1. Introduction
With the advent of global economic integration, shipping has become the mainstay of the international transportation industry, displaying a considerable throughput. Marine navigation radar provides a full-time safe shipping guide to obviate navigation risks in oceans and rivers [
1,
2]. Thus, marine navigation radars need to be equipped with robust target detection capability. At present, river and sea surface target detection algorithm research has received widespread attention. They can be divided into three classes: statistic characteristic-based models represented by a constant false alarm rate (CFAR) [
3,
4,
5,
6,
7,
8], image processing-based methods such as image enhancement by visual saliency [
9,
10], and artificial intelligence-based models such as intelligent networks with training data [
11,
12]. Leng et al. [
5] introduced a bilateral CFAR algorithm for ship detection, which reduces the influence of synthetic aperture radar (SAR) ambiguities and sea clutter. Lang et al. [
12] adopted a CFAR algorithm to detect targets with a threshold determined by the pixels’ amplitudes in background windows. On the other hand, Chen et al. [
13] utilized a multi-scale window to calculate multi-scale local contrast measure (LCM), measuring the difference between the target area and its surrounding area, which is effective in dealing with small targets in a complex background. Local variance weighted information entropy (VWIE) has been applied to detect targets from SAR images and proved to be a simple and effective method for relatively complex background detection tasks [
14].
The detection of targets with smaller volumes and weaker reflections has become a new challenge, such as ice floes, buoys, and small boats. With the influence of varying wind, waves, and sea conditions, the sea clutter appears as a sea spike, which may cause targets to display flickering characteristics in radar images [
15]. These targets cannot be effectively detected by navigation radars in some frames. Owing to the discontinuous scattering of targets, the joint integration result of multiple frames cannot exceed the detection threshold, leading to missed detection. This significantly increases the risk of shipping accidents [
16]. Therefore, the research into the flickering characteristics of multi-target detection methods under a low signal-to-clutter ratio (SCR) is of prime importance. Because the above methods are usually used in a single frame target detection, the SCR of the fluctuating characteristics target is unstable and can easily be submerged in the clutter. So, the detection performance of the above method for the fluctuating characteristics of multi-targets under a low SCR will drop drastically [
17].
To find small fluctuating targets in sea clutter, some new detectors have been designed. First, some modified adaptive detectors were proposed, such as sub-band adaptive detectors [
18]. Second, nonlinear detectors based on fractal characters [
19] were proposed, but the single detection feature fails to make full use of the return information. Then, tri-feature-based detectors appeared, including amplitude and Doppler features [
20], polarization information features [
21], and time-frequency (TF) features [
22]. Xu et al. overcame the limitation of the feature dimensions in the number of the existing feature-based detectors to improve the detection performance. However, due to the high computational complexity, it is difficult to apply in practice. In addition, the neural network-based detector [
23,
24] is not suitable for practical application due to the lack of target training samples and the insufficient completeness of target types in the training set. Furthermore, some feature detectors are proposed based on a long observation time to detect fluctuating targets. Through a long-term integral, joint features can be extracted, and accurate target detection can be achieved [
25]. The most effective method is the target tracking before detection (TBD) method based on multi-frame joint detection, which utilizes the inter-frame motion relationship of the target. The existing methods of TBD include the dynamic programming (DP) algorithm [
26,
27,
28,
29], the particle filter (PF) [
30,
31] method and the multi-Bernoulli random set filter [
32]. Jiang et al. [
30] adopted a PF-TBD method based on K-distribution that adapts to the non-Gaussian characteristic of the sea clutter amplitude, and the calculation of likelihood ratio is deduced in detail. However, it supposes the sea clutter distribution to be known and unitary, but sea clutter is always time-varying in practical terms. Si et al. [
32] proposed a multi-target filter that models the unknown clutter as a gamma distribution and jointly estimates the multi-target state and the clutter distribution. However, it still hypothesizes the clutter distribution as known, which is not applicable in practice. The SRBE-PF-TBD method has better detection results for fluctuating target detection and does not require prior knowledge of the clutter, enhancing the adaptability and robustness [
31]. However, this kind of method is based on the theory of particle filtering, and has high computational complexity, which is not conducive to practical applications.
Dynamic programming tracking before detection (DP-TBD) has gained popularity due to it offering the advantages of simplicity and less pre-information being required [
33,
34,
35]. It transforms the optimal estimate of the target physical motion trajectory into the merit function maximum integral, which is a multi-frame joint test statistic [
36]. An efficient multi-path Viterbi-like algorithm was employed to solve the high-dimensional optimization problem [
37]. In order to reduce the computational complexity, two suboptimal algorithms were also developed by means of approximate optimal multi-path DP search [
38]. The light computational expense makes them the first implementable DP-TBD solutions to the practical multi-target detection and tracking problem. Jiang et al. [
39] proposed a method with prior information to improve the detection performance of fluctuating targets. Gao et al. [
28] proposed a novel method for fluctuating targets, and its two-stage detection approach greatly improved detection speed. However, the hypothesis test based on the K distribution is inconsistent with the practical time-varying clutter. Additionally, the multi-target detection problem with no pre-information will increase the computation cost of DP-TBD. In addition, due to the blanking state of the target with flickering characteristics, there are frame breaks in the target states. The accumulated integration amount of the above method cannot accumulate enough, and so the method experiences performance loss for flickering multi-target detection. Therefore, for the detection of flickering multi-targets under a low SCR, a novel method is proposed based on the advantages of a simple structure and less information being required for the DP model.
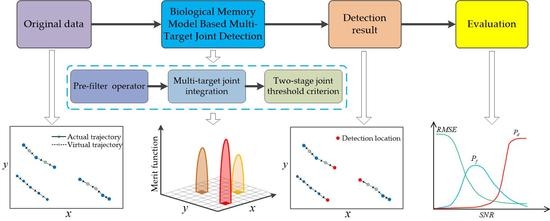
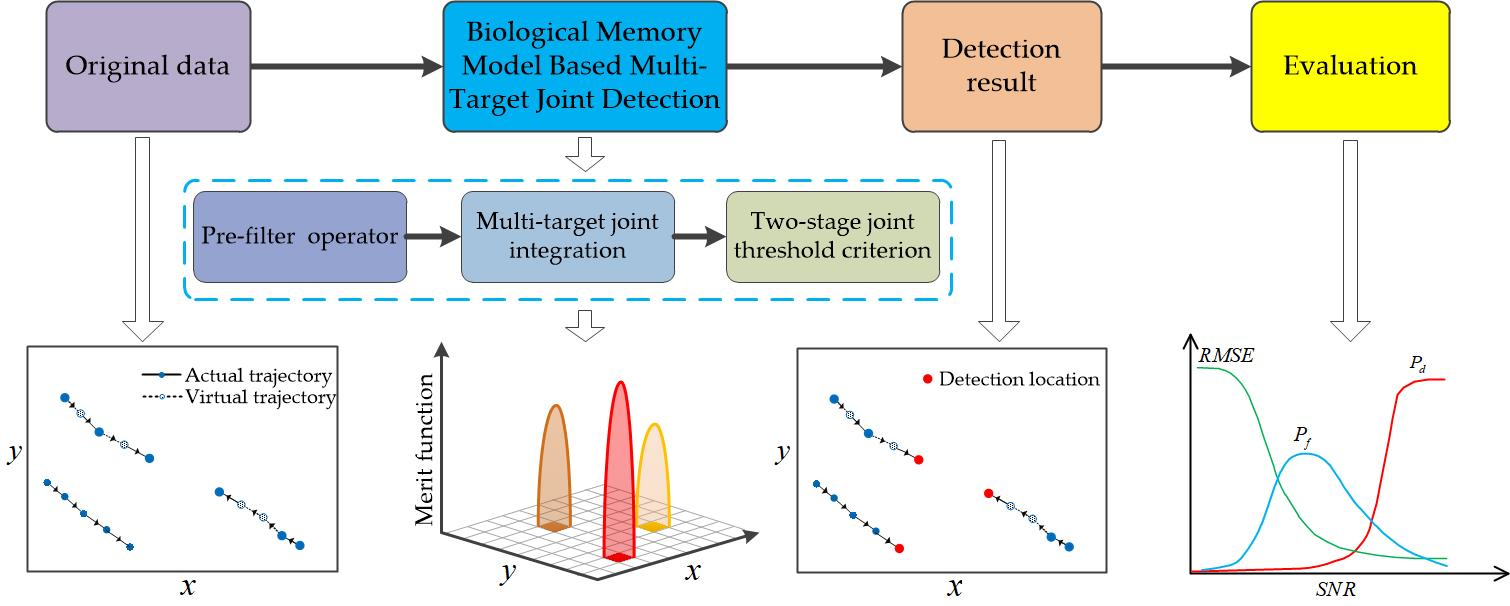
A biological memory model-based dynamic programming multi-target joint detection (BMM-DP-MJD) method is proposed. It detects multiple targets without pre-target and clutter information by means of an improved DP model, and adds biological memory model theory into the DP process to express the internal relationship of the flickering characteristics of the target among the frames and can deal with an unknown number of targets. The method includes four parts: a pre-detection operator, multi-target joint integration, and two-stage threshold judgment to achieve target detection. First, we use a global detection operator to discretize the multi-target state into multiple single-target states so as to realize the discretization of multiple targets. Second, the proposed function based on the biological memory model enhances the inter-frame correlation of targets with flickering characteristics. Then, the progressive loop integral operation in multi-target joint integration updates the merit function to optimize the target estimation set, reducing the interference and retaining useful information. Finally, the multi-target detection results are obtained by using the two-stage threshold criterion. Through the above steps, this paper makes the following two contributions:
Detection of the target with flickering characteristics under low SCR. This paper proposes a memory weight DP merit function integral operator. The theory of biological memory is introduced into DP integration to study the appearance and blanking state of targets with flickering characteristics in sea clutter. The merit function effectively integrates the correlation of flickering characteristic targets’ states among different frames. Therefore, the method achieves accurate detection for flickering characteristic targets with a low SCR.
Multi-target detection is employed without pre-target number information, and the computational cost is reduced. Usually, when using DP to solve multi-target detection problems, the target’s high-dimensional state is difficult to calculate due to the uncertain number of targets. However, the target number being known is inconsistent with practical applications. Therefore, we choose a simple and effective way to achieve the suboptimal solution of multi-target detection. We use a lower global threshold in the DP process and discretize the areas with candidate targets to simplify the high-dimensional maximization to multiple low-dimensional maximization, meaning that the computational cost is reduced.
This paper is organized as follows.
Section 2 introduces the DP model.
Section 3 describes the process of biological memory model-based dynamic programming multi-target joint detection method.
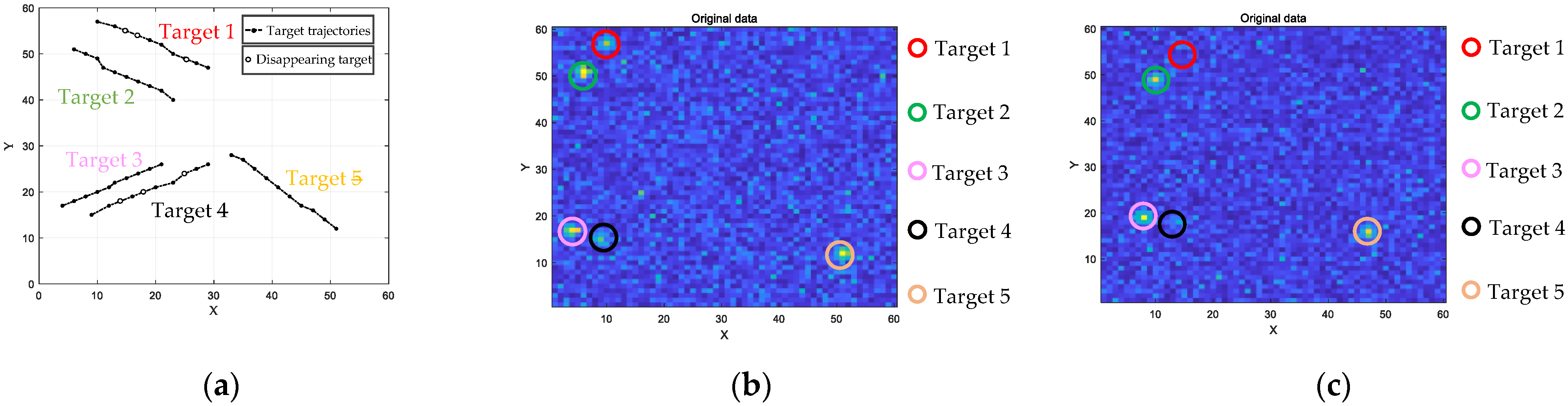
Section 4 verifies the effectiveness of the algorithm through simulation data and experimental data analysis.
Section 5 concludes the article.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}