
Autonomous Mission Planning Method for Optical Imaging Satellites Based on Real-Time Cloud Cover Information

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Fengyun-4 Meteorological Satellite and Its CLM Products
2.2. Methods
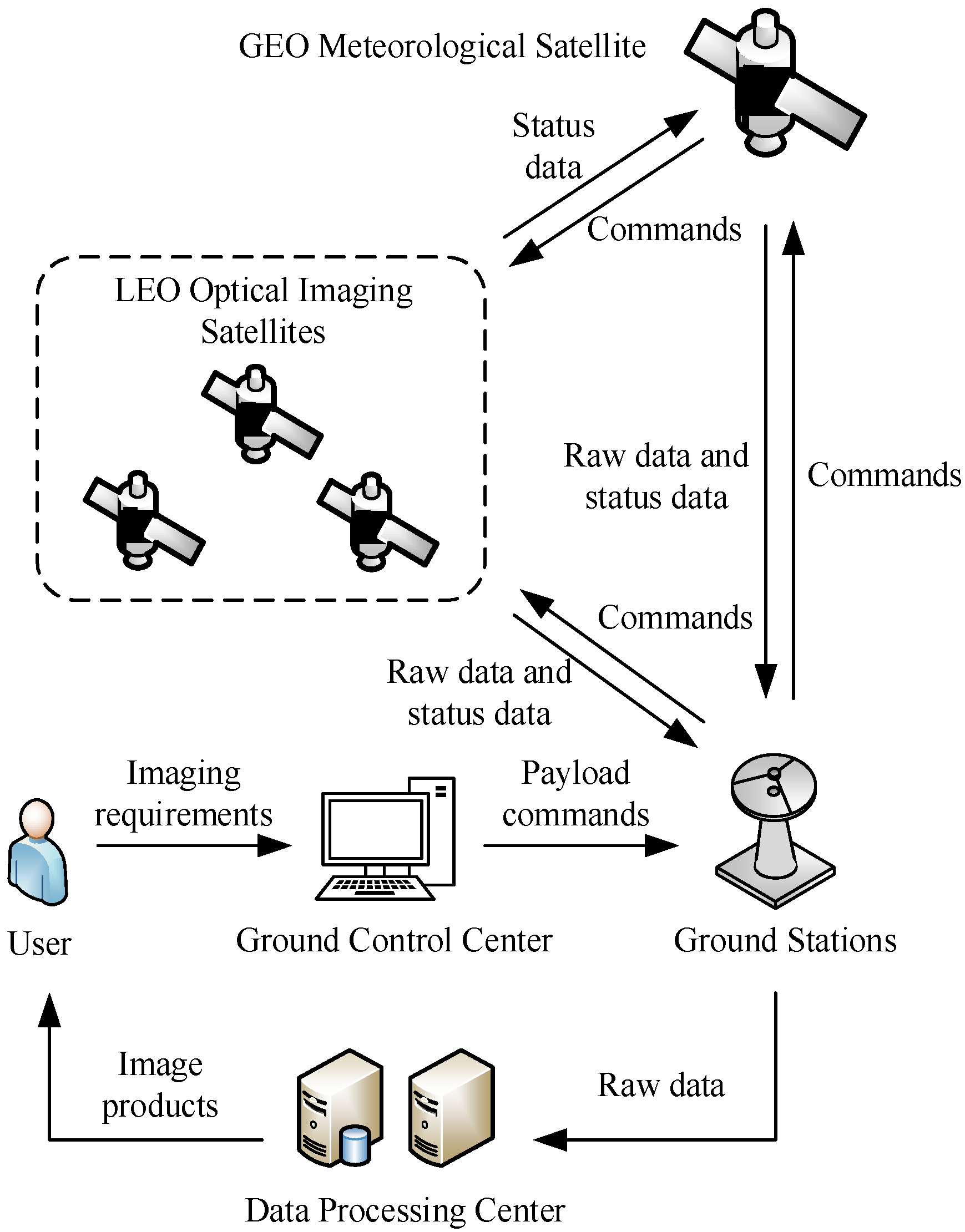
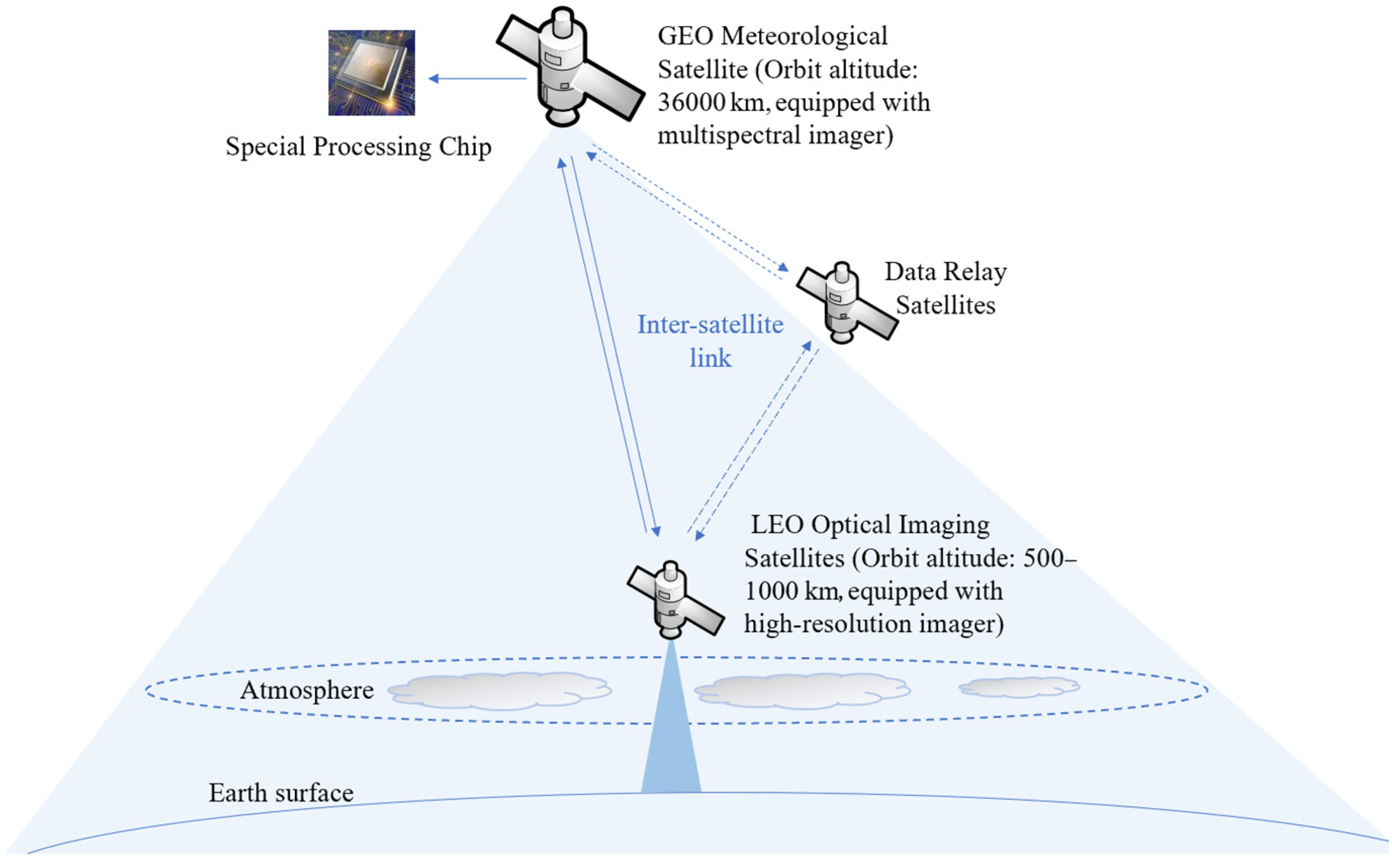
2.2.1. GEO–LEO Satellites Cooperation Scheme
- (1)
- I1 represents the most “intelligent” agent. Here the “agent” means one intelligent satellite in the satellite system composed by single satellite or multiple satellites. The primary difference between I1 and the other satellite agents is that it is capable of monitoring all satellite agents in the system and planning for the system as a whole;
- (2)
- I2 can interact with other satellite agents in the system. This usually requires the agent to have at least partial knowledge of the full agent-based system;
- (3)
- I3 has local planning functionalities onboard. “Local” means the agent is capable of generating and executing only plans related to its own tasks; and
- (4)
- I4 represents the most “unintelligent” agent. It can only receive commands and tasks from other satellite agents in the system, or from the ground, and execute them.
2.2.2. Mathematical Model
- (1)
- Each task can be observed at most once.
- (2)
- Each task must be observed within its available time windows.
- (3)
- Setup time between contiguous tasks must be sufficient for transition.
- (4)
- The memory consumption cannot exceed maximum memory capacity for each orbit.
- (5)
- The energy consumption cannot exceed maximum energy capacity for each orbit.
2.2.3. Planning Cycle
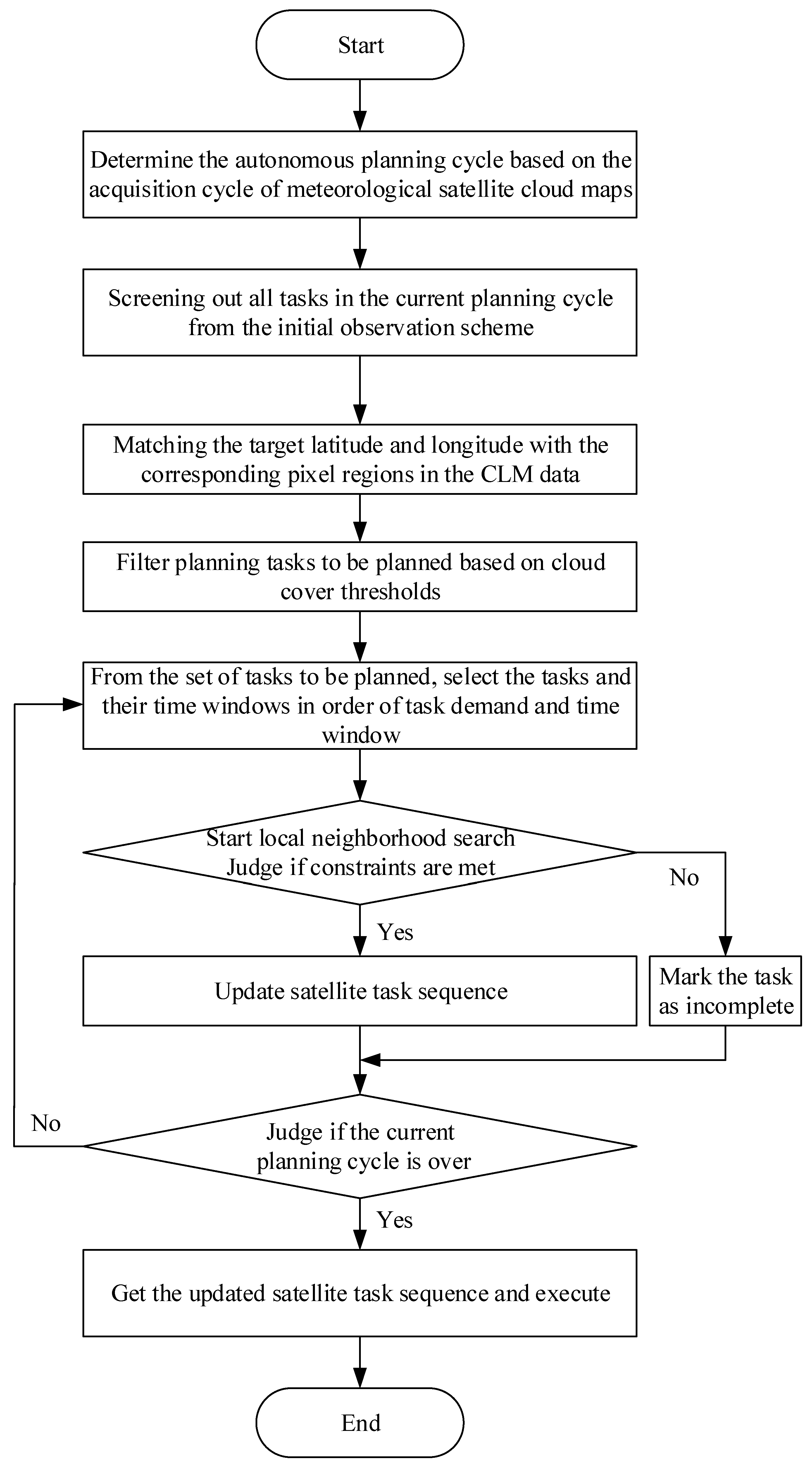
2.2.4. Onboard Autonomous Planning Algorithm
- (1)
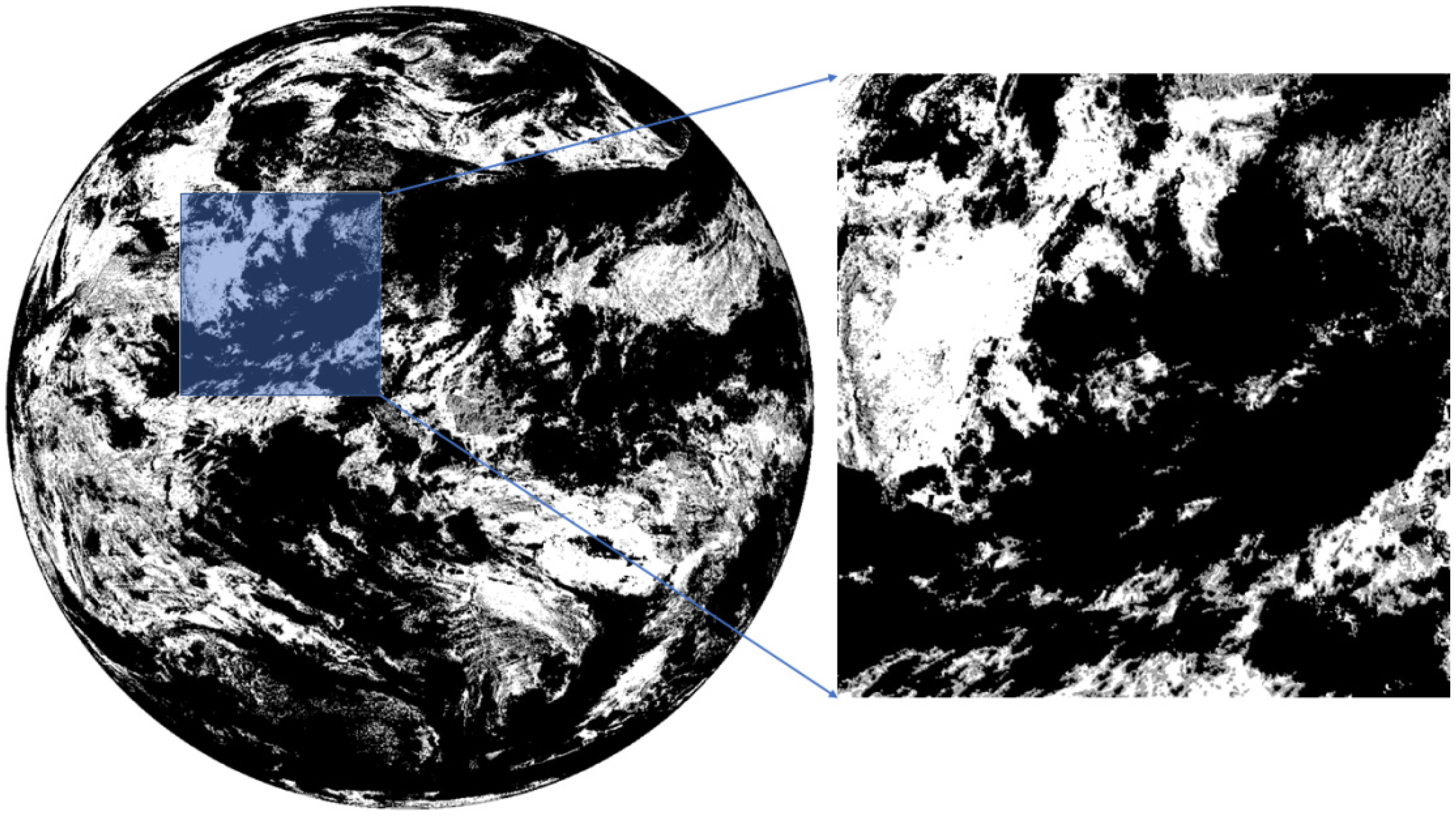
- Matching the longitude and latitude of the targets with the pixel of the CLM. Each ground target has a latitude and longitude. In order to determine the cloud over the target region, the latitude and longitude of the target are matched with the pixels in the CLM products to obtain accurate cloud cover rate in pixel units. The resolution of the CLM products is 4 km, and supplementary data ‘FullMask_Grid_4000.raw’ has a size of 2748 × 2748. The process of matching the longitude and latitude of the targets with the pixel region of the CLM is as following: Firstly, finding the corresponding pixel point in the ‘FullMask_Grid_4000.raw’ data based on the central latitude and longitude of targets. Secondly, matching the pixel point with the CLM pixel area. Thirdly, according to the size of the target, calculating the corresponding pixel area. For example, the actual ground size of the target is 60 km × 60 km, which is 15 × 15 pixel area in the CLM image;
- (2)
- Computing cloud cover rate and screening out tasks requiring adjustment. The International Satellite Cloud Climatology Project gives the cloud level according to the cloud cover of remote sensing images: cloud cover below 35% is set as low cloud level; cloud cover between 35% and 65% is set as medium cloud level; cloud cover above 65% is set as high cloud level. Referring to this cloud level, we set the cloud cover threshold to 65%, and after each acquisition of CLM images, we judge the cloud cover over all observed targets in this planning cycle. If the cloud cover is larger than 65%, the observation plan of this task in the current planning cycle is cancelled and the task is added to the set of pending tasks;
- (3)
- Selection of tasks and observation windows. The set of pending tasks consists of multiple new tasks, the tasks and observation windows need to be selected according to certain rules. Here the selection of new tasks is based on the task demand degree, which indicates the urgency of the task planning, and it is calculated using the following equation.
- (4)
- Local neighborhood search. Given that the neighborhood of the current solution often contains better neighborhood solutions, a local neighborhood search can be performed on the current solution. Local neighborhood search is a kind of heuristic algorithm which has the advantages of timeliness, high efficiency and succinctness. In this paper, insertion neighborhood search is used to arrange the current tasks. Insertion neighborhood means inserting the pending tasks that satisfy operational constraints into the current task sequence, and the basic steps are as follows:
2.3. Experimental Study
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Young, A.H.; Knapp, K.R.; Inamdar, A.; Hankins, W.; Rossow, W.B. The International Satellite Cloud Climatology Project H-Series Climate Data Record Product. Earth Syst. Sci. Data 2018, 10, 583–593. [Google Scholar] [CrossRef] [Green Version]
- Beaumet, G.; Verfaillie, G.; Charmeau, M.-C. Feasibility of Autonomous Decision Making on Board an Agile Earth-Observing Satellite. Comput. Intell. 2011, 27, 123–139. [Google Scholar] [CrossRef]
- He, L.; Liu, X.; Xing, L.; Chen, Y. Cloud Avoidance Scheduling Algorithm for Agile Optical Satellites. J. Comput. Theor. Nanosci. 2016, 13, 3691–3705. [Google Scholar] [CrossRef]
- Lin, W.-C.; Liao, D.-Y.; Liu, C.-Y.; Lee, Y.-Y. Daily Imaging Scheduling of an Earth Observation Satellite. IEEE Trans. Syst. Man Cybern. Part A 2005, 35, 213–223. [Google Scholar] [CrossRef]
- Liao, D.-Y.; Yang, Y.-T. Imaging Order Scheduling of an Earth Observation Satellite. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 794–802. [Google Scholar] [CrossRef]
- He, M.; He, R. Research on Agile Imaging Satellites Scheduling Techniques with the Consideration of Cloud Cover. Sci. Technol. Eng. 2013, 13, 8373–8379. [Google Scholar]
- He, L.; Liu, X.; Chen, Y.; Xing, L. Cloud Modeling and Processing Method for Agile Observing Satellite Mission Planning. Syst. Eng. Electron. 2016, 4, 852–858. [Google Scholar]
- Ye, Z.; Zheng, Z. Configuration of parameters α, β, ρ in ant algorithm. Geomat. Inf. Sci. Wuhan Univ. 2004, 29, 597–601. [Google Scholar]
- Wang, J.; Demeulemeester, E.; Qiu, D. A Pure Proactive Scheduling Algorithm for Multiple Earth Observation Satellites under Uncertainties of Clouds. Comput. Oper. Res. 2016, 74, 1–13. [Google Scholar] [CrossRef]
- Wang, J.; Demeulemeester, E.; Hu, X.; Wu, G. Expectation and SAA Models and Algorithms for Scheduling of Multiple Earth Observation Satellites under the Impact of Clouds. IEEE Syst. J. 2020, 14, 5451–5462. [Google Scholar] [CrossRef]
- He, L.; Liu, X.-L.; Chen, Y.-W.; Xing, L.-N.; Liu, K. Hierarchical Scheduling for Real-Time Agile Satellite Task Scheduling in a Dynamic Environment. Adv. Space Res. 2019, 63, 897–912. [Google Scholar] [CrossRef]
- Wang, D.; Chen, X.; Zhiliang, L.I.; Zhihuan, W.U.; School, G.; University, S.E. On-Board Cloud Detection and Avoidance Algorithms for Optical Remote Sensing Satellite. Syst. Eng. Electron. 2019, 41, 515–522. [Google Scholar]
- Wagstaff, K.L.; Altinok, A.; Chien, S.A.; Rebbapragada, U.; Schaffer, S.R.; Thompson, D.R.; Tran, D.Q. Cloud Filtering and Novelty Detection Using Onboard Machine Learning for the EO-1 Spacecraft. In Proceedings of the Proc. IJCAI Workshop AI in the Oceans and Space, Melbourne, Australia, 19 August 2017. [Google Scholar]
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D., Jr.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Hughes, M.J.; Laue, B. Cloud Detection Algorithm Comparison and Validation for Operational Landsat Data Products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef] [Green Version]
- Shen, H.; Li, H.; Qian, Y.; Zhang, L.; Yuan, Q. An Effective Thin Cloud Removal Procedure for Visible Remote Sensing Images. ISPRS J. Photogramm. 2014, 96, 224–235. [Google Scholar] [CrossRef]
- Lin, C.-H.; Lai, K.-H.; Chen, Z.-B.; Chen, J.-Y. Patch-Based Information Reconstruction of Cloud-Contaminated Multitemporal Images. IEEE Trans. Geosci. Remote Sens. 2013, 52, 163–174. [Google Scholar] [CrossRef]
- Li, C.; Ma, J.; Yang, P.; Li, Z. Detection of Cloud Cover Using Dynamic Thresholds and Radiative Transfer Models from the Polarization Satellite Image. J. Quant. Spectrosc. Radiat. Transf. 2019, 222, 196–214. [Google Scholar] [CrossRef]
- Irish, R.R. Landsat 7 Automatic Cloud Cover Assessment. In Proceedings of the Algorithms for Multispectral, Hyperspectral, and Ultraspectral Imagery VI, Orlando, FL, USA, 23 August 2000. [Google Scholar]
- Brewer, J.; Di Girolamo, L. Limitations of Fractal Dimension Estimation Algorithms with Implications for Cloud Studies. Atmos. Res. 2006, 82, 433–454. [Google Scholar] [CrossRef]
- Christodoulou, C.I.; Michaelides, S.C.; Pattichis, C.S. Multifeature Texture Analysis for the Classification of Clouds in Satellite Imagery. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2662–2668. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Automated Cloud, Cloud Shadow, and Snow Detection in Multitemporal Landsat Data: An Algorithm Designed Specifically for Monitoring Land Cover Change. Remote Sens. Environ. 2014, 152, 217–234. [Google Scholar] [CrossRef]
- Li, P.; Dong, L.; Xiao, H.; Xu, M. A Cloud Image Detection Method Based on SVM Vector Machine. Neurocomputing 2015, 169, 34–42. [Google Scholar] [CrossRef]
- Kotarba, A.Z. Evaluation of ISCCP Cloud Amount with MODIS Observations. Atmos. Res. 2015, 153, 310–317. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-Based Cloud and Cloud Shadow Detection in Landsat Imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Francis, A.; Sidiropoulos, P.; Muller, J.-P. CloudFCN: Accurate and Robust Cloud Detection for Satellite Imagery with Deep Learning. Remote Sens. 2019, 11, 2312. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Shen, H.; Cheng, Q.; Liu, Y.; You, S.; He, Z. Deep Learning Based Cloud Detection for Medium and High Resolution Remote Sensing Images of Different Sensors. ISPRS J. Photogramm. Remote Sens. 2019, 150, 197–212. [Google Scholar] [CrossRef] [Green Version]
- Xie, F.; Shi, M.; Shi, Z.; Yin, J.; Zhao, D. Multilevel Cloud Detection in Remote Sensing Images Based on Deep Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3631–3640. [Google Scholar] [CrossRef]
- Xian, D.; Zhang, P.; Gao, L.; Sun, R.; Zhang, H.; Jia, X. Fengyun Meteorological Satellite Products for Earth System Science Applications. Adv. Atmos. Sci. 2021, 38, 1267–1284. [Google Scholar] [CrossRef]
- Lee, J.; Shin, D.-B. Algorithm for Improved Stereoscopic Cloud-Top Height Retrieval Based on Visible and Infrared Bands for Himawari-8 and FY-4A. Remote Sens. 2021, 13, 4993. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the New Generation of Chinese Geostationary Weather Satellites, Fengyun-4. Bull. Am. Meteorol. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- Wang, X.; Min, M.; Wang, F.; Guo, J.; Li, B.; Tang, S. Intercomparisons of Cloud Mask Products among Fengyun-4A, Himawari-8, and MODIS. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8827–8839. [Google Scholar] [CrossRef]
- Schetter, T.; Campbell, M.; Surka, D. Multiple Agent-Based Autonomy for Satellite Constellations. Artif. Intell. 2003, 145, 147–180. [Google Scholar] [CrossRef] [Green Version]
- Gao, L.; Liu, Z.; Li, Z. Research on Architecture Model with Autonomous Coordination for Distributed Satellite Systems. In Proceedings of the 2011 International Conference on Computer Science and Service System (CSSS), Nanjing, China, 27 June 2011. [Google Scholar]
- Li, Z.; Li, X. Temporal Constraint Modeling and Simulation of Agile Satellite. In Proceedings of the 8th International Conference on Mechanical and Aerospace Engineering, Prague, Czech Republic, 14 September 2017. [Google Scholar]
- Wang, X.; Wu, G.; Xing, L.; Pedrycz, W. Agile Earth Observation Satellite Scheduling over 20 Years: Formulations, Methods, and Future Directions. IEEE Syst. J. 2020, 15, 3881–3892. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Definitions |
|---|---|
| T | represents the number of tasks |
| S | represents the number of EOSs |
| represents the number of orbits | |
| Energy consumption of satellite attitude maneuver per unit time | |
| Satellite attitude stabilization time | |
| Energy consumption of satellite attitude stabilization | |
| Memory consumption of observation per unit time | |
| Energy consumption of observation per unit time | |
| Memory capacity per orbit | |
| Energy capacity per orbit |
| Parameters | FY-4A |
|---|---|
| Orbit type | GEO |
| Orbit attitude | 36,000 km |
| Longitude of sub-satellite point | 104.7°E |
| Spatial resolution under full-disk | 4 km |
| Time resolution | 15 min |
| Parameters | GF-1 | GF-2 |
|---|---|---|
| Orbit type | Sun-synchronous Orbit | Sun-synchronous Orbit |
| Orbit attitude | 645 km | 631 km |
| Orbit inclination | 98.0506° | 97.9080° |
| Swath | 60 km | 45 km |
| Maximum rolling angle | ±35° | ±35° |
| Spatial resolution (PAN, MSS) | 2 m, 16 m | 1 m, 4 m |
| Type | Number of Tasks | Adjustment Ratio |
|---|---|---|
| Initial schedule | 325 | / |
| Onboard autonomous planning adjustment | 229 | 70.46% |
| Adjust to cloud-free window | 98 | 30.15% |
| Fail to adjust to cloud-free window | 131 | 40.31% |
| Cloud Cover Threshold | Number of Tasks in Initial Schedule | Onboard Autonomous Planning Adjustment | Adjust to Cloud-Free Window | Fail to Adjust to Cloud-Free Window | Adjustment Ratio |
|---|---|---|---|---|---|
| 5% | 325 | 296 | 131 | 165 | 91.08% |
| 15% | 325 | 277 | 121 | 156 | 85.23% |
| 25% | 325 | 266 | 112 | 154 | 81.85% |
| 35% | 325 | 260 | 111 | 149 | 80.00% |
| 45% | 325 | 251 | 106 | 145 | 77.23% |
| 55% | 325 | 244 | 101 | 143 | 75.08% |
| 65% | 325 | 229 | 98 | 131 | 70.46% |
| 75% | 325 | 218 | 94 | 124 | 67.08% |
| 85% | 325 | 202 | 87 | 115 | 62.15% |
| 95% | 325 | 172 | 72 | 100 | 52.92% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zhao, L.; Liu, Y.; Chen, X.; Chen, H.; Zheng, F.; Zhang, Y.; Wang, D.; Li, J.; Liu, J.; et al. Autonomous Mission Planning Method for Optical Imaging Satellites Based on Real-Time Cloud Cover Information. Remote Sens. 2022, 14, 2635. https://doi.org/10.3390/rs14112635
Li Z, Zhao L, Liu Y, Chen X, Chen H, Zheng F, Zhang Y, Wang D, Li J, Liu J, et al. Autonomous Mission Planning Method for Optical Imaging Satellites Based on Real-Time Cloud Cover Information. Remote Sensing. 2022; 14(11):2635. https://doi.org/10.3390/rs14112635
Chicago/Turabian StyleLi, Zhiliang, Limin Zhao, Yun Liu, Xingfeng Chen, Hang Chen, Fengjie Zheng, Yunli Zhang, Donghong Wang, Jiaguo Li, Jun Liu, and et al. 2022. "Autonomous Mission Planning Method for Optical Imaging Satellites Based on Real-Time Cloud Cover Information" Remote Sensing 14, no. 11: 2635. https://doi.org/10.3390/rs14112635