
Initial Results of Modeling and Improvement of BDS-2/GPS Broadcast Ephemeris Satellite Orbit Based on BP and PSO-BP Neural Networks


Abstract
:1. Introduction
2. Materials and Methods
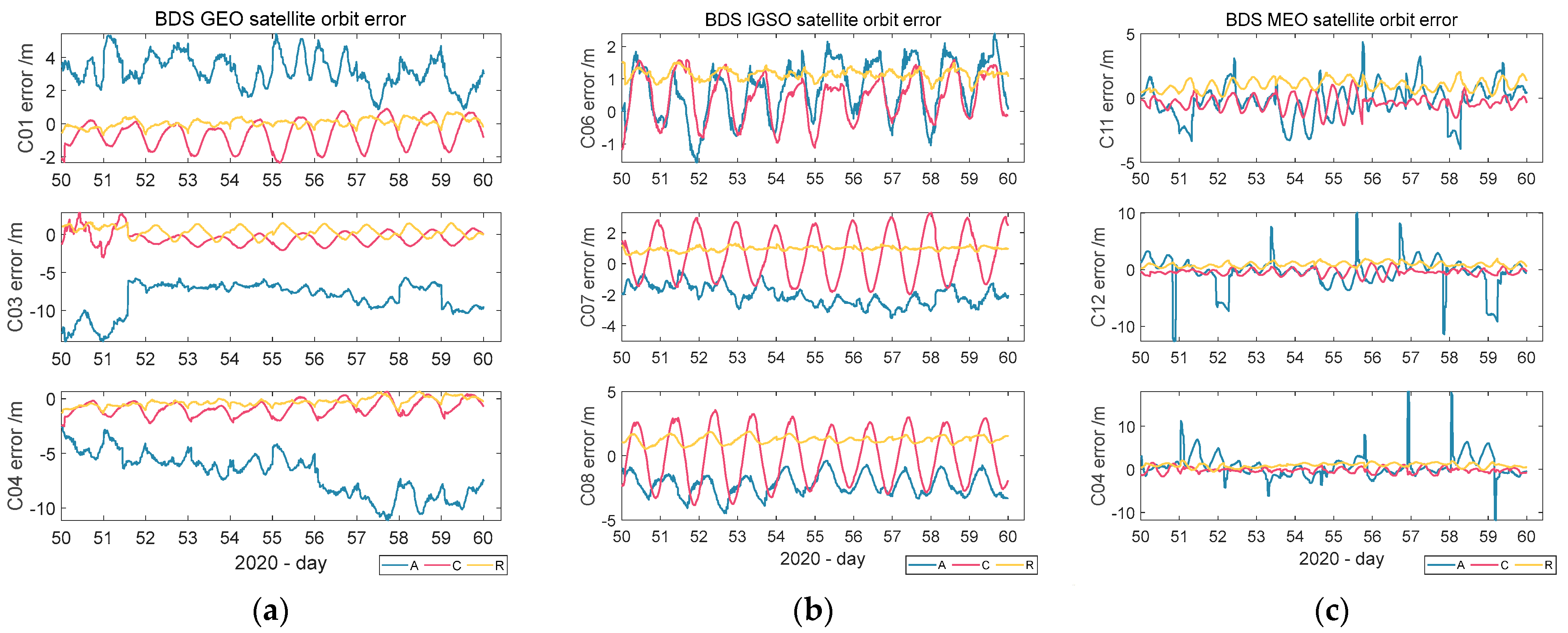
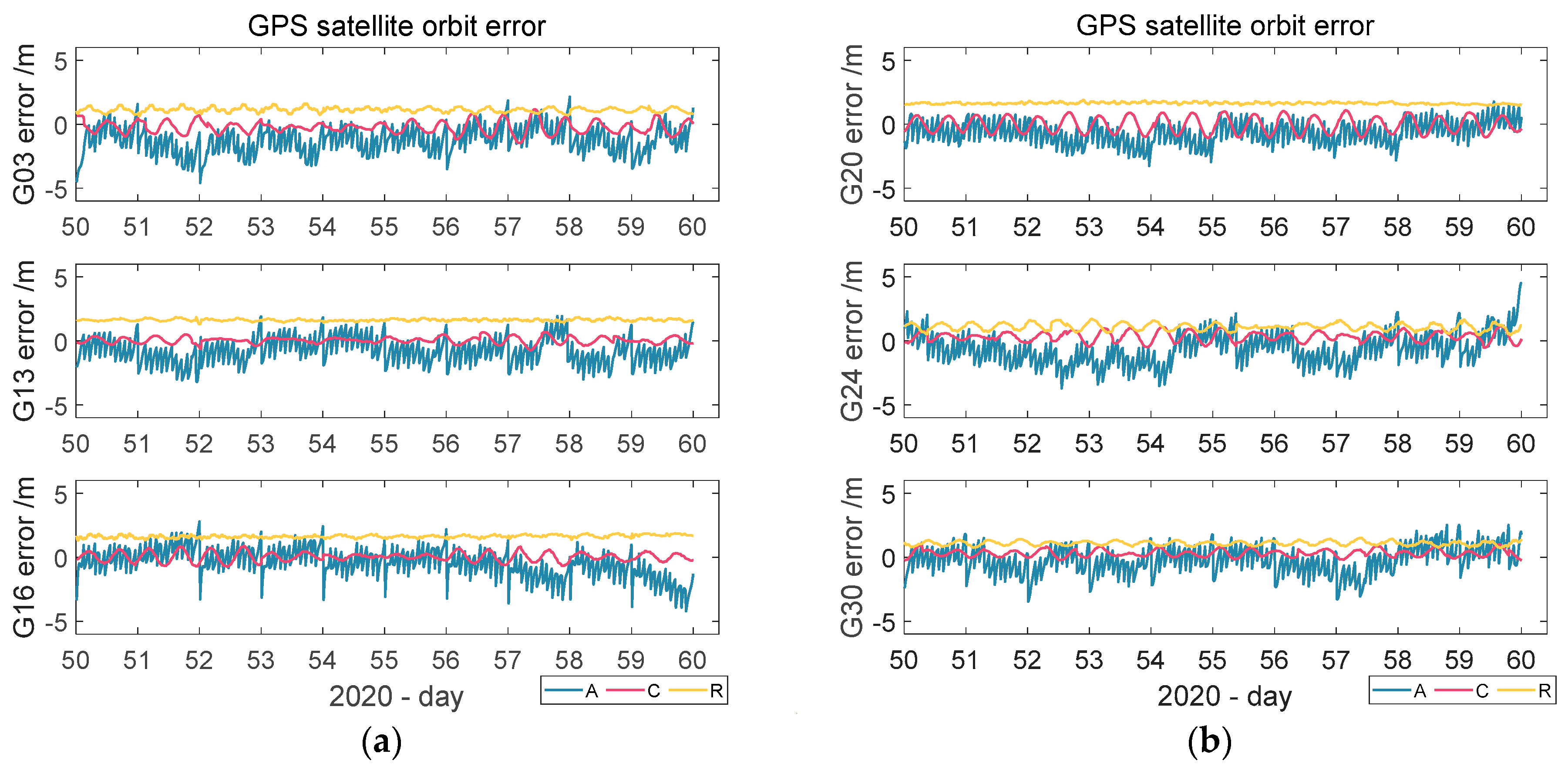
2.1. Orbit Error of Broadcast Ephemeris
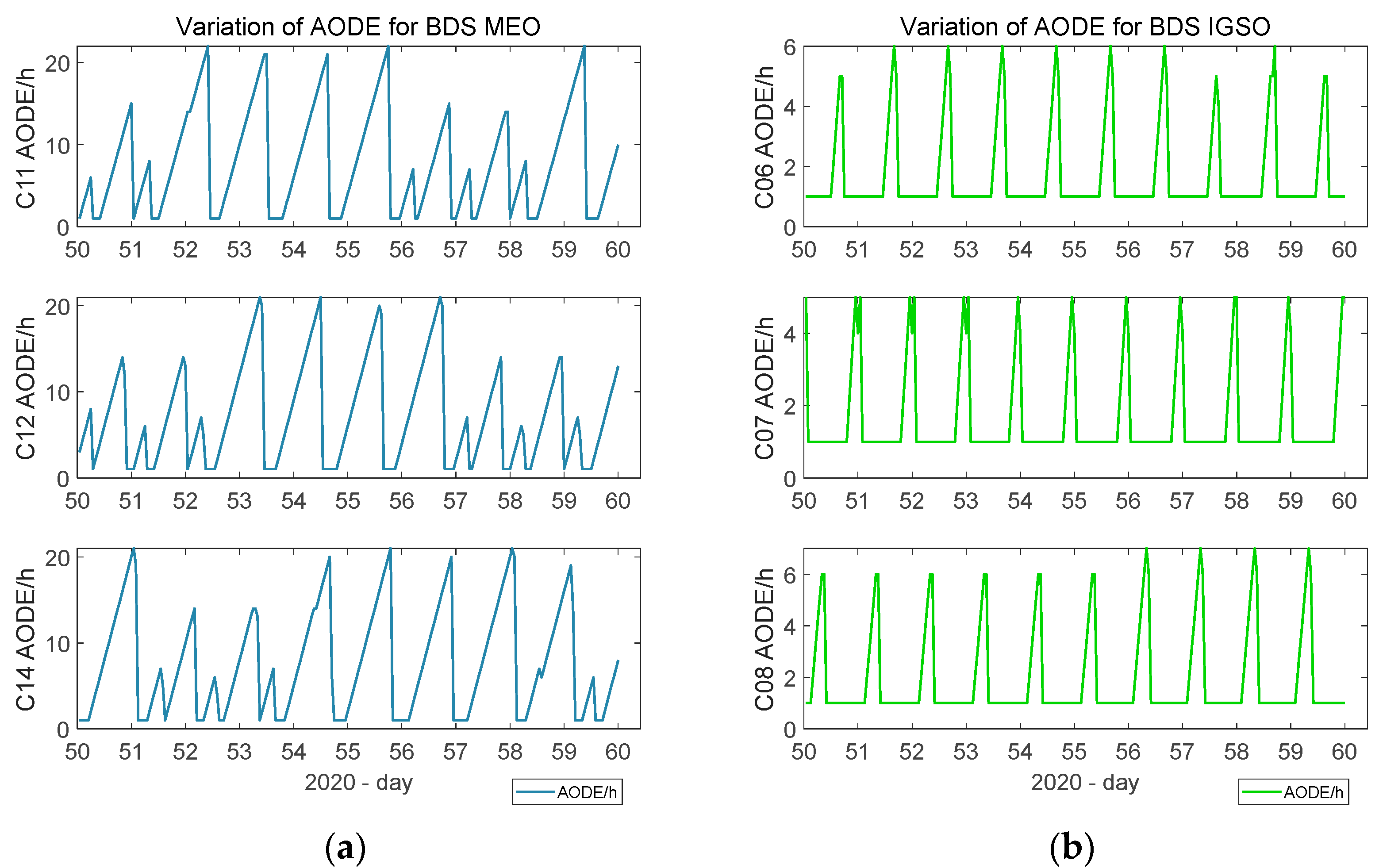
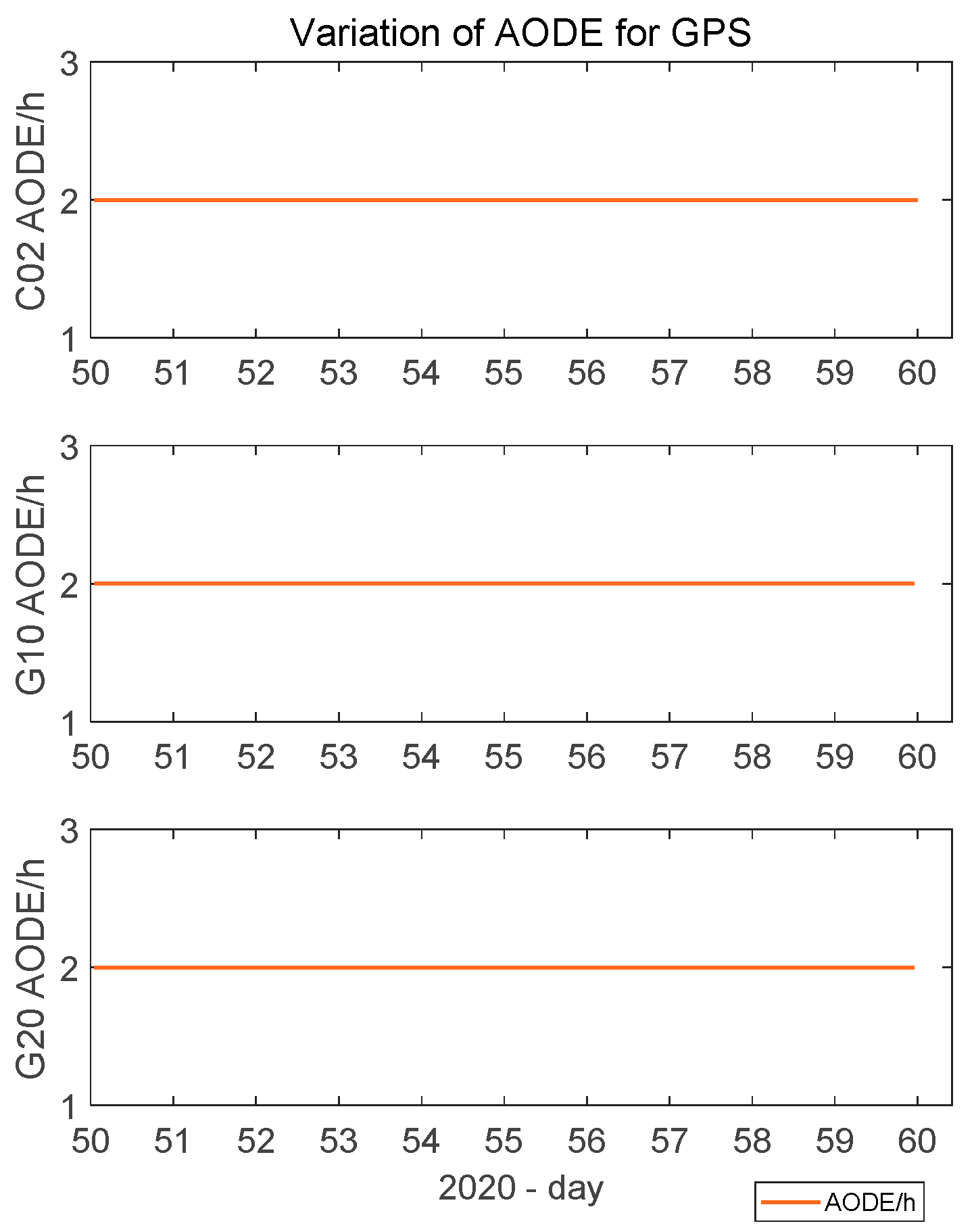
2.2. Impact of AODE of BDS
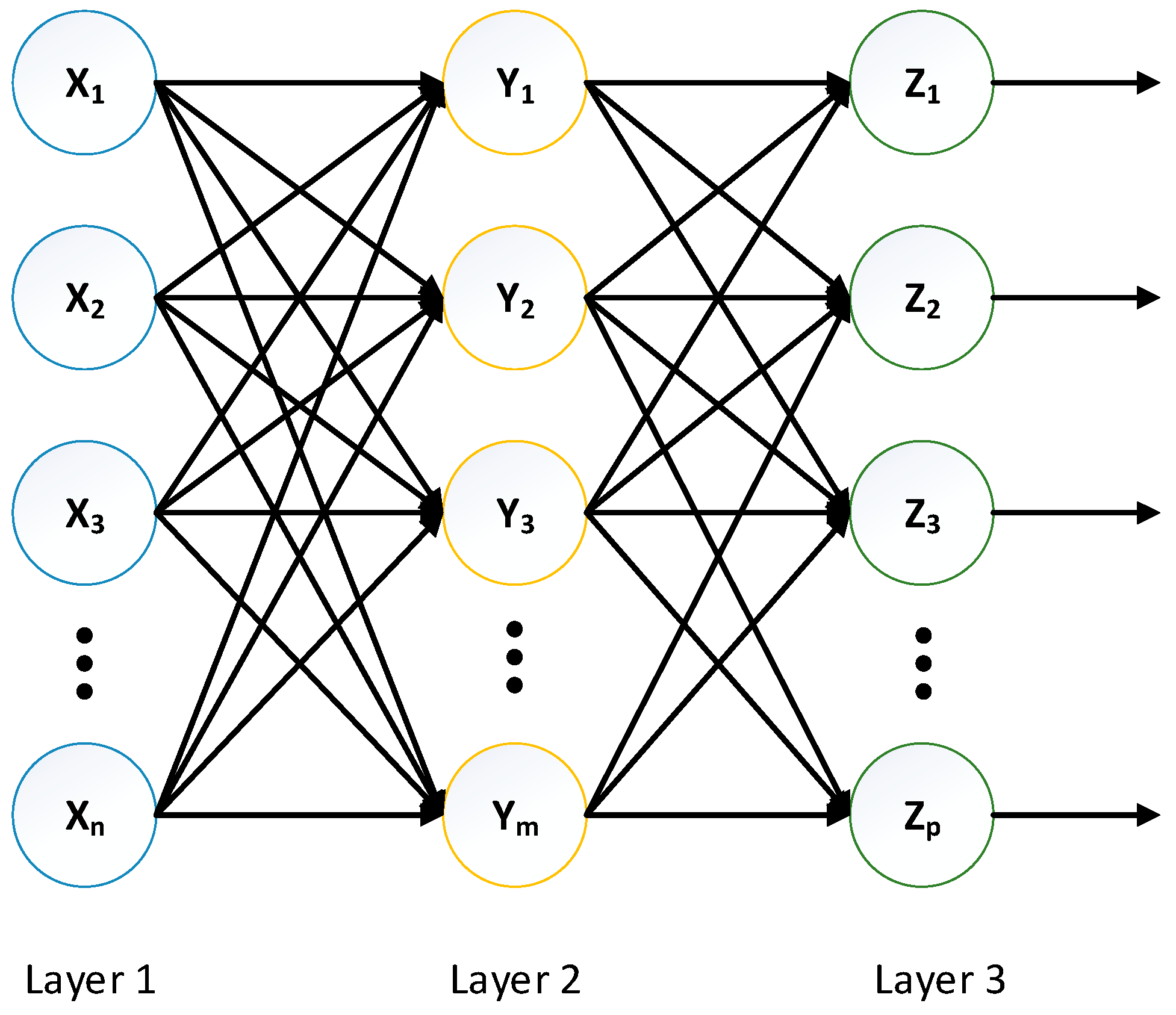
2.3. Model of BP Neural Network
2.4. PSO–BP Neural Network
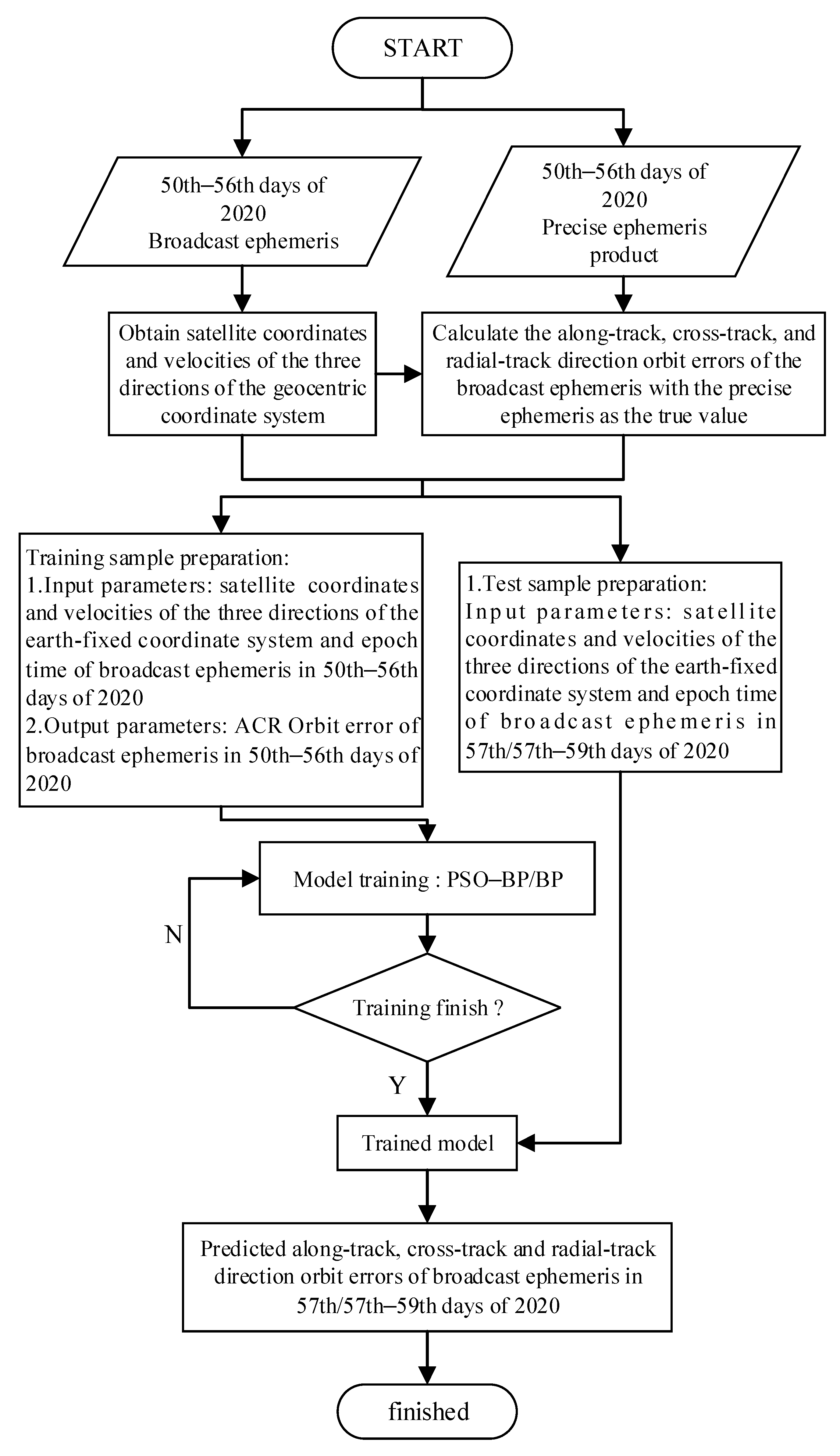
2.5. Experiment Process
3. Results
3.1. BDS Satellite Orbit Error Model Output
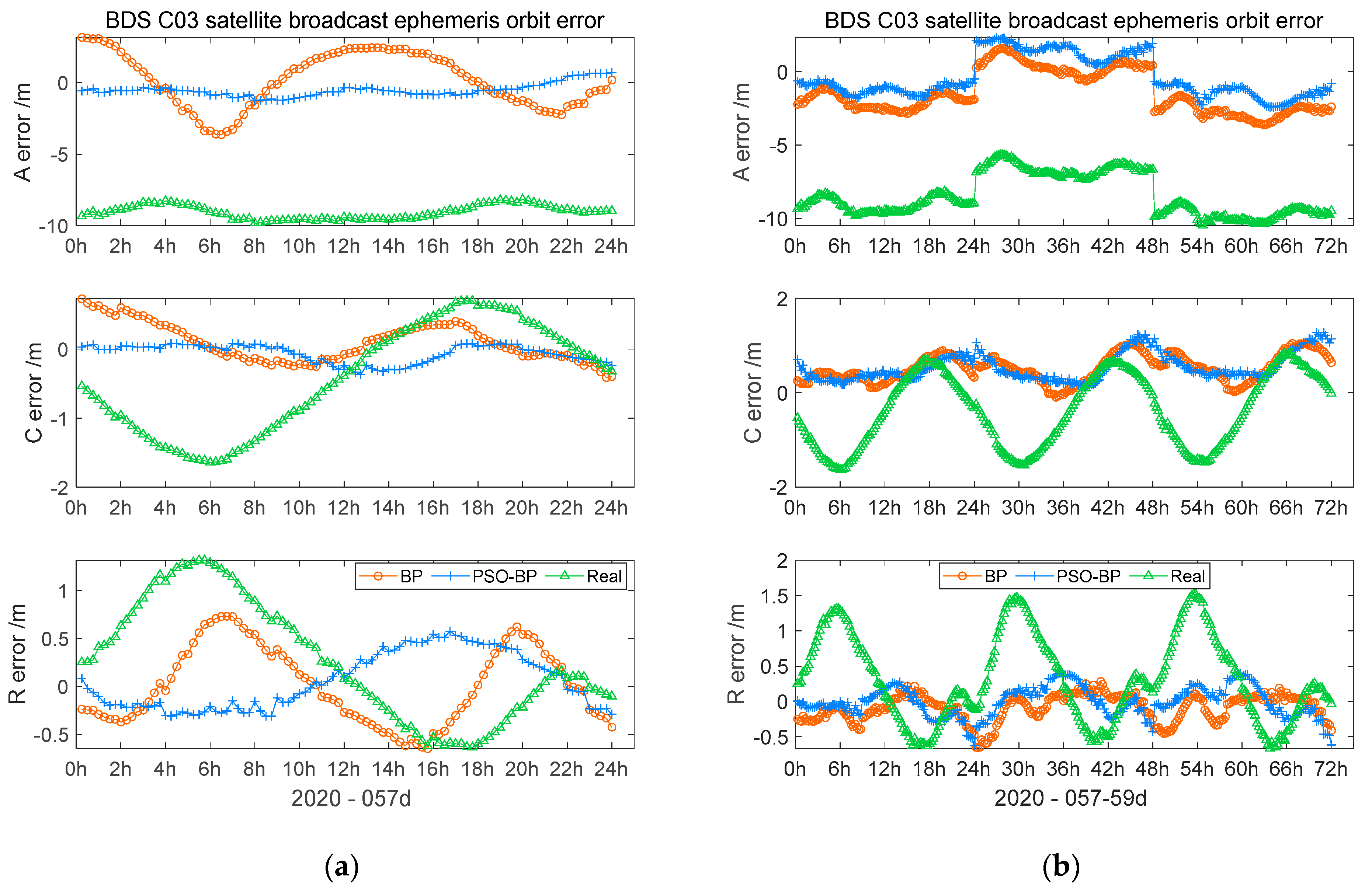
3.1.1. GEO Orbit
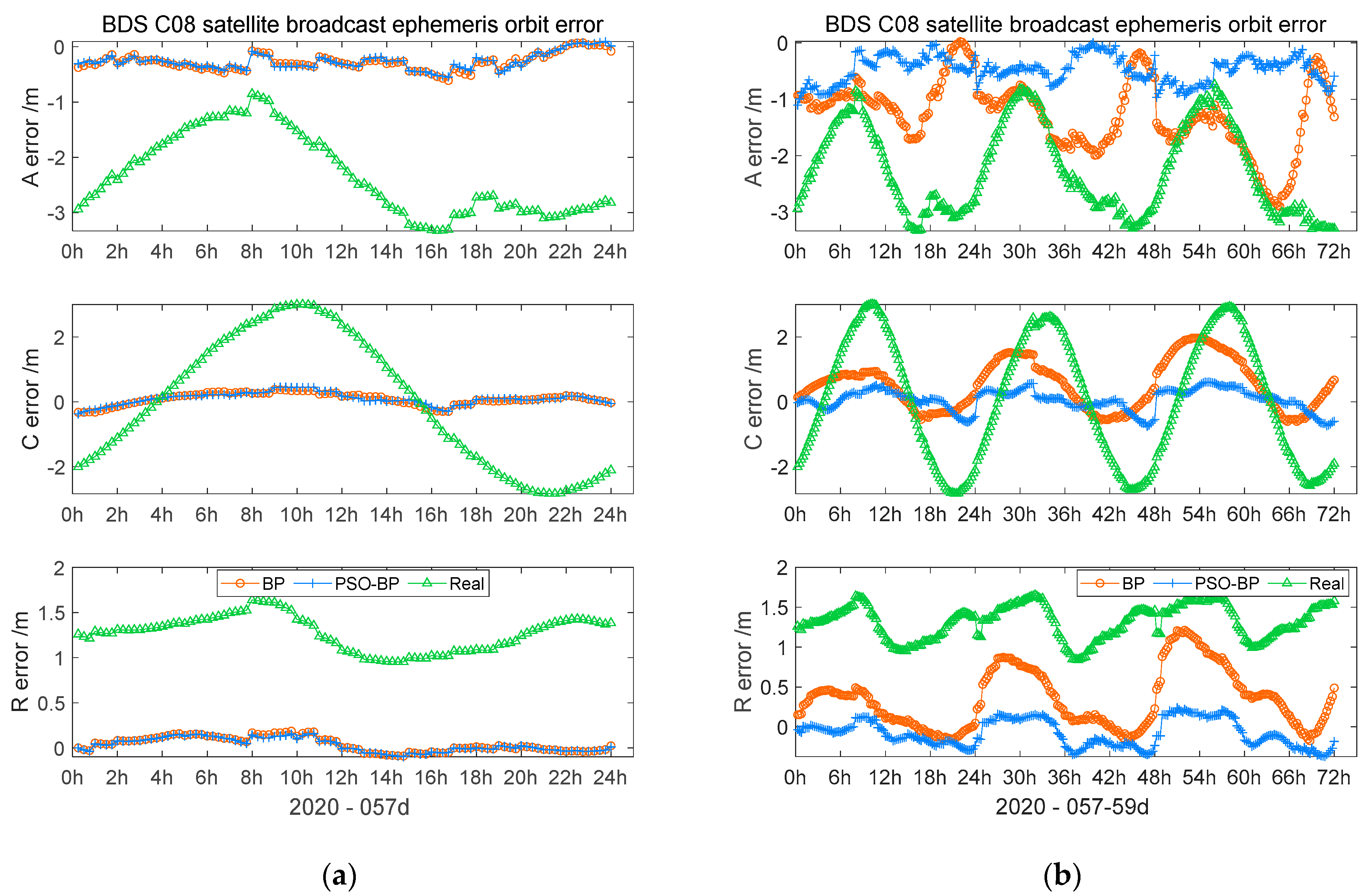
3.1.2. IGSO Orbit
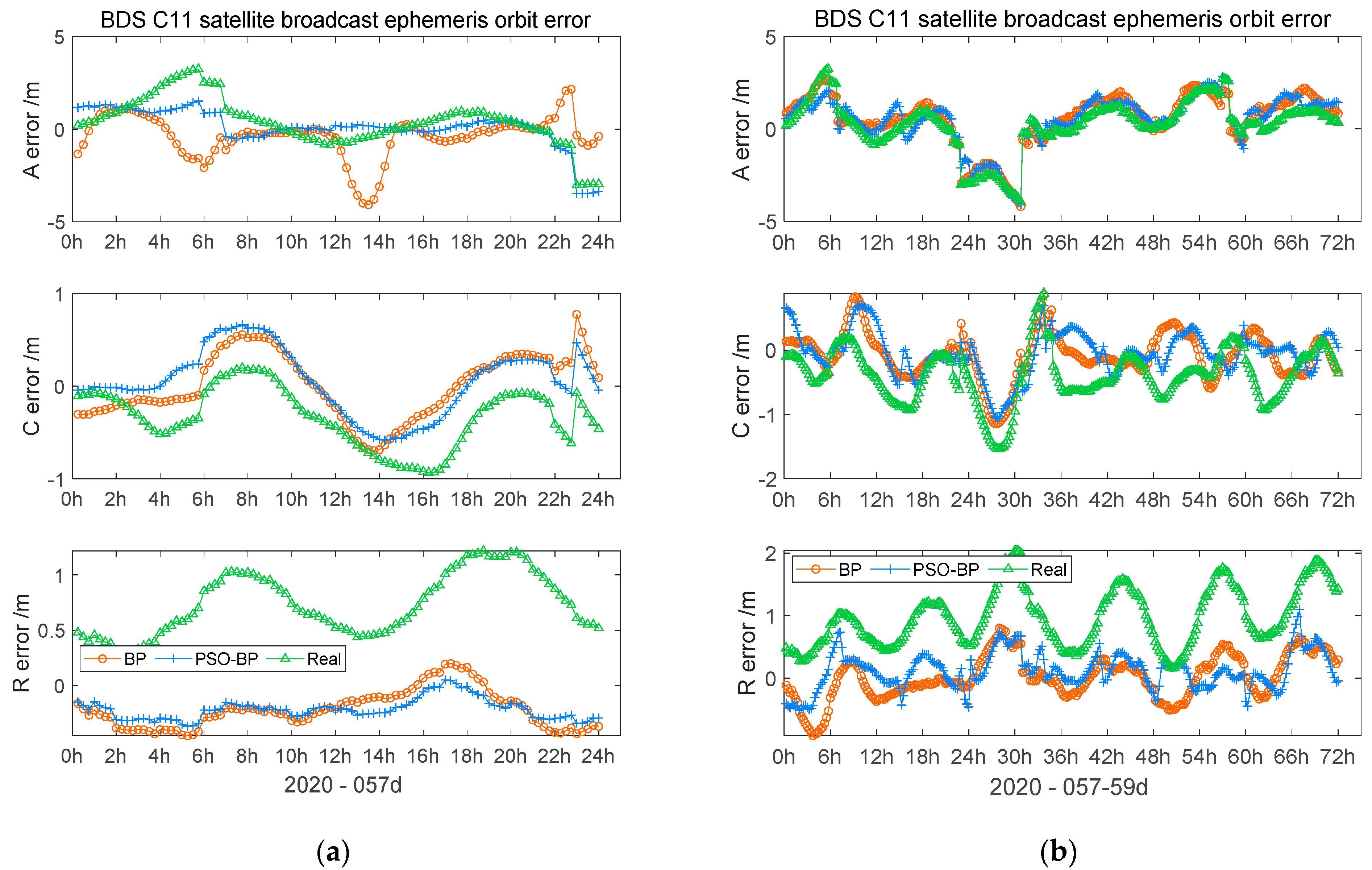
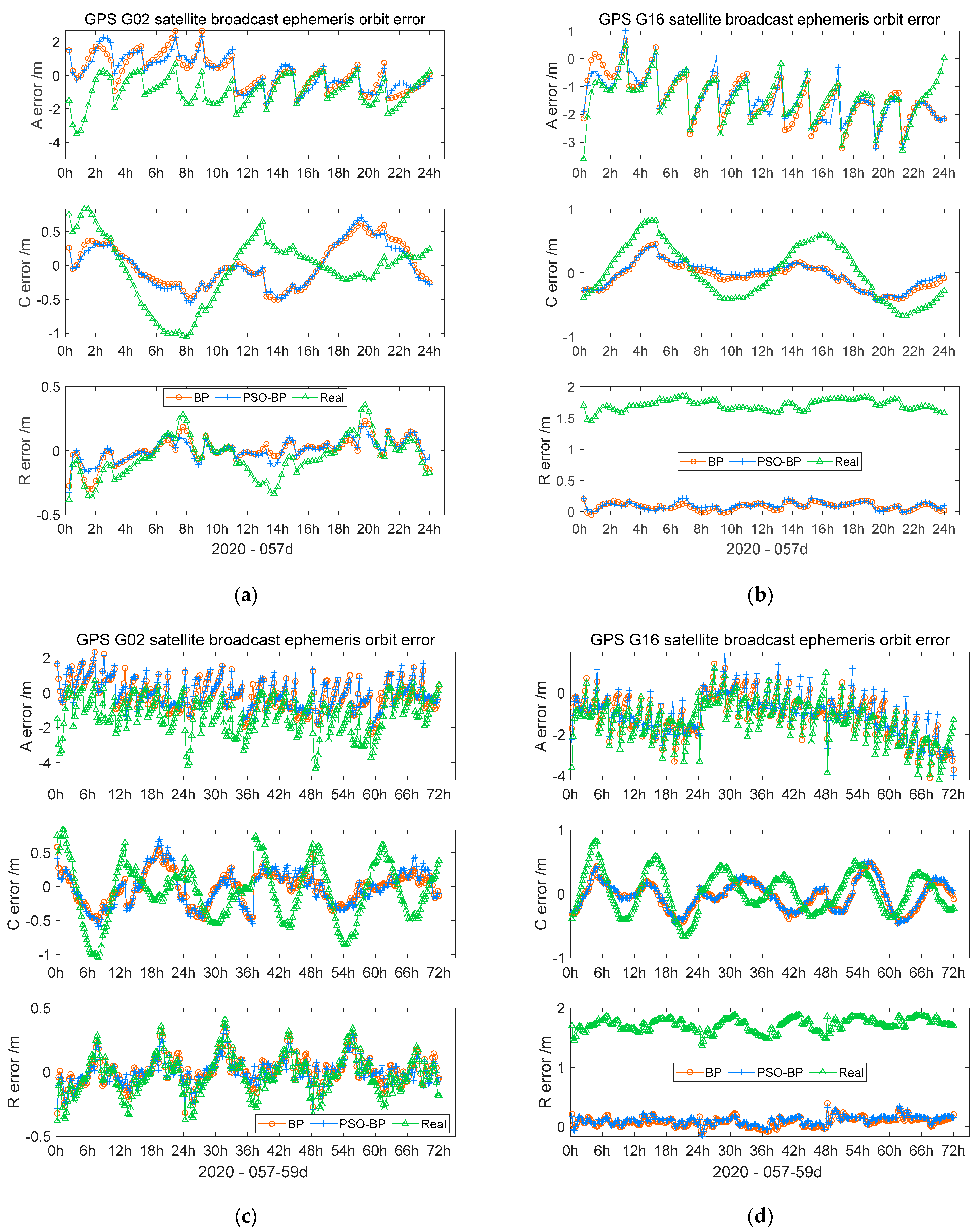
3.1.3. MEO Orbit
4. Discussion
5. Conclusions and Suggestions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ouyang, C.; Shi, J.; Shen, Y.; Li, L. Six-Year BDS-2 Broadcast Navigation Message Analysis from 2013 to 2018: Availability, Anomaly, and SIS UREs Assessment. Sensors 2019, 19, 2767. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiao, G.; Song, S.; Liu, Y.; Su, K.; Cheng, N.; Wang, S. Analysis and Assessment of BDS-2 and BDS-3 Broadcast Ephemeris: Accuracy, the Datum of Broadcast Clocks and Its Impact on Single Point Positioning. Remote Sens. 2020, 12, 2081. [Google Scholar] [CrossRef]
- Tao, G.; Xing, S.; Fang, R.; Xie, X.; Zhao, Q.; Liu, J. BDS Precise Point Positioning for Seismic Displacements Monitoring: Benefit from the High-Rate Satellite Clock Corrections. Sensors 2016, 16, 2192. [Google Scholar]
- Shuren, G.; Hongliang, C.; Yinan, M.; Changjiang, G.; Xiaolin, J.; Yue, M.; Tao, G.; Yongnan, R.; Huijun, Z.; Xin, X. BDS-3 RNSS technical characteristics and service performance. Acta Geod. Cartogr. Sin. 2019, 48, 810–821. [Google Scholar] [CrossRef]
- Tao, G.; Xing, S.; Xiaolong, X.; Xu, X. Research on precise and broadcast ephemeris orbit of BeiDou navigation satellite system. China Sci. 2015, 10, 1023–1026. [Google Scholar]
- Xi, Z.; Zhangjian, L.; Fan, Z. The Evaluation and Comparative Analysis of Four Main GNSS Broadcast Ephemeris Accuracy. Geomat. Inf. Sci. Wuhan Univ. 2020. [Google Scholar] [CrossRef]
- Fan, L.; Jianwen, L.; Hai, H.; Ying, Z. Error Analysis of Orbit Determined by BDS Broadcast Ephemeris. Bull. Surv. Mapp. 2015, 2, 70–72. [Google Scholar] [CrossRef]
- Qianqian, H.; Guo, C.; Guangxing, W.; Shao, X.; Ning, L. Long-Term Orbit Accuracy Analysis of BeiDou Navigation Satellite System Broadcast Ephemeris. In Proceedings of the China Satellite Navigation Conference (CSNC), Harbin, China, 23–25 May 2018. [Google Scholar]
- Qi, Z.; Duo, W.; Wanke, L. Accuracy Assessment of BDS Broadcast Ephemeris Based on Long-Term Data. J. Geod. Geodyn. 2016, 36, 958–962. [Google Scholar] [CrossRef]
- Weiping, L.; Jinming, H.; Zhiwei, L.; Jiantao, X.; Jing, L.; Bo, J. Evaluation and comparative analysis of BDS-3 signal-in-space range error. Acta Geod. Cartogr. Sin. 2020, 49, 1213–1221. [Google Scholar] [CrossRef]
- Jianhua, Z.; Long, Y.; Bo, X.; Tingfeng, X. A Long Duration Orbit Prediction Method for Navigation Satellite. Acta Geod. Cartogr. Sin. 2011, 40, 39–45. [Google Scholar]
- Changdong, J.; Meng, Z.; Qiang, W. Research on the method of high precision orbit prediction for BDS satellite. Sci. Surv. Mapp. 2020, 7, 18–25. [Google Scholar] [CrossRef]
- Xiaojie, L.; Rui, G.; Jin, H.; Lingfeng, Z. Application of Artificial Neural Network to Orbit Prediction of BeiDou Navigation Satellites. Geomat. Inf. Sci. Wuhan Univ. 2015, 9, 1253–1258. [Google Scholar] [CrossRef]
- Yaqi, P.; Chengdong, X.; Fei, N.; Xueen, Z.; Yiwen, W. Prediction model of broadcast ephemeris orbit error based on PSO-BP neural network. Syst. Eng. Electron. 2019, 7, 1617–1622. [Google Scholar]
- Yang, F.; Mou, J.; Cao, Y.; Chu, R. An image encryption algorithm based on bp neural network and hyperchaotic system. China Commun. 2020, 17, 21–28. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Z.; Liang, Z.; Zhu, S.P.; Correia, J.A.; De Jesus, A.M. Pso-bp neural network-based strain prediction of wind turbine blades. Materials 2019, 12, 1889. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.W.; Cao, K. Establishment and application of intelligent city building information model based on BP neural network model. Comput. Commun. 2020, 153, 382–389. [Google Scholar] [CrossRef]
- Chang, Y.; Yue, J.; Guo, R.; Liu, W.; Li, L. Penetration quality prediction of asymmetrical fillet root welding based on optimized bp neural network. J. Manuf. Process. 2020, 50, 247–254. [Google Scholar] [CrossRef]
- Kshirsagar, P.; Akojwar, S. Optimization of BPNN Parameters Using PSO for EEG Signals. In Proceedings of the International Conference on Communication and Signal Processing 2016 (ICCASP 2016), Lonere, India, 26–27 December 2016. [Google Scholar]
- Ren, C.; An, N.; Wang, J.; Li, L.; Hu, B.; Shang, D. Optimal parameters selection for BP neural network based on particle swarm optimization: A case study of wind speed forecasting. Knowl.-Based Syst. 2014, 56, 226–239. [Google Scholar] [CrossRef]
- Li, T.; Sun, J.; Wang, L. An intelligent optimization method of motion management system based on BP neural network. Neural Comput. Appl. 2020, 33, 707–722. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Days | Direction | Along-Track | Cross-Track | Radial-Track | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Model | Mean/m | STD/m | RMS/m | Mean/m | STD/m | RMS/m | Mean/m | STD/m | RMS/m | |
| 1 d | Real | −9.06 | 0.47 | 9.07 | −0.43 | 0.78 | 0.89 | 0.26 | 0.61 | 0.66 |
| BP | 0.18 | 1.92 | 1.91 | 0.10 | 0.28 | 0.29 | 0.01 | 0.40 | 0.40 | |
| PSO–BP | −0.73 | 0.46 | 0.87 | −0.05 | 0.14 | 0.15 | −0.02 | 0.10 | 0.10 | |
| 3 d | Real | −8.48 | 1.42 | 8.60 | −0.39 | 0.77 | 0.86 | 0.32 | 0.62 | 0.70 |
| BP | −1.43 | 1.45 | 2.03 | 0.52 | 0.29 | 0.60 | −0.09 | 0.19 | 0.21 | |
| PSO–BP | −0.38 | 1.41 | 1.46 | 0.55 | 0.29 | 0.62 | −0.01 | 0.22 | 0.22 | |
| Days | Direction | Along-Track | Cross-Track | Radial-Track | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Model | Mean/m | STD/m | RMS/m | Mean/m | STD/m | RMS/m | Mean/m | STD/m | RMS/m | |
| 1 d | Real | −2.33 | 0.74 | 2.44 | −0.03 | 2.01 | 2.00 | 1.27 | 0.19 | 1.29 |
| BP | −0.28 | 0.15 | 0.31 | 0.08 | 0.19 | 0.21 | 0.04 | 0.08 | 0.09 | |
| PSO–BP | −0.27 | 0.15 | 0.30 | 0.10 | 0.18 | 0.21 | 0.03 | 0.07 | 0.08 | |
| 3 d | Real | −2.26 | 0.80 | 2.39 | 0.03 | 1.93 | 1.93 | 1.32 | 0.22 | 1.33 |
| BP | −1.27 | 0.63 | 1.41 | 0.52 | 0.76 | 0.92 | 0.35 | 0.37 | 0.51 | |
| PSO–BP | −0.47 | 0.24 | 0.53 | 0.06 | 0.33 | 0.33 | −0.08 | 0.17 | 0.19 | |
| Days | Direction | Along-Track | Cross-Track | Radial-Track | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Model | Mean/m | STD/m | RMS/m | Mean/m | STD/m | RMS/m | Mean/m | STD/m | RMS/m | |
| 1 d | Real | 0.40 | 1.30 | 1.35 | −0.33 | 0.32 | 0.46 | 0.74 | 0.28 | 0.79 |
| BP | −0.38 | 1.14 | 1.20 | 0.01 | 0.35 | 0.35 | −0.21 | 0.17 | 0.27 | |
| PSO–BP | 0.11 | 1.03 | 1.03 | 0.05 | 0.35 | 0.35 | −0.21 | 0.09 | 0.23 | |
| 3 d | Real | 0.22 | 1.40 | 1.41 | −0.39 | 0.42 | 0.57 | 0.97 | 0.47 | 1.08 |
| BP | 0.56 | 1.40 | 1.51 | −0.08 | 0.36 | 0.37 | 0.01 | 0.35 | 0.35 | |
| PSO–BP | 0.52 | 1.33 | 1.43 | −0.04 | 0.35 | 0.35 | 0.12 | 0.29 | 0.32 | |
| PRN | RMS(3D)/m (1 Day) | Improvement Rate (1 Day) | RMS(3D)/m (3 Days) | Improvement Rate (3 Days) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Real | BP | PSO–BP | BP | PSO–BP | Real | BP | PSO–BP | BP | PSO–BP | |
| C01 | 2.57 | 1.37 | 1.57 | 47% | 39% | 2.88 | 1.79 | 1.67 | 38% | 42% |
| C03 | 9.14 | 1.98 | 0.77 | 78% | 92% | 8.67 | 2.13 | 1.60 | 75% | 82% |
| C04 | 9.77 | 3.70 | 2.54 | 62% | 74% | 9.26 | 2.93 | 1.79 | 68% | 81% |
| C06 | 1.85 | 0.41 | 0.40 | 78% | 78% | 1.91 | 0.67 | 0.74 | 65% | 61% |
| C07 | 3.42 | 0.34 | 0.36 | 90% | 89% | 3.09 | 1.33 | 1.18 | 57% | 62% |
| C08 | 3.41 | 0.38 | 0.38 | 89% | 89% | 3.35 | 1.76 | 0.65 | 47% | 81% |
| C09 | 2.47 | 0.33 | 0.34 | 87% | 86% | 2.43 | 0.70 | 0.57 | 71% | 77% |
| C10 | 3.48 | 0.78 | 0.77 | 78% | 78% | 3.21 | 1.01 | 0.99 | 68% | 69% |
| C11 | 1.63 | 1.28 | 1.12 | 21% | 32% | 1.87 | 1.59 | 1.51 | 15% | 19% |
| C12 | 3.38 | 7.14 | 3.24 | −111% | 4% | 3.37 | 2.96 | 2.92 | 12% | 14% |
| C14 | 1.77 | 4.61 | 0.93 | −161% | 48% | 3.74 | 3.37 | 3.39 | 10% | 9% |
| C16 | 1.87 | 0.80 | 0.67 | 57% | 64% | 1.83 | 0.89 | 0.87 | 51% | 53% |
| Days | PRN | Direction | Along-Track | Cross-Track | Radial-Track | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Model | Mean/m | STD/m | RMS/m | Mean/m | STD/m | RMS/m | Mean/m | STD/m | RMS/m | ||
| 1 d | G02 | Real | −0.93 | 0.88 | 1.28 | −0.06 | 0.48 | 0.48 | −0.05 | 0.16 | 0.16 |
| BP | 0.17 | 1.02 | 1.03 | 0.01 | 0.31 | 0.31 | 0.01 | 0.10 | 0.10 | ||
| PSO–BP | 0.20 | 1.00 | 1.01 | −0.01 | 0.32 | 0.31 | 0.01 | 0.08 | 0.08 | ||
| G16 | Real | −1.42 | 0.76 | 1.61 | 0.01 | 0.43 | 0.42 | 1.70 | 0.09 | 1.70 | |
| BP | −1.42 | 0.82 | 1.64 | −0.06 | 0.20 | 0.21 | 0.09 | 0.06 | 0.10 | ||
| PSO–BP | −1.40 | 0.78 | 1.60 | −0.03 | 0.20 | 0.20 | 0.10 | 0.06 | 0.11 | ||
| 3 d | G02 | Real | −1.28 | 1.04 | 1.65 | −0.08 | 0.43 | 0.43 | −0.03 | 0.15 | 0.16 |
| BP | −0.12 | 0.85 | 0.86 | −0.02 | 0.24 | 0.24 | 0.01 | 0.11 | 0.11 | ||
| PSO–BP | 0.00 | 0.84 | 0.84 | 0.02 | 0.27 | 0.27 | 0.00 | 0.10 | 0.10 | ||
| G16 | Real | −1.36 | 0.98 | 1.67 | 0.03 | 0.31 | 0.32 | 1.71 | 0.11 | 1.72 | |
| BP | −1.10 | 0.99 | 1.48 | −0.03 | 0.22 | 0.22 | 0.09 | 0.08 | 0.11 | ||
| PSO–BP | −1.01 | 0.98 | 1.41 | −0.02 | 0.22 | 0.22 | 0.11 | 0.07 | 0.13 | ||
| PRN | RMS(3D)/m (1 Day) | Improvement Rate (1 Day) | RMS(3D)/m (3 Days) | Improvement Rate (3 Days) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Real | BP | PSO–BP | BP | PSO–BP | Real | BP | PSO–BP | BP | PSO–BP | |
| G01 | 1.66 | 1.18 | 1.09 | 29% | 34% | 1.58 | 1.50 | 1.29 | 5% | 18% |
| G02 | 1.37 | 1.08 | 1.06 | 21% | 23% | 1.71 | 0.90 | 0.89 | 47% | 48% |
| G03 | 1.65 | 1.25 | 1.17 | 24% | 29% | 1.93 | 1.02 | 1.02 | 47% | 47% |
| G04 | 1.68 | 0.82 | 0.81 | 51% | 52% | 1.75 | 0.85 | 0.87 | 51% | 50% |
| G05 | 0.94 | 0.81 | 0.77 | 14% | 18% | 1.06 | 0.93 | 0.89 | 12% | 17% |
| G06 | 1.68 | 0.95 | 0.94 | 43% | 44% | 1.69 | 0.99 | 0.97 | 41% | 43% |
| G07 | 1.56 | 0.96 | 0.86 | 38% | 45% | 1.33 | 1.24 | 1.23 | 7% | 8% |
| G08 | 1.66 | 1.14 | 1.15 | 31% | 30% | 1.79 | 1.07 | 1.08 | 40% | 39% |
| G09 | 1.56 | 0.88 | 0.89 | 43% | 43% | 1.62 | 0.84 | 0.83 | 48% | 49% |
| G10 | 1.63 | 1.19 | 1.18 | 26% | 28% | 1.85 | 1.11 | 1.14 | 40% | 38% |
| G11 | 1.64 | 1.04 | 1.05 | 36% | 36% | 1.79 | 1.03 | 1.07 | 42% | 40% |
| G12 | 0.85 | 0.70 | 0.63 | 18% | 25% | 0.97 | 0.81 | 0.83 | 16% | 14% |
| G13 | 1.86 | 0.92 | 0.81 | 51% | 56% | 2.16 | 1.13 | 1.17 | 48% | 46% |
| G14 | 1.85 | 0.93 | 0.99 | 50% | 47% | 1.83 | 0.92 | 0.95 | 50% | 48% |
| G16 | 2.39 | 1.66 | 1.62 | 30% | 32% | 2.42 | 1.50 | 1.43 | 38% | 41% |
| G18 | 1.77 | 1.05 | 0.95 | 41% | 47% | 1.71 | 1.06 | 0.94 | 38% | 45% |
| G19 | 3.30 | 1.49 | 1.89 | 55% | 43% | 2.99 | 2.26 | 2.32 | 24% | 23% |
| G20 | 2.13 | 0.63 | 0.64 | 71% | 70% | 1.94 | 1.02 | 1.07 | 47% | 45% |
| G21 | 1.98 | 1.05 | 1.05 | 47% | 47% | 2.00 | 0.98 | 0.96 | 51% | 52% |
| G22 | 0.85 | 0.85 | 0.86 | 0% | −1% | 1.33 | 1.20 | 1.19 | 9% | 10% |
| G23 | 1.34 | 0.83 | 0.83 | 38% | 38% | 1.15 | 0.94 | 1.09 | 18% | 5% |
| G24 | 1.80 | 1.28 | 1.30 | 29% | 28% | 1.76 | 1.56 | 1.52 | 11% | 14% |
| G25 | 1.68 | 0.98 | 0.94 | 42% | 44% | 1.72 | 1.21 | 1.19 | 30% | 31% |
| G26 | 1.41 | 0.92 | 0.90 | 35% | 37% | 1.48 | 1.28 | 1.23 | 13% | 16% |
| G27 | 1.51 | 0.89 | 0.76 | 41% | 50% | 1.54 | 0.88 | 0.85 | 43% | 45% |
| G28 | 1.78 | 0.78 | 0.83 | 56% | 53% | 1.80 | 0.88 | 0.98 | 51% | 46% |
| G29 | 0.80 | 1.07 | 0.98 | −34% | −22% | 1.00 | 1.24 | 1.23 | −24% | −23% |
| G30 | 1.98 | 1.28 | 1.19 | 35% | 40% | 1.72 | 1.27 | 1.29 | 26% | 25% |
| G31 | 0.98 | 0.99 | 1.01 | −2% | −3% | 0.91 | 0.86 | 0.87 | 5% | 4% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Niu, F.; Su, X.; Geng, T.; Liu, Z.; Li, Q. Initial Results of Modeling and Improvement of BDS-2/GPS Broadcast Ephemeris Satellite Orbit Based on BP and PSO-BP Neural Networks. Remote Sens. 2021, 13, 4801. https://doi.org/10.3390/rs13234801
Chen H, Niu F, Su X, Geng T, Liu Z, Li Q. Initial Results of Modeling and Improvement of BDS-2/GPS Broadcast Ephemeris Satellite Orbit Based on BP and PSO-BP Neural Networks. Remote Sensing. 2021; 13(23):4801. https://doi.org/10.3390/rs13234801
Chicago/Turabian StyleChen, Hanlin, Fei Niu, Xing Su, Tao Geng, Zhimin Liu, and Qiang Li. 2021. "Initial Results of Modeling and Improvement of BDS-2/GPS Broadcast Ephemeris Satellite Orbit Based on BP and PSO-BP Neural Networks" Remote Sensing 13, no. 23: 4801. https://doi.org/10.3390/rs13234801