
Herbage Mass, N Concentration, and N Uptake of Temperate Grasslands Can Adequately Be Estimated from UAV-Based Image Data Using Machine Learning

 , ,
, ,
Abstract
:1. Introduction
- (i)
- To develop estimation models for DMY, N%, and Nup utilizing three ML algorithms (namely, partial least squares, support vector machines, and random forest).
- (ii)
- To compare the prediction accuracy of the developed models with and without structural features.
- (iii)
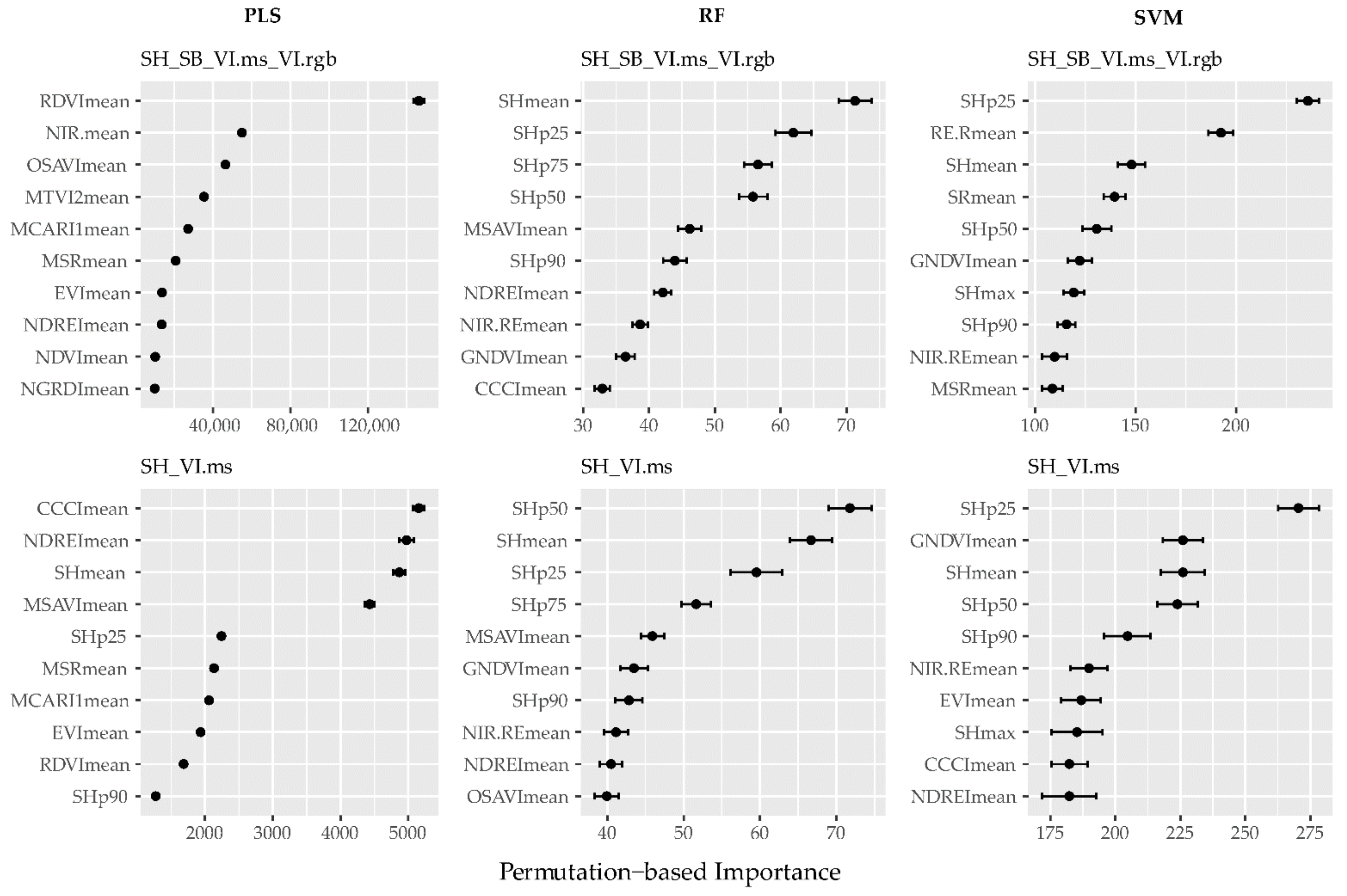
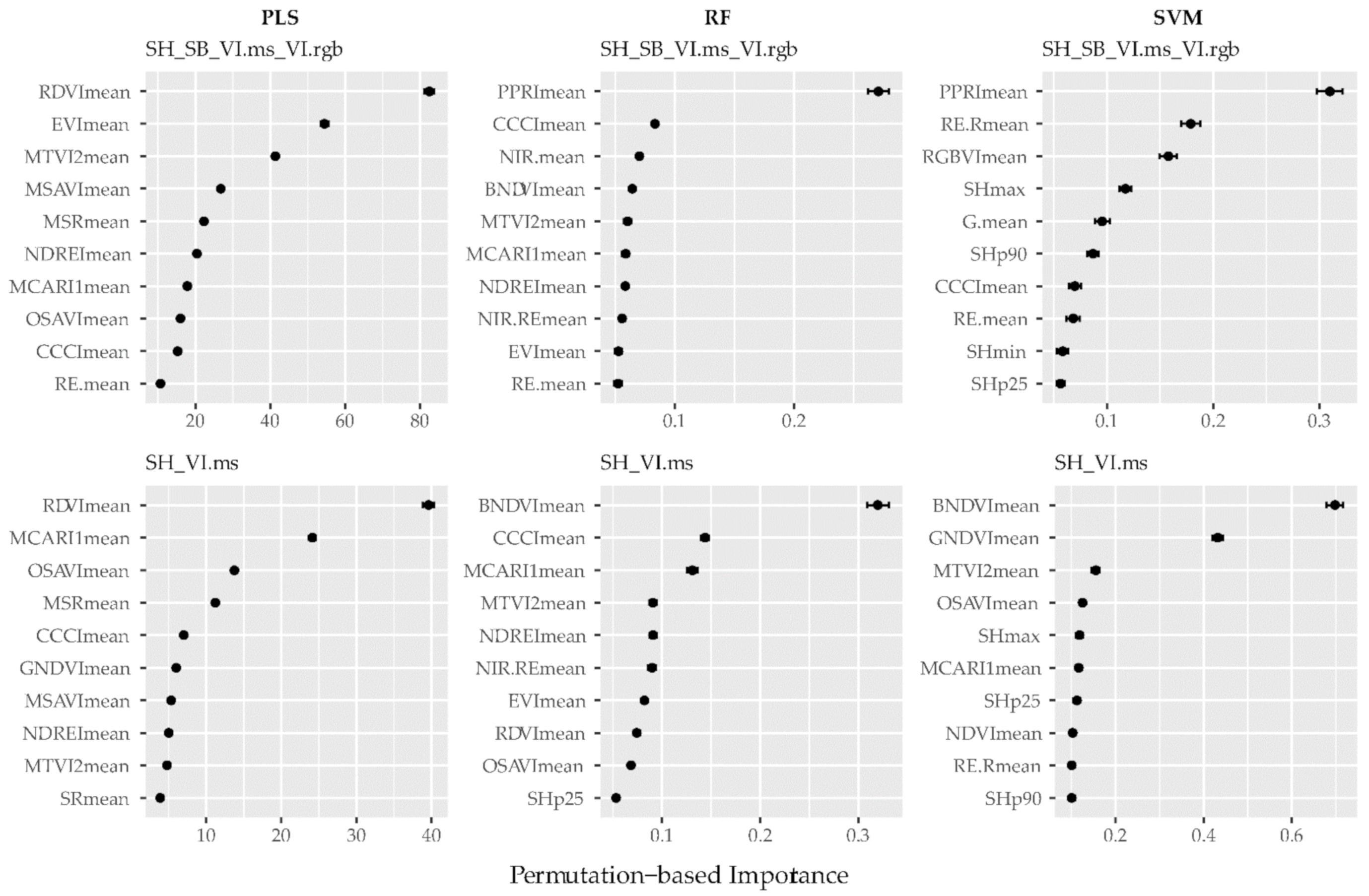
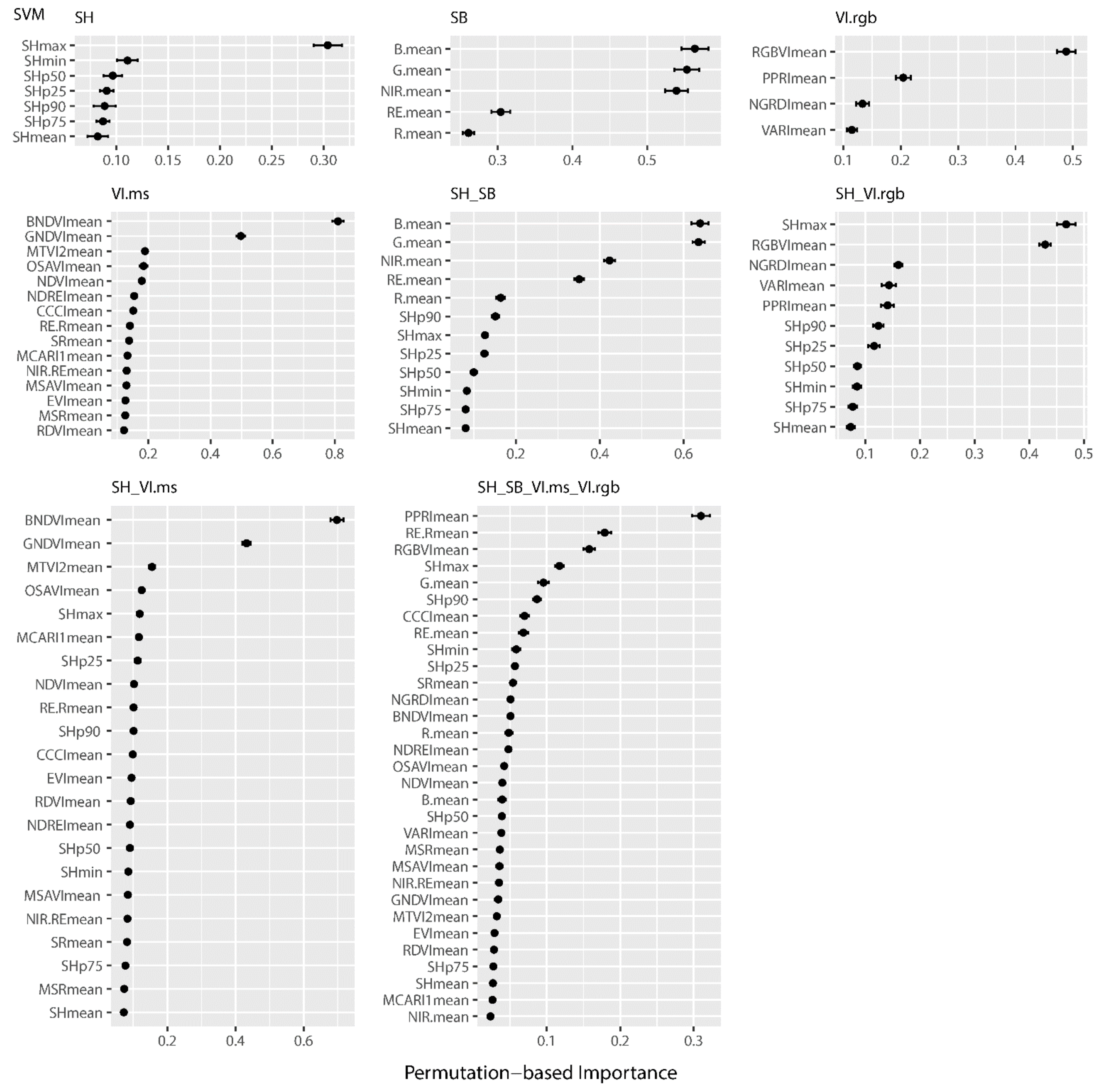
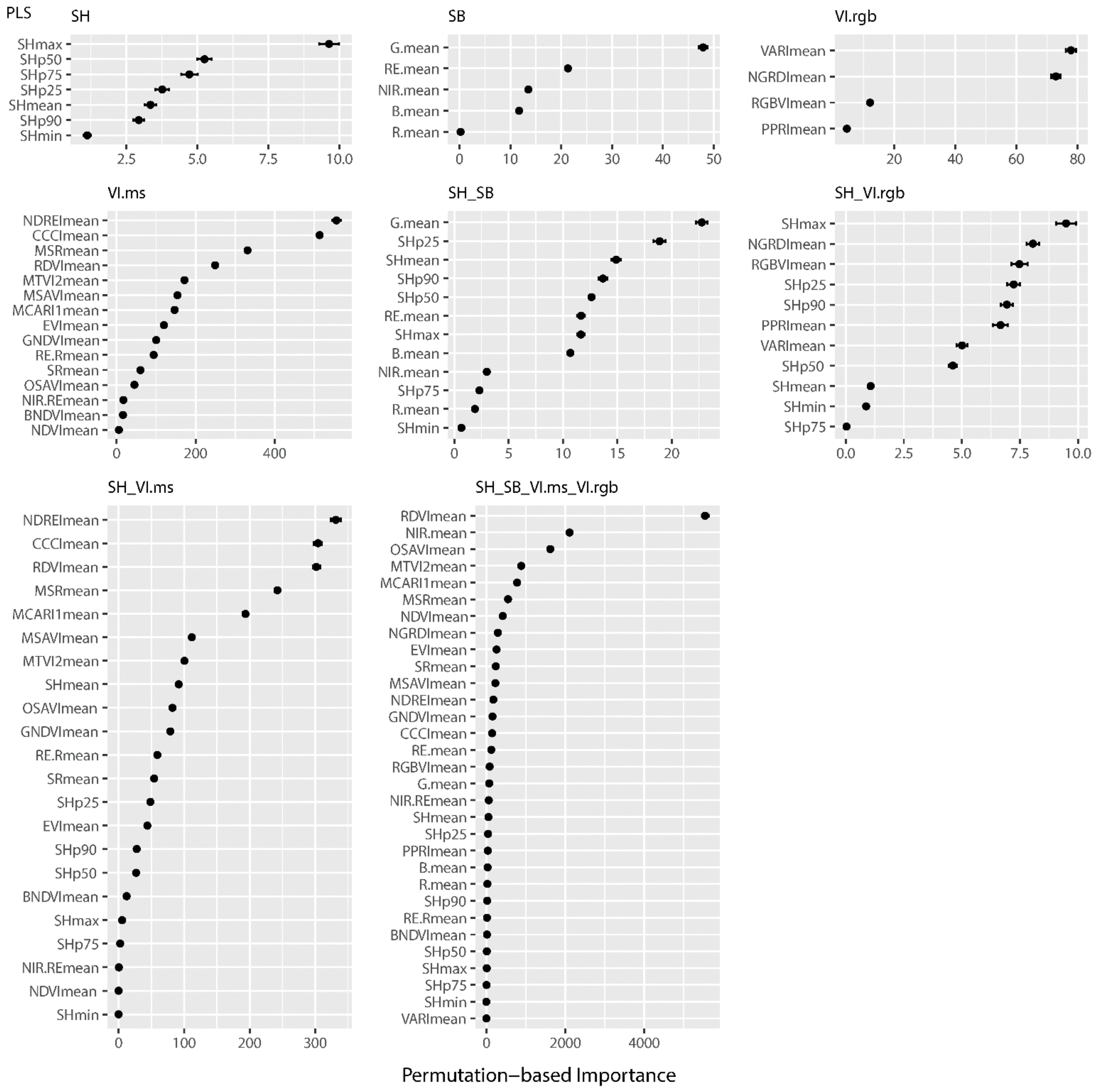
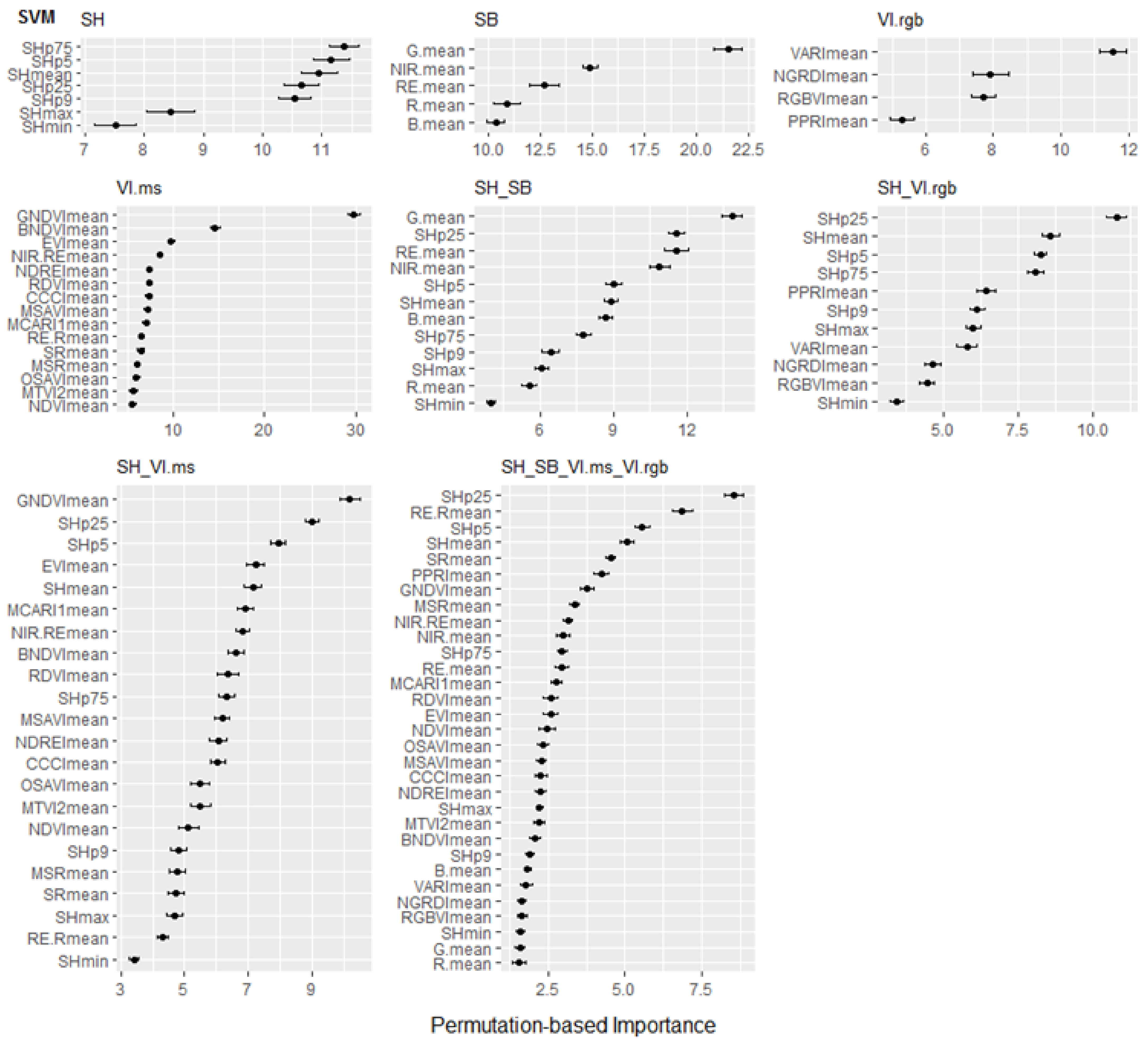
- To identify potential key variables (most important features) for the estimation models.
2. Materials and Methods
2.1. Study Site
2.2. Sensors and Platform
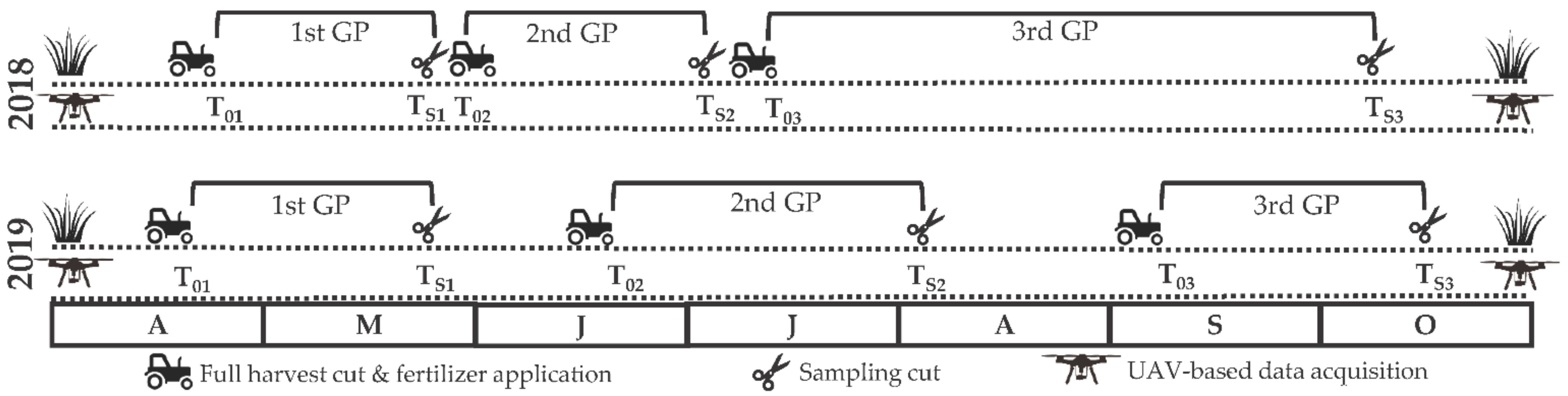
2.3. UAV-Based Data Acquisition
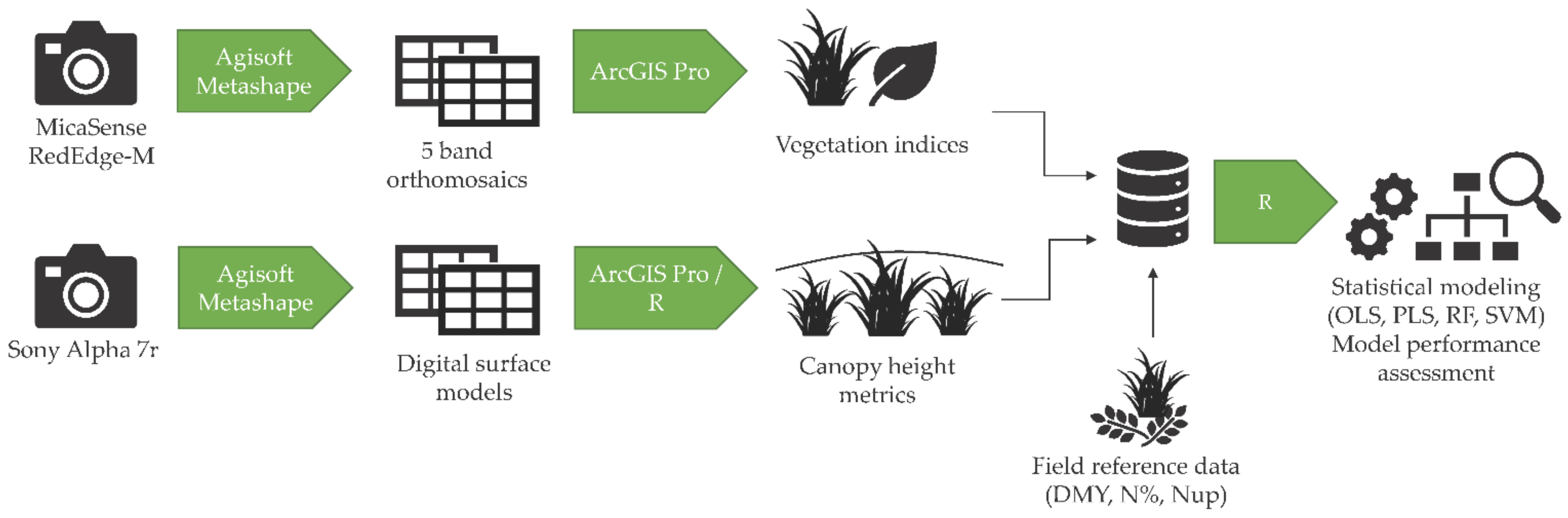
2.4. UAV-Based Data Processing and Feature Extraction
2.5. Statistical Analysis
Hyperparameter Tuning and Model Assessment
3. Results
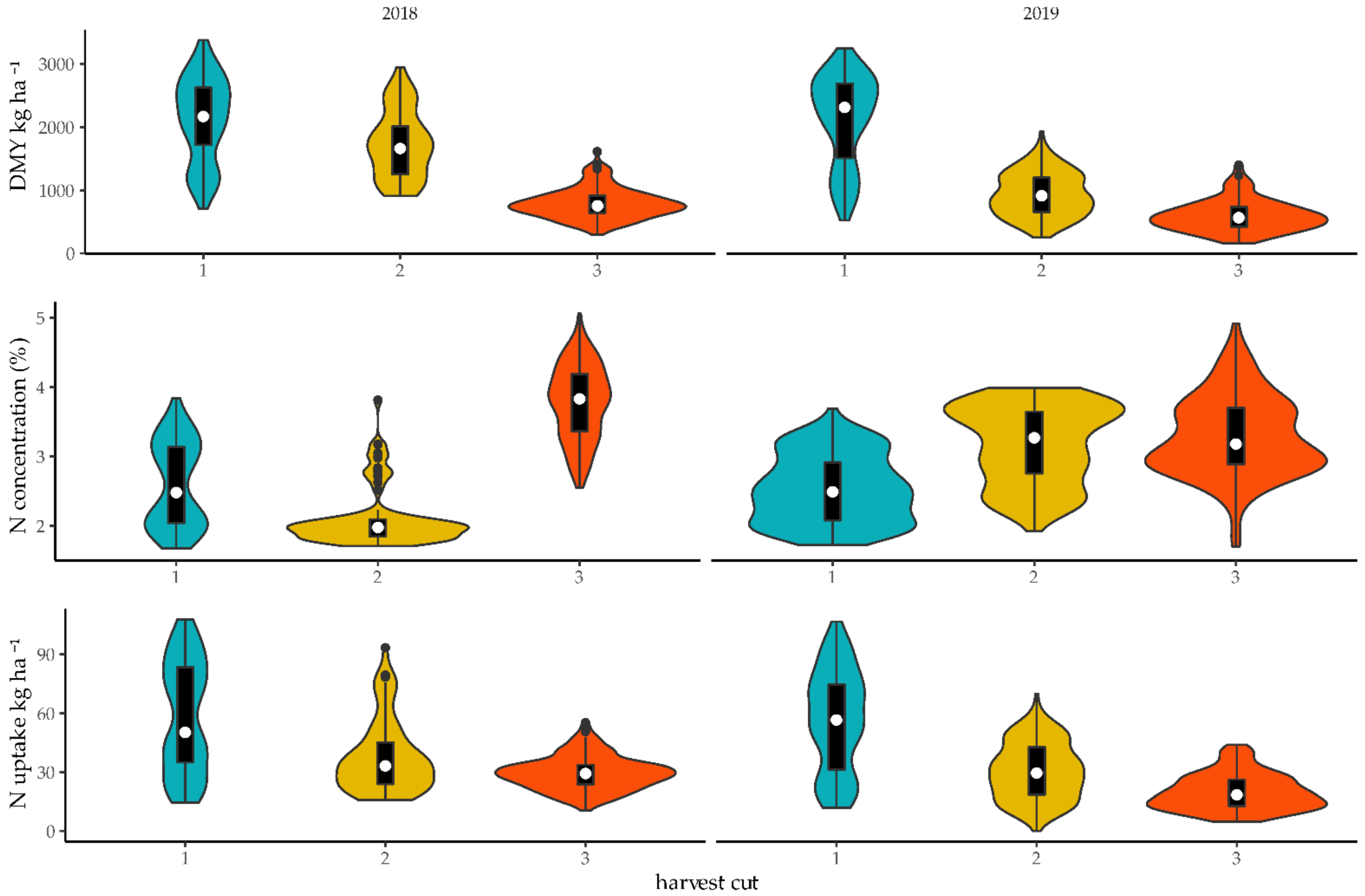
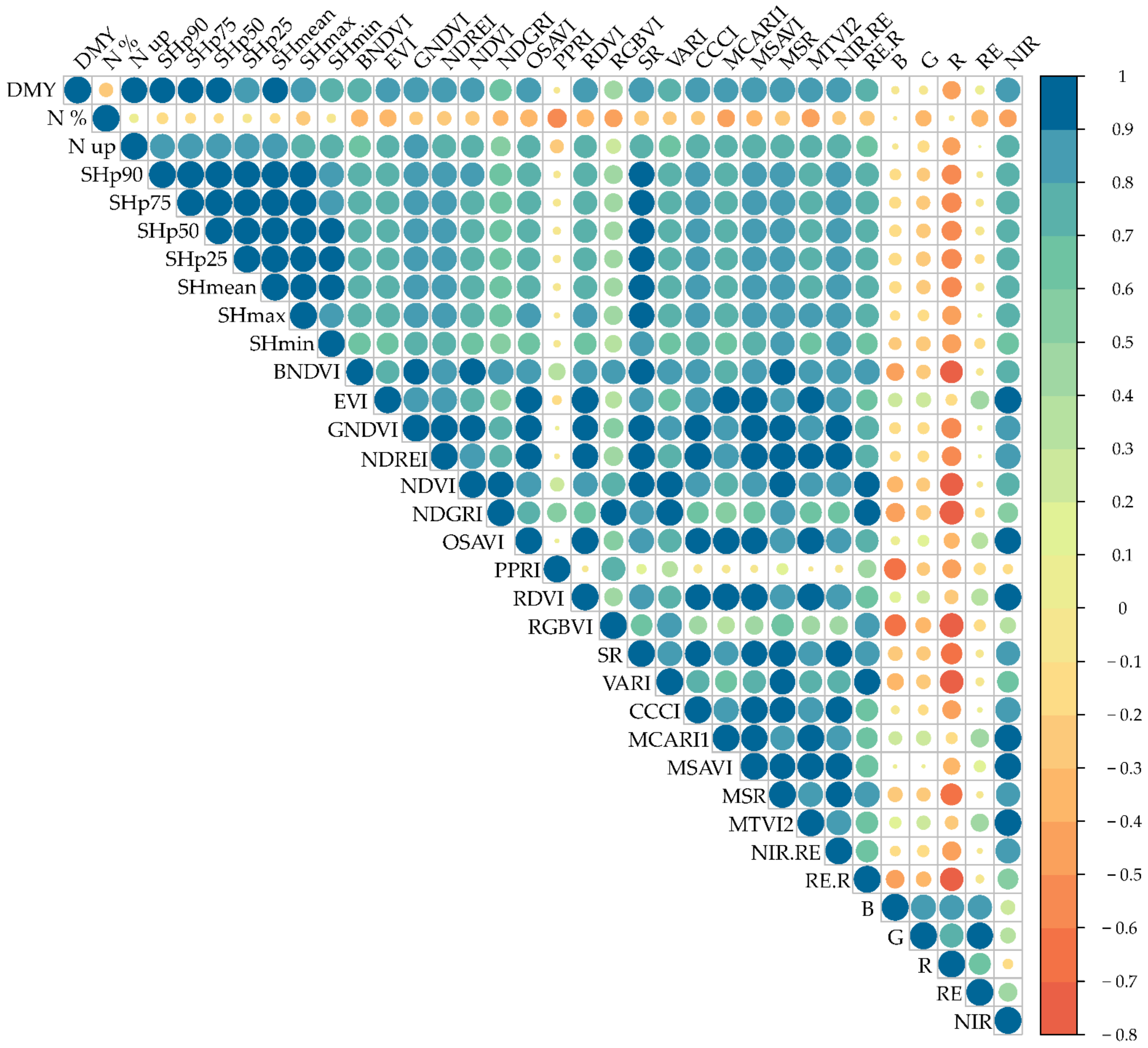
3.1. Distribution of Response Variables and Correlation Analysis
3.2. Error Assessment of SfM/MVS Processing
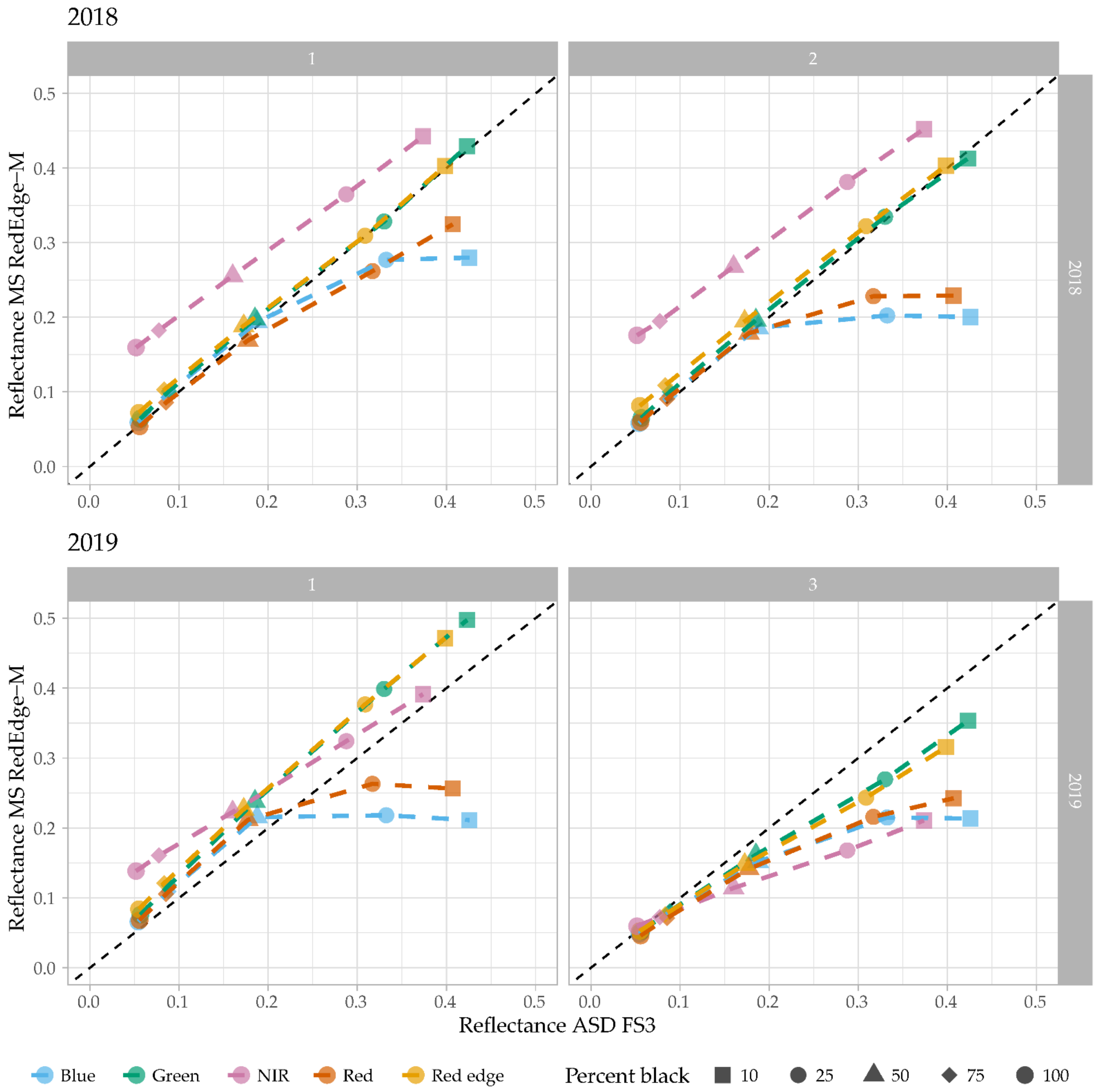
3.3. Radiometric Assessment MS Camera
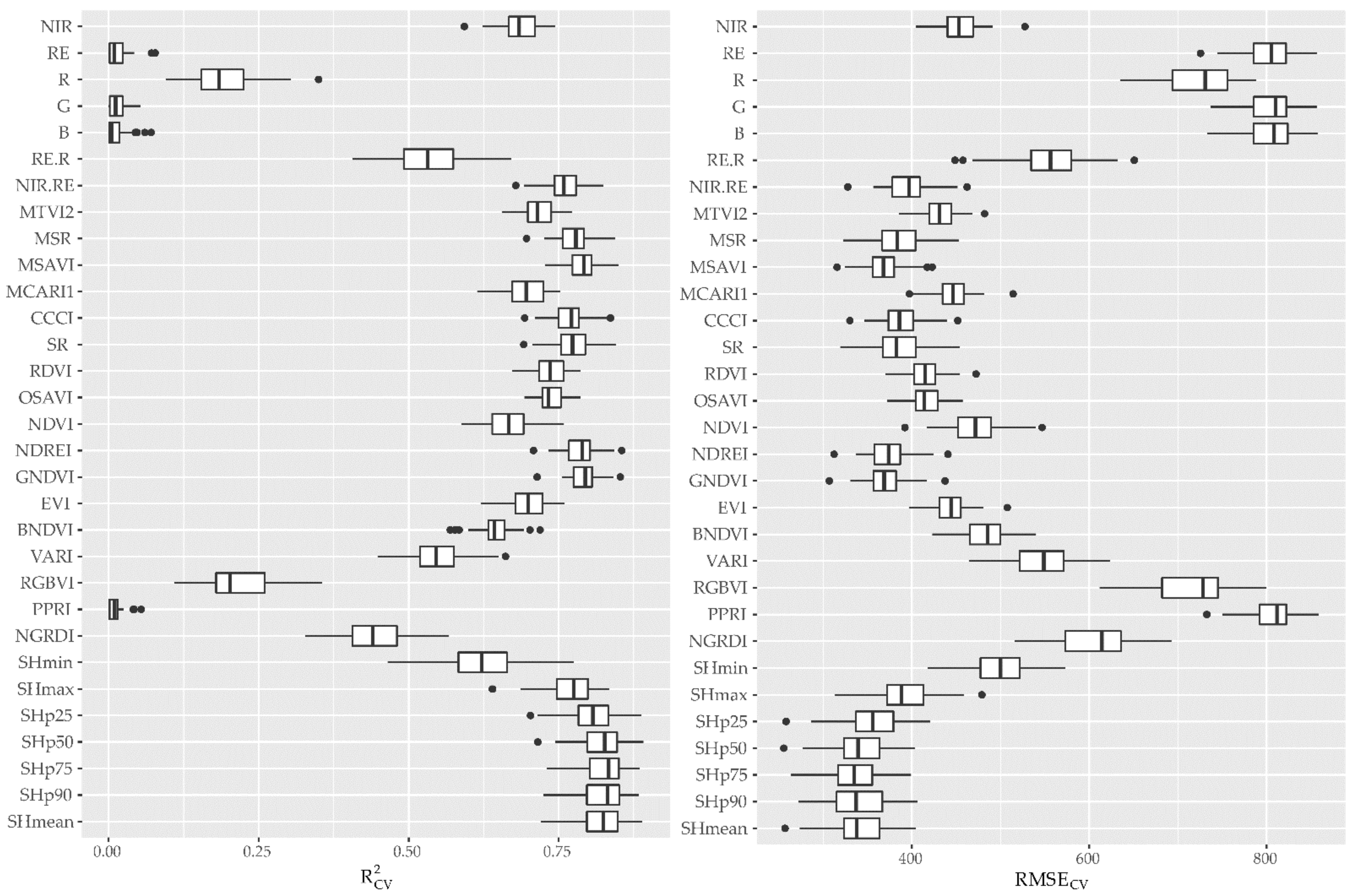
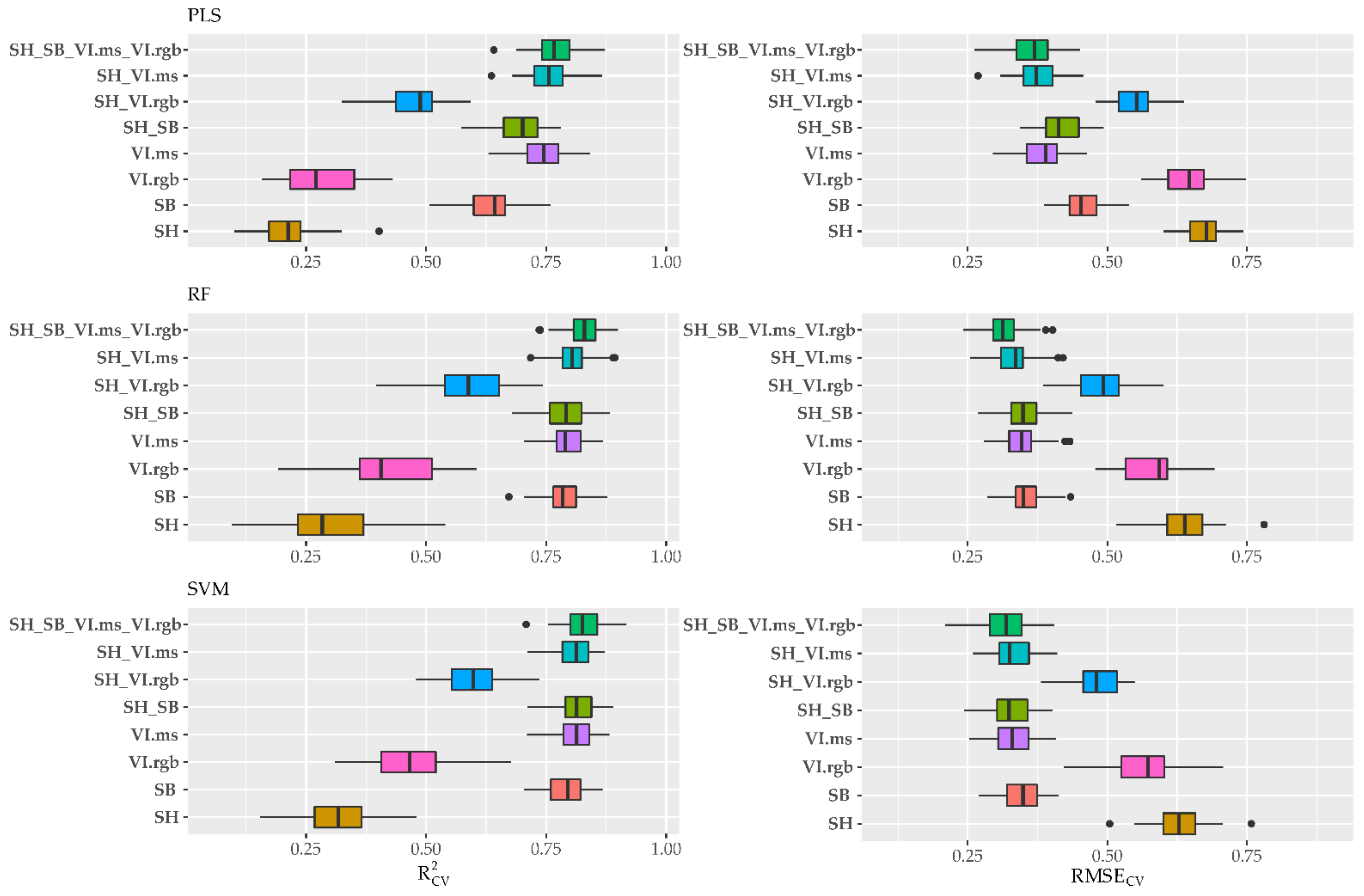
3.4. Dry Matter Yield Prediction
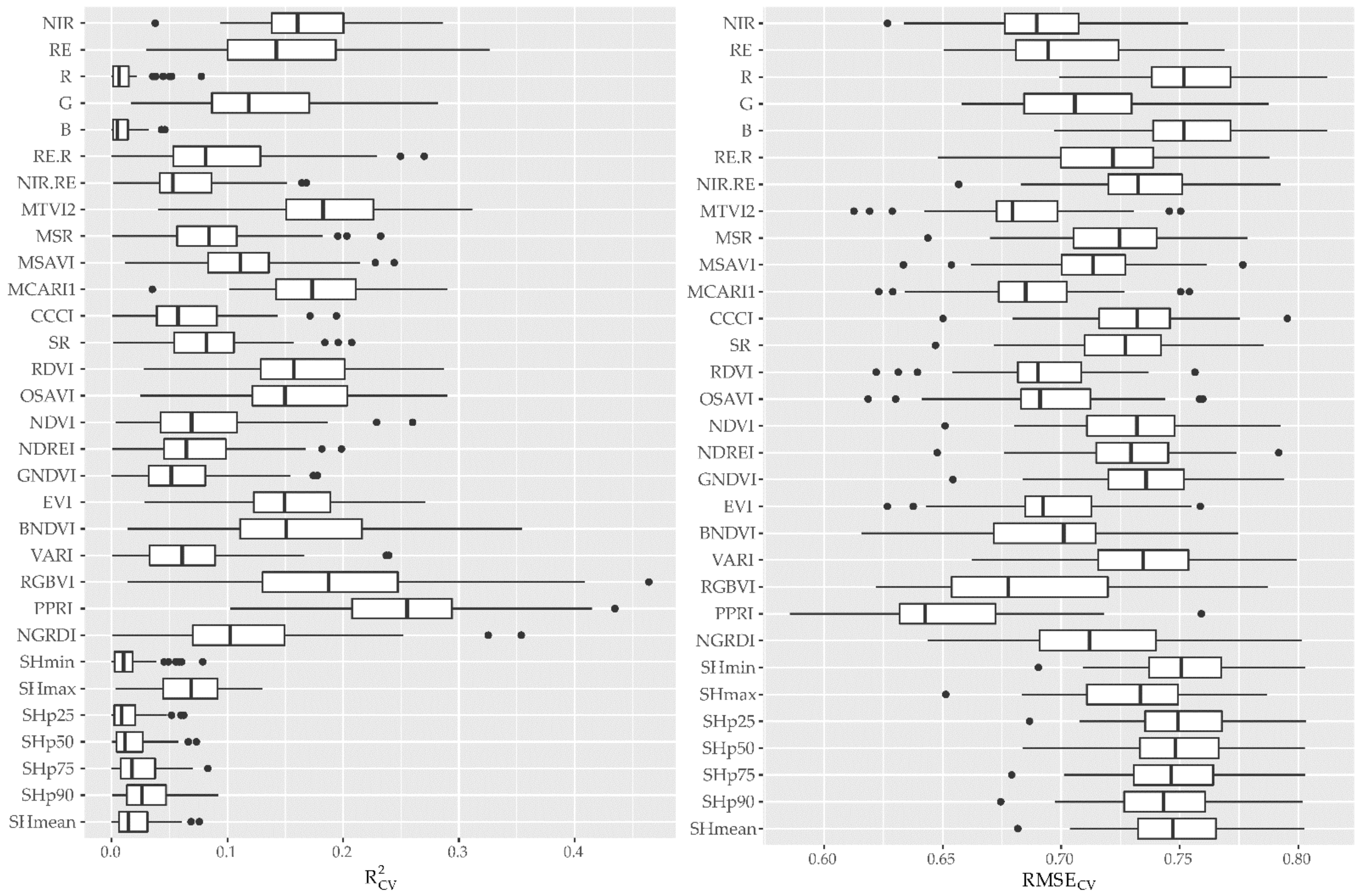
3.5. N-Concentration Prediction
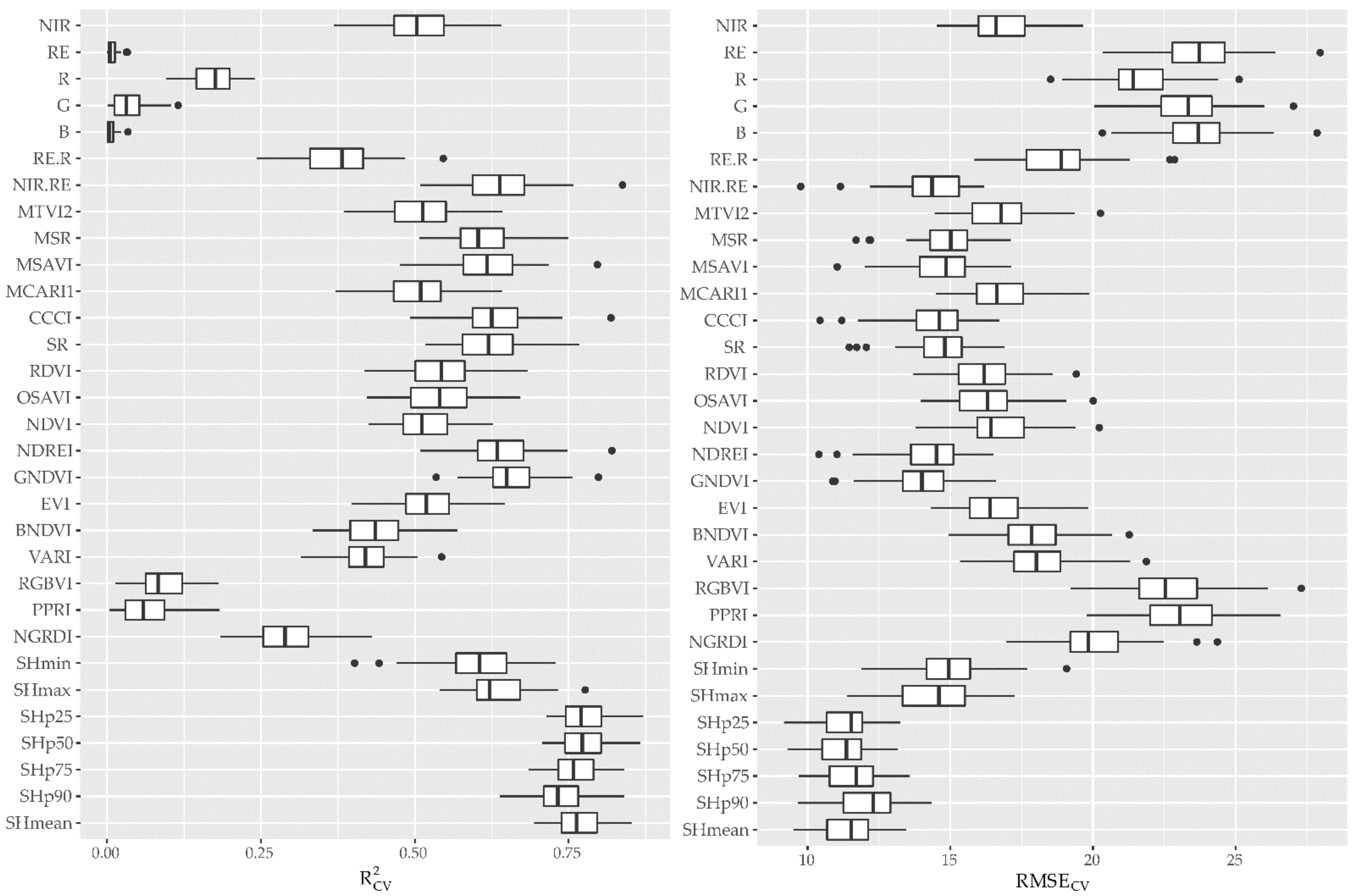
3.6. N Uptake Prediction
3.7. Models with Reduced Features
4. Discussion
4.1. Data Accuracy
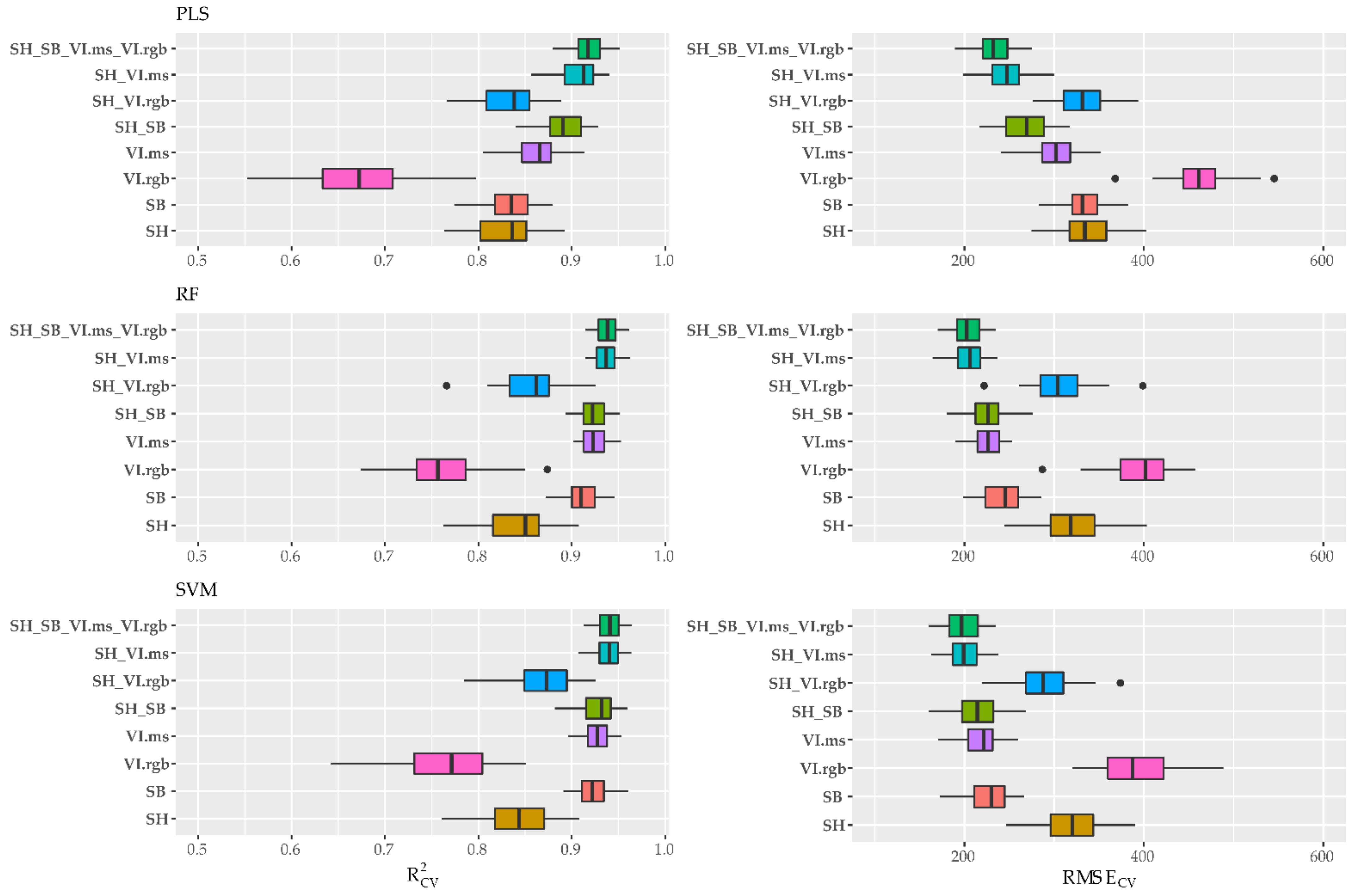
4.2. Impact of Combining Structural and Spectral Data on Predictive Performance
4.3. Transferability and Generality of Models
5. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DMY kg ha⁻¹ | N % Biomass | N up kg ha⁻¹ | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Feature | R2 | sd | RMSE | sd | R2 | sd | RMSE | sd | R2 | sd | RMSE | sd | ||||||
| SHmean | 0.82 | ± | 0.04 | 342 | ± | 31 | 0.02 | ± | 0.02 | 0.75 | ± | 0.02 | 0.77 | ± | 0.04 | 11.5 | ± | 1.0 |
| SHp90 | 0.82 | ± | 0.04 | 341 | ± | 32 | 0.03 | ± | 0.02 | 0.74 | ± | 0.03 | 0.74 | ± | 0.04 | 12.2 | ± | 1.1 |
| SHp75 | 0.83 | ± | 0.04 | 337 | ± | 30 | 0.02 | ± | 0.02 | 0.75 | ± | 0.02 | 0.76 | ± | 0.04 | 11.6 | ± | 1.0 |
| SHp50 | 0.82 | ± | 0.04 | 342 | ± | 31 | 0.02 | ± | 0.02 | 0.75 | ± | 0.02 | 0.78 | ± | 0.04 | 11.3 | ± | 0.9 |
| SHp25 | 0.81 | ± | 0.04 | 357 | ± | 32 | 0.02 | ± | 0.02 | 0.75 | ± | 0.02 | 0.77 | ± | 0.04 | 11.3 | ± | 0.9 |
| SHmax | 0.77 | ± | 0.04 | 391 | ± | 33 | 0.07 | ± | 0.03 | 0.73 | ± | 0.03 | 0.63 | ± | 0.05 | 14.4 | ± | 1.3 |
| SHmin | 0.62 | ± | 0.06 | 497 | ± | 36 | 0.02 | ± | 0.02 | 0.75 | ± | 0.02 | 0.61 | ± | 0.07 | 14.9 | ± | 1.5 |
| NGRDI | 0.44 | ± | 0.05 | 606 | ± | 40 | 0.11 | ± | 0.07 | 0.72 | ± | 0.03 | 0.29 | ± | 0.05 | 20.1 | ± | 1.5 |
| PPRI | 0.01 | ± | 0.01 | 807 | ± | 28 | 0.26 | ± | 0.07 | 0.65 | ± | 0.03 | 0.07 | ± | 0.05 | 23.1 | ± | 1.6 |
| RGBVI | 0.22 | ± | 0.05 | 717 | ± | 40 | 0.20 | ± | 0.10 | 0.69 | ± | 0.04 | 0.09 | ± | 0.04 | 22.7 | ± | 1.6 |
| VARI | 0.55 | ± | 0.05 | 546 | ± | 36 | 0.07 | ± | 0.05 | 0.73 | ± | 0.03 | 0.42 | ± | 0.05 | 18.2 | ± | 1.4 |
| BNDVI | 0.64 | ± | 0.03 | 485 | ± | 25 | 0.16 | ± | 0.08 | 0.70 | ± | 0.03 | 0.44 | ± | 0.06 | 17.9 | ± | 1.2 |
| EVI | 0.70 | ± | 0.03 | 445 | ± | 21 | 0.16 | ± | 0.05 | 0.70 | ± | 0.03 | 0.52 | ± | 0.06 | 16.5 | ± | 1.3 |
| GNDVI | 0.79 | ± | 0.02 | 370 | ± | 23 | 0.06 | ± | 0.04 | 0.73 | ± | 0.03 | 0.65 | ± | 0.05 | 14.1 | ± | 1.3 |
| NDREI | 0.79 | ± | 0.03 | 374 | ± | 24 | 0.07 | ± | 0.04 | 0.73 | ± | 0.03 | 0.64 | ± | 0.06 | 14.3 | ± | 1.3 |
| NDVI | 0.67 | ± | 0.04 | 470 | ± | 31 | 0.08 | ± | 0.06 | 0.73 | ± | 0.03 | 0.52 | ± | 0.05 | 16.7 | ± | 1.3 |
| OSAVI | 0.74 | ± | 0.02 | 415 | ± | 20 | 0.16 | ± | 0.06 | 0.69 | ± | 0.03 | 0.54 | ± | 0.06 | 16.2 | ± | 1.3 |
| RDVI | 0.74 | ± | 0.03 | 416 | ± | 20 | 0.16 | ± | 0.05 | 0.69 | ± | 0.03 | 0.54 | ± | 0.06 | 16.1 | ± | 1.3 |
| SR | 0.78 | ± | 0.03 | 384 | ± | 28 | 0.08 | ± | 0.05 | 0.73 | ± | 0.03 | 0.62 | ± | 0.06 | 14.7 | ± | 1.2 |
| CCCI | 0.77 | ± | 0.03 | 389 | ± | 24 | 0.07 | ± | 0.04 | 0.73 | ± | 0.03 | 0.63 | ± | 0.06 | 14.5 | ± | 1.3 |
| MCARI1 | 0.70 | ± | 0.03 | 447 | ± | 22 | 0.18 | ± | 0.05 | 0.69 | ± | 0.03 | 0.51 | ± | 0.06 | 16.7 | ± | 1.3 |
| MSAVI | 0.79 | ± | 0.03 | 369 | ± | 23 | 0.11 | ± | 0.05 | 0.71 | ± | 0.03 | 0.62 | ± | 0.06 | 14.7 | ± | 1.3 |
| MSR | 0.78 | ± | 0.03 | 383 | ± | 27 | 0.09 | ± | 0.05 | 0.72 | ± | 0.03 | 0.61 | ± | 0.05 | 14.9 | ± | 1.2 |
| MTVI2 | 0.72 | ± | 0.03 | 431 | ± | 20 | 0.19 | ± | 0.05 | 0.68 | ± | 0.03 | 0.51 | ± | 0.06 | 16.6 | ± | 1.3 |
| NIR.RE | 0.76 | ± | 0.03 | 397 | ± | 26 | 0.06 | ± | 0.04 | 0.73 | ± | 0.03 | 0.64 | ± | 0.06 | 14.3 | ± | 1.3 |
| RE.R | 0.53 | ± | 0.07 | 554 | ± | 47 | 0.10 | ± | 0.06 | 0.72 | ± | 0.03 | 0.38 | ± | 0.06 | 18.8 | ± | 1.5 |
| B | 0.01 | ± | 0.02 | 805 | ± | 31 | 0.01 | ± | 0.01 | 0.75 | ± | 0.02 | 0.01 | ± | 0.01 | 23.7 | ± | 1.6 |
| G | 0.02 | ± | 0.02 | 804 | ± | 30 | 0.13 | ± | 0.06 | 0.71 | ± | 0.03 | 0.04 | ± | 0.03 | 23.4 | ± | 1.6 |
| R | 0.20 | ± | 0.05 | 726 | ± | 39 | 0.01 | ± | 0.02 | 0.75 | ± | 0.02 | 0.18 | ± | 0.03 | 21.6 | ± | 1.4 |
| RE | 0.02 | ± | 0.02 | 804 | ± | 29 | 0.15 | ± | 0.06 | 0.70 | ± | 0.03 | 0.01 | ± | 0.01 | 23.7 | ± | 1.6 |
| NIR | 0.69 | ± | 0.03 | 455 | ± | 24 | 0.17 | ± | 0.05 | 0.69 | ± | 0.03 | 0.51 | ± | 0.06 | 16.7 | ± | 1.2 |
| R2 | RMSE kg ha⁻¹ | nRMSE % | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Modelname | Hyperparameters | Median | iqr | Mean | sd | Median | iqr | Mean | sd | Median | iqr | Mean | sd | |||||||
| PLS | SH | ncomp = 3 | 0.84 | ± | 0.05 | 0.83 | ± | 0.04 | 334 | ± | 41 | 336 | ± | 31 | 25.1 | ± | 3.1 | 25.2 | ± | 2.3 |
| SB | ncomp = 4 | 0.84 | ± | 0.04 | 0.83 | ± | 0.02 | 331 | ± | 28 | 331 | ± | 23 | 24.9 | ± | 2.1 | 24.9 | ± | 1.7 | |
| VI.rgb | ncomp = 3 | 0.67 | ± | 0.08 | 0.67 | ± | 0.05 | 461 | ± | 35 | 465 | ± | 35 | 34.6 | ± | 2.6 | 34.9 | ± | 2.6 | |
| VI.ms | ncomp = 14 | 0.87 | ± | 0.03 | 0.86 | ± | 0.02 | 302 | ± | 31 | 302 | ± | 24 | 22.7 | ± | 2.3 | 22.6 | ± | 1.8 | |
| SH_SB | ncomp = 11 | 0.89 | ± | 0.03 | 0.89 | ± | 0.02 | 269 | ± | 43 | 269 | ± | 25 | 20.2 | ± | 3.2 | 20.2 | ± | 1.9 | |
| SH_VI.rgb | ncomp = 5 | 0.84 | ± | 0.05 | 0.83 | ± | 0.03 | 331 | ± | 41 | 333 | ± | 30 | 24.9 | ± | 3.1 | 25.0 | ± | 2.2 | |
| SH_VI.ms | ncomp = 18 | 0.91 | ± | 0.03 | 0.91 | ± | 0.02 | 247 | ± | 30 | 247 | ± | 24 | 18.6 | ± | 2.2 | 18.6 | ± | 1.8 | |
| SH_SB_VI.ms_VI.rgb | ncomp = 29 | 0.92 | ± | 0.02 | 0.92 | ± | 0.02 | 232 | ± | 27 | 232 | ± | 21 | 17.4 | ± | 2.0 | 17.5 | ± | 1.6 | |
| RF | SH | mtry = 2 | 0.85 | ± | 0.05 | 0.84 | ± | 0.03 | 319 | ± | 49 | 320 | ± | 32 | 23.9 | ± | 3.7 | 24.0 | ± | 2.4 |
| SB | mtry = 4 | 0.91 | ± | 0.02 | 0.91 | ± | 0.02 | 245 | ± | 37 | 242 | ± | 22 | 18.4 | ± | 2.8 | 18.2 | ± | 1.7 | |
| VI.rgb | mtry = 2 | 0.76 | ± | 0.05 | 0.76 | ± | 0.04 | 402 | ± | 48 | 395 | ± | 37 | 30.2 | ± | 3.6 | 29.7 | ± | 2.8 | |
| VI.ms | mtry = 15 | 0.92 | ± | 0.02 | 0.92 | ± | 0.01 | 226 | ± | 24 | 225 | ± | 18 | 17.0 | ± | 1.8 | 16.9 | ± | 1.3 | |
| SH_SB | mtry = 12 | 0.92 | ± | 0.02 | 0.92 | ± | 0.01 | 226 | ± | 26 | 227 | ± | 21 | 17.0 | ± | 1.9 | 17.1 | ± | 1.5 | |
| SH_VI.rgb | mtry = 3 | 0.86 | ± | 0.04 | 0.86 | ± | 0.03 | 304 | ± | 41 | 306 | ± | 32 | 22.8 | ± | 3.1 | 23.0 | ± | 2.4 | |
| SH_VI.ms | mtry = 8 | 0.94 | ± | 0.02 | 0.94 | ± | 0.01 | 206 | ± | 25 | 205 | ± | 17 | 15.5 | ± | 1.9 | 15.4 | ± | 1.3 | |
| SH_SB_VI.ms_VI.rgb | mtry = 12 | 0.94 | ± | 0.02 | 0.94 | ± | 0.01 | 203 | ± | 25 | 203 | ± | 17 | 15.2 | ± | 1.9 | 15.2 | ± | 1.3 | |
| SVM | SH | C = 0.5, sigma = 1.62 | 0.84 | ± | 0.05 | 0.84 | ± | 0.03 | 320 | ± | 48 | 320 | ± | 32 | 24.1 | ± | 3.6 | 24.0 | ± | 2.4 |
| SB | C = 4, sigma = 0.62 | 0.92 | ± | 0.02 | 0.92 | ± | 0.02 | 230 | ± | 34 | 226 | ± | 22 | 17.3 | ± | 2.6 | 17.0 | ± | 1.6 | |
| VI.rgb | C = 4, sigma = 0.95 | 0.77 | ± | 0.07 | 0.77 | ± | 0.05 | 388 | ± | 62 | 393 | ± | 42 | 29.1 | ± | 4.7 | 29.5 | ± | 3.2 | |
| VI.ms | C = 4, sigma = 0.24 | 0.93 | ± | 0.02 | 0.93 | ± | 0.02 | 221 | ± | 27 | 219 | ± | 21 | 16.6 | ± | 2.0 | 16.4 | ± | 1.6 | |
| SH_SB | C = 4, sigma = 0.24 | 0.93 | ± | 0.03 | 0.93 | ± | 0.02 | 214 | ± | 35 | 215 | ± | 24 | 16.1 | ± | 2.6 | 16.2 | ± | 1.8 | |
| SH_VI.rgb | C = 4, sigma = 0.27 | 0.87 | ± | 0.05 | 0.87 | ± | 0.03 | 288 | ± | 42 | 290 | ± | 33 | 21.6 | ± | 3.1 | 21.8 | ± | 2.5 | |
| SH_VI.ms | C = 2, sigma = 0.16 | 0.94 | ± | 0.02 | 0.94 | ± | 0.01 | 199 | ± | 27 | 200 | ± | 19 | 14.9 | ± | 2.0 | 15.0 | ± | 1.4 | |
| SH_SB_VI.ms_VI.rgb | C = 4, sigma = 0.07 | 0.94 | ± | 0.02 | 0.94 | ± | 0.01 | 197 | ± | 32 | 198 | ± | 20 | 14.8 | ± | 2.4 | 14.9 | ± | 1.5 | |
| R2 | RMSE N % | nRMSE % | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Modelname | Hyperparameters | Median | iqr | Mean | sd | Median | iqr | Mean | sd | Median | iqr | Mean | sd | |||||||
| PLS | SH | ncomp = 3 | 0.21 | ± | 0.07 | 0.21 | ± | 0.06 | 0.68 | ± | 0.05 | 0.67 | ± | 0.03 | 22.6 | ± | 1.5 | 22.4 | ± | 1.1 |
| SB | ncomp = 4 | 0.64 | ± | 0.07 | 0.63 | ± | 0.05 | 0.45 | ± | 0.05 | 0.46 | ± | 0.04 | 15.1 | ± | 1.6 | 15.3 | ± | 1.2 | |
| VI.rgb | ncomp = 3 | 0.27 | ± | 0.13 | 0.28 | ± | 0.08 | 0.65 | ± | 0.06 | 0.64 | ± | 0.04 | 21.5 | ± | 2.1 | 21.4 | ± | 1.5 | |
| VI.ms | ncomp = 14 | 0.75 | ± | 0.06 | 0.74 | ± | 0.05 | 0.39 | ± | 0.05 | 0.39 | ± | 0.04 | 13.0 | ± | 1.8 | 12.9 | ± | 1.3 | |
| SH_SB | ncomp = 10 | 0.70 | ± | 0.07 | 0.70 | ± | 0.05 | 0.41 | ± | 0.06 | 0.42 | ± | 0.04 | 13.7 | ± | 2.0 | 13.9 | ± | 1.2 | |
| SH_VI.rgb | ncomp = 10 | 0.49 | ± | 0.08 | 0.47 | ± | 0.06 | 0.55 | ± | 0.05 | 0.55 | ± | 0.04 | 18.4 | ± | 1.8 | 18.3 | ± | 1.3 | |
| SH_VI.ms | ncomp = 21 | 0.76 | ± | 0.06 | 0.75 | ± | 0.05 | 0.37 | ± | 0.05 | 0.38 | ± | 0.04 | 12.4 | ± | 1.7 | 12.5 | ± | 1.3 | |
| SH_SB_VI.ms_VI.rgb | ncomp = 30 | 0.77 | ± | 0.06 | 0.76 | ± | 0.05 | 0.37 | ± | 0.06 | 0.37 | ± | 0.04 | 12.3 | ± | 1.9 | 12.3 | ± | 1.3 | |
| RF | SH | mtry = 7 | 0.28 | ± | 0.14 | 0.30 | ± | 0.09 | 0.64 | ± | 0.06 | 0.63 | ± | 0.05 | 21.3 | ± | 2.1 | 21.2 | ± | 1.7 |
| SB | mtry = 5 | 0.78 | ± | 0.05 | 0.78 | ± | 0.04 | 0.35 | ± | 0.04 | 0.35 | ± | 0.03 | 11.7 | ± | 1.2 | 11.8 | ± | 1.0 | |
| VI.rgb | mtry = 2 | 0.41 | ± | 0.15 | 0.43 | ± | 0.10 | 0.59 | ± | 0.07 | 0.58 | ± | 0.05 | 19.8 | ± | 2.5 | 19.2 | ± | 1.8 | |
| VI.ms | mtry = 15 | 0.79 | ± | 0.05 | 0.79 | ± | 0.04 | 0.35 | ± | 0.04 | 0.35 | ± | 0.03 | 11.6 | ± | 1.3 | 11.6 | ± | 1.1 | |
| SH_SB | mtry = 12 | 0.79 | ± | 0.07 | 0.79 | ± | 0.05 | 0.35 | ± | 0.05 | 0.35 | ± | 0.03 | 11.6 | ± | 1.5 | 11.7 | ± | 1.1 | |
| SH_VI.rgb | mtry = 11 | 0.59 | ± | 0.11 | 0.59 | ± | 0.07 | 0.49 | ± | 0.07 | 0.49 | ± | 0.04 | 16.4 | ± | 2.2 | 16.3 | ± | 1.5 | |
| SH_VI.ms | mtry = 22 | 0.80 | ± | 0.04 | 0.81 | ± | 0.04 | 0.34 | ± | 0.04 | 0.34 | ± | 0.04 | 11.2 | ± | 1.3 | 11.2 | ± | 1.2 | |
| SH_SB_VI.ms_VI.rgb | mtry = 30 | 0.83 | ± | 0.05 | 0.83 | ± | 0.04 | 0.31 | ± | 0.04 | 0.32 | ± | 0.03 | 10.4 | ± | 1.2 | 10.5 | ± | 1.1 | |
| SVM | SH | C = 0.5, sigma = 1.80 | 0.32 | ± | 0.10 | 0.32 | ± | 0.08 | 0.63 | ± | 0.06 | 0.63 | ± | 0.05 | 20.9 | ± | 1.9 | 21.0 | ± | 1.6 |
| SB | C = 4, sigma = 0.51 | 0.79 | ± | 0.06 | 0.79 | ± | 0.04 | 0.35 | ± | 0.05 | 0.35 | ± | 0.04 | 11.6 | ± | 1.8 | 11.5 | ± | 1.2 | |
| VI.rgb | C = 4, sigma = 0.89 | 0.47 | ± | 0.11 | 0.47 | ± | 0.09 | 0.57 | ± | 0.08 | 0.57 | ± | 0.06 | 19.1 | ± | 2.6 | 18.9 | ± | 2.1 | |
| VI.ms | C = 4, sigma = 0.27 | 0.81 | ± | 0.05 | 0.81 | ± | 0.04 | 0.33 | ± | 0.05 | 0.33 | ± | 0.04 | 11.0 | ± | 1.8 | 11.0 | ± | 1.3 | |
| SH_SB | C = 4, sigma = 0.19 | 0.81 | ± | 0.05 | 0.81 | ± | 0.04 | 0.32 | ± | 0.05 | 0.33 | ± | 0.04 | 10.8 | ± | 1.8 | 10.9 | ± | 1.2 | |
| SH_VI.rgb | C = 4, sigma = 0.31 | 0.60 | ± | 0.08 | 0.60 | ± | 0.06 | 0.48 | ± | 0.06 | 0.48 | ± | 0.04 | 16.0 | ± | 2.0 | 16.0 | ± | 1.5 | |
| SH_VI.ms | C = 4, sigma = 0.17 | 0.81 | ± | 0.05 | 0.81 | ± | 0.04 | 0.32 | ± | 0.05 | 0.33 | ± | 0.04 | 10.8 | ± | 1.8 | 11.0 | ± | 1.2 | |
| SH_SB_VI.ms_VI.rgb | C = 4, sigma = 0.07 | 0.83 | ± | 0.06 | 0.83 | ± | 0.04 | 0.32 | ± | 0.06 | 0.32 | ± | 0.04 | 10.6 | ± | 1.9 | 10.6 | ± | 1.3 | |
| R2 | RMSE kg ha⁻¹ | nRMSE % | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Modelname | Hyperparameters | Median | iqr | Mean | sd | Median | iqr | Mean | sd | Median | iqr | Mean | sd | |||||||
| PLS | SH | ncomp = 3 | 0.79 | ± | 0.06 | 0.79 | ± | 0.05 | 11.0 | ± | 1.3 | 10.9 | ± | 1.2 | 28.6 | ± | 3.5 | 28.3 | ± | 3.1 |
| SB | ncomp = 4 | 0.78 | ± | 0.05 | 0.77 | ± | 0.04 | 11.3 | ± | 1.3 | 11.4 | ± | 0.9 | 29.4 | ± | 3.5 | 29.7 | ± | 2.5 | |
| VI.rgb | ncomp = 3 | 0.67 | ± | 0.04 | 0.67 | ± | 0.04 | 13.6 | ± | 1.2 | 13.8 | ± | 1.1 | 35.5 | ± | 3.0 | 36.0 | ± | 2.8 | |
| VI.ms | ncomp = 14 | 0.81 | ± | 0.04 | 0.81 | ± | 0.03 | 10.4 | ± | 1.3 | 10.4 | ± | 0.9 | 27.0 | ± | 3.4 | 27.0 | ± | 2.4 | |
| SH_SB | ncomp = 9 | 0.86 | ± | 0.04 | 0.86 | ± | 0.04 | 9.2 | ± | 1.4 | 9.1 | ± | 1.2 | 23.9 | ± | 3.6 | 23.6 | ± | 3.2 | |
| SH_VI.rgb | ncomp = 7 | 0.83 | ± | 0.05 | 0.83 | ± | 0.04 | 9.9 | ± | 1.3 | 9.8 | ± | 1.2 | 25.8 | ± | 3.4 | 25.5 | ± | 3.2 | |
| SH_VI.ms | ncomp = 20 | 0.87 | ± | 0.04 | 0.87 | ± | 0.03 | 8.7 | ± | 1.3 | 8.6 | ± | 1.1 | 22.6 | ± | 3.4 | 22.4 | ± | 2.8 | |
| SH_SB_VI.ms_VI.rgb | ncomp = 29 | 0.88 | ± | 0.04 | 0.88 | ± | 0.03 | 8.2 | ± | 1.3 | 8.2 | ± | 1.1 | 21.4 | ± | 3.4 | 21.3 | ± | 2.8 | |
| RF | SH | mtry = 7 | 0.80 | ± | 0.05 | 0.80 | ± | 0.04 | 10.8 | ± | 0.9 | 10.7 | ± | 0.8 | 28.0 | ± | 2.5 | 27.9 | ± | 2.1 |
| SB | mtry = 5 | 0.87 | ± | 0.03 | 0.87 | ± | 0.03 | 8.6 | ± | 1.0 | 8.7 | ± | 0.9 | 22.4 | ± | 2.5 | 22.5 | ± | 2.4 | |
| VI.rgb | mtry = 2 | 0.77 | ± | 0.05 | 0.76 | ± | 0.05 | 11.7 | ± | 1.4 | 11.6 | ± | 1.2 | 30.5 | ± | 3.7 | 30.2 | ± | 3.0 | |
| VI.ms | mtry = 15 | 0.90 | ± | 0.03 | 0.89 | ± | 0.03 | 7.7 | ± | 1.5 | 7.8 | ± | 1.0 | 20.0 | ± | 3.8 | 20.3 | ± | 2.6 | |
| SH_SB | mtry = 12 | 0.88 | ± | 0.03 | 0.88 | ± | 0.03 | 8.3 | ± | 1.2 | 8.4 | ± | 0.9 | 21.7 | ± | 3.1 | 22.0 | ± | 2.3 | |
| SH_VI.rgb | mtry = 10 | 0.85 | ± | 0.05 | 0.85 | ± | 0.03 | 9.2 | ± | 1.5 | 9.2 | ± | 0.9 | 24.0 | ± | 4.0 | 24.0 | ± | 2.5 | |
| SH_VI.ms | mtry = 21 | 0.91 | ± | 0.03 | 0.91 | ± | 0.02 | 7.0 | ± | 1.1 | 7.1 | ± | 0.9 | 18.3 | ± | 3.0 | 18.5 | ± | 2.3 | |
| SH_SB_VI.ms_VI.rgb | mtry = 27 | 0.92 | ± | 0.03 | 0.92 | ± | 0.02 | 6.7 | ± | 1.1 | 6.9 | ± | 0.8 | 17.5 | ± | 2.7 | 17.9 | ± | 2.1 | |
| SVM | SH | C = 1, sigma = 1.62 | 0.80 | ± | 0.07 | 0.79 | ± | 0.05 | 10.9 | ± | 1.9 | 10.9 | ± | 1.2 | 28.4 | ± | 4.9 | 28.4 | ± | 3.0 |
| SB | C = 4, sigma = 0.62 | 0.89 | ± | 0.03 | 0.89 | ± | 0.02 | 8.0 | ± | 1.2 | 8.1 | ± | 0.9 | 20.8 | ± | 3.1 | 21.0 | ± | 2.4 | |
| VI.rgb | C = 4, sigma = 0.95 | 0.76 | ± | 0.05 | 0.77 | ± | 0.05 | 11.5 | ± | 1.4 | 11.6 | ± | 1.2 | 30.0 | ± | 3.6 | 30.1 | ± | 3.1 | |
| VI.ms | C = 4, sigma = 0.24 | 0.89 | ± | 0.03 | 0.89 | ± | 0.02 | 7.9 | ± | 1.4 | 7.9 | ± | 0.9 | 20.7 | ± | 3.6 | 20.6 | ± | 2.4 | |
| SH_SB | C = 4, sigma = 0.24 | 0.90 | ± | 0.04 | 0.90 | ± | 0.03 | 7.6 | ± | 1.4 | 7.6 | ± | 1.0 | 19.8 | ± | 3.6 | 19.9 | ± | 2.5 | |
| SH_VI.rgb | C = 2, sigma = 0.27 | 0.86 | ± | 0.05 | 0.86 | ± | 0.04 | 8.9 | ± | 1.5 | 9.0 | ± | 1.1 | 23.2 | ± | 3.9 | 23.5 | ± | 2.9 | |
| SH_VI.ms | C = 4, sigma = 0.16 | 0.91 | ± | 0.03 | 0.91 | ± | 0.02 | 7.1 | ± | 1.4 | 7.1 | ± | 0.9 | 18.4 | ± | 3.7 | 18.6 | ± | 2.4 | |
| SH_SB_VI.ms_VI.rgb | C = 4, sigma = 0.07 | 0.91 | ± | 0.03 | 0.91 | ± | 0.02 | 7.1 | ± | 1.0 | 7.1 | ± | 0.8 | 18.6 | ± | 2.7 | 18.5 | ± | 2.2 | |
| Wilcoxon Signed Rank Test | Significance Level adj. p-Value | ||||
|---|---|---|---|---|---|
| Model 1 | Model 2 | DMY | N% | Nup | |
| PLS | VI.ms | SH_VI.ms | **** | **** | **** |
| SB | SH_SB | **** | **** | **** | |
| VI.rgb | SH_VI.rgb | **** | **** | **** | |
| SH_VI.ms | SH_SB_VI.ms_VI.rgb | **** | **** | **** | |
| RF | VI.ms | SH_VI.ms | **** | *** | **** |
| SB | SH_SB | **** | ns | ns | |
| VI.rgb | SH_VI.rgb | **** | **** | **** | |
| SH_VI.ms | SH_SB_VI.ms_VI.rgb | ** | **** | **** | |
| SVM | VI.ms | SH_VI.ms | **** | ns | **** |
| SB | SH_SB | *** | **** | ** | |
| VI.rgb | SH_VI.rgb | **** | **** | **** | |
| SH_VI.ms | SH_SB_VI.ms_VI.rgb | ns | **** | ns | |









References
- Gibson, D.J. Grasses and Grassland Ecology; Oxford University Press: Oxford, UK, 2009; ISBN1 978-0-19-852918-7. ISBN2 978-0-19-852919-4. [Google Scholar]
- Velthof, G.L.; Lesschen, J.P.; Schils, R.L.M.; Smit, A.; Elbersen, B.S.; Hazeu, G.W.; Mucher, C.A.; Oenema, O. Final Report: Grassland Areas, Production and Use. Lot 2. Methodological Studies in the Field of Agro-Environmental Indicators; Wageningen Environmental Research: Wageningen, The Netherlands, 2014. [Google Scholar]
- Shalloo, L.; Byrne, T.; Leso, L.; Ruelle, E.; Starsmore, K.; Geoghegan, A.; Werner, J.; O’Leary, N. A review of precision technologies in pasture-based dairying systems. Ir. J. Agric. Food Res. 2021, 59, 279–291. [Google Scholar] [CrossRef]
- O’Mara, F.P. The role of grasslands in food security and climate change. Ann. Bot. 2012, 110, 1263–1270. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lugato, E.; Bampa, F.; Panagos, P.; Montanarella, L.; Jones, A. Potential carbon sequestration of European arable soils estimated by modelling a comprehensive set of management practices. Glob. Change Biol. 2014, 20, 3557–3567. [Google Scholar] [CrossRef] [Green Version]
- Eurostat. Agriculture, Forestry and Fishery Statistics 2020 Edition; Cook, E., Ed.; European Union: Luxembourg, 2020; ISBN 978-92-76-21522-6. [Google Scholar]
- Wilkins, P.W.; Humphreys, M.O. Progress in breeding perennial forage grasses for temperate agriculture. J. Agric. Sci. 2003, 140, 129–150. [Google Scholar] [CrossRef]
- Muñoz-Huerta, R.F.; Guevara-Gonzalez, R.G.; Contreras-Medina, L.M.; Torres-Pacheco, I.; Prado-Olivarez, J.; Ocampo-Velazquez, R.V. A review of methods for sensing the nitrogen status in plants: Advantages, disadvantages and recent advances. Sensors 2013, 13, 10823–10843. [Google Scholar] [CrossRef] [PubMed]
- Gastal, F.; Lemaire, G. N uptake and distribution in crops: An agronomical and ecophysiological perspective. J. Exp. Bot. 2002, 53, 789–799. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reyes, J.; Schellberg, J.; Siebert, S.; Elsaesser, M.; Adam, J.; Ewert, F. Improved estimation of nitrogen uptake in grasslands using the nitrogen dilution curve. Agron. Sustain. Dev. 2015, 35, 1561–1570. [Google Scholar] [CrossRef] [Green Version]
- Lesschen, J.P.; Elbersen, B.; Hazeu, G.; van Doorn, A.; Mucher, S.; Velthof, G. Task 1—Defining and Classifying Grasslands in Europe: Methodological Studies in the Field of Agro-Environmental Indicators Lot 2. Grassland Areas, Production and Use; Wageningen Environmental Research: Wageningen, The Netherlands, 2014. [Google Scholar]
- Higgins, S.; Schellberg, J.; Bailey, J.S. Improving productivity and increasing the efficiency of soil nutrient management on grassland farms in the UK and Ireland using precision agriculture technology. Eur. J. Agron. 2019, 106, 67–74. [Google Scholar] [CrossRef]
- Shalloo, L.; Donovan, M.O.; Leso, L.; Werner, J.; Ruelle, E.; Geoghegan, A.; Delaby, L.; Leary, N.O. Review: Grass-based dairy systems, data and precision technologies. Animal 2018, 12, S262–S271. [Google Scholar] [CrossRef] [Green Version]
- Balafoutis, A.; Beck, B.; Fountas, S.; Vangeyte, J.; Van Der Wal, T.; Soto, I.; Gómez-Barbero, M.; Barnes, A.; Eory, V. Precision agriculture technologies positively contributing to ghg emissions mitigation, farm productivity and economics. Sustainability 2017, 9, 1339. [Google Scholar] [CrossRef] [Green Version]
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Schellberg, J.; Hill, M.J.; Gerhards, R.; Rothmund, M.; Braun, M. Precision agriculture on grassland: Applications, perspectives and constraints. Eur. J. Agron. 2008, 29, 59–71. [Google Scholar] [CrossRef]
- Schellberg, J.; Möseler, B.M.; Kühbauch, W.; Rademacher, I.F. Long-term effects of fertilizer on soil nutrient concentration, yield, forage quality and floristic composition of a hay meadow in the Eifel mountains, Germany. Grass Forage Sci. 1999, 54, 195–207. [Google Scholar] [CrossRef]
- Ergon, A.; Kirwan, L.; Bleken, M.A.; Skjelvag, A.O.; Collins, R.P.; Rognli, O.A. Species interactions in a grassland mixture under low nitrogen fertilization and two cutting frequencies: 1. dry-matter yield and dynamics of species composition. Grass 2016, 71, 667–682. [Google Scholar] [CrossRef]
- Elgersma, A.; Søegaard, K. Changes in nutritive value and herbage yield during extended growth intervals in grass—Legume mixtures: Effects of species, maturity at harvest, and relationships between productivity and components of feed quality. Grass Forage Sci. 2017, 73, 78–93. [Google Scholar] [CrossRef]
- Duranovich, F.N.; Yule, I.J.; Lopez-Villalobos, N.; Shadbolt, N.M.; Draganova, I.; Morris, S.T. Using Proximal Hyperspectral Sensing to Predict Herbage Nutritive Value for Dairy Farming. Agronomy 2020, 10, 1826. [Google Scholar] [CrossRef]
- Catchpole, W.R.; Wheeler, C.H. Estimating plant biomass: A review of techniques. Aust. J. Ecol. 1992, 17, 121–131. [Google Scholar] [CrossRef]
- O´Donovan, M.; Dillon, P.; Rath, M.; Stakelum, G. A comparison of four methods of herbage mass estimation. Ir. J. Agric. Food Res. 2002, 41, 17–27. [Google Scholar] [CrossRef]
- Sanderson, M.A.; Rotz, C.A.; Fultz, S.W.; Rayburn, E.B. Estimating Forage mass with a Commercial Capacitance Meter, rising Plate Meter and Pasture Ruler. Agron. J. 2001, 93, 1281–1286. [Google Scholar] [CrossRef] [Green Version]
- Fricke, T.; Wachendorf, M. Combining ultrasonic sward height and spectral signatures to assess the biomass of legume-grass swards. Comput. Electron. Agric. 2013, 99, 236–247. [Google Scholar] [CrossRef]
- Legg, M.; Bradley, S. Ultrasonic Arrays for Remote Sensing of Pasture Biomass. Remote Sens. 2019, 12, 111. [Google Scholar] [CrossRef] [Green Version]
- Portz, G.; Gnyp, M.L.; Jasper, J. Capability of crop canopy sensing to predict crop parameters of cut grass swards aiming at early season variable rate nitrogen top dressings. Adv. Anim. Biosci. 2017, 8, 792–795. [Google Scholar] [CrossRef]
- Berry, P.M.; Holmes, H.F.; Blacker, C. Development of methods for remotely sensing grass growth to enable precision application of nitrogen fertilizer. Adv. Anim. Biosci. 2017, 8, 758–763. [Google Scholar] [CrossRef]
- Flynn, S.; Dougherty, C.; Wendroth, O. Assessment of pasture biomass with Normalized Difference Vegetation Index from active ground-based sensors. Agron. J. 2008, 100, 114–121. [Google Scholar] [CrossRef]
- Pullanagari, R.R.; Yule, I.J.; Tuohy, M.P.; Hedley, M.J.; Dynes, R.A.; King, W.M. Proximal sensing of the seasonal variability of pasture nutritive value using multispectral radiometry. Grass Forage Sci. 2013, 68, 110–119. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Murphy, D.J.; Murphy, M.D.; O’Brien, B.; O’Donovan, M. A review of precision technologies for optimising pasture measurement on irish grassland. Agriculture 2021, 11, 600. [Google Scholar] [CrossRef]
- Ali, I.; Cawkwell, F.; Dwyer, E.; Barrett, B.; Green, S. Satellite remote sensing of grasslands: From observation to management. J. Plant Ecol. 2016, 9, 649–671. [Google Scholar] [CrossRef] [Green Version]
- Atzberger, C. Advances in remote sensing of agriculture: Context description, existing operational monitoring systems and major information needs. Remote Sens. 2013, 5, 949–981. [Google Scholar] [CrossRef] [Green Version]
- Berger, K.; Verrelst, J.; Féret, J.B.; Wang, Z.; Wocher, M.; Strathmann, M.; Danner, M.; Mauser, W.; Hank, T. Crop nitrogen monitoring: Recent progress and principal developments in the context of imaging spectroscopy missions. Remote Sens. Environ. 2020, 242, 111758. [Google Scholar] [CrossRef]
- Wachendorf, M.; Fricke, T.; Möckel, T. Remote sensing as a tool to assess botanical composition, structure, quantity and quality of temperate grasslands. Grass Forage Sci. 2017, 73, 1–14. [Google Scholar] [CrossRef]
- Reinermann, S.; Asam, S.; Kuenzer, C. Remote sensing of grassland production and management-A review. Remote Sens. 2020, 12, 1949. [Google Scholar] [CrossRef]
- Manfreda, S.; Mccabe, M.F.; Miller, P.E.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; Dor, E.B.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2018, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Dandois, J.P.; Ellis, E.C. Remote Sensing of Vegetation Structure Using Computer Vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef] [Green Version]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery, based on Structure from Motion (SFM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef] [Green Version]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative remote sensing at ultra-high resolution with UAV spectroscopy: A review of sensor technology, measurement procedures, and data correction workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef] [Green Version]
- Bareth, G.; Schellberg, J. Replacing Manual Rising Plate Meter Measurements with Low-cost UAV-Derived Sward Height Data in Grasslands for Spatial Monitoring. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2018, 86, 157–168. [Google Scholar] [CrossRef]
- Borra-Serrano, I.; De Swaef, T.; Muylle, H.; Nuyttens, D.; Vangeyte, J.; Mertens, K.; Saeys, W.; Somers, B.; Roldán-Ruiz, I.; Lootens, P. Canopy height measurements and non-destructive biomass estimation of Lolium perenne swards using UAV imagery. Grass Forage Sci. 2019, 74, 356–369. [Google Scholar] [CrossRef]
- Zhang, H.; Sun, Y.; Chang, L.; Qin, Y.; Chen, J.; Qin, Y.; Du, J.; Yi, S.; Wang, Y. Estimation of grassland canopy height and aboveground biomass at the quadrat scale using unmanned aerial vehicle. Remote Sens. 2018, 10, 85. [Google Scholar] [CrossRef] [Green Version]
- Grüner, E.; Astor, T.; Wachendorf, M. Biomass Prediction of Heterogeneous Temperate Grasslands Using an SfM Approach Based on UAV Imaging. Agronomy 2019, 9, 54. [Google Scholar] [CrossRef] [Green Version]
- Jenal, A.; Lussem, U.; Bolten, A.; Gnyp, M.L.; Schellberg, J.; Jasper, J.; Bongartz, J.; Bareth, G. Investigating the Potential of a Newly Developed UAV-based VNIR/SWIR Imaging System for Forage Mass Monitoring. PFG—J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 88, 493–507. [Google Scholar] [CrossRef]
- Capolupo, A.; Kooistra, L.; Berendonk, C.; Boccia, L.; Suomalainen, J. Estimating Plant Traits of Grasslands from UAV-Acquired Hyperspectral Images: A Comparison of Statistical Approaches. ISPRS Int. J. Geo-Inform. 2015, 4, 2792–2820. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Brazier, R.E.; Anderson, K. Ultra-fine grain landscape-scale quantification of dryland vegetation structure with drone-acquired structure-from-motion photogrammetry. Remote Sens. Environ. 2016, 183, 129–143. [Google Scholar] [CrossRef] [Green Version]
- Forsmoo, J.; Anderson, K.; Macleod, C.J.A.; Wilkinson, M.E.; Brazier, R. Drone-based structure-from-motion photogrammetry captures grassland sward height variability. J. Appl. Ecol. 2018, 55, 2587–2599. [Google Scholar] [CrossRef]
- Geipel, J.; Korsaeth, A. Hyperspectral Aerial Imaging for Grassland Yield Estimation. Adv. Anim. Biosci. 2017, 8, 770–775. [Google Scholar] [CrossRef]
- Lussem, U.; Schellberg, J.; Bareth, G. Monitoring Forage Mass with Low-Cost UAV Data: Case Study at the Rengen Grassland Experiment. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 88, 407–422. [Google Scholar] [CrossRef]
- Rueda-Ayala, V.P.; Peña, J.M.; Höglind, M.; Bengochea-Guevara, J.M.; Andújar, D. Comparing UAV-based technologies and RGB-D reconstruction methods for plant height and biomass monitoring on grass ley. Sensors 2019, 19, 535. [Google Scholar] [CrossRef] [Green Version]
- Grüner, E.; Wachendorf, M.; Astor, T. The potential of UAV-borne spectral and textural information for predicting aboveground biomass and N fixation in legume-grass mixtures. PLoS ONE 2020, 15, e234703. [Google Scholar] [CrossRef] [PubMed]
- Näsi, R.; Viljanen, N.; Kaivosoja, J.; Alhonoja, K.; Hakala, T.; Markelin, L.; Honkavaara, E. Estimating biomass and nitrogen amount of barley and grass using UAV and aircraft based spectral and photogrammetric 3D features. Remote Sens. 2018, 10, 1082. [Google Scholar] [CrossRef] [Green Version]
- Yuan, M.; Burjel, J.C.; Isermann, J.; Goeser, N.J.; Pittelkow, C.M. Unmanned aerial vehicle-based assessment of cover crop biomass and nitrogen uptake variability. J. Soil Water Conserv. 2019, 74, 350–359. [Google Scholar] [CrossRef] [Green Version]
- Geipel, J.; Bakken, A.K.; Jørgensen, M.; Korsaeth, A. Forage yield and quality estimation by means of UAV and hyperspectral imaging. Precis. Agric. 2021, 22, 1437–1463. [Google Scholar] [CrossRef]
- Oliveira, R.A.; Näsi, R.; Niemeläinen, O.; Nyholm, L.; Alhonoja, K.; Kaivosoja, J.; Jauhiainen, L.; Viljanen, N.; Nezami, S.; Markelin, L.; et al. Machine learning estimators for the quantity and quality of grass swards used for silage production using drone-based imaging spectrometry and photogrammetry. Remote Sens. Environ. 2020, 246, 111830. [Google Scholar] [CrossRef]
- Wijesingha, J.; Astor, T.; Schulze-Brüninghof, D.; Wengert, M. Predicting Forage Quality of Grasslands Using UAV-Borne Imaging Spectroscopy. Remote Sens. 2020, 12, 126. [Google Scholar] [CrossRef] [Green Version]
- Viljanen, N.; Honkavaara, E.; Näsi, R.; Hakala, T.; Niemeläinen, O.; Kaivosoja, J. A Novel Machine Learning Method for Estimating Biomass of Grass Swards Using a Photogrammetric Canopy Height Model, Images and Vegetation Indices Captured by a Drone. Agriculture 2018, 8, 70. [Google Scholar] [CrossRef] [Green Version]
- Pranga, J.; Borra-Serrano, I.; Aper, J.; De Swaef, T.; Ghesquiere, A.; Quataert, P.; Roldan-Ruiz, I.; Janssens, I.A.; Ruysschaert, G.; Lootens, P. Improving Accuracy of Herbage Yield Predictions in Perennial Ryegrass with UAV-Based Structural and Spectral Data Fusion and Machine Learning. Remote Sens. 2021, 13, 3459. [Google Scholar] [CrossRef]
- Karunaratne, S.; Thomson, A.; Morse-McNabb, E.; Wijesingha, J.; Stayches, D.; Copland, A.; Jacobs, J. The fusion of spectral and structural datasets derived from an airborne multispectral sensor for estimation of pasture dry matter yield at paddock scale with time. Remote Sens. 2020, 12, 2017. [Google Scholar] [CrossRef]
- MicaSense RedEdge-M User Manual. Available online: https://support.micasense.com/hc/en-us/article_attachments/115004168274/RedEdge-M_User_Manual.pdf (accessed on 15 November 2021).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021; Available online: http://www.r-project.org/ (accessed on 15 March 2022).
- R Studio Team. RStudio: Integrated Development for R; RStudio: Boston, MA, USA, 2020; Available online: http://www.rstudio.com/ (accessed on 15 March 2022).
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309–317. [Google Scholar]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Yang, C.; Everitt, J.H.; Bradford, J.M.; Murden, D. Airborne hyperspectral imagery and yield monitor data for mapping cotton yield variability. Precis. Agric. 2004, 5, 445–461. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of Soil-Adjusted Vegetation Indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A Modified Soil Adjusted Vegetation Index. Remote Sens. Environ. 1994, 126, 119–126. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.; Gao, X.; Ferreira, L. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, N. Quantitative estimation of chlorophyll-a using reflectance spectra: Experiments with autumn chestnut and maple leaves. J. Photochem. Photobiol. B Biol. 1994, 22, 247–252. [Google Scholar] [CrossRef]
- Roujean, J.L.; Breon, F.M. Estimating PAR absorbed by vegetation from bidirectional reflectance measurements. Remote Sens. Environ. 1995, 51, 375–384. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf-area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Barnes, E.M.; Clarke, T.R.; Richards, S.E.; Colaizzi, P.D.; Haberland, J.; Kostrzewski, M.; Waller, P.; Choi, C.; Riles, E.; Thompson, T.; et al. Coincident Detection of Crop Water Stress, Nitrogen Status and Canopy Density Using Ground-Based Multispectral Data. In Proceedings of the Fifth International Conference on Precision Agriculture, Bloomington, MN, USA, 16–19 July 2000; Roberts, P.C., Rust, R.H., Larson, W.E., Eds.; American Society of Agronomy: Madison, WI, USA, 2000. [Google Scholar]
- Long, D.S.; Eitel, J.U.H.; Huggins, D.R. Assessing Nitrogen Status of Dryland Wheat Using the Canopy Chlorophyll Content Index. Crop Manag. 2009, 8, 1–8. [Google Scholar] [CrossRef]
- Chen, J.M. Evaluation of Vegetation Indices and a Modified Simple Ratio for Boreal Applications. Can. J. Remote Sens. 1996, 22, 1–21. [Google Scholar] [CrossRef]
- Ramoelo, A.; Skidmore, A.K.; Cho, M.A.; Schlerf, M.; Mathieu, R.; Heitkönig, I.M.A. Regional estimation of savanna grass nitrogen using the red-edge band of the spaceborne Rapideye sensor. Int. J. Appl. Earth Obs. Geoinf. 2012, 19, 151–162. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Metternicht, G. Vegetation indices derived from high-resolution airborne videography for precision crop management. Int. J. Remote Sens. 2003, 24, 2855–2877. [Google Scholar] [CrossRef]
- Gitelson, A.; Kaufman, Y.; Stark, R.; Rundquist, D. Novel Algorithms for Remote Estimation of Vegetation Fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Kuhn, M.; Wing, J.; Weston, S.; Williams, A.; Keefer, C.; Engelhardt, A.; Cooper, T.; Mayer, Z.; Kenkel, B.; The R Core Team; et al. Package “caret”: Classification and Regression Training 2022. Available online: https://cran.r-project.org/web/packages/caret/caret.pdf (accessed on 15 March 2022).
- Kuhn, M. Building Predictive Models in R Using the caret Package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Wold, S.; Sjöström, M.; Eriksson, L. PLS-regression: A basic tool of chemometrics. Chemom. Intell. Lab. Syst. 2001, 58, 109–130. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Drăgu, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Smola, A.J.; Schölkopf, B. A tutorial on support vector regression. Stat. Comput. 2004, 14, 199–222. [Google Scholar] [CrossRef] [Green Version]
- Probst, P.; Wright, M.; Boulesteix, A. Hyperparameters and tuning strategies for random forest. WIREs Data Min. Knowl. Discov. 2019, 9, e1301. [Google Scholar] [CrossRef] [Green Version]
- Schratz, P.; Muenchow, J.; Iturritxa, E.; Richter, J.; Brenning, A. Hyperparameter tuning and performance assessment of statistical and machine-learning algorithms using spatial data. Ecol. Modell. 2019, 406, 109–120. [Google Scholar] [CrossRef] [Green Version]
- Mevik, B.-H.; Wehrens, R. The pls package: Principal component and partial least squares regression in R. J. Stat. Softw. 2007, 18, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Szymczak, S.; Holzinger, E.; Dasgupta, A.; Malley, J.D.; Molloy, A.M.; Mills, J.L.; Brody, L.C.; Stambolian, D.; Bailey-Wilson, J.E. r2VIM: A new variable selection method for random forests in genome-wide association studies. BioData Min. 2016, 9, 7. [Google Scholar] [CrossRef] [Green Version]
- Wright, M.; Ziegler, A. ranger: A fast Implementation of Random Forest for High Dimensional Data in C++ and R. J. Stat. Softw. 2017, 17, 1–77. [Google Scholar] [CrossRef] [Green Version]
- Karatzoglou, A.; Smola, A.; Hornik, K.; Zeileis, A. kernlab—An S4 package for kernel methods in R. J. Stat. Softw. 2004, 11, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Greenwell, B.; Boehmke, B.; Gray, B. Package “vip”: Variable Importance Plots 2020. Available online: https://cran.r-project.org/web/packages/vip/vip.pdf (accessed on 15 March 2022).
- Greenwell, B.; Boehmke, B. Variable Importance Plots—An Introduction to the vip Package. R J. 2020, 12, 343–366. [Google Scholar] [CrossRef]
- Koppe, W.; Henning, S.D.; Li, F.; Gnyp, M.L.; Miao, Y.; Jia, L.; Chen, X.; Bareth, G. Multi-Temporal Hyperspectral and Radar Remote Sensing for Estimating Winter Wheat Biomass in the North China Plain. Photogramm. Fernerkund. Geoinf. 2012, 3, 281–298. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Fusion of hyperspectral and LiDAR remote sensing data for classification of complex forest areas. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1416–1427. [Google Scholar] [CrossRef] [Green Version]
- Puttonen, E.; Jaakkola, A.; Litkey, P.; Hyyppä, J. Tree classification with fused mobile laser scanning and hyperspectral data. Sensors 2011, 11, 5158–5182. [Google Scholar] [CrossRef] [PubMed]
- Agisoft Ltd MicaSense RedEdge MX Processing Workflow (Including Reflectance Calibration) in Agisoft Metashape Professional. Available online: https://agisoft.freshdesk.com/support/solutions/articles/31000148780-micasense-rededge-mx-processing-workflow-including-reflectance-calibration-in-agisoft-metashape-pro (accessed on 20 November 2021).
- Mamaghani, B.; Salvaggio, C. Multispectral sensor calibration and characterization for sUAS remote sensing. Sensors 2019, 19, 4453. [Google Scholar] [CrossRef] [Green Version]
- Hütt, C.; Bolten, A.; Hohlmann, B.; Komainda, M.; Lussem, U.; Isselstein, J.; Bareth, G. First results of applying UAV laser scanning to a cattle grazing experiment. In Proceedings of the 21st Symposium of the European Grassland Federation: Sensing—New Insights into Grassland Science and Practice; Astor, T., Dzene, I., Eds.; Organising Committee of the 21st Symposium of the European Grassland Federation, Universität Kassel, Grassland Science and Renewable Plant Resources: Kassel, Germany, 2021; pp. 77–79. [Google Scholar]
- Lussem, U.; Bolten, A.; Menne, J.; Gnyp, M.L.; Schellberg, J.; Bareth, G. Estimating biomass in temperate grassland with high resolution canopy surface models from UAV-based RGB images and vegetation indices. J. Appl. Remote Sens. 2019, 13, 034525. [Google Scholar] [CrossRef]
- Wilke, N.; Siegmann, B.; Klingbeil, L.; Burkart, A.; Kraska, T.; Muller, O.; van Doorn, A.; Heinemann, S.; Rascher, U. Quantifying Lodging Percentage and Lodging Severity Using a UAV-Based Canopy Height Model Combined with an Objective Threshold Approach. Remote Sens. 2019, 11, 515. [Google Scholar] [CrossRef] [Green Version]
- IPCC. Climate Change and Land: An IPCC Special Report on Climate Change, Desertification, Land Degradation, Sustainable Land Management, Food Security, and Green House Gas Fluxes in Terrestrial Ecosystems; Shukla, P.R., Skea, J., Buendia, E.C., Masson-Delmotte, V., Pörtner, H.-O., Roberts, D.C., Zhai, P., Slade, R., Connors, S., Diemen, R., et al., Eds.; IPCC: Geneva, Switzerland, 2019; Available online: https://www.ipcc.ch/srccl/ (accessed on 15 March 2022).
- Li, F.; Miao, Y.; Hennig, S.D.; Gnyp, M.L.; Chen, X.; Jia, L.; Bareth, G. Evaluating hyperspectral vegetation indices for estimating nitrogen concentration of winter wheat at different growth stages. Precis. Agric. 2010, 11, 335–357. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Smith, R.B.; De Pauw, E. Hyperspectral vegetation indices and their relationships with agricultural crop characteristics. Remote Sens. Environ. 2000, 71, 158–182. [Google Scholar] [CrossRef]
- Lamb, D.W.; Steyn-Ross, M.; Schaares, P.; Hanna, M.M.; Silvester, W.; Steyn-Ross, A. Estimating leaf nitrogen concentration in ryegrass (Lolium spp.) pasture using the chlorophyll red-edge: Theoretical modelling and experimental observations. Int. J. Remote Sens. 2002, 23, 3619–3648. [Google Scholar] [CrossRef]
- Mutanga, O.; Skidmore, A.K. Hyperspectral band depth analysis for a better estimation of grass biomass (Cenchrus ciliaris) measured under controlled laboratory conditions. Int. J. Appl. Earth Obs. Geoinf. 2004, 5, 87–96. [Google Scholar] [CrossRef]
- Tilly, N.; Aasen, H.; Bareth, G. Fusion of plant height and vegetation indices for the estimation of barley biomass. Remote Sens. 2015, 7, 11449–11480. [Google Scholar] [CrossRef] [Green Version]
- Schaefer, M.T.; Lamb, D.W. A combination of plant NDVI and LiDAR measurements improve the estimation of pasture biomass in tall fescue (Festuca arundinacea var. fletcher). Remote Sens. 2016, 8, 109. [Google Scholar] [CrossRef] [Green Version]
- Michez, A.; Lejeune, P.; Bauwens, S.; Lalaina Herinaina, A.A.; Blaise, Y.; Muñoz, E.C.; Lebeau, F.; Bindelle, J. Mapping and monitoring of biomass and grazing in pasture with an unmanned aerial system. Remote Sens. 2019, 11, 473. [Google Scholar] [CrossRef] [Green Version]
- Togeiro de Alckmin, G.; Lucieer, A.; Rawnsley, R.; Kooistra, L. Perennial ryegrass biomass retrieval through multispectral UAV data. Comput. Electron. Agric. 2022, 193, 106574. [Google Scholar] [CrossRef]
- Yu, K.; Li, F.; Gnyp, M.L.; Miao, Y.; Bareth, G.; Chen, X. Remotely detecting canopy nitrogen concentration and uptake of paddy rice in the Northeast China Plain. ISPRS J. Photogramm. Remote Sens. 2013, 78, 102–115. [Google Scholar] [CrossRef]
- Zheng, H.; Ma, J.; Zhou, M.; Li, D.; Yao, X.; Cao, W.; Zhu, Y.; Cheng, T. Enhancing the nitrogen signals of rice canopies across critical growth stages through the integration of textural and spectral information from unmanned aerial vehicle (UAV) multispectral imagery. Remote Sens. 2020, 12, 957. [Google Scholar] [CrossRef] [Green Version]
- Curran, P.J. Remote sensing of foliar chemistry. Remote Sens. Environ. 1989, 30, 271–278. [Google Scholar] [CrossRef]
- Curran, P.J.; Dungan, J.L.; Macler, B.A.; Plummer, S.E. The effect of a red leaf pigment on the relationship between red edge and chlorophyll concentration. Remote Sens. Environ. 1991, 35, 69–76. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef]
- Hansen, P.M.; Schjoerring, J.K. Reflectance measurement of canopy biomass and nitrogen status in wheat crops using normalized difference vegetation indices and partial least squares regression. Remote Sens. Environ. 2003, 86, 542–553. [Google Scholar] [CrossRef]
- Jenal, A.; Hüging, H.; Ahrends, H.E.; Bolten, A.; Bongartz, J.; Bareth, G. Investigating the potential of a newly developed uav-mounted vnir/swir imaging system for monitoring crop traits—A case study for winter wheat. Remote Sens. 2021, 13, 1697. [Google Scholar] [CrossRef]
- Riesch, F.; Komainda, M.; Horn, J.; Isselstein, J. Pastures of the future: Prospects for virtual fencing to promote grazing in European dairy farming. In Proceedings of the Grassland Science in Europe: Meeting Future Demands for Grassland Production, Helsinki, Finland, 19–22 October 2020; Virkajärvi, P., Hakala, K., Hakojärvi, M., Helin, I., Herzon, I., Jokela, V., Peltonen, S., Rinne, M., Seppänen, M., Uusi-Kämppä, J., Eds.; EGF: Helsinki, Finland, 2020; Volume 25, pp. 671–673. [Google Scholar]
- Yates, K.L.; Bouchet, P.J.; Caley, M.J.; Mengersen, K.; Randin, C.F.; Parnell, S.; Fielding, A.H.; Bamford, A.J.; Ban, S.; Barbosa, A.M.; et al. Outstanding Challenges in the Transferability of Ecological Models. Trends Ecol. Evol. 2018, 33, 790–802. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wenger, S.J.; Olden, J.D. Assessing transferability of ecological models: An underappreciated aspect of statistical validation. Methods Ecol. Evol. 2012, 3, 260–267. [Google Scholar] [CrossRef]




















| Band Number | Band Name | Center Wavelength (nm) | Bandwidth FWHM (nm) |
|---|---|---|---|
| 1 | Blue | 475 | 20 |
| 2 | Green | 560 | 20 |
| 3 | Red | 668 | 10 |
| 4 | Near IR | 840 | 40 |
| 5 | Red Edge | 717 | 10 |
| Name | Equation | Application | Reference |
|---|---|---|---|
| Normalized Difference Vegetation Index | Greenness, green biomass, phenology | [67] | |
| Green Normalized Difference Vegetation Index | Green biomass, N concentration, LAI | [68] | |
| Blue Normalized Difference Vegetation Index | Greenness, green biomass, phenology | [69] | |
| Optimized Soil-Adjusted Vegetation Index | Green biomass, photosynthesis rate | [70] | |
| Modified Soil-Adjusted Vegetation Index | Green biomass, photosynthesis rate | [71] | |
| Modified Chlorophyll Absorption in Reflectance Index 1 | MCARI1 = | Chlorophyll concentration, plant stress, photosynthesis rate | [72] |
| Enhanced Vegetation Index | Green biomass, greenness, phenology | [73] | |
| Normalized Difference Red Edge Index | Chlorophyll | [74] | |
| Renormalized Difference Vegetation Index | Green biomass | [75] | |
| Simple Ratio | Green biomass | [76] | |
| (Simplified) Canopy Chlorophyll Content Index | Chlorophyll concentration, photosynthesis | [77] modified by [78] | |
| Modified Triangular Vegetation Index 2 | Green biomass | [72] | |
| Modified Simple Ratio | Green biomass | [79] | |
| Near-Infrared to Red Edge Ratio | Chlorophyll, N | [80] | |
| Red Edge to Red Ratio | Chlorophyll, N | [80] |
| Name | Equation | Application | Reference |
|---|---|---|---|
| Normalized Green Red Difference Index | Green biomass | [81] | |
| Plant Pigment Ratio Index | Chlorophyll | [82] | |
| Red Green Blue Vegetation Index | Green biomass | [30] | |
| Visible Atmospherically Resistant Index | Green biomass | [83] |
| Name | Description | Features Included |
|---|---|---|
| SH | Sward height metrics | SHmean, SHmin, SHmax, SHp90, SHp75, SHp50, SHp25 |
| VI.ms | Vegetation indices visible to near-infrared spectrum | See Table 2 |
| SB | Single bands of the Micasense RedEdge-M | Blue, green, red, red edge, near-infrared (B, G, R, RE, NIR) |
| VI.rgb | Vegetation indices visible spectrum | See Table 3 |
| DMY kg ha−1 | N% | Nup kg N ha−1 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Year | Mean | Max | Min | sd | Mean | Max | Min | sd | Mean | Max | Min | sd |
| 2018 | 1503 | 3376 | 300 | 791 | 2.99 | 5.06 | 1.67 | 0.88 | 43 | 108 | 10 | 24 |
| 2019 | 1189 | 3244 | 158 | 796 | 3.01 | 4.92 | 1.70 | 0.64 | 35 | 107 | 5 | 23 |
| Year | GP | Date | Error (cm) Sony α 7r | Error (cm) MS RedEdge-M | ||||
|---|---|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | |||
| 2018 | 1 | T0 (April 24) | 1.50 | 1.26 | 0.72 | - | - | - |
| TS (May 25) | 0.97 | 1.43 | 1.02 | 0.89 | 1.38 | 0.42 | ||
| 2 | T0 (May 29) | 2.72 | 1.83 | 0.62 | - | - | - | |
| TS (May 02) | 1.96 | 1.57 | 0.50 | 0.80 | 1.28 | 0.35 | ||
| 3 | T0 (July 12) | 3.97 | 1.87 | 0.98 | - | - | - | |
| TS (October 10) | 1.50 | 1.54 | 0.57 | 0.99 | 1.26 | 0.48 | ||
| 2019 | 1 | T0 (April 17) | 1.65 | 1.60 | 0.93 | - | - | - |
| TS (May 22) | 1.60 | 1.66 | 0.99 | 1.02 | 1.00 | 0.22 | ||
| 2 | T0 (June 18) | 2.88 | 1.47 | 0.58 | - | - | - | |
| TS (August 05) | 1.25 | 1.44 | 0.68 | 1.10 | 1.22 | 0.34 | ||
| 3 | T0 (September 02) | 6.74 | 3.93 | 1.43 | - | - | - | |
| TS (October 14) | 3.87 | 2.43 | 0.77 | 0.94 | 1.39 | 0.23 | ||
| 2018 | 2019 | |||||||
|---|---|---|---|---|---|---|---|---|
| May 25 | July 2 | May 22 | October 14 | |||||
| R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | |
| Blue | 0.74 | 0.17 | 0.58 | 0.22 | 0.71 | 0.20 | 0.71 | 0.21 |
| Green | 0.89 | 0.09 | 0.92 | 0.09 | 0.90 | 0.07 | 0.94 | 0.12 |
| Red | 0.88 | 0.13 | 0.69 | 0.19 | 0.83 | 0.15 | 0.80 | 0.19 |
| Red Edge | 0.93 | 0.08 | 1.00 | 0.02 | 0.95 | 0.06 | 0.96 | 0.11 |
| NIR | 1.00 | 0.09 | 1.00 | 0.10 | 1.00 | 0.06 | 1.00 | 0.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lussem, U.; Bolten, A.; Kleppert, I.; Jasper, J.; Gnyp, M.L.; Schellberg, J.; Bareth, G. Herbage Mass, N Concentration, and N Uptake of Temperate Grasslands Can Adequately Be Estimated from UAV-Based Image Data Using Machine Learning. Remote Sens. 2022, 14, 3066. https://doi.org/10.3390/rs14133066
Lussem U, Bolten A, Kleppert I, Jasper J, Gnyp ML, Schellberg J, Bareth G. Herbage Mass, N Concentration, and N Uptake of Temperate Grasslands Can Adequately Be Estimated from UAV-Based Image Data Using Machine Learning. Remote Sensing. 2022; 14(13):3066. https://doi.org/10.3390/rs14133066
Chicago/Turabian StyleLussem, Ulrike, Andreas Bolten, Ireneusz Kleppert, Jörg Jasper, Martin Leon Gnyp, Jürgen Schellberg, and Georg Bareth. 2022. "Herbage Mass, N Concentration, and N Uptake of Temperate Grasslands Can Adequately Be Estimated from UAV-Based Image Data Using Machine Learning" Remote Sensing 14, no. 13: 3066. https://doi.org/10.3390/rs14133066