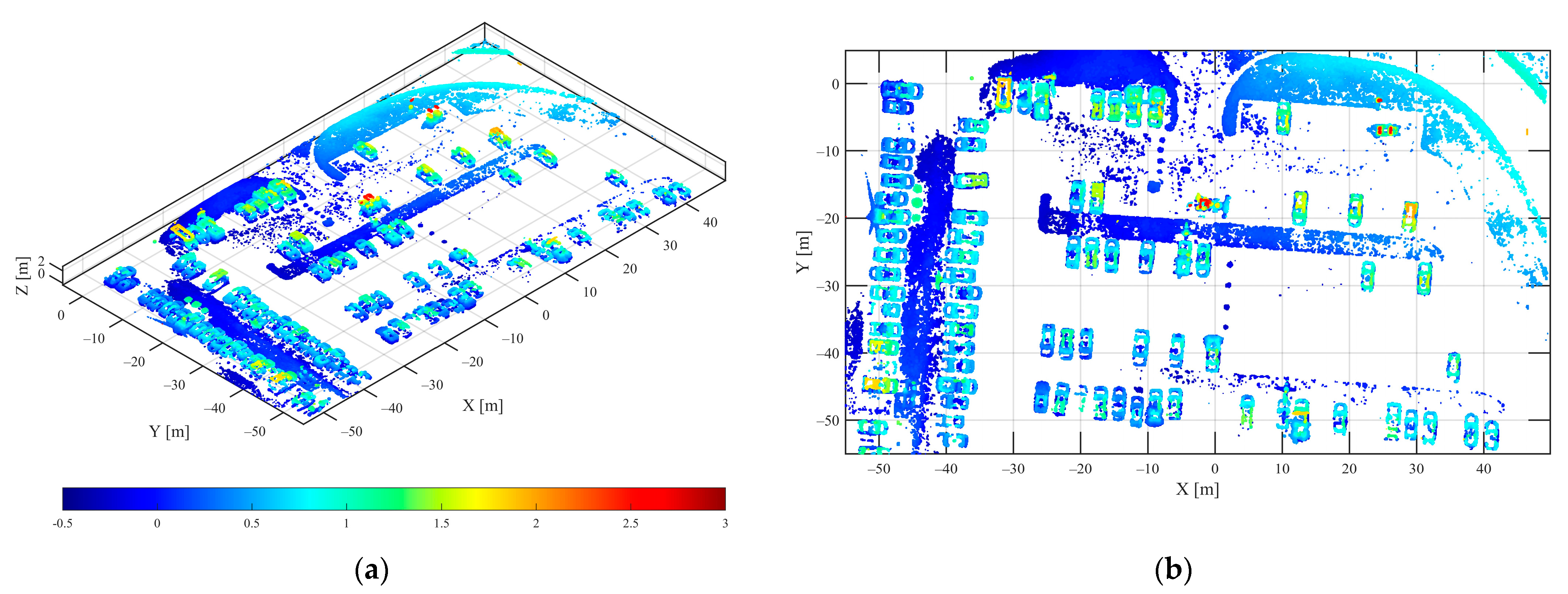
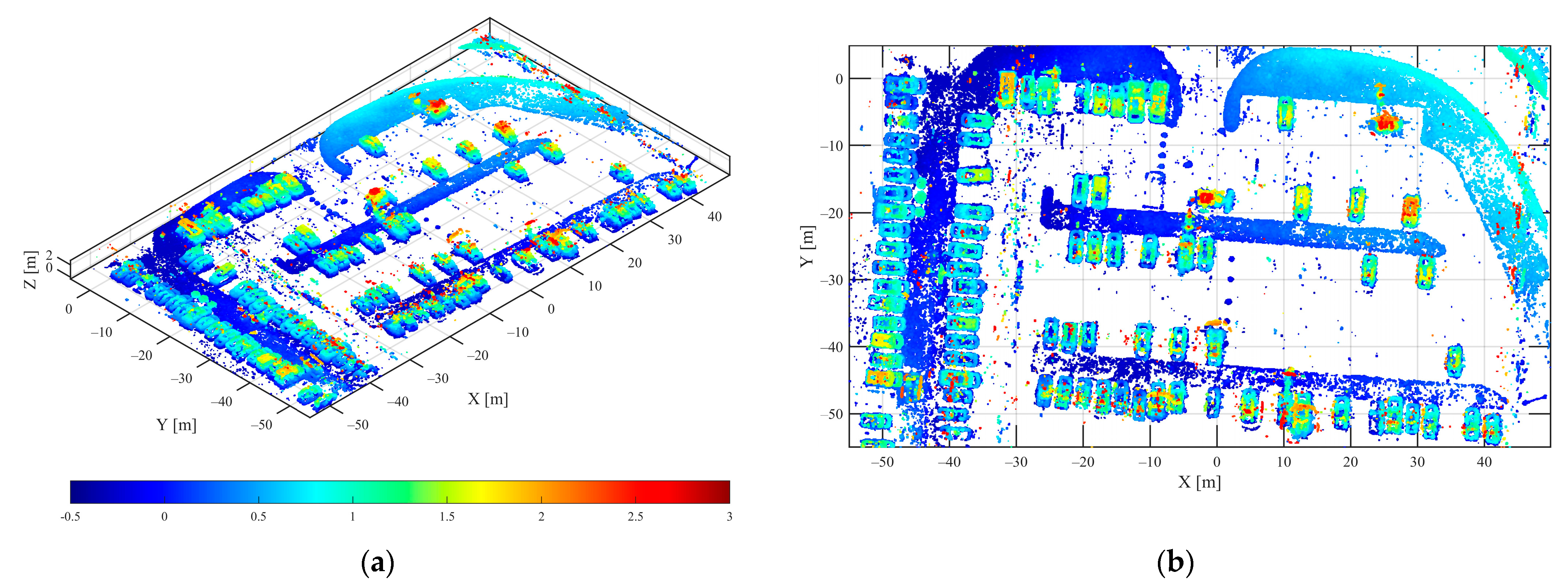
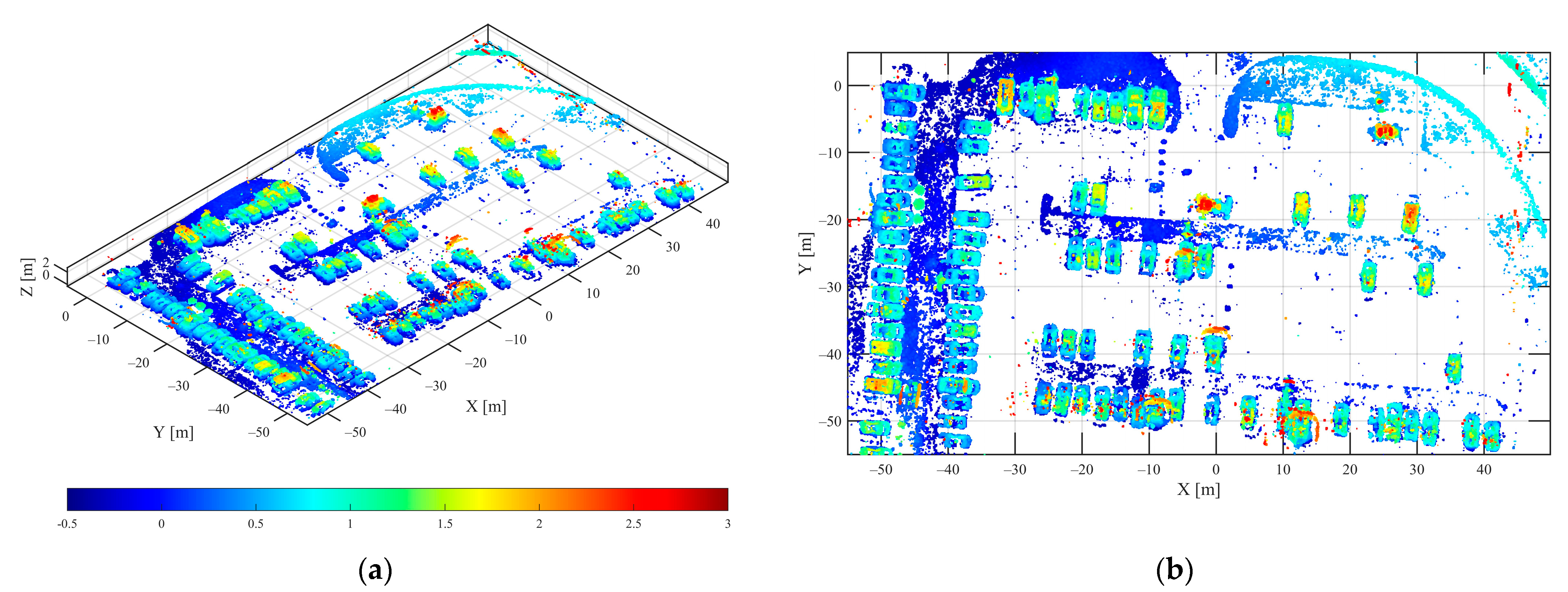
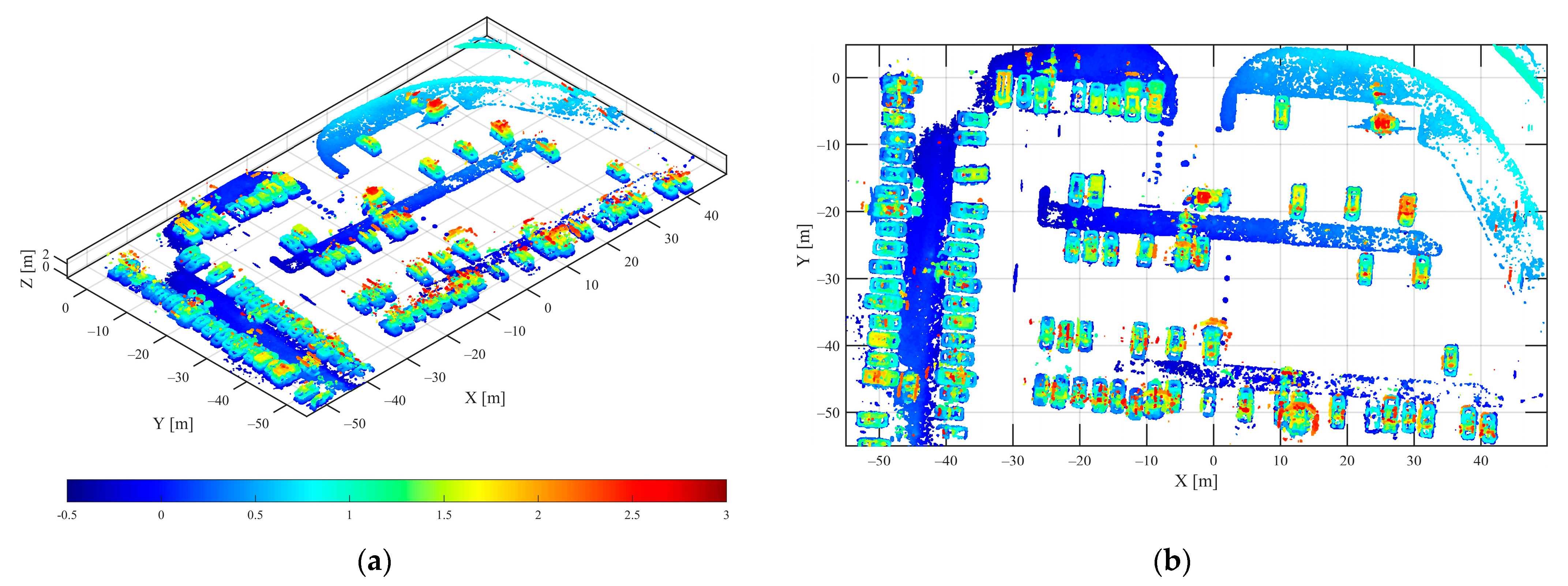
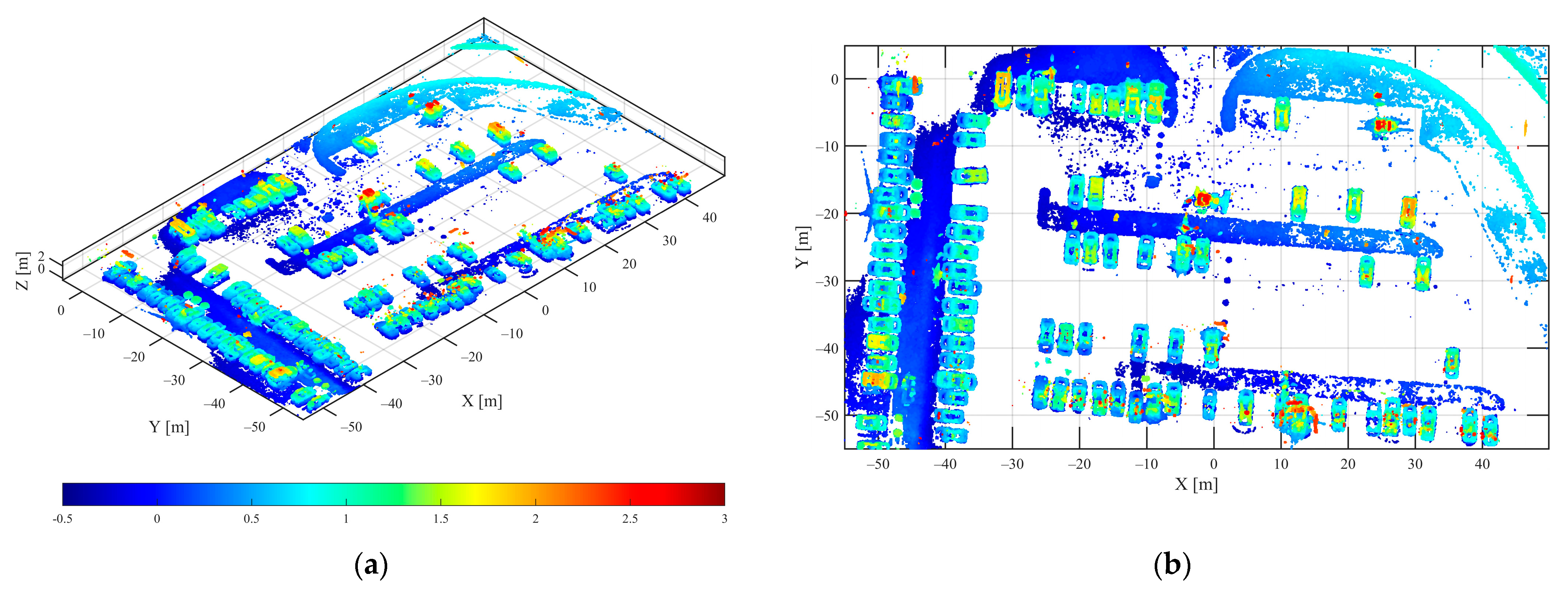
4.2.2. Select the Area of 105 m × 60 m in the Parking Lot, and Use the Proposed Method to Reconstruct the Civil Vehicles 3D Image
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ponce, O.; Prats-Iraola, P.; Scheiber, R.; Reigber, A.; Moreira, A.; Aguilera, E. Polarimetric 3-D Reconstruction from Multicircular SAR at P-Band. IEEE Geosci. Remote Sens. Lett. 2014, 11, 803–807. [Google Scholar] [CrossRef]
- Zelnio, E.G.; Ferrara, M.; Garber, F.D.; Jackson, J.A.; Austin, C. Enhancement of multi-pass 3D circular SAR images using sparse reconstruction techniques. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XVI, Orlando, FL, USA, 16–17 April 2009. [Google Scholar]
- Ponce, O.; Prats, P.; Scheiber, R.; Reigber, A.; Moreira, A. Study of the 3-D Impulse Response Function of Holographic SAR Tomography with Multicircular Acquisitions. In Proceedings of the EUSAR 2014, 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Moses, R.L.; Potter, L.C. Noncoherent 2D and 3D SAR reconstruction from wide-angle measurements. In Proceedings of the 13th Annual Adaptive Sensor Array Processing Workshop, Lexington, MA, USA, 7–8 June 2005. [Google Scholar]
- Reigber, A.; Moreira, A. First demonstration of airborne SAR tomography using multibaseline L-band data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- Zelnio, E.G.; Ertin, E.; Garber, F.D.; Moses, R.L.; Potter, L.C. Multibaseline IFSAR for 3D target reconstruction. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XV, Orlando, FL, USA, 17–18 March 2008. [Google Scholar]
- Ponce, O.; Prats-Iraola, P.; Scheiber, R.; Reigber, A.; Moreira, A. First Airborne Demonstration of Holographic SAR Tomography with Fully Polarimetric Multicircular Acquisitions at L-Band. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6170–6196. [Google Scholar] [CrossRef]
- Feng, D.; An, D.; Chen, L.; Huang, X. Holographic SAR Tomography 3-D Reconstruction Based on Iterative Adaptive Approach and Generalized Likelihood Ratio Test. IEEE Trans. Geosci. Remote Sens. 2021, 59, 305–315. [Google Scholar] [CrossRef]
- Sugavanam, N.; Ertin, E. Models of anisotropic scattering for 3D SAR reconstruction. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar]
- Ash, J.; Ertin, E.; Potter, L.C.; Zelnio, E. Wide-Angle Synthetic Aperture Radar Imaging: Models and algorithms for anisotropic scattering. IEEE Signal Process. Mag. 2014, 31, 16–26. [Google Scholar] [CrossRef]
- Çetin, M.; Stojanović, I.; Önhon, N.Ö.; Varshney, K.; Samadi, S.; Karl, W.C.; Willsky, A.S. Sparsity-Driven Synthetic Aperture Radar Imaging: Reconstruction, autofocusing, moving targets, and compressed sensing. IEEE Signal Process. Mag. 2014, 31, 27–40. [Google Scholar] [CrossRef]
- Stojanovic, I.; Cetin, M.; Karl, W. Joint space aspect reconstruction of wide-angle SAR exploiting sparsity. In Proceedings of the SPIE—The International Society for Optical Engineering; International Society for Optical Engineering, Bellingham, WA, USA, 16–20 March 2008. [Google Scholar] [CrossRef]
- Duarte, M.F.; Eldar, Y.C. Structured Compressed Sensing: From Theory to Applications. IEEE Trans. Signal Process. 2011, 59, 4053–4085. [Google Scholar] [CrossRef]
- Aguilera, E.; Nannini, M.; Reigber, A. Multisignal Compressed Sensing for Polarimetric SAR Tomography. IEEE Geosci. Remote Sens. Lett. 2012, 9, 871–875. [Google Scholar] [CrossRef]
- Austin, C.D.; Ertin, E.; Moses, R.L. Sparse Signal Methods for 3-D Radar Imaging. IEEE J. Sel. Top. Signal Process. 2011, 5, 408–423. [Google Scholar] [CrossRef]
- Ertin, E.; Moses, R.L.; Potter, L.C. Interferometric methods for three-dimensional target reconstruction with multipass circular SAR. IET Radar Sonar Navig. 2010, 4, 464–473. [Google Scholar] [CrossRef]
- Zelnio, E.G.; Austin, C.D.; Garber, F.D.; Ertin, E.; Moses, R.L. Sparse multipass 3D SAR imaging: Applications to the GOTCHA data set. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XVI, Orlando, FL, USA, 16–17 April 2009. [Google Scholar]
- Candes, E.J.; Wakin, M.B. An Introduction to Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Daubechies, I.; Defrise, M.; De Mol, C. An iterative thresholding algorithm for linear inverse problems with a sparsity constraint. Commun. Pure Appl. Math. 2004, 57, 1413–1457. [Google Scholar] [CrossRef]
- Dudgeon, D.; Lacoss, R.; Lazott, C.; Verly, J. Use of persistent scatterers for model-based recognition. In Proceedings of the SPIE—The International Society for Optical Engineering; International Society for Optical Engineering, Bellingham, WA, USA, 4–8 April 1994. [Google Scholar] [CrossRef]
- Cai, T.T.; Zhang, A.R.; Zhou, Y. Sparse Group Lasso: Optimal Sample Complexity, Convergence Rate, and Statistical Inference. IEEE Trans. Inf. Theory 2022. [Google Scholar] [CrossRef]
- Sprechmann, P.; Ramirez, I.; Sapiro, G.; Eldar, Y.C. C-HiLasso: A Collaborative Hierarchical Sparse Modeling Framework. IEEE Trans. Signal Process. 2011, 59, 4183–4198. [Google Scholar] [CrossRef]
- Ertin, E.; Austin, C.D.; Sharma, S.; Moses, R.L.; Potter, L.C. GOTCHA experience report: Three-dimensional SAR imaging with complete circular apertures. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XIV, Orlando, FL, USA, 10–11 April 2008; pp. 9–20. [Google Scholar]
- Zelnio, E.G.; Casteel, J.C.H.; Garber, F.D.; Gorham, L.A.; Minardi, M.J.; Scarborough, S.M.; Naidu, K.D.; Majumder, U.K. A challenge problem for 2D/3D imaging of targets from a volumetric data set in an urban environment. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XIV, Orlando, FL, USA, 10–11 April 2008. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Value |
|---|---|
| Carrier frequency | 10 GHz |
| Slant range | 10 Km |
| Height of three scattering points | 0.5 m, 0.75 m, 1.5 m |
| Sub-aperture 1 baseline | 44.23°, 44.55°, 44.83°, 45.00°, 45.07°, 45.32°, 45.67°, 45.88° |
| Sub-aperture 2 baseline | 44.25°, 44.40°, 44.67°, 44.94°, 45.22°, 45.58°, 45.77°, 45.93° |
| Sub-aperture 3 baseline | 44.31°, 44.41°, 44.64°, 44.78°, 45.27°, 45.55°, 45.77°, 45.90° |
| 3D Image Entropy | |||
|---|---|---|---|
| HH Polarization | VV Polarization | ||
| The Vehicle C1 | the proposed method | 6.4892 | 6.9249 |
| L1 norm regularization method | 9.7205 | 10.3100 | |
| IAA-GLRT method | 8.4361 | 8.6431 | |
| The parking lot | the proposed method | 9.1888 | 11.0834 |
| L1 norm regularization method | 11.9414 | 13.0783 | |
| IAA-GLRT method | 11.6522 | 12.8253 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Zhu, D. Multi-Circular SAR Three-Dimensional Image Formation via Group Sparsity in Adjacent Sub-Apertures. Remote Sens. 2022, 14, 3945. https://doi.org/10.3390/rs14163945
Yang W, Zhu D. Multi-Circular SAR Three-Dimensional Image Formation via Group Sparsity in Adjacent Sub-Apertures. Remote Sensing. 2022; 14(16):3945. https://doi.org/10.3390/rs14163945
Chicago/Turabian StyleYang, Weixing, and Daiyin Zhu. 2022. "Multi-Circular SAR Three-Dimensional Image Formation via Group Sparsity in Adjacent Sub-Apertures" Remote Sensing 14, no. 16: 3945. https://doi.org/10.3390/rs14163945