2.1. System Configuration and Working Principle
The typical HBR system for maritime target detection is shown in
Figure 1. The system uses the electromagnetic radiation signal of a non-cooperative radar emitter such as shore-based radar, shipborne radar, or airborne radar. The receiver adopts a multi-channel receiver, including reference channel and surveillance channel receiver. The reference channel receiver receives the direct wave from the non-cooperative radar radiation source, and the surveillance channel receiver receives the scattered echo from the maritime target. Using the direct wave as the reference signal, the weak scattering signal of the surveillance channel can be detected by using the passive coherent detection technology.
The structure of the HBR system is basically similar to that of monostatic radar, but there are still many significant differences. The control of the antenna scanning position is based on the direct wave reference signal. Similarly, the LO (local oscillator) frequency and sampling are controlled by reference synchronization. In addition, the reference waveform that is used by the signal processor for pulse compression processing of echo signal is also from the direct wave reference signal. If the direct wave pulse is mixed with the target echo in the time domain, the direct wave interference suppression is very necessary, otherwise the dynamic range of the receiver is difficult to meet the normal reception of direct wave and target echo at the same time. However, due to the time-domain separation characteristics of pulse signals, the direct wave interference problem is not as serious as that of passive radar based on radio and television signals. Under certain conditions, the interference problem of strong direct wave in target echo can be avoided.
Under the condition of non-cooperative detection, the receiver needs to complete the synchronization independently [
19,
20]. When the transmitter and the receiver have a direct view, and the side lobe level of the transmitting antenna is high and 360 degree azimuth scanning, the bistatic radar receiver can use an auxiliary reference receiving channel to intercept the direct wave signal of the transmitter and extract the synchronization information [
21]. The HBR antenna adopts a multi-beam array antenna. The signal processor carries out direct wave reference signal reconstruction, pulse compression, space-time-frequency synchronization processing, bistatic MTI (moving target indication)/MTD (moving target detection)/clutter map processing, and adaptive CFAR detection on the output signal of the receiver. Finally, the detection results are sent to the data processor for tracking, display, and recording.
2.2. Geometrical Relationship and Performance Analysis
The geometrical relationship of the HBR system is shown in
Figure 2.
is the transmitting station of the non-cooperative radar emitter,
is the receiving station, and
is the maritime target. The distance from
to
is the baseline distance
.
and
are the target azimuth of the transmitting station and the receiving station, respectively.
and
are the distance from the target to the transmitting station and the receiving station, respectively. The bistatic distance difference is
.
Generally, the target and the receiver are not covered by the main lobe of the transmitter antenna at the same time, and the direct wave often comes from the side lobe radiation of the transmitter. Therefore, the interception of the direct wave from the non-cooperative radar emitter by the reference receiver is the side lobe interception in most cases. The side lobe level of the radar antenna is generally 20~50 dB lower than the peak value of the main lobe, so the direct wave power of side lobe interception at the receiving station
can be calculated as follows:
According to the bistatic radar equation, the target echo power at the receiving station
can be calculated as follows:
where
is the peak power of the transmitter,
is the antenna gain of the transmitter,
is the antenna gain of the receiver,
is the radar wavelength,
is the antenna gain of sidelobe,
is the transmission loss,
is the reception loss,
is the bistatic radar cross section of the target,
is the baseline distance,
, and
is the distance from the target to the transmitting station and the receiving station respectively.
Next, use a common navigation radar as the non-cooperative radar emitter to simply analyze and evaluate the system performance. The typical working parameters of the system are shown in
Table 1.
Based on the above equation and the typical system working parameters, it can be roughly estimated that the range of direct wave power of the reference channel is about −70~−10 dBm, and the range of the echo signal power of surveillance channel is about −120~−90 dBm. The power difference between the direct wave and target echo is very great. In fact, the value
and
will be limited by the geometrical relationship of the bistatic radar. Therefore, the distribution of target echo power on the bistatic plane under different baseline distances can be investigated, as shown in
Figure 3.
Figure 3a,b correspond to the contour of target echo power when the baseline distance is 20 km and 40 km, respectively. The unit of value of the target echo power in
Figure 3 is dBm.
In order to investigate the receiver’s ability to receive direct wave and target echo, it is necessary to estimate the receiver sensitivity. The receiver sensitivity
is defined as follows:
where
is the Boltzmann constant,
is the reference temperature,
is the noise bandwidth of the receiver,
is the noise figure of the receiver,
is the detection factor, and it’s the minimum signal-to-noise ratio required for detection.
According to the typical working parameters of the receiver, the receiver sensitivity can be estimated to be about −100 dBm. It can be seen that the receiver with this sensitivity can meet the reception of direct wave, but can not meet the reception of target echo in all ranges. Therefore, it is necessary to design a high-sensitivity receiver. Three aspects can be considered to improve the sensitivity: (1) reduce the noise figure of the receiver , which has limited potential; (2) the heterodyne receiver is used to reduce the signal bandwidth ; and (3) reduce the signal-to-noise ratio that is required for detection, and adopt digital signal processing technology to improve the processing gain and reduce the detection factor .
2.3. Target Location Method
Under certain synchronization conditions, four important parameters of bistatic triangular positioning can be obtained, such as the baseline distance , the bistatic distance difference , target azimuth of transmitting station , and the target azimuth of the receiving station . However, the measurement of these parameters is affected by the platform position of the radiation source, the scanning mode, and the antenna configuration of the receiver. For the above four bistatic measurement parameters, the target can be located by only knowing any three parameters of them. Using different combinations of observation and measurement, there can be the following four target positioning methods:
Method 1 (known
,
, and
):
Method 2 (known
,
, and
):
Method 3 (known
,
, and
):
Method 4 (known
,
, and
):
The above four methods are feasible. In the actual system, the selection of specific method depends on which parameters can be measured. According to the possible measurement parameters, there are three situations: (1) When the radiation source is non-fixed speed scanning, fan scanning, or electronic scanning, only three parameters, such as , , and can be obtained. Thus, only Method 1 can be used. (2) When the radiation source is in 360 degree azimuth scanning mode and the receiving station adopts omnidirectional antenna, only three parameters, such as , , and can be obtained. Thus, only Method 2 can be used. (3) When the radiation source is in the 360 degree azimuth scanning mode and the receiving station adopts directional antenna or array antenna, four parameters, such as , , , and can be obtained at the same time by using the previous parameter measurement method. Since only any three of the four parameters can locate the target, there is information redundancy. Therefore, the above four positioning methods can be used to achieve positioning optimization. According to the different spatial distribution of the accuracy of each positioning method, the method with the highest accuracy can be selected for calculation, so as to obtain better positioning performance.
In practice, for the non-cooperative radar emitter with 360 degree azimuth scanning, in order to simplify the system design, two simple omni-directional antennas or directional horn antennas can be used to process the direct wave and target scattering signal from the non-cooperative transmitting station to realize the positioning of the target. The target location method of the HBR system is shown in
Figure 4.
In
Figure 4, the target azimuth of the transmitting station
can be calculated by measuring the time interval
between the main beam of the radar emitter scanning the receiver and the target and the total time
of one circle scanning of the radar emitter, then the calculation equation is
. The bistatic range difference
of the target can be calculated by measuring the time difference
between the direct wave and the target scattering echo, then the calculation equation is
. When the transmitting station is located on a fixed platform and the location is known, the baseline distance
can be determined by measuring the respective geographical coordinates of the transmitting station and the receiving station. When the transmitting station is located on the moving platform or the position is unknown, and the mechanical 360 degree azimuth scanning mode is adopted, the receiver can adopt two omni-directional antennas with a distance of
. The baseline distance
can be determined by measuring the time difference
between the radar emitter signal reaching the two antennas, the scanning speed of the radar emitter antenna
, and the azimuth of the incident signal of the radar emitter
, then the calculation equation is
.
In this way, with the target azimuth of the transmitting station , baseline distance , and bistatic distance difference between the transmitting station and the target, the azimuth and distance from the target to the receiving station can be calculated by using the above Method 2 and Equation (5), so as to determine the position of the target relative to the receiver.
2.4. Signal Model and Accuracy Analysis
After IF digital sampling and quadrature demodulation, the complex envelope of the direct wave signal of the reference channel and the target echo signal of the surveillance channel can be extracted, which are expressed as:
where
is the transmitted signal of radar emitter;
and
are receiver noise of reference channel and surveillance channel, respectively;
,
, and
are not correlated with each other;
and
is the signal attenuation coefficient;
and
are the time delay of direct wave and target echo relative to the transmitted signal; and
is the Doppler frequency shift of the moving target echo signal relative to the transmitted signal.
Using the direct wave as the reference signal, the target echo signal can be processed by passive coherent detection. Passive coherent detection and ambiguity function processing are equivalent. The cross-ambiguity function of the target echo signal and reference signal of the receiving channel can be expressed as:
For each delay value , the calculation of cross-ambiguity function can be regarded as the Fourier transform processing of a set of mixed products .
Substituting Equations (8) and (9) into Equation (10) can obtain the output result of cross-ambiguity function processing:
Since
,
, and
are not correlated with each other, i.e.,
, therefore Equation (11) can be simplified as follows:
From the property of ambiguity function, it can be seen that the peak value of the cross-ambiguity function
is generated at
, which corresponds to the time delay
of the target echo relative to the direct wave and the frequency shift
of the target echo relative to the direct wave. Therefore, the time delay
and frequency shift
can be jointly estimated by searching the peak of the cross-ambiguity function
in two dimensions.
The estimation accuracy of time delay and frequency shift that are obtained by cross-ambiguity function processing can use the theoretical analysis results of the maximum likelihood method in signal detection theory to estimate the time delay and frequency shift. From this, it can be obtained that the Cramer–Rao Bound (CRB) of the time delay and frequency shift estimation variance:
where
is the output signal-to-noise ratio of the cross-ambiguity function processing,
is the root mean square bandwidth of the signal, and
is the root mean square time width of the signal, which means the effective duration of the signal.
It is assumed that the signal of non-cooperative radar emitter is linear frequency modulation pulse train signal, and its signal complex modulation function is:
where
is the signal pulse width,
is the signal bandwidth,
is the pulse repetition period, and
is the number of pulses.
The Cramer–Rao Bound(CRB) of time delay and frequency shift estimation variance of LFM pulse train signal can be calculated as follows:
The above time delay and frequency shift estimation accuracy analysis shows that: (1) the time delay estimation accuracy of the LFM pulse train signals is affected by signal bandwidth, pulse width, number of pulses, and input signal-to-noise ratio of reference and surveillance channels. Among them, the larger the signal bandwidth , the larger the root mean square bandwidth of the signal, and the higher the delay estimation accuracy; the greater the signal pulse width , the number of pulses , the input signal-to-noise ratio of reference channel , and the input signal-to-noise ratio of surveillance channel , the greater the output signal-to-noise ratio of cross-ambiguity function processing , and the higher the delay estimation accuracy. (2) The frequency shift estimation accuracy of the LFM pulse train signals is affected by the signal repetition period, pulse number, bandwidth, pulse width, and the input signal-to-noise ratio of the reference and surveillance channels. Among them, the larger the signal repetition period and the number of pulses , the larger the root mean square time width of the signal and the higher the accuracy of frequency shift estimation; the larger the signal pulse width , the number of pulses, the input signal-to-noise ratio of reference channel , and the input signal-to-noise ratio of surveillance channel , the larger the output signal-to-noise ratio of cross-ambiguity function processing , and the higher the accuracy of frequency shift estimation.
2.5. Signal Processing Flow
The key of signal processing in the HBR system is the correlation (ambiguity) processing between the surveillance channel and the reference channel. The correlation (ambiguity) function mainly measures the matching degree of the signal with time delay and the Doppler frequency shift. In order to realize the correlation (ambiguity) function, it is necessary to save the transmitted signal waveform as the reference signal for signal processing.
Signal processing algorithms of the HBR system mainly include reference signal reconstruction, time-frequency synchronization and azimuth synchronization processing of reference channel, passive coherent processing, and parameter estimation of the surveillance channel [
22]. The signal processing flow is shown in
Figure 5.
In
Figure 5, the reference channel is responsible for receiving the direct wave of non-cooperative radar, and completing reference signal extraction and reconstruction, time-frequency synchronization, and azimuth synchronization. The surveillance channel is responsible for receiving the target echo, completing pulse compression, direct wave interference suppression, non-coherent integration, MTI processing/MTD processing, clutter map processing, adaptive CFAR detection, obtaining the azimuth, bistatic range and Doppler frequency of the target, and finally realizing the positioning of maritime targets. The technical principle and implementation process of the above main signal processing algorithms are introduced in detail below.
2.5.1. Reference Signal Extraction and Reconstruction
The amplitude fluctuation of the direct wave that was received by the receiving station varies greatly, and the receiving station and the target are generally not covered by the main lobe of the radar emitter at the same time. When the radar antenna points to the target, the receiving station detects the direct wave only by the side lobe or back lobe, which increases the difficulty of extracting the coherent reference signal of the direct wave. The transmission channel of the HBR system is very complex, and its characteristics change very violently. It has both time dispersion and frequency dispersion, especially near the baseline of bistatic radar system. If these interferences to the direct wave cannot be effectively removed, the performance of the system will be significantly reduced. Therefore, whether the original transmitted signal can be recovered from the direct wave signal is of great significance to the system.
The transmitted waveform is not directly available to the non-cooperative bistatic radar receiver. Therefore, the complex envelope of the transmitted signal must be derived from the direct path signal that is intercepted by the receiver. In the actual environment, the received direct path signal is corrupted by thermal noise, and possibly multi-path, clutter, and/or other propagation effects. The corruption of direct-path signal generally causes signal processing losses of ambiguity function, so the direct-path signal must be recovered before ambiguity function processing.
According to the envelope characteristics of constant modulus during pulse duration and zero modulus during pulse interval of direct wave signal, under the condition of unknown a priori information of transmitted signal, referring to the idea of blind equalization of continuous signal in communication system, the complex envelope of the transmitted pulse is estimated from direct wave that is disturbed by clutter and multipath by using an improved constant modulus algorithm (CMA) and multimode algorithm (MMA), to reconstruct the reference signal that is required for correlation processing.
The output of the adaptive equalizer is:
The iterative formula of the improved CMA + MMA algorithm is as follows:
where
is the square of the radius of the circle nearest to
in the IQ circle of adaptive equalizer output
at
-th moment. Assuming that the direct wave signal is distributed on
circles with known radius,
represents the square of the radius of the
-th circle. For the pulse radar signal, the signal modulus is zero during the pulse interval, so
is usually equal to 2.
is the initial iteration threshold,
and
are the iteration steps of CMA and MMA algorithms, respectively. Since the residual error of CMA is usually larger than that of MMA, the value of
is usually larger than that of
. The value range of judgment distance
is:
where
is the minimum distance of the signal modulus and
is the radius of the outermost circle of IQ circle. For the direct wave pulse signal,
is equal to the modulus of the transmission envelope during the pulse duration, which is the pulse amplitude of the non-cooperative radar signal.
2.5.2. Time-Frequency Synchronization and Azimuth Synchronization Processing
Due to the separation of the transmitter and receiver, the local oscillator of the transmitter and receiver is incoherent, resulting in the frequency difference of its carrier frequency. The frequency difference will be mixed with the Doppler phase of the echo, which will affect the estimation of the real Doppler center frequency and lead to the Doppler phase mismatch of each target. As there is no information interaction with the transmitter, the real pulse repetition rate is unknown, and the obtained one-dimensional data cannot be accurately divided into two dimensions. Therefore, it is necessary to use the direct wave signal of the reference channel to complete the time-frequency synchronization processing of the surveillance channel.
The flow of time-frequency synchronization processing is as follows: after locating the approximate position of the effective data, the PRF of the transmitted signal can be estimated by pulse compression processing of the signal. According to the PRF information and sampling clock, the original signal can be coarsely synchronized. After coarse synchronization, the original one-dimensional signal becomes a two-dimensional pulse signal. According to the nominal sampling rate and PRF, the continuous collected data are discretized to obtain the two-dimensional time-domain signal. In fact, this operation completes the coarse PRF synchronization. The range migration curve and phase history are extracted after pulse compression of the direct wave signal after coarse synchronization, and the range migration and phase history are used to correct the range migration and phase of the echo signal, so as to realize fine synchronization.
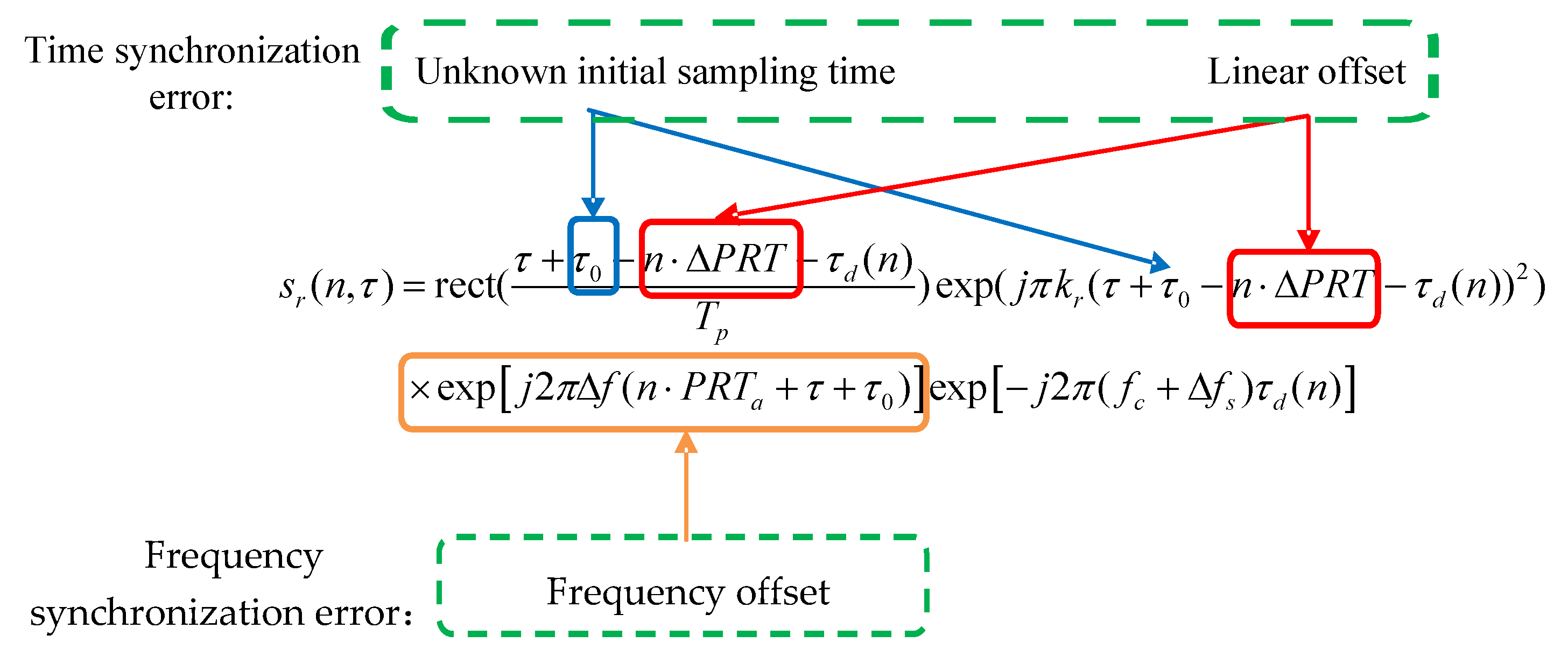
Synchronization processing is to estimate the initial sampling time, correct the linear offset, and the frequency offset of transmitting and receiving carrier frequencies. The direct wave signal after coarse synchronization is processed by pulse compression to obtain the peak position history of direct wave, and the Doppler center frequency and initial sampling distance can be estimated. According to the estimated value of the Doppler center frequency, the time synchronization error and the frequency synchronization error can be calculated. The expression of the synchronization error is shown in
Figure 6.
After the synchronization error is estimated, the time and frequency synchronization error can be compensated according to the expression of the synchronization error in the signal: (1) Time synchronization: for the -th pulse, shift time to the left and (2) frequency synchronization: for the -th pulse, multiply by phase .
Azimuth synchronization information can also be extracted from the direct wave signal. The azimuth of the radar transmitter is estimated by the strongest pulse peak corresponding to the antenna of the transmitting station pointing directly to the receiving station . In the first few rounds of antenna scanning, the transmitted direct pulse train is sent to the azimuth synchronizer, and the average value of the antenna scanning period is measured as the predicted value of the next antenna scanning period. This method is suitable for the situation that the antenna of the transmitting station rotates at a uniform speed.
2.5.3. Signal Detection in Surveillance Channel
Signal detection in a surveillance channel mainly includes pulse compression, direct wave interference suppression, non-coherent integration, MTI processing/MTD processing, clutter map processing, and adaptive CFAR detection. The main procedures are summarized as follows:
Pulse compression: Pulse compression is accomplished by correlating the reference signal with the received target signal in the scattered echo. The reconstruction of the reference signal can be completed by the improved constant modulus algorithm and multimode algorithm (improved CMA+MMA) mentioned above. For the sake of algorithm simplicity, the pulse signal with the highest signal-to-noise ratio (SNR) in the received signal can also be directly selected as the reference signal sample.
Direct wave interference suppression: According to the time-domain separation characteristics of pulse signals, direct wave interference is divided into two cases: one is that the time-domain of direct wave and target echo do not overlap, and the other is that of time-domain overlap. In the first case, the time window technology is proposed to eliminate the direct wave interference. In the second case, the adaptive cancellation technique is considered to suppress the direct wave interference. The adaptive filter can adopt different adaptive algorithms. The function of these algorithms is to adjust the weighting of the filter according to the input signal and output error signal, so that the output signal of the filter is closest to the interference signal, and complete the process of adaptive interference cancellation through the cancellation of the subtractor. In the actual design of the system, the adaptive filter adopts least mean square (LMS) filter, least square (RLS) filter, and so on.
Non-coherent integration: When the non-cooperative radar emitter antenna scans and points to the target, the echo that is received by the surveillance channel of the receiving station is a high-frequency pulse train signal. In order to improve the detection performance of the system, the echo pulse train is usually integrated. After multi-pulse integration, the signal-to-noise ratio of the surveillance channel is improved, which is conducive to small target detection. Although the effect of non-coherent integration is not as good as coherent integration, the implementation of non-coherent integration is relatively simple and there are no strict coherence requirements for the system. Therefore, non-coherent integration is still used in many practical applications. Non-coherent integration is used to accumulate the envelope amplitude of the echo signal of the same distance unit for adjacent N repetition periods. In the actual design of the system, the small sliding window detection method is used for non-coherent integration. The window length L of the small sliding window detector is generally 5~7.
MTI/MTD processing: In case of strong clutter, bistatic radar can also use moving target processing equipment to detect small targets at sea. The main purpose of moving target display (MTI) technology is to enhance the target detection ability of radar and display moving targets. In the actual design of the system, three adjacent pulse cancellation plus cascaded adaptive cancellation methods are used to display moving targets. When only the dual-mode clutter (only two kinds of clutter with different velocities) is considered, because the ground clutter filter has basically filtered out the ground clutter, the cascaded adaptive filter only suppresses another kind of moving clutter (sea clutter). The main purpose of moving target processing (MTD) technology is to obtain the Range-Doppler map (R-D map) of moving targets. In the actual design of the system, the moving target processing (MTD) is carried out by FFT processing of the pulses with multiple adjacent pulse repetition periods, which is equivalent to the coherent integration of the echo pulse train.
Clutter map processing: This divides the whole detection area into several clutter map units. For each unit, it uses its own limited echo input to iterate repeatedly to obtain the detection threshold at the unit. Finally, the target echo in a certain detection area can be detected by the preset detection threshold of the clutter map unit. Clutter map cancellation is realized by subtracting the echo signal from the clutter map storage unit. For stationary clutter, the clutter average value of the clutter map storage unit is basically the same as that of echo, and there is basically no residue after cancellation. For a moving target that is not in the same azimuth distance unit during two antenna scans, the moving target value of the clutter map storage unit makes little contribution to the establishment of the clutter map after being averaged. Therefore, there is a large residual echo of the moving target after cancellation, so the stationary clutter can be cancelled to detect the moving target. In the actual design of the system, two time-domain clutter detection techniques, mean clutter map (ME-CM) and single pole feedback clutter map (SPFB-CM), are used.
CFAR detection: The detection performance of maritime targets under the background of bistatic sea clutter is easily affected by two aspects: first, when detecting at different bistatic angles, the energy distribution of sea clutter is uneven, the sea clutter is vulnerable to the clutter abnormal cell with sudden increase of power, and the false alarm rate and false detection rate are high. Second, the complex non-uniform environment that is formed by the distance sidelobes of inshore mountains, buildings, islands, and other strong scattering points makes it difficult to estimate the background power level in the formation of the CFAR detection threshold. Therefore, it is necessary to carry out adaptive CFAR detection of maritime targets under the background of bistatic sea clutter. In the actual design of the system, the cell averaging constant false alarm rate (CA-CFAR) detector and the improved variability index constant false alarm rate with abnormal cell deletion (CVI-CFAR) detector are used to detect small maritime targets.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}