
A Multi-Pulse Cross Ambiguity Function for the Wideband TDOA and FDOA to Locate an Emitter Passively


Abstract
:1. Introduction
- (1)
- Acronyms
TDOA Time Difference of Arrival FDOA Frequency Difference of Arrival UAV Unmanned Aerial Vehicle MPCAF Multi-Pulse Cross Ambiguity Function CRLB Cramer–Rao Lower Bound CAF Cross Ambiguity Function CAF-CS CAF’s Coherent Summation KTM Keystone Transform-Based Method 2-D Two-Dimensional TOA Time of Arrival RCM Range Cell Migration PRT Pulse Repetition Time PRF Pulse Repetition Frequency FFT Fast Fourier Transform IFFT Inverse Fast Fourier Transform SNR Signal-to-Noise Ratio LFM Linear Frequency Modulation SAR Synthetic Aperture Radar - (2)
- Operators
* Conjugate operator Convolution operator T Transposed operator Diagonal matrix Real part Imaginary part Parameter dual (τ,v) that maximizes f(τ,v) - (3)
- Matrix
The transmitted signals in the frequency domain Ti TOA matrix of receiver i F1,m The m-th Doppler matrix Hm0 The reference pulse in a raw data-based method T′m0 TDOA offset matrix G The reference pulse in a signal parameter-based method
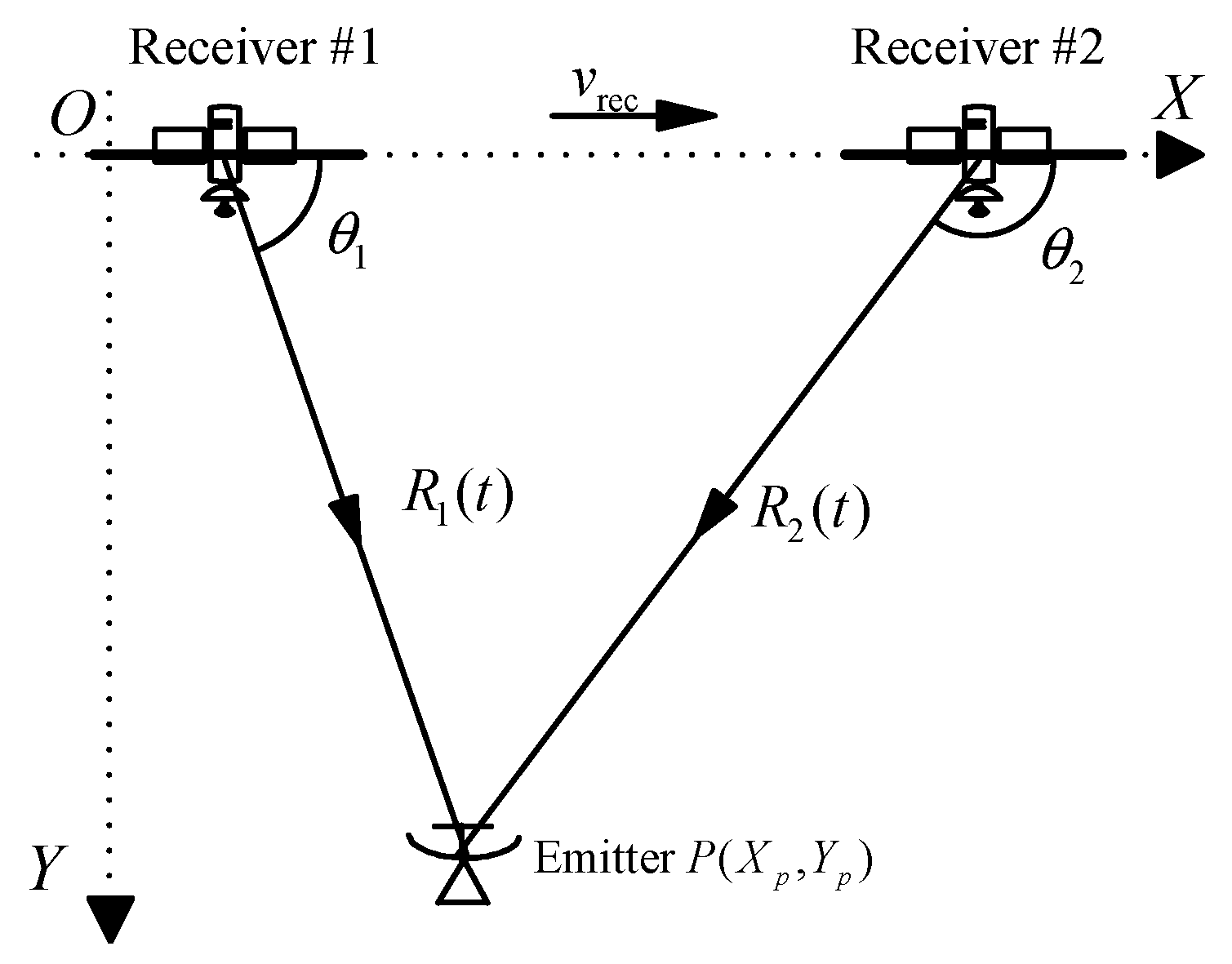
2. A Signal Model
3. Method
3.1. A Multi-Pulse CAF
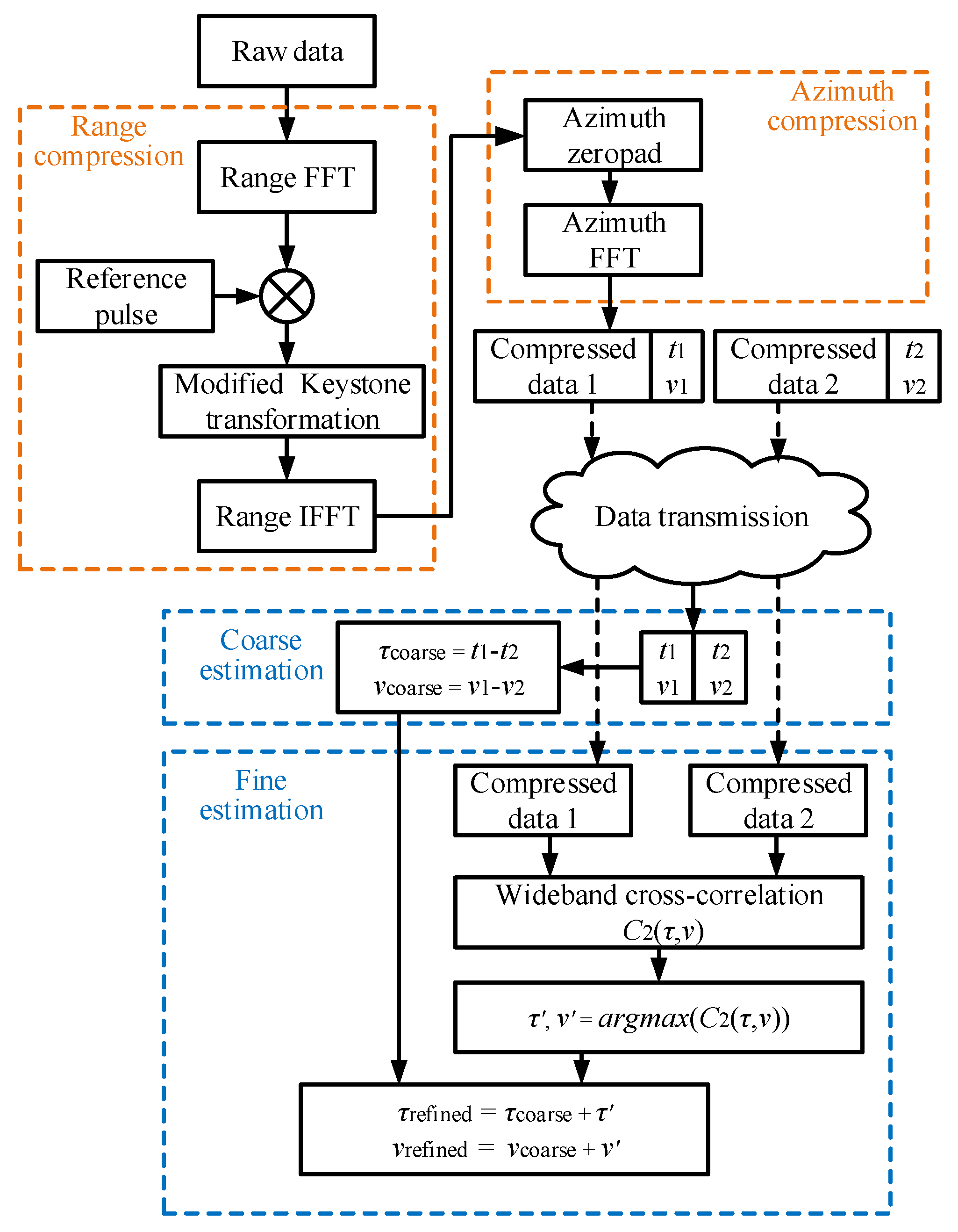
3.2. Wideband TDOA and FDOA Estimation Using the MPCAF
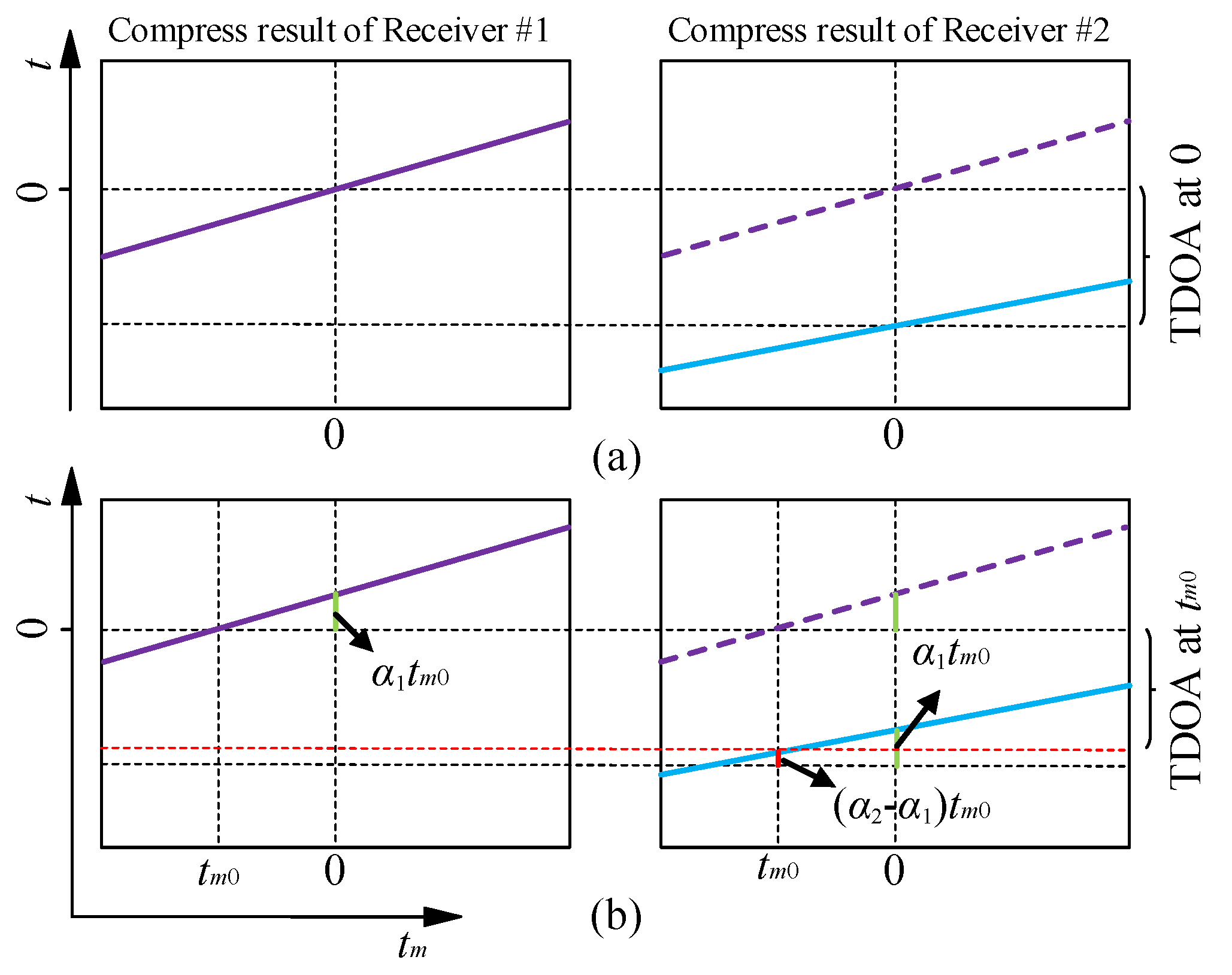
3.2.1. Data Compression and Coarse TDOA and FDOA Estimations
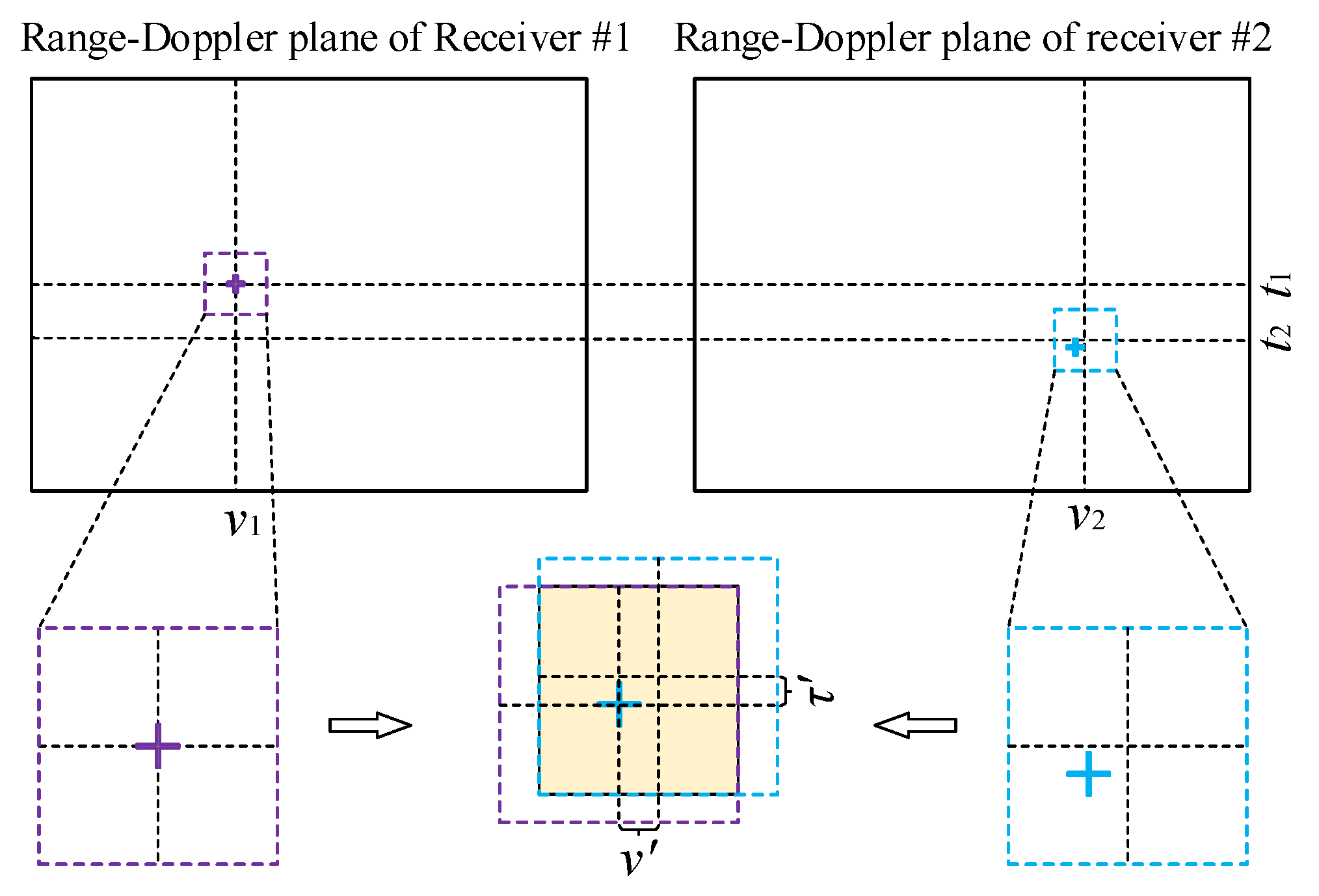
3.2.2. Refining TDOA and FDOA Estimations
4. Performance Analysis and Consideration in Applications
4.1. CRLB Analysis
4.2. Relationship with Cyclostationarity-Based Algorithms
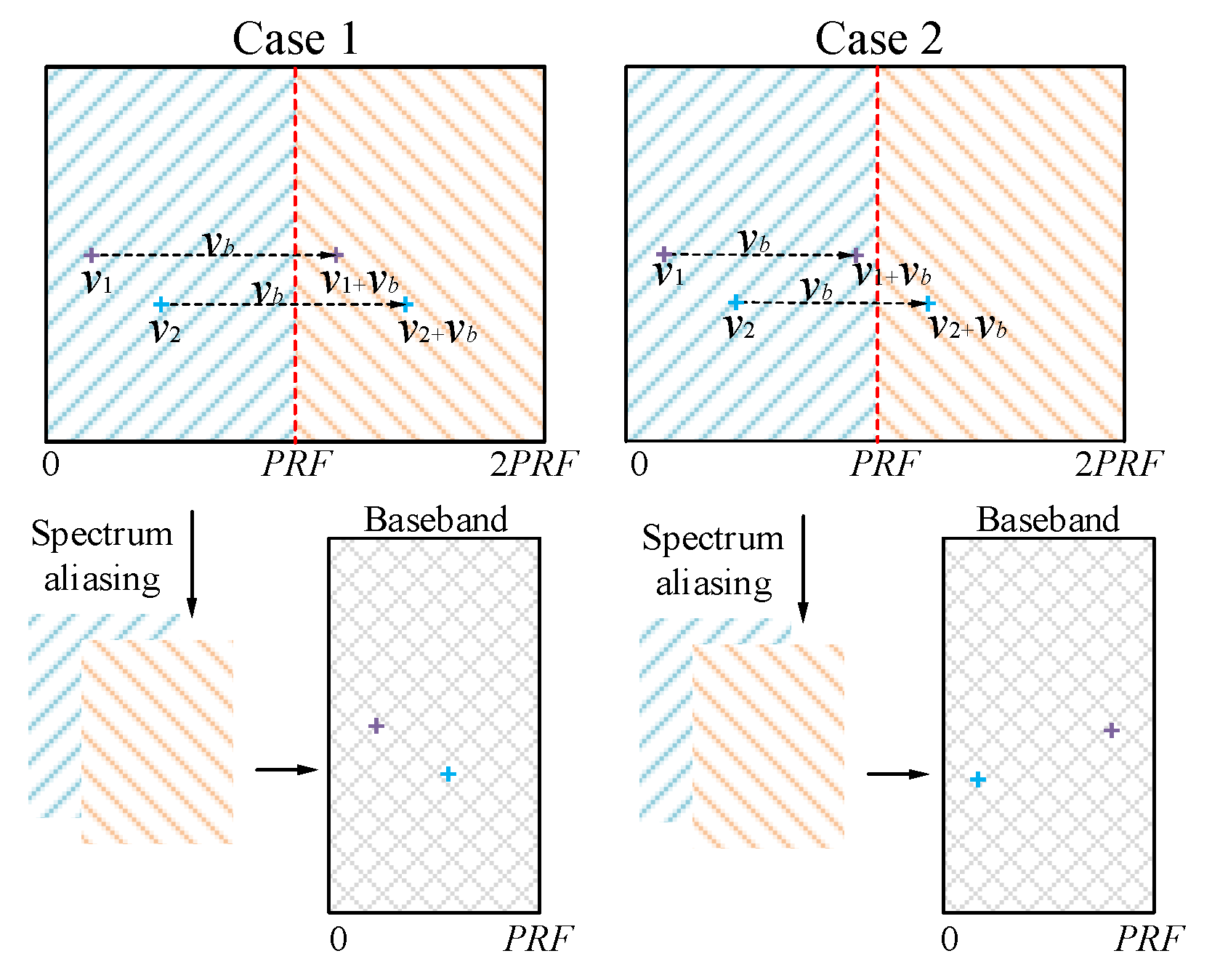
4.3. Doppler Aliasing
- Rearranging the raw data according to the true PRF after estimating the error of the azimuth sampling rate and calculating the true PRF.
- b.
- Estimating the Doppler aliasing number n of each receiver according to the RCM.
4.4. Computational Complexity
5. Results
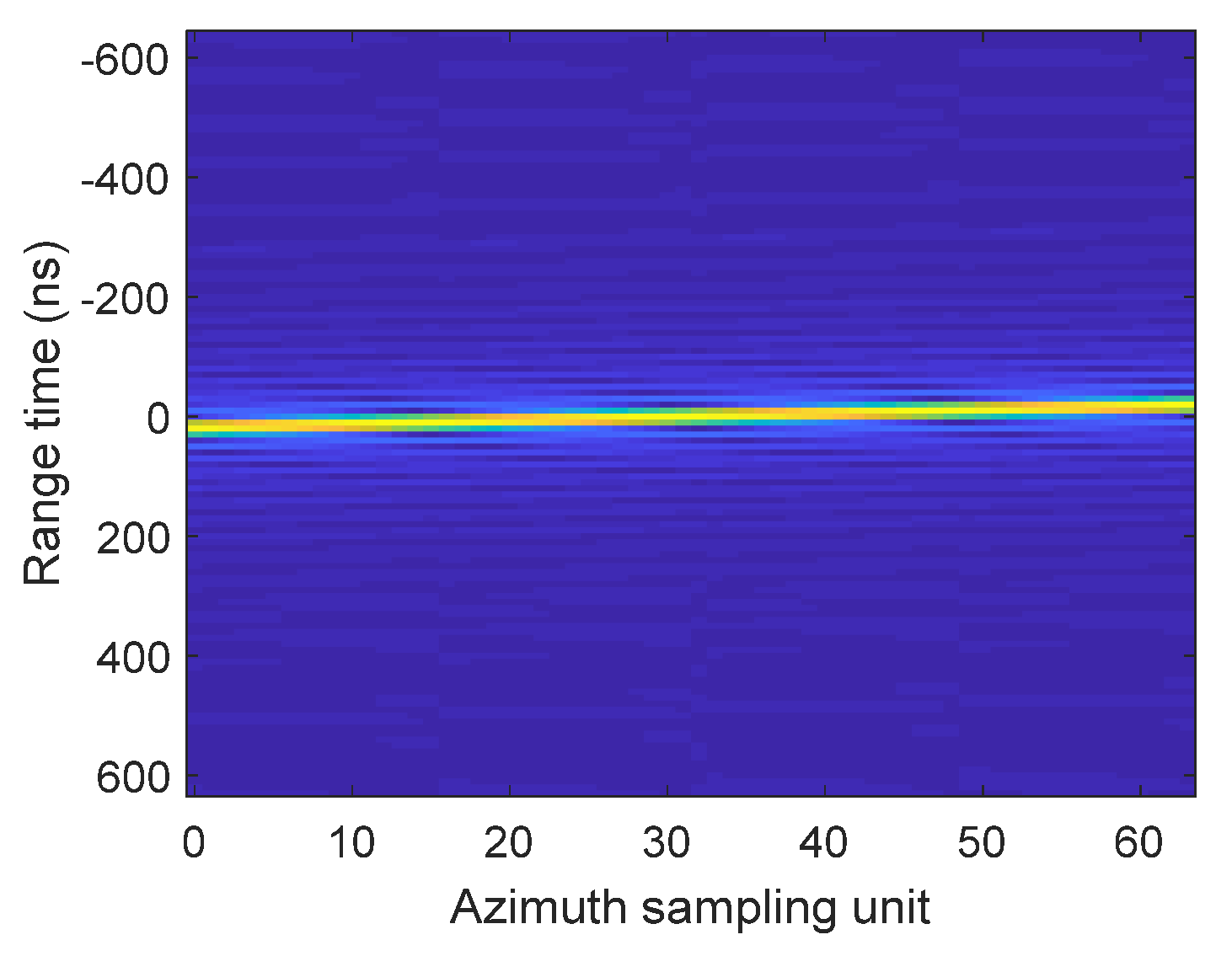
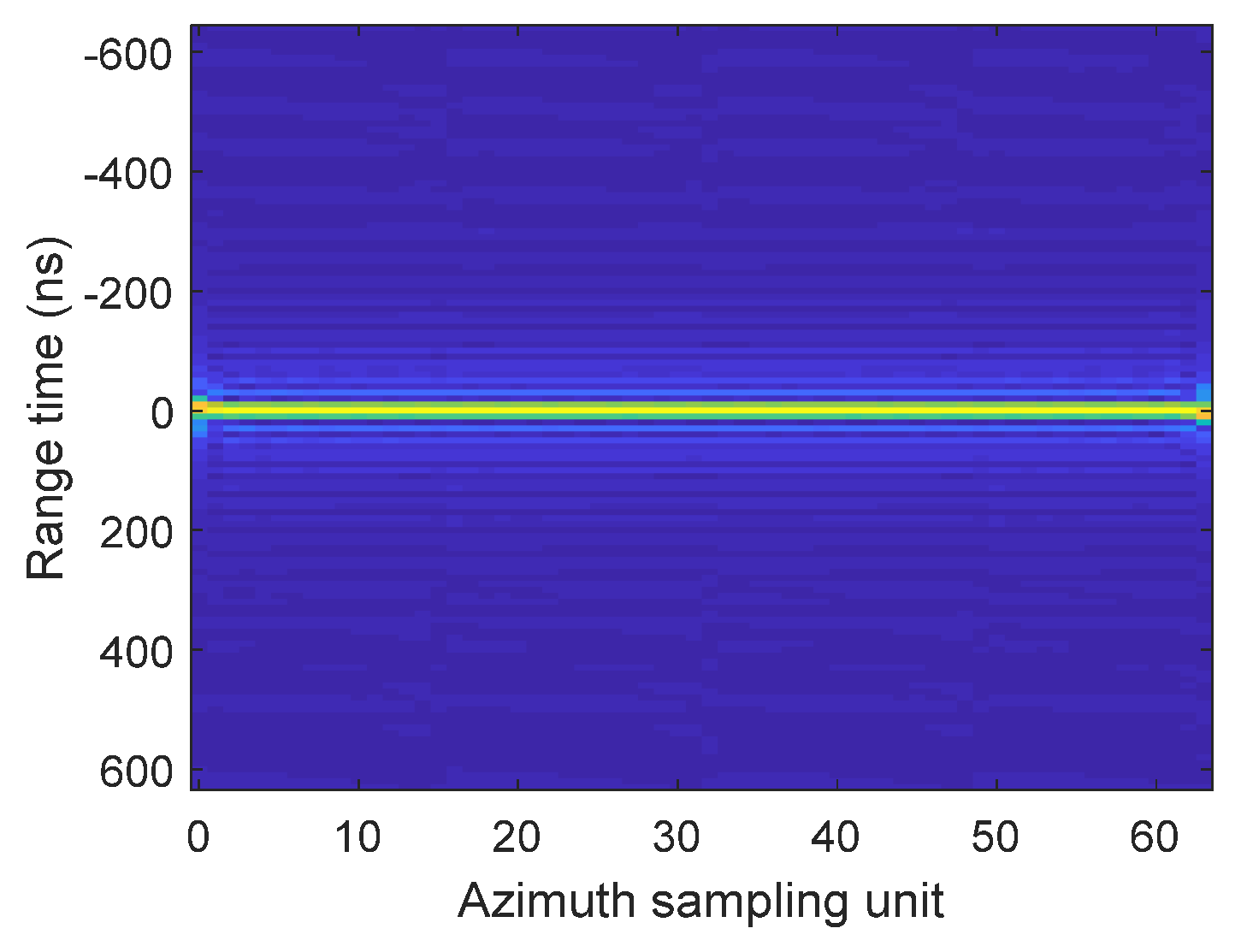
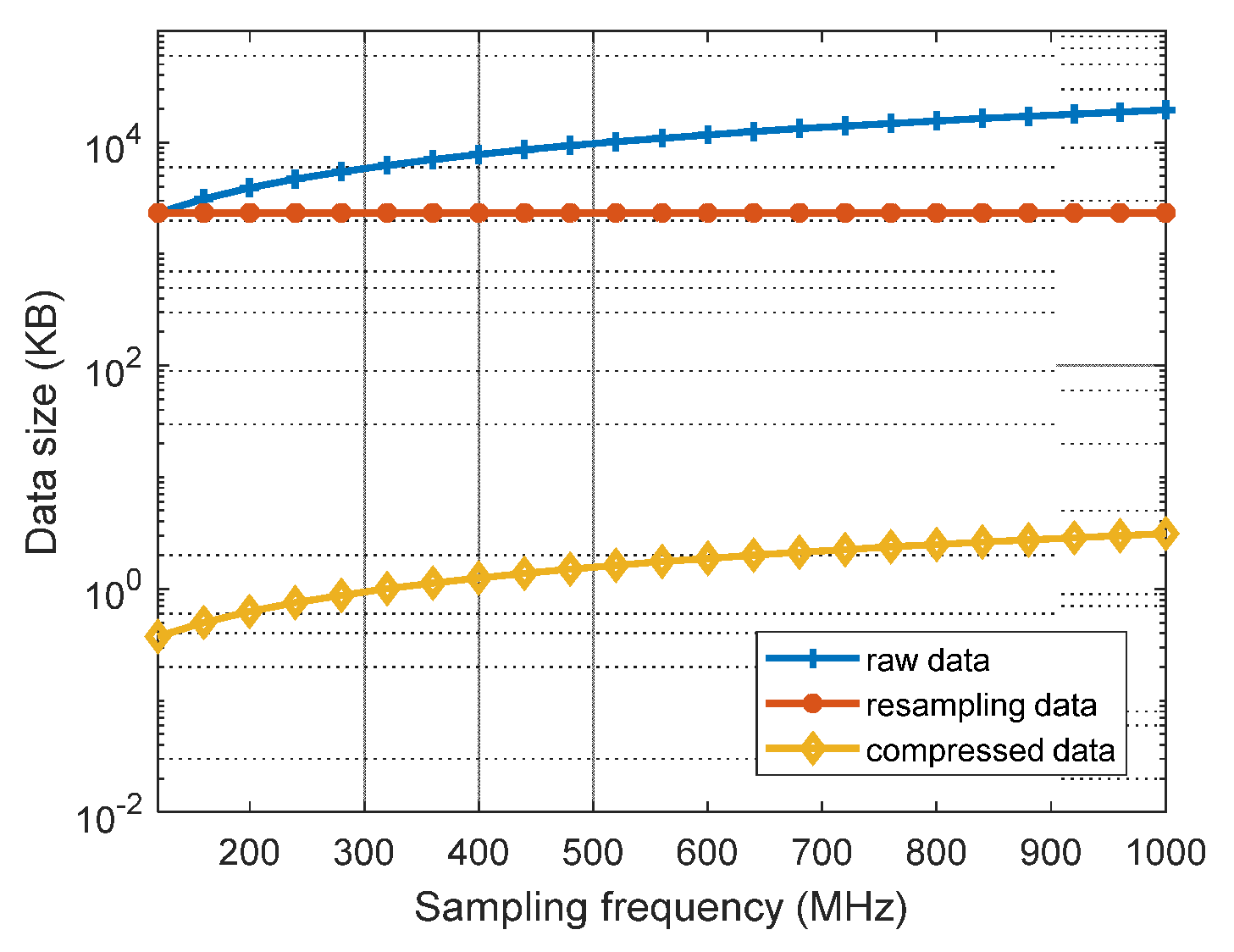
5.1. Data Compression Simulation
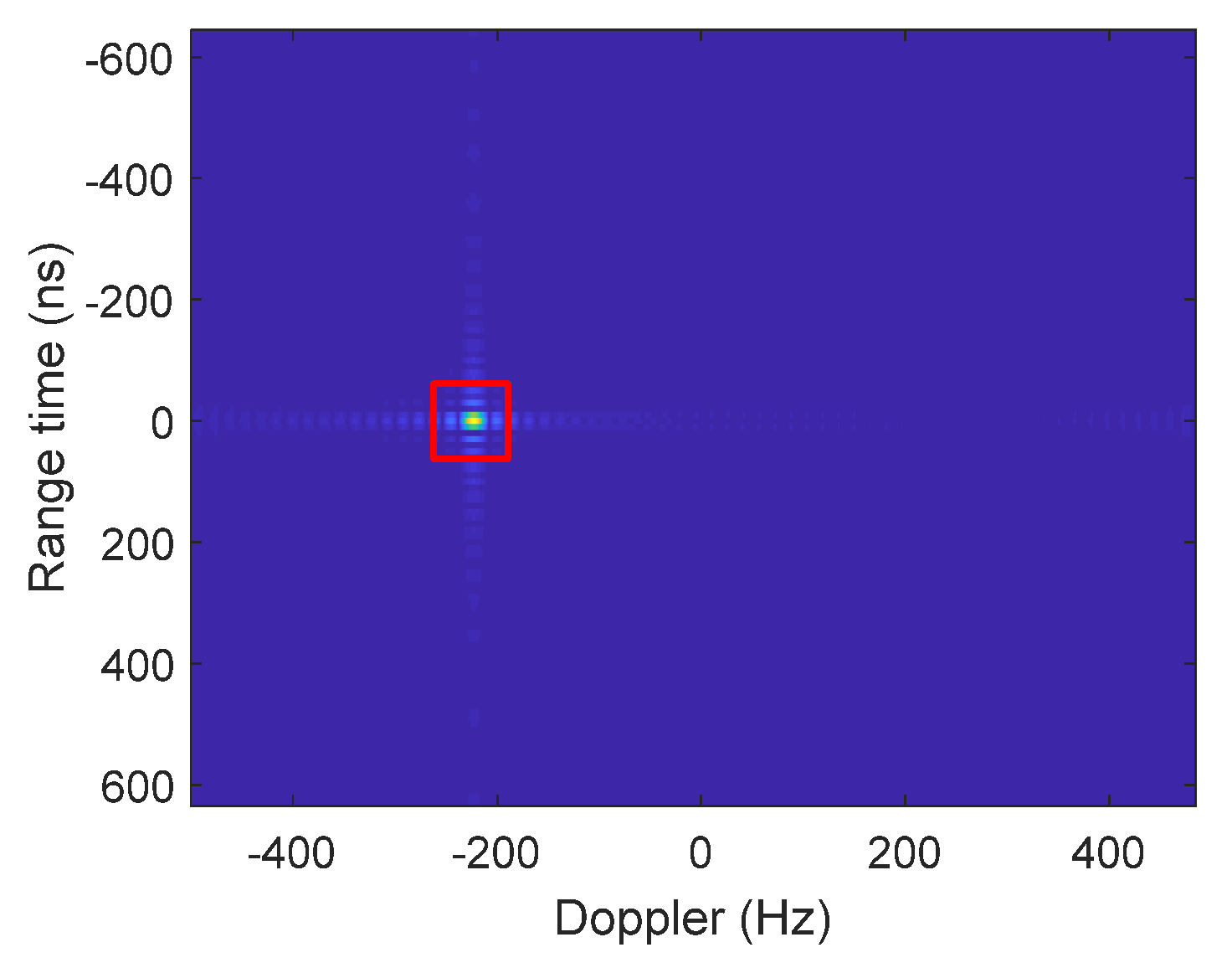
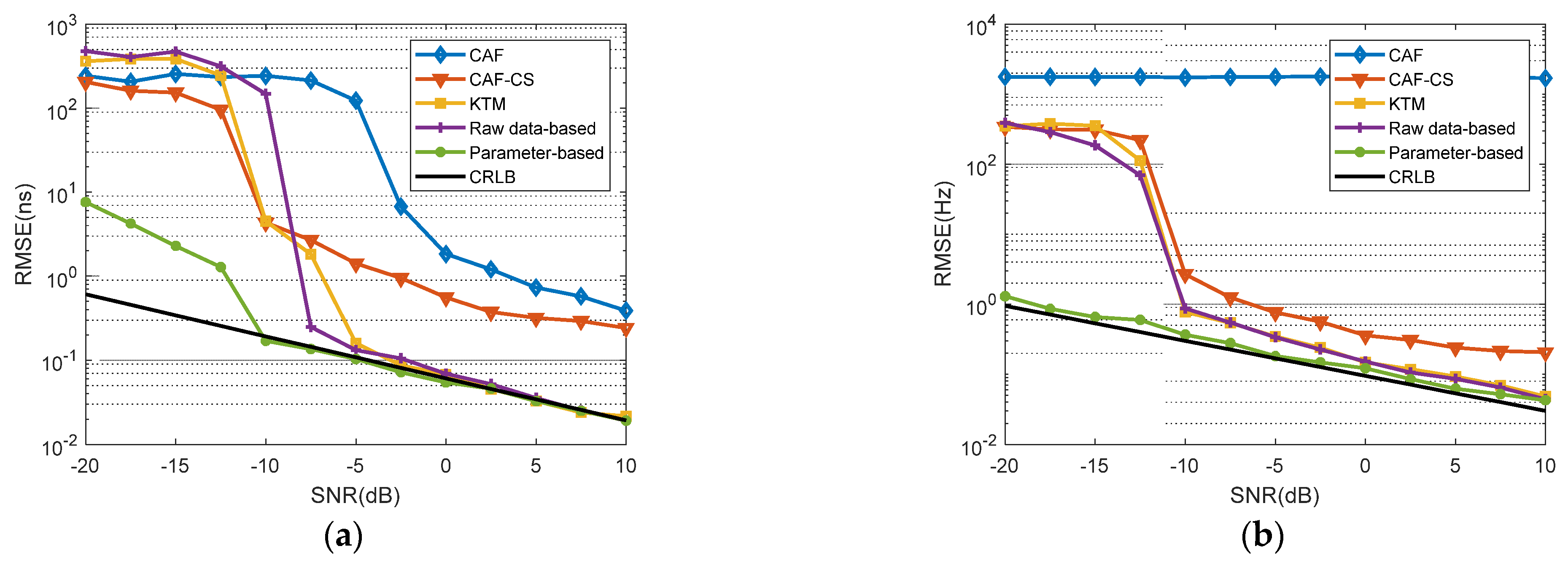
5.2. Numerical TDOA and FDOA Estimations
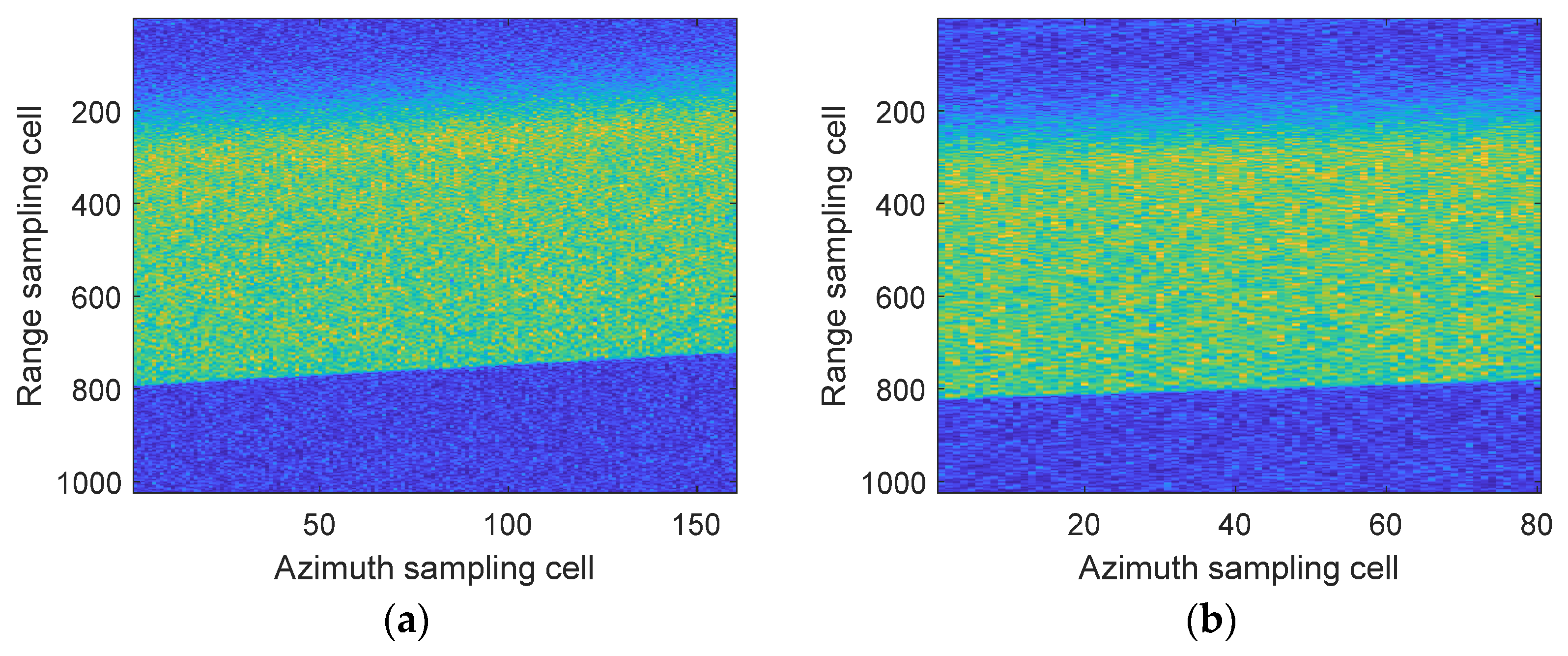
5.3. Hardware-In-The-Loop Data
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Zou, Y.; Wan, Q. Asynchronous Time-of-Arrival-Based Source Localization with Sensor Position Uncertainties. IEEE Commun. Lett. 2016, 20, 1860–1863. [Google Scholar] [CrossRef]
- Shen, H.; Ding, Z.; Dasgupta, S.; Zhao, C. Multiple Source Localization in Wireless Sensor Networks Based on Time of Arrival Measurement. IEEE Trans. Signal Process. 2014, 62, 1938–1949. [Google Scholar] [CrossRef]
- Ricciato, F.; Sciancalepore, S.; Gringoli, F.; Facchi, N.; Boggia, G. Position and Velocity Estimation of a Non-Cooperative Source from Asynchronous Packet Arrival Time Measurements. IEEE Trans. Mob. Comput. 2018, 17, 2166–2179. [Google Scholar] [CrossRef]
- Nogueira, L.C.F.; Petraglia, M.R. Robust localization of multiple sound sources based on BSS algorithms. In Proceedings of the 2015 IEEE 24th International Symposium on Industrial Electronics (ISIE), Rio de Janeiro, Brazil, 3–5 June 2015; pp. 579–583. [Google Scholar]
- Pattison, T.; Chou, S.I. Sensitivity analysis of dual-satellite geolocation. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 56–71. [Google Scholar] [CrossRef]
- Amishima, T.; Wakayama, T.; Okamura, A.; Okamura, A. TDOA association for localization of multiple emitters when each sensor receives different number of incoming signals. In Proceedings of the 2014 Proceedings of the SICE Annual Conference (SICE), Sapporo, Japan, 9–12 September 2014; pp. 1656–1661. [Google Scholar] [CrossRef]
- Park, C.; Chang, J. Robust TOA source localisation algorithm using prior location. IET Radar Sonar Navig. 2019, 13, 384–391. [Google Scholar] [CrossRef]
- Ho, K.C.; Wenwei, X. An accurate algebraic solution for moving source location using TDOA and FDOA measurements. IEEE Trans. Signal Process. 2004, 52, 2453–2463. [Google Scholar] [CrossRef]
- Vidal-Valladares, M.G.; Díaz, M.A. A Femto-Satellite Localization Method Based on TDOA and AOA Using Two CubeSats. Remote Sens. 2022, 14, 1101. [Google Scholar] [CrossRef]
- Zhou, T.; Yi, W.; Kong, L. Non-Cooperative Passive Direct Localization Based on Waveform Estimation. Remote Sens. 2021, 13, 264. [Google Scholar] [CrossRef]
- Devaney, A. Time reversal imaging of obscured targets from multistatic data. IEEE Trans. Antennas Propag. 2005, 53, 1600–1610. [Google Scholar] [CrossRef]
- Prada, C.; Fink, M. Eigenmodes of the time reversal operator: A solution to selective focusing in multiple-target media. Wave Motion 1994, 20, 151–163. [Google Scholar] [CrossRef]
- Marengo, E.A.; Gruber, F.K.; Simonetti, F. Time-Reversal MUSIC Imaging of Extended Targets. IEEE Trans. Image Process. 2007, 16, 1967–1984. [Google Scholar] [CrossRef]
- Ciuonzo, D. On Time-Reversal Imaging by Statistical Testing. IEEE Signal Process. Lett. 2017, 24, 1024–1028. [Google Scholar] [CrossRef] [Green Version]
- Hu, D.; Huang, Z.; Liang, K.; Zhang, S. Coherent TDOA/FDOA estimation method for frequency-hopping signal. In Proceedings of the 2016 8th International Conference on Wireless Communications & Signal Processing (WCSP), Yangzhou, China, 13–15 October 2016; pp. 1–5. [Google Scholar]
- Wang, Y.; Ho, K.C. TDOA Positioning Irrespective of Source Range. IEEE Trans. Signal Process. 2017, 65, 1447–1460. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, F.; Yang, L.; Jiang, W. An Improved Algebraic Solution for TDOA Localization with Sensor Position Errors. IEEE Commun. Lett. 2015, 19, 2218–2221. [Google Scholar] [CrossRef]
- Wei, H.-W.; Peng, R.; Wan, Q.; Chen, Z.-X.; Ye, S.-F. Multidimensional Scaling Analysis for Passive Moving Target Localization with TDOA and FDOA Measurements. IEEE Trans. Signal Process. 2010, 58, 1677–1688. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Y. An Efficient Semidefinite Relaxation Algorithm for Moving Source Localization Using TDOA and FDOA Measurements. IEEE Commun. Lett. 2017, 21, 80–83. [Google Scholar] [CrossRef]
- Zhou, L.; Zhu, W.; Luo, J.; Kong, H. Direct positioning maximum likelihood estimator using TDOA and FDOA for coherent short-pulse radar. IET Radar, Sonar Navig. 2017, 11, 1505–1511. [Google Scholar] [CrossRef]
- Wang, G.; Cai, S.; Li, Y.; Ansari, N. A Bias-Reduced Nonlinear WLS Method for TDOA/FDOA-Based Source Localization. IEEE Trans. Veh. Technol. 2016, 65, 8603–8615. [Google Scholar] [CrossRef]
- Noroozi, A.; Oveis, A.H.; Hosseini, S.M.; Sebt, M.A. Improved Algebraic Solution for Source Localization from TDOA and FDOA Measurements. IEEE Wirel. Commun. Lett. 2018, 7, 352–355. [Google Scholar] [CrossRef]
- Amar, A.; Weiss, A.J. Optimal radio emitter location based on the Doppler effect. In Proceedings of the 2008 5th IEEE Sensor Array and Multichannel Signal Processing Workshop, Darmstadt, Germany, 21–23 July 2008; pp. 54–57. [Google Scholar]
- Guo, F.; Zhang, Z.; Yang, L. TDOA/FDOA estimation method based on dechirp. IET Signal Process. 2016, 10, 486–492. [Google Scholar] [CrossRef]
- Stein, S. Algorithms for ambiguity function processing. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 588–599. [Google Scholar] [CrossRef]
- Betz, J. Effects of uncompensated relative time companding on a broad-band cross correlator. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 505–510. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, B.; Luo, M. Joint Delay and Doppler Shift Estimation for Multiple Targets Using Exponential Ambiguity Function. IEEE Trans. Signal Process. 2017, 65, 2151–2163. [Google Scholar] [CrossRef]
- Ulman, R.; Geraniotis, E. Wideband TDOA/FDOA processing using summation of short-time CAF’s. IEEE Trans. Signal Process. 1999, 47, 3193–3200. [Google Scholar] [CrossRef]
- Xiao, X.; Guo, F.; Feng, D. Low-complexity methods for joint delay and Doppler estimation of unknown wideband signals. IET Radar Sonar Navig. 2018, 12, 398–406. [Google Scholar] [CrossRef]
- Yeredor, A.; Angel, E. Joint TDOA and FDOA Estimation: A Conditional Bound and Its Use for Optimally Weighted Localization. IEEE Trans. Signal Process. 2011, 59, 1612–1623. [Google Scholar] [CrossRef]
- Stein, S. Differential delay/Doppler ML estimation with unknown signals. IEEE Trans. Signal Process. 1993, 41, 2717–2719. [Google Scholar] [CrossRef]
- Kim, D.-G.; Park, G.-H.; Kim, H.-N.; Park, J.-O.; Park, Y.-M.; Shin, W.-H. Computationally Efficient TDOA/FDOA Estimation for Unknown Communication Signals in Electronic Warfare Systems. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 77–89. [Google Scholar] [CrossRef]
- Darsena, D.; Gelli, G.; Iudice, I.; Verde, F. Detection and blind channel estimation for UAV-aided wireless sensor networks in smart cities under mobile jamming attack. IEEE Internet Things J. 2022, 9, 11932–11950. [Google Scholar] [CrossRef]
- Kelner, J.M.; Ziółkowski, C. Effectiveness of Mobile Emitter Location by Cooperative Swarm of Unmanned Aerial Vehicles in Various Environmental Conditions. Sensors 2020, 20, 2575. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, J.; Jin, Y.; Yu, H.; Liang, B.; Yang, D.-G. Real-Time Processing of Spaceborne SAR Data with Nonlinear Trajectory Based on Variable PRF. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–12. [Google Scholar] [CrossRef]
- Sun, G.-C.; Xing, M.; Xia, X.-G.; Wu, Y.; Bao, Z. Beam Steering SAR Data Processing by a Generalized PFA. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4366–4377. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, G.-C.; Guo, L.; Xing, M.; Yu, H.; Fang, R.; Wang, S. High-Resolution Real-Time Imaging Processing for Spaceborne Spotlight SAR With Curved Orbit via Subaperture Coherent Superposition in Image Domain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 1992–2003. [Google Scholar] [CrossRef]
- Wu, Y.; Sun, G.; Xia, X.-G.; Xing, M.; Bao, Z. An Improved SAC Algorithm Based on the Range-Keystone Transform for Doppler Rate Estimation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 741–745. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Main Distinctive Characteristics |
|---|---|
| CAF | Calculating the TDOA and FDOA with the whole raw data. |
| CAF-CS | Dividing the raw data into multiple segments, calculating the CAF with each segment data, and combining multiple CAFs coherently. |
| KTM | Arranging the raw data into a 2-D matrix, calculating the TDOA in the range frequency domain via conjugate multiplication, and calculating the FDOA in the azimuth time domain by FFT. |
| Parameters | Value |
|---|---|
| Carrier frequency | 1.45 GHz |
| Bandwidth | 50 MHz |
| Sampling frequency | 100 MHz |
| Pulse repetition frequency | 5 kHz |
| Pulse width | 10 μs |
| Pulse number | 64 |
| SNR | 5 dB |
| Parameters | Value |
|---|---|
| Central frequency | 1.45 GHz |
| Bandwidth | 20 MHz |
| Pulse width | 4 μs |
| Pulse repetition frequency | 10 kHz |
| Sampling rate | 200 MHz |
| CAF-CS | KTM | Proposed |
|---|---|---|
| 4096 × 80 | 4096 × 80 | 100 × 6 |
| TDOA Error (ns) | FDOA Error (Hz) | |
|---|---|---|
| CAF-CS | 13.85 | 192.67 |
| KTM | 4.15 | 3.30 |
| Proposed | 5.00 | 3.61 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Sun, G.-C.; Wang, Y.; Yang, J.; Zhang, Z.; Xing, M. A Multi-Pulse Cross Ambiguity Function for the Wideband TDOA and FDOA to Locate an Emitter Passively. Remote Sens. 2022, 14, 3545. https://doi.org/10.3390/rs14153545
Wang Y, Sun G-C, Wang Y, Yang J, Zhang Z, Xing M. A Multi-Pulse Cross Ambiguity Function for the Wideband TDOA and FDOA to Locate an Emitter Passively. Remote Sensing. 2022; 14(15):3545. https://doi.org/10.3390/rs14153545
Chicago/Turabian StyleWang, Yuqi, Guang-Cai Sun, Yong Wang, Jun Yang, Zijing Zhang, and Mengdao Xing. 2022. "A Multi-Pulse Cross Ambiguity Function for the Wideband TDOA and FDOA to Locate an Emitter Passively" Remote Sensing 14, no. 15: 3545. https://doi.org/10.3390/rs14153545