
A Universal Fuzzy Logic Optical Water Type Scheme for the Global Oceans


Abstract
:
1. Introduction
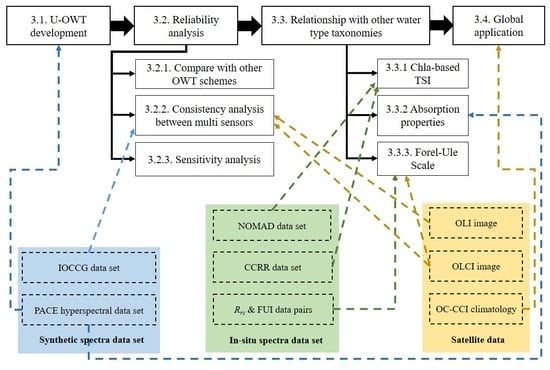
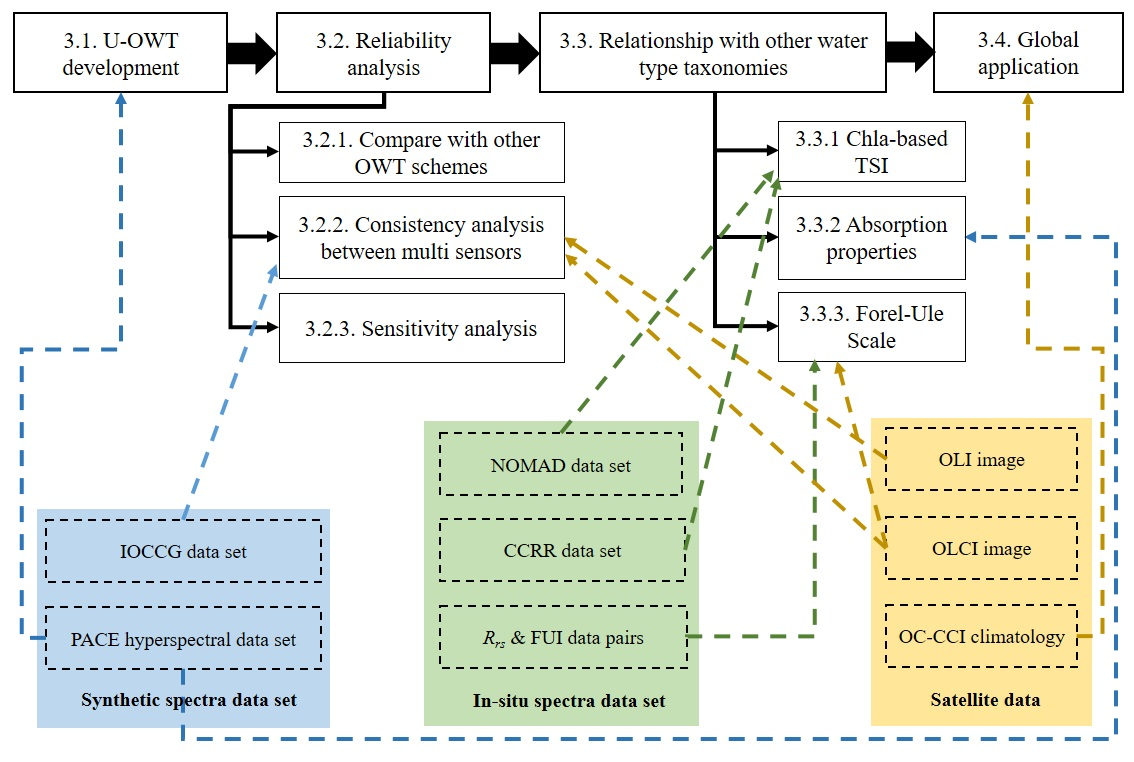
2. Materials and Methods
2.1. Materials
2.1.1. Synthetic Data
2.1.2. In Situ Data
2.1.3. Satellite Images
2.1.4. Other Data
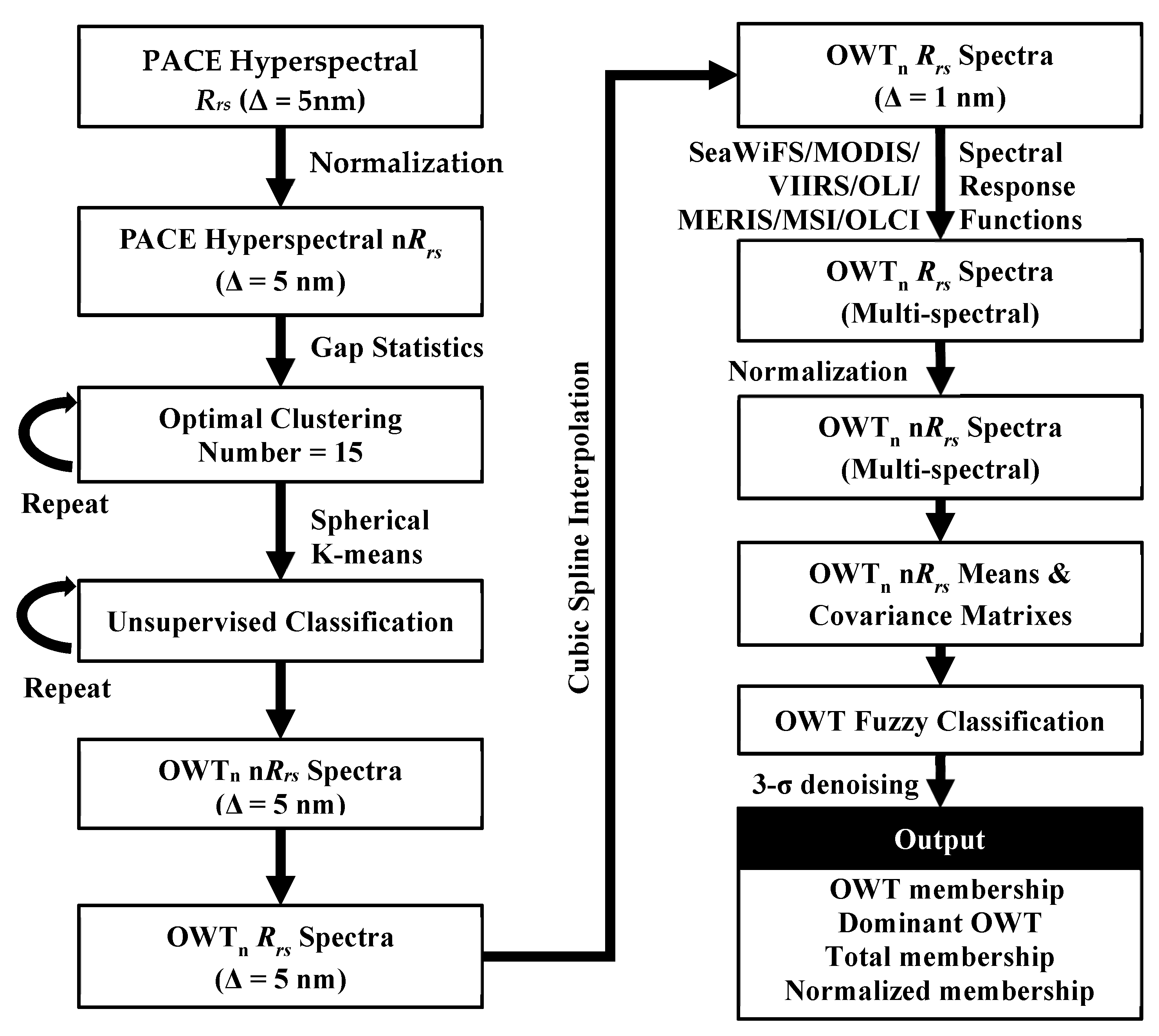
2.2. Development of the U-OWT
2.3. Reliability Analysis of the U-OWT
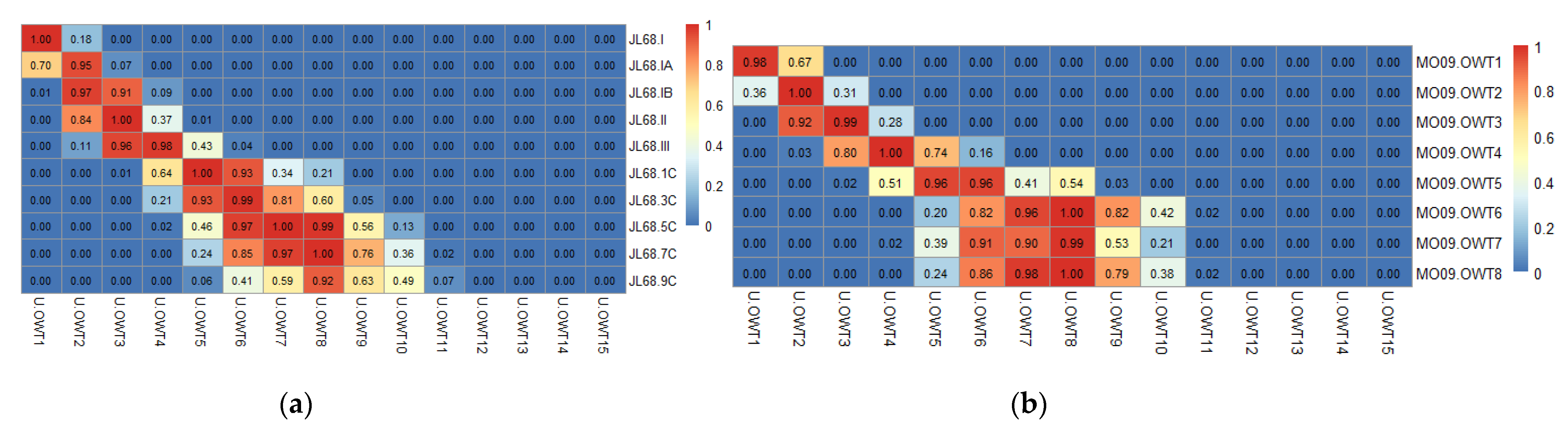
2.3.1. Existing AOP-Based OWT Schemes
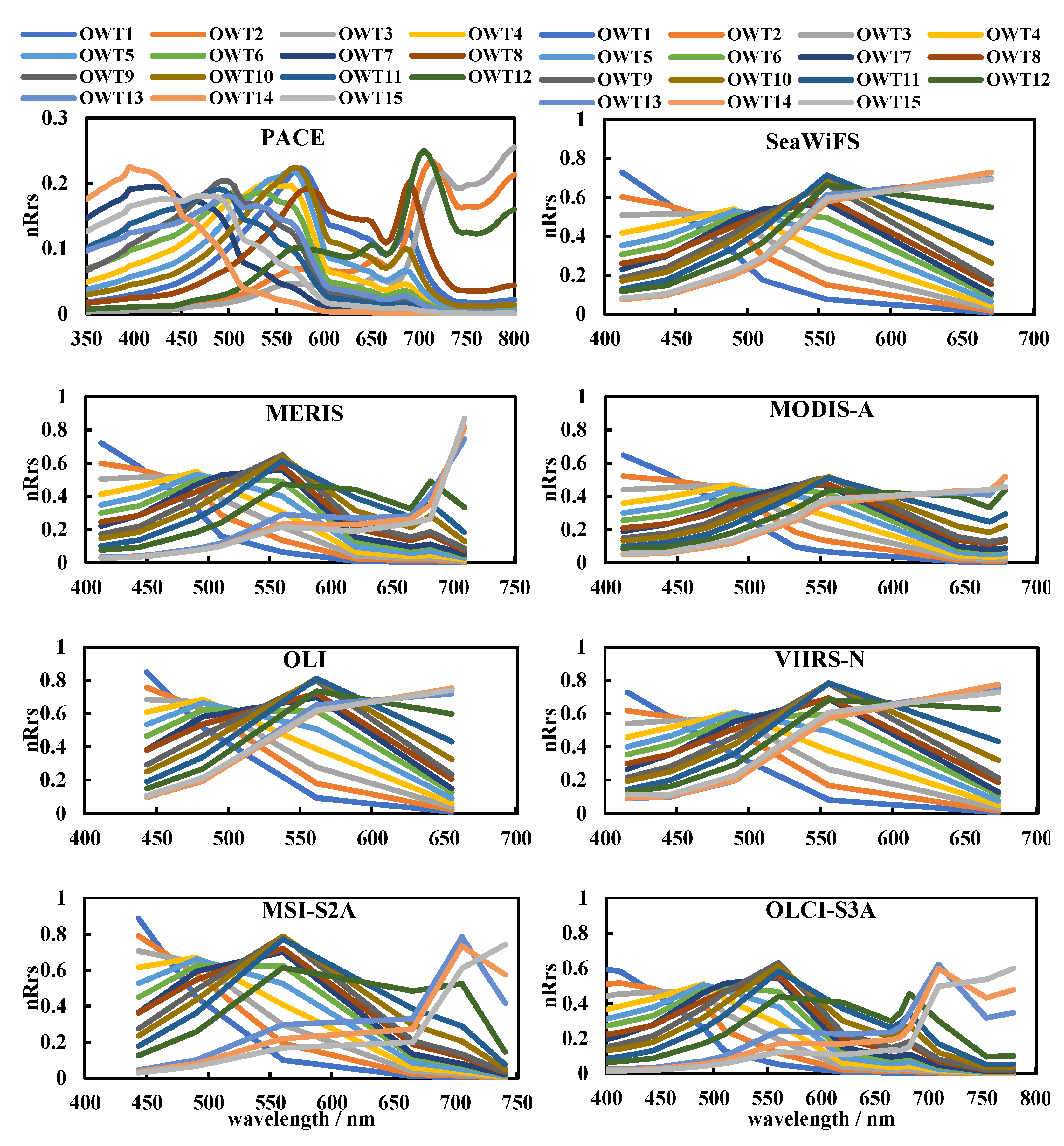
2.3.2. Consistency Evaluation of U-OWT Performance on Different Sensors
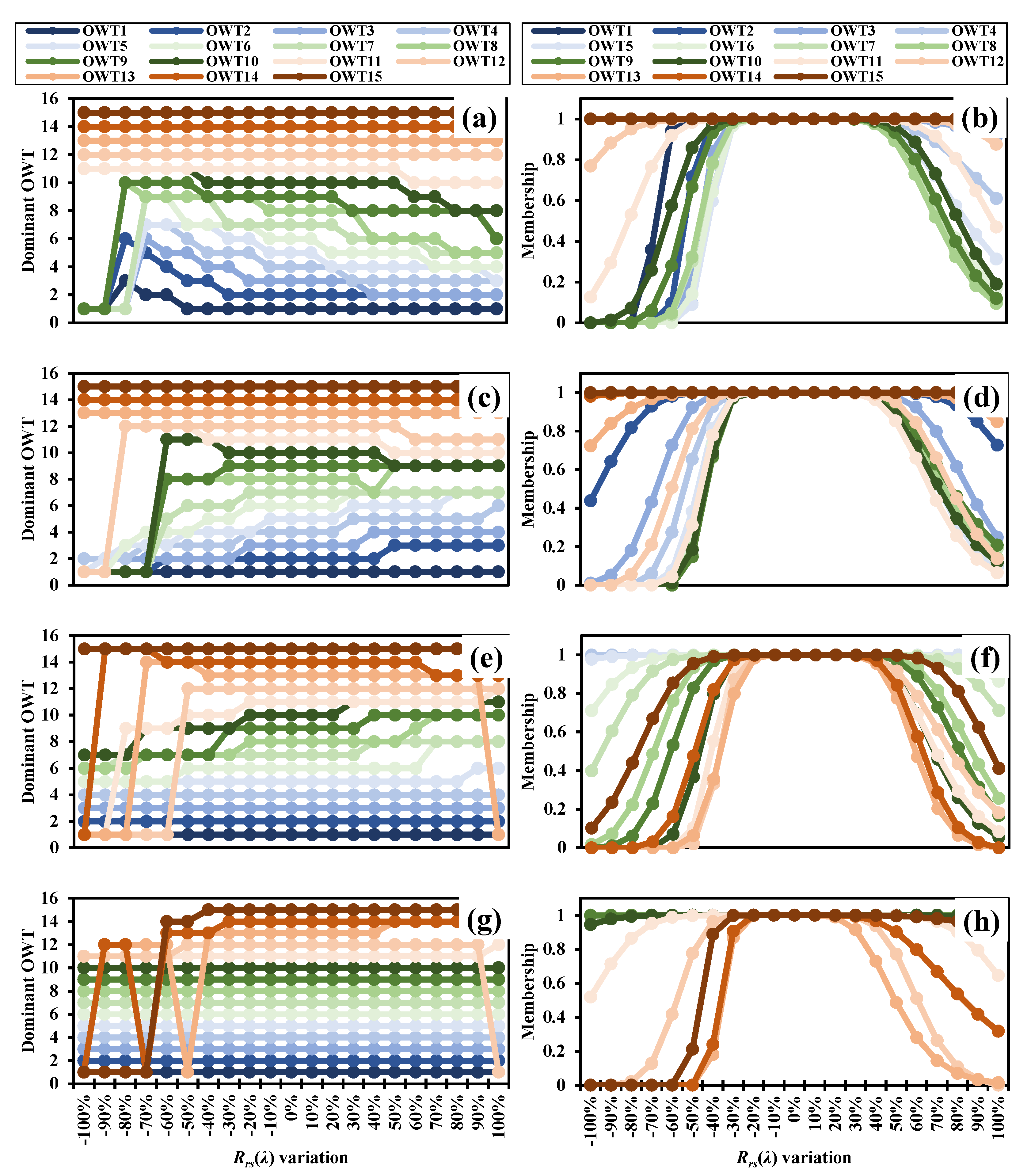
2.3.3. Sensitivity Analysis of the U-OWT
2.4. Other Water Classification Taxonomies
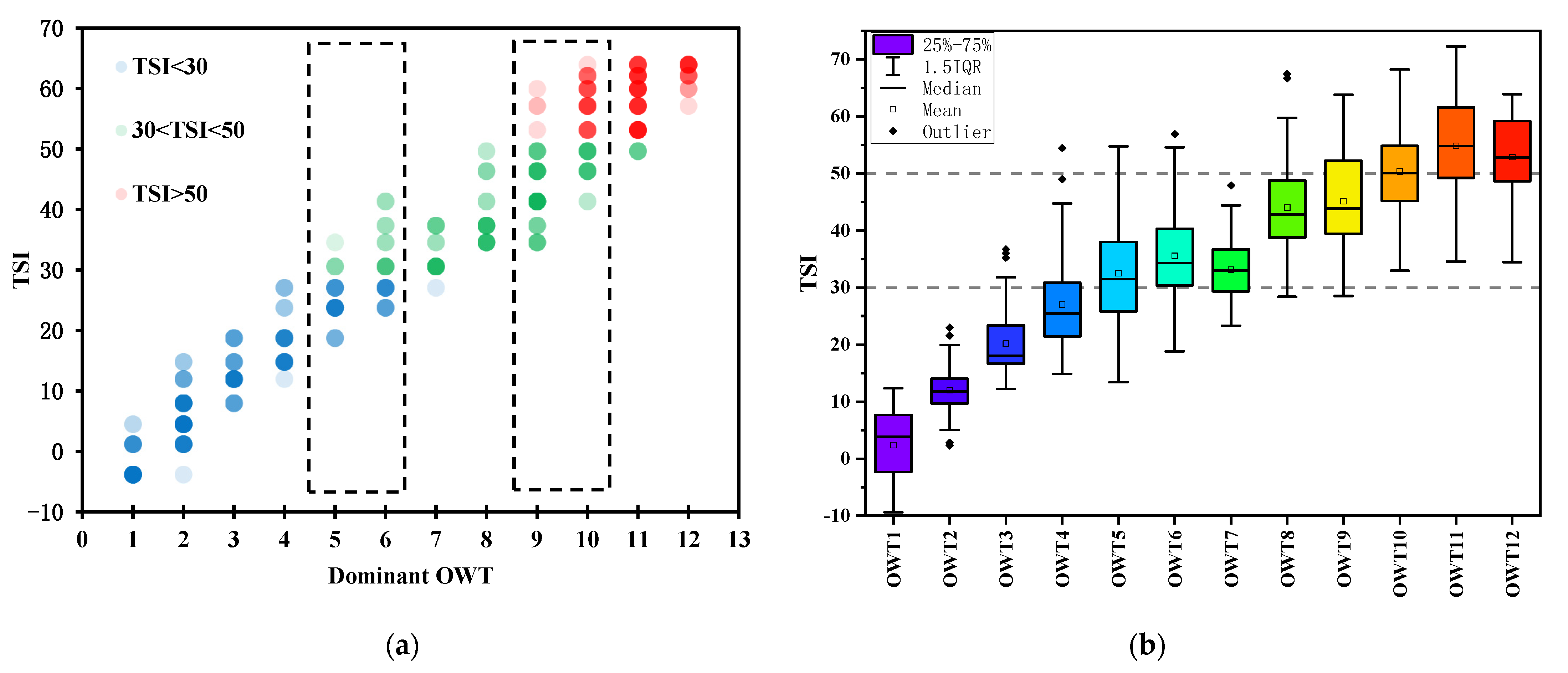
2.4.1. Chla-Based TSI
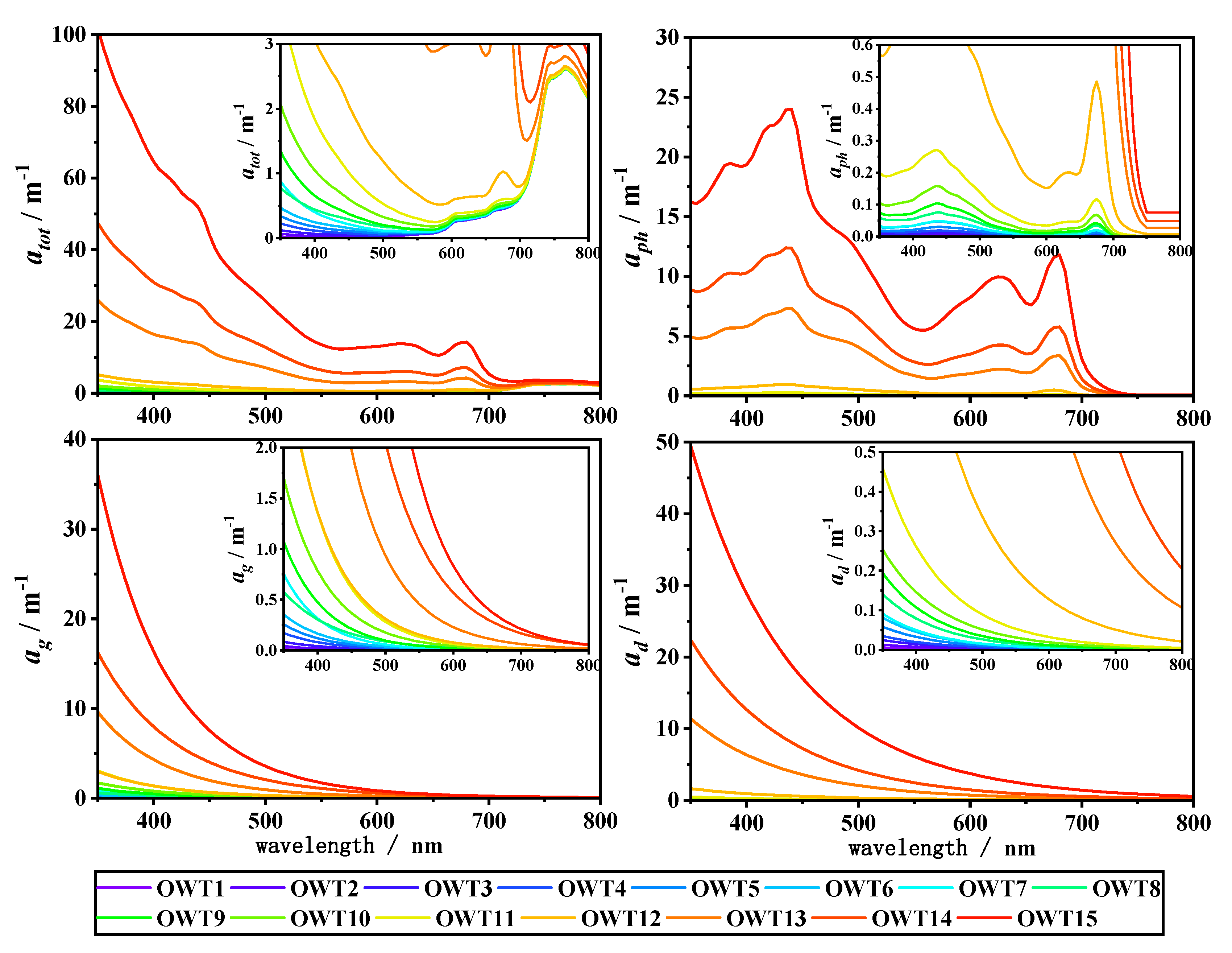
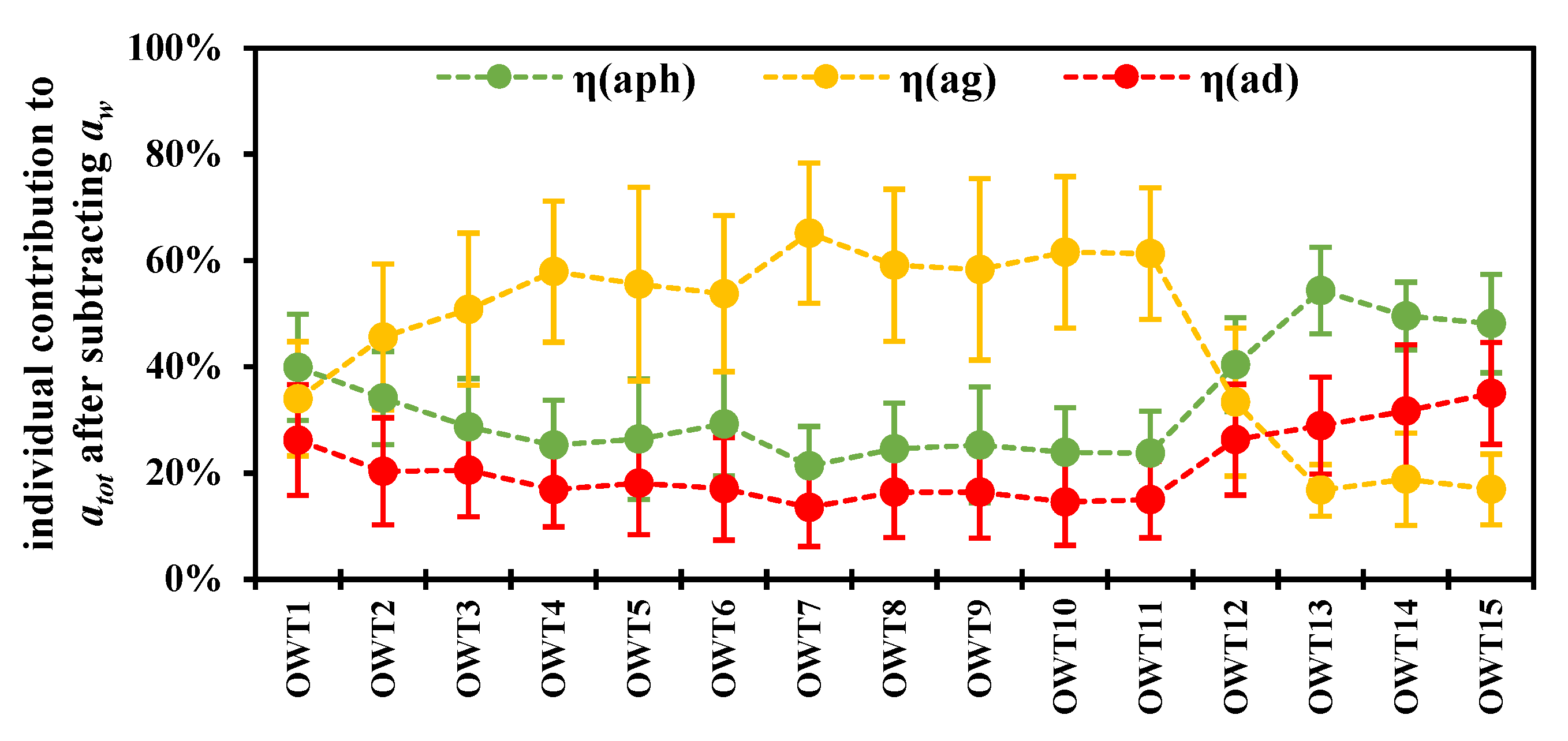
2.4.2. IOP-Based Classification
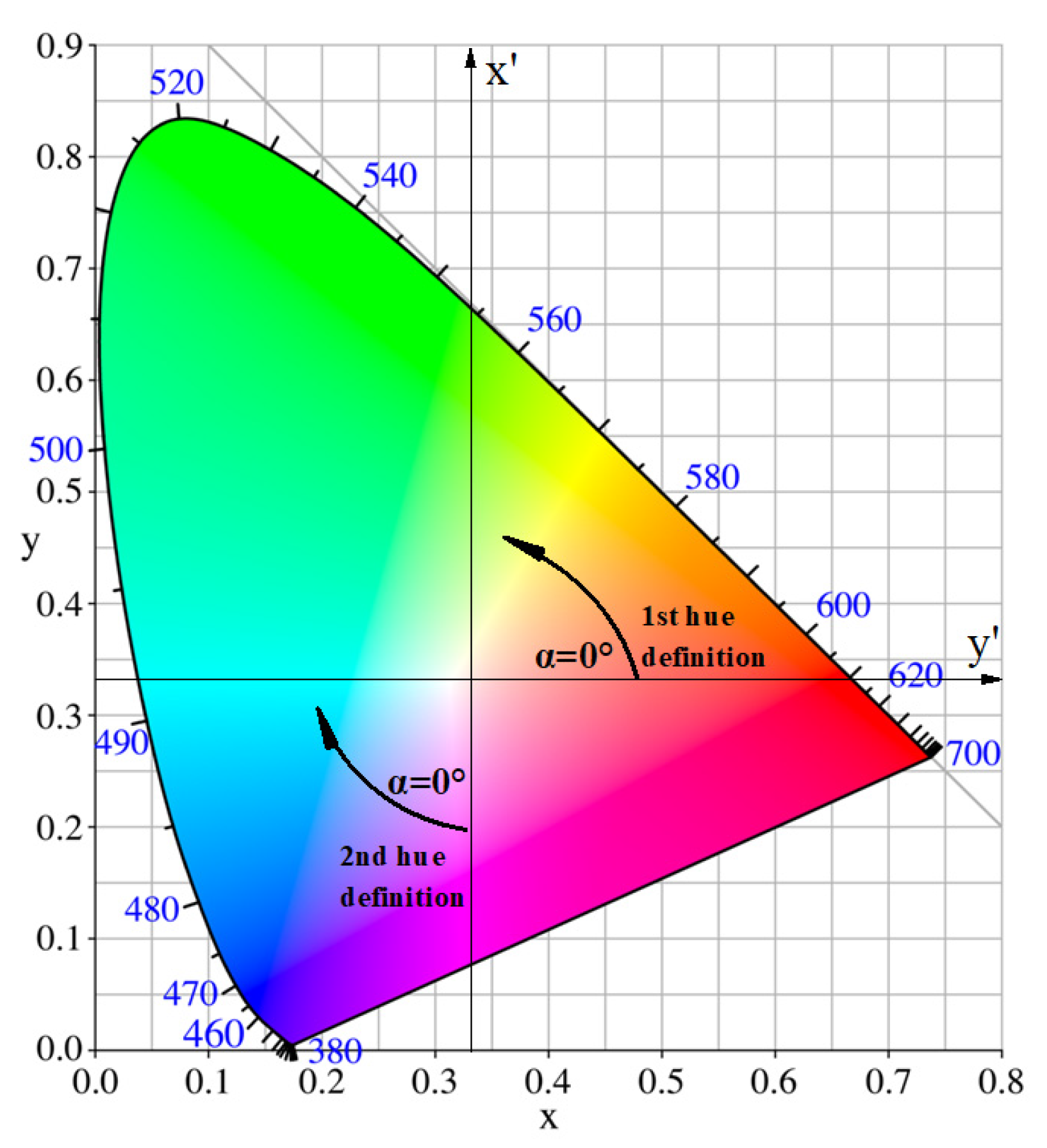
2.4.3. Forel-Ule Scale
- (1)
- CIE tristimulus calculation:
- (2)
- CIE chromaticity coordinates calculation:
- (3)
- Hue angle calculation. The hue angle under the Woerd and Wernand (2015) definition (namely the first hue definition) [36] is obtained:
2.5. Global Ocean Applications of the U-OWT
3. Results
3.1. U-OWT Cluster Analysis
3.2. Reliability of the U-OWT
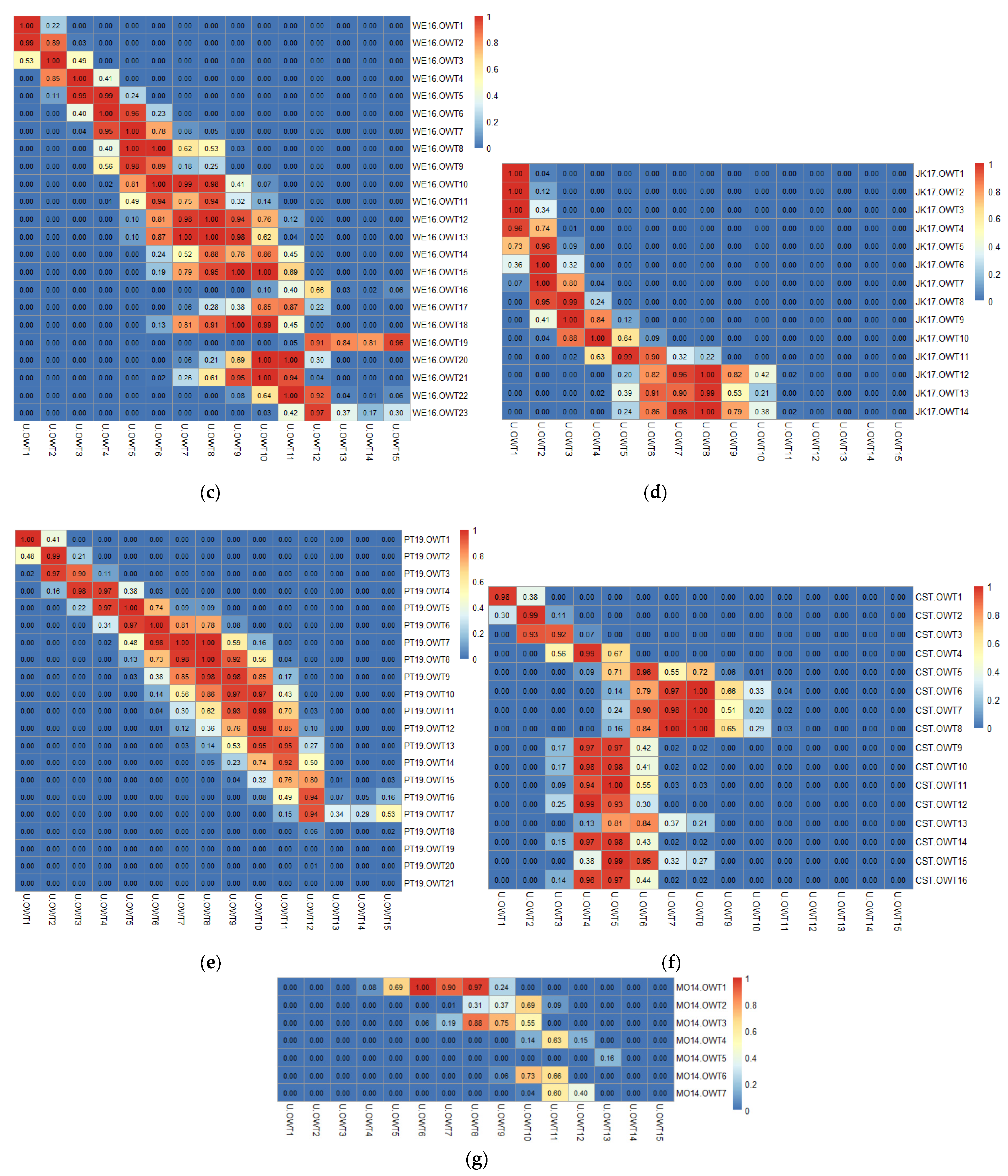
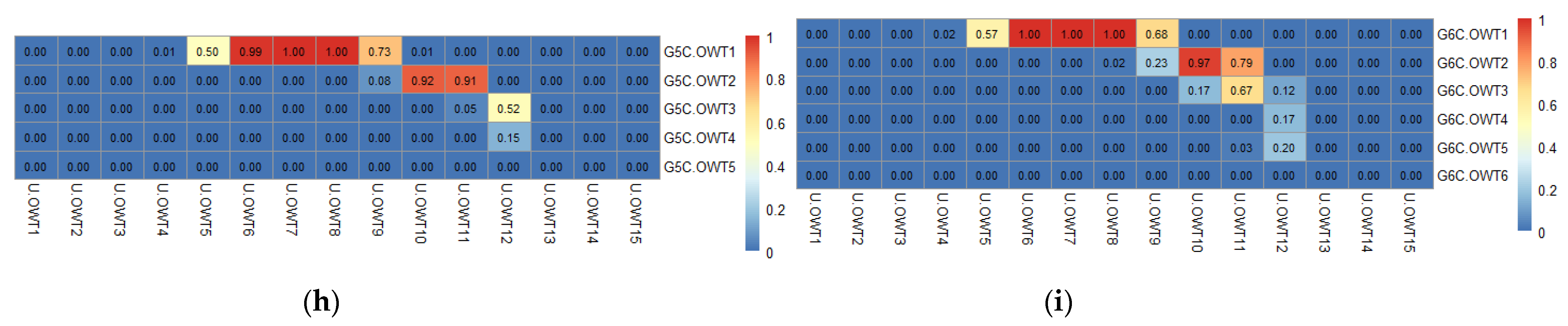
3.2.1. Inter-Comparison with Other AOP-based OWT Schemes
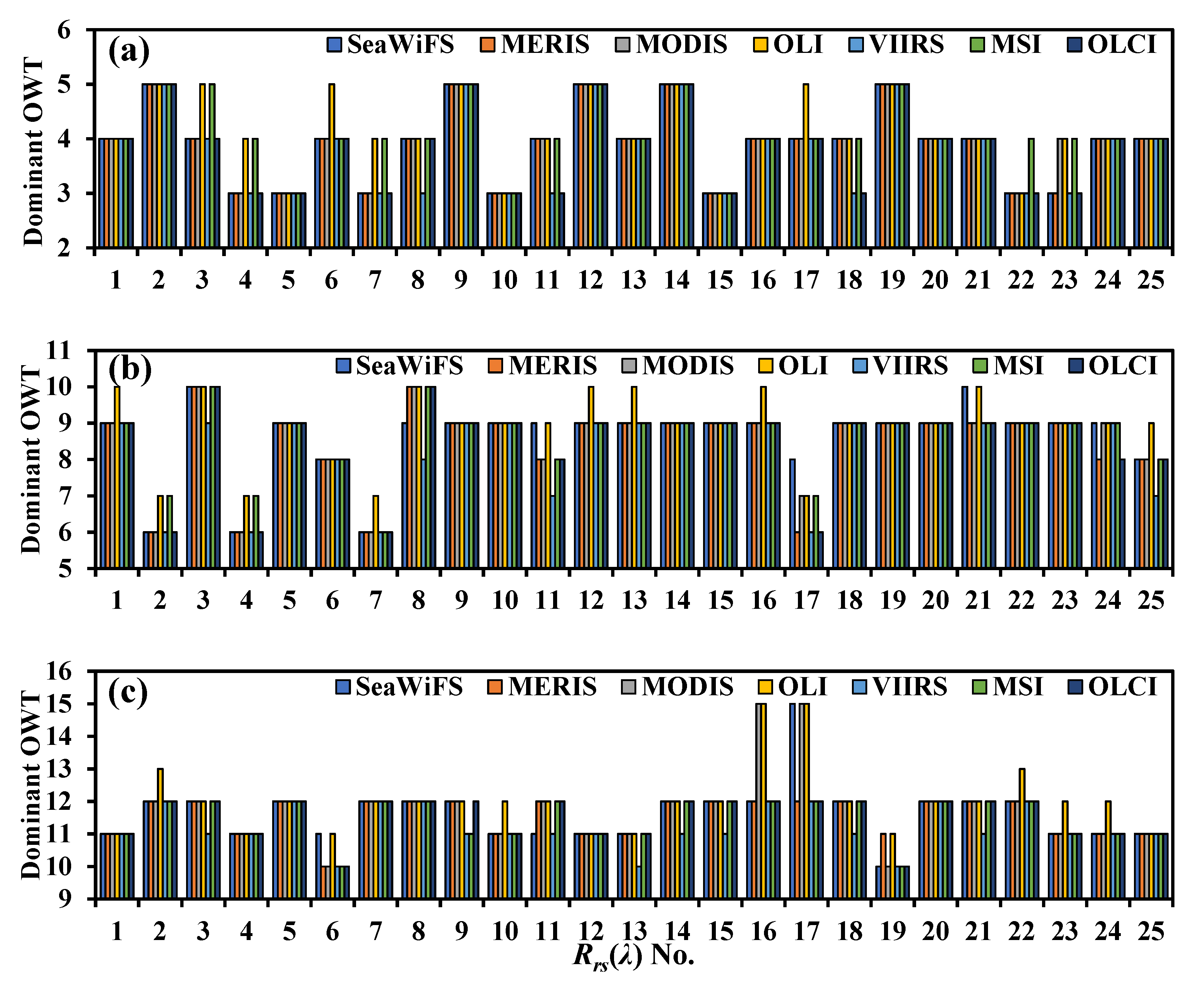
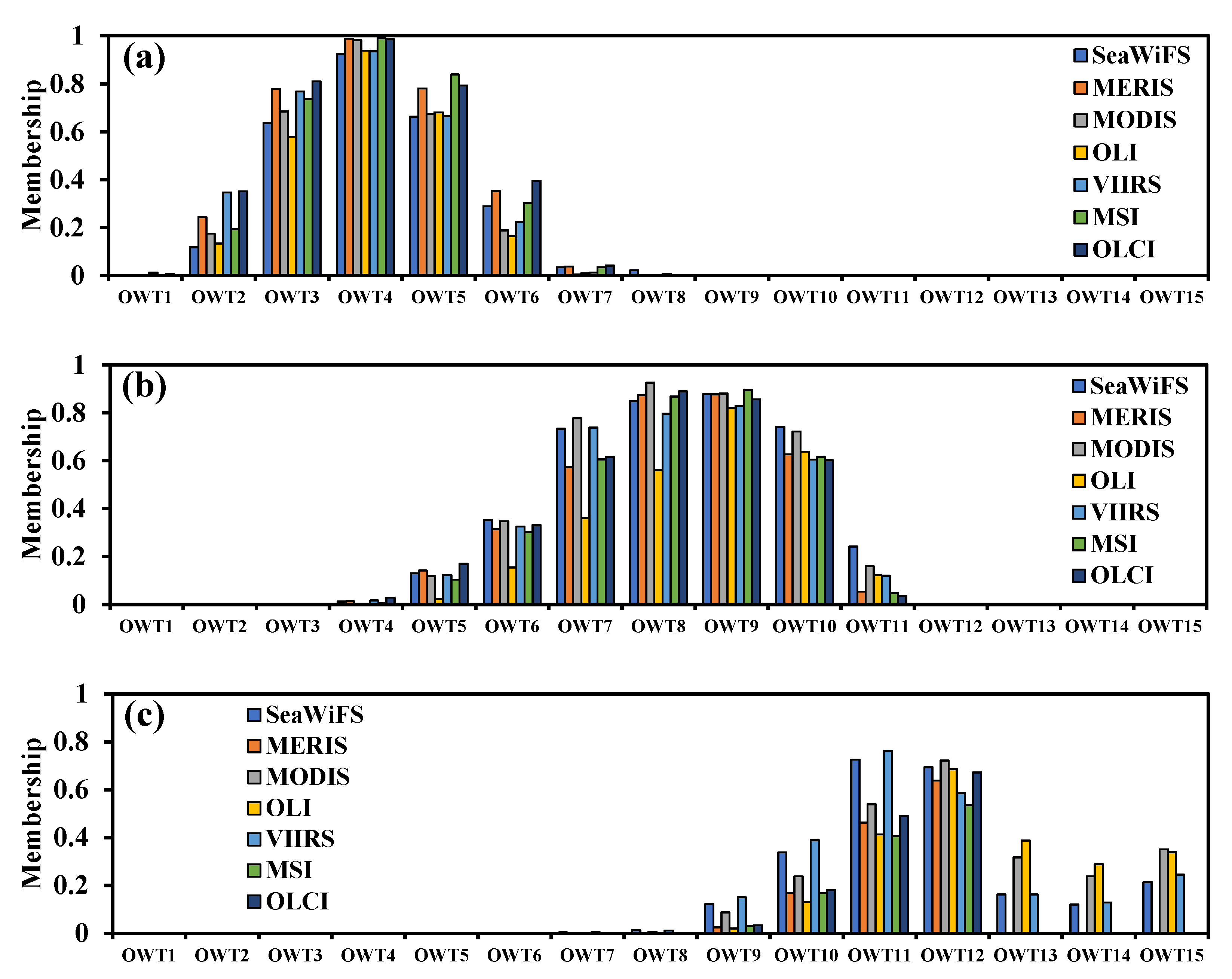
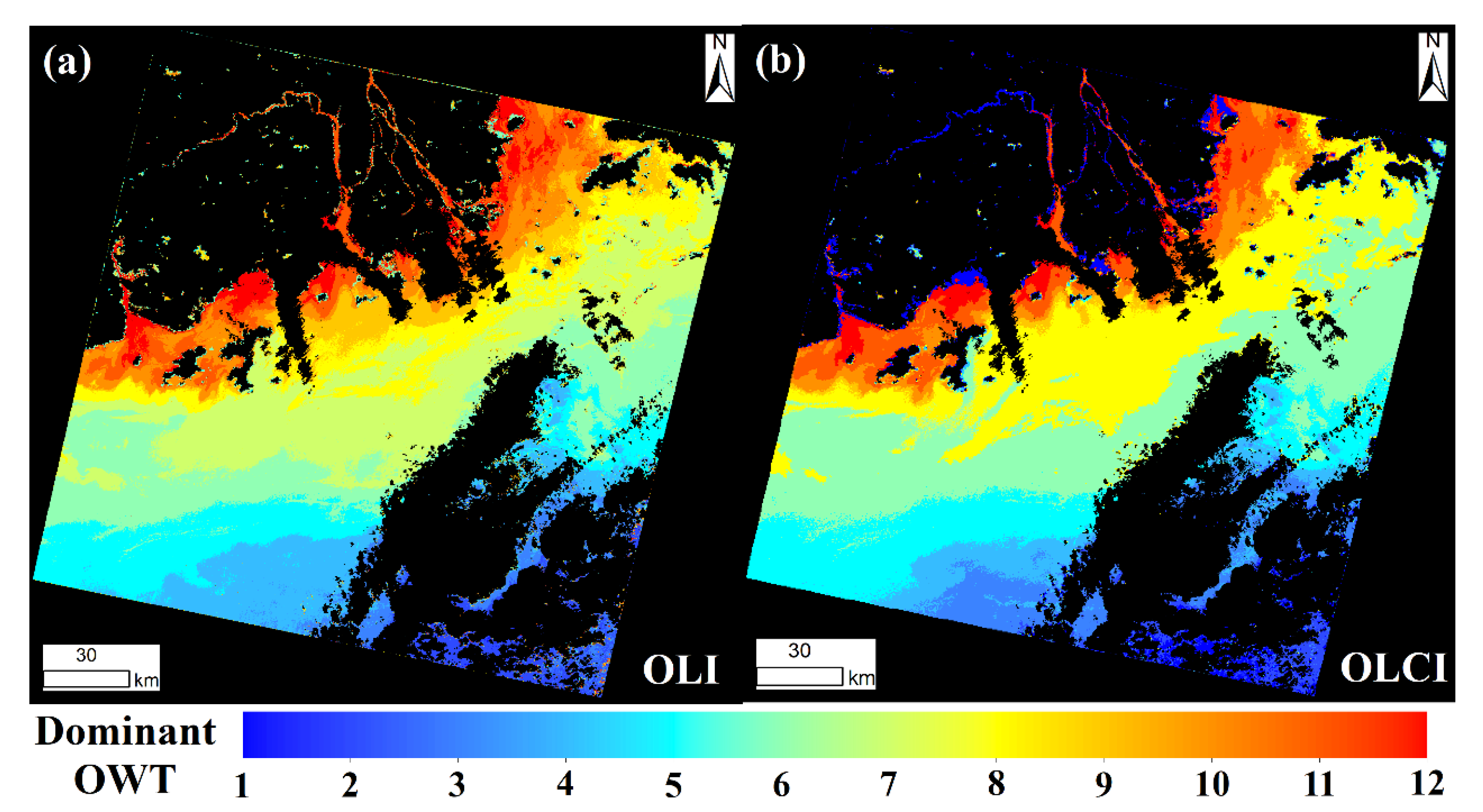
3.2.2. Consistency Analysis between Different Multispectral Sensors
3.2.3. Sensitivity Analysis
3.3. Relationships to Other Water Type Taxonomies
3.3.1. Relationship to the Chla-Based TSI
3.3.2. Relationship to the Absorption Properties
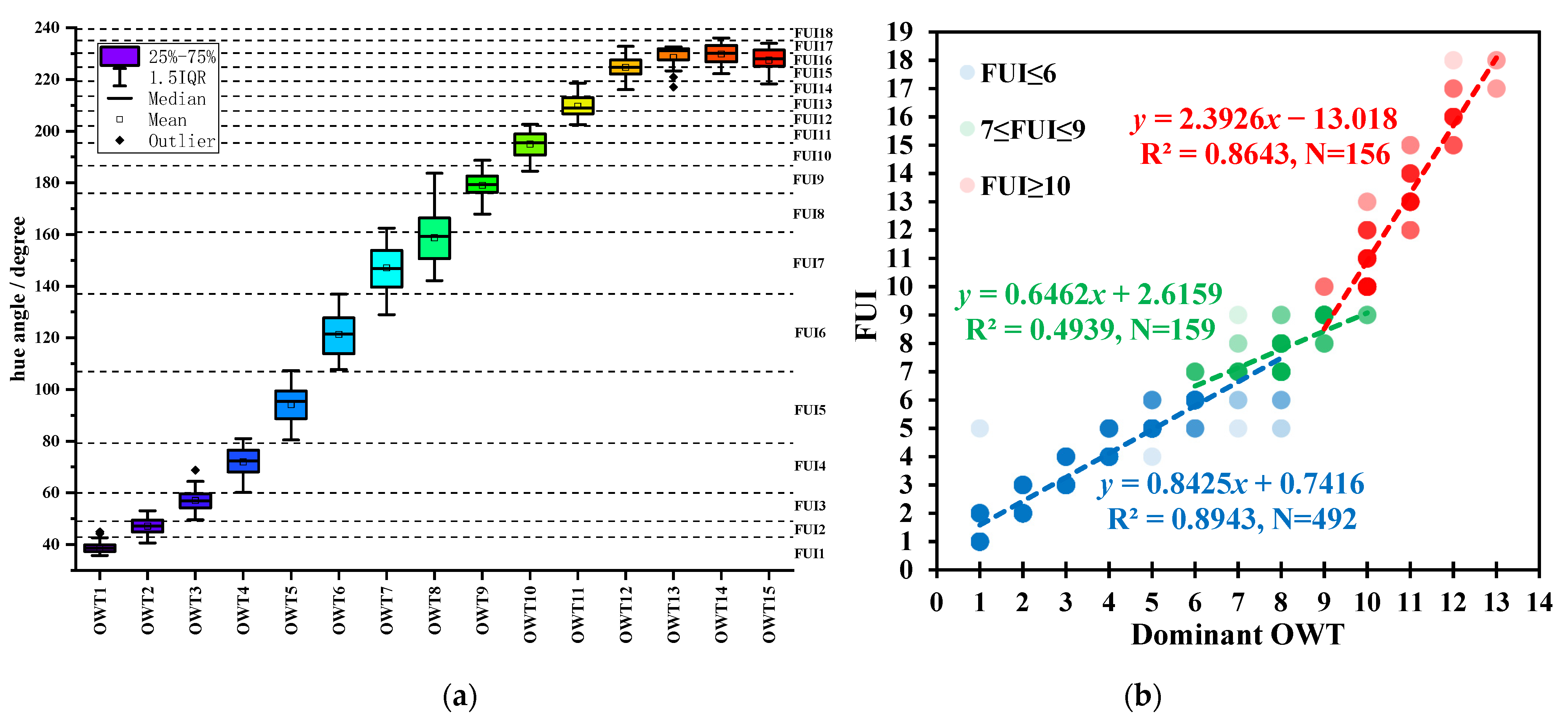
3.3.3. Relationship to the Forel–Ule Scale
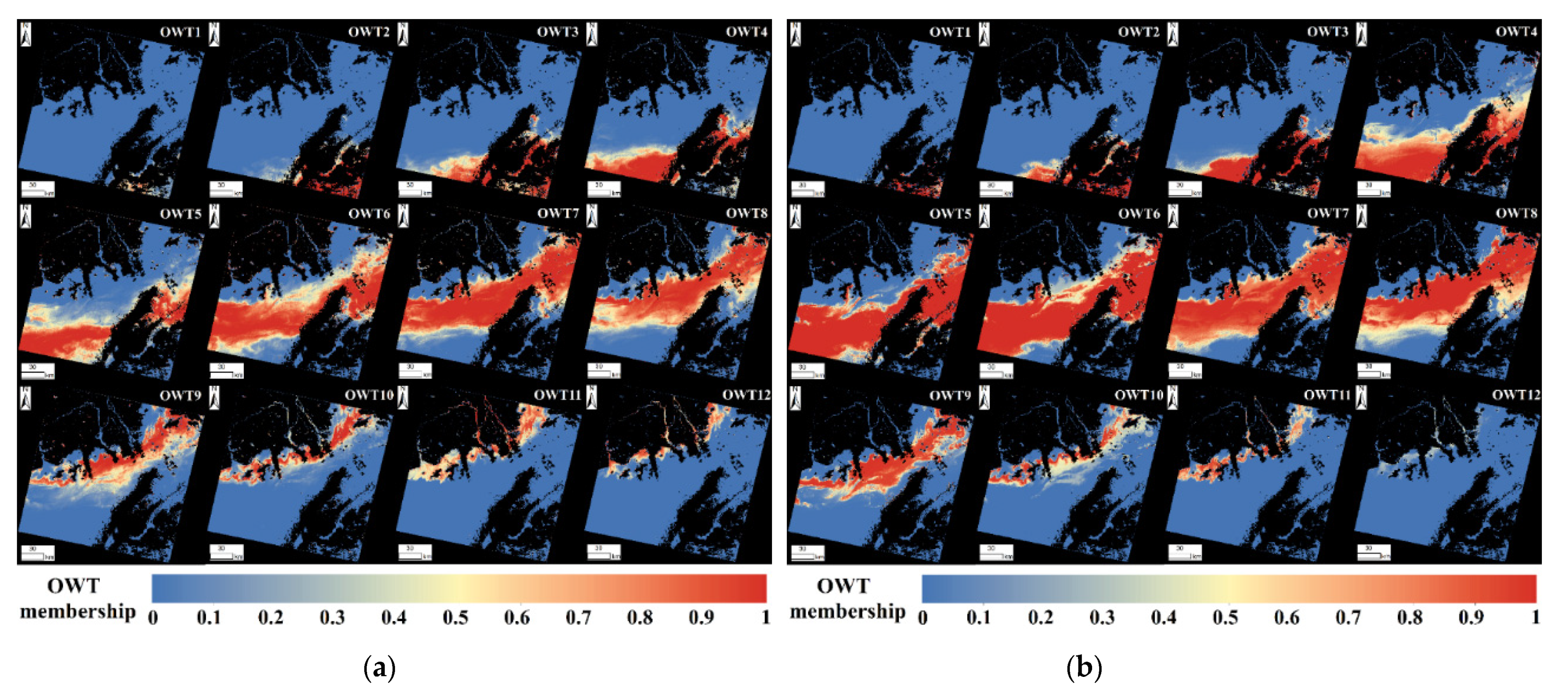
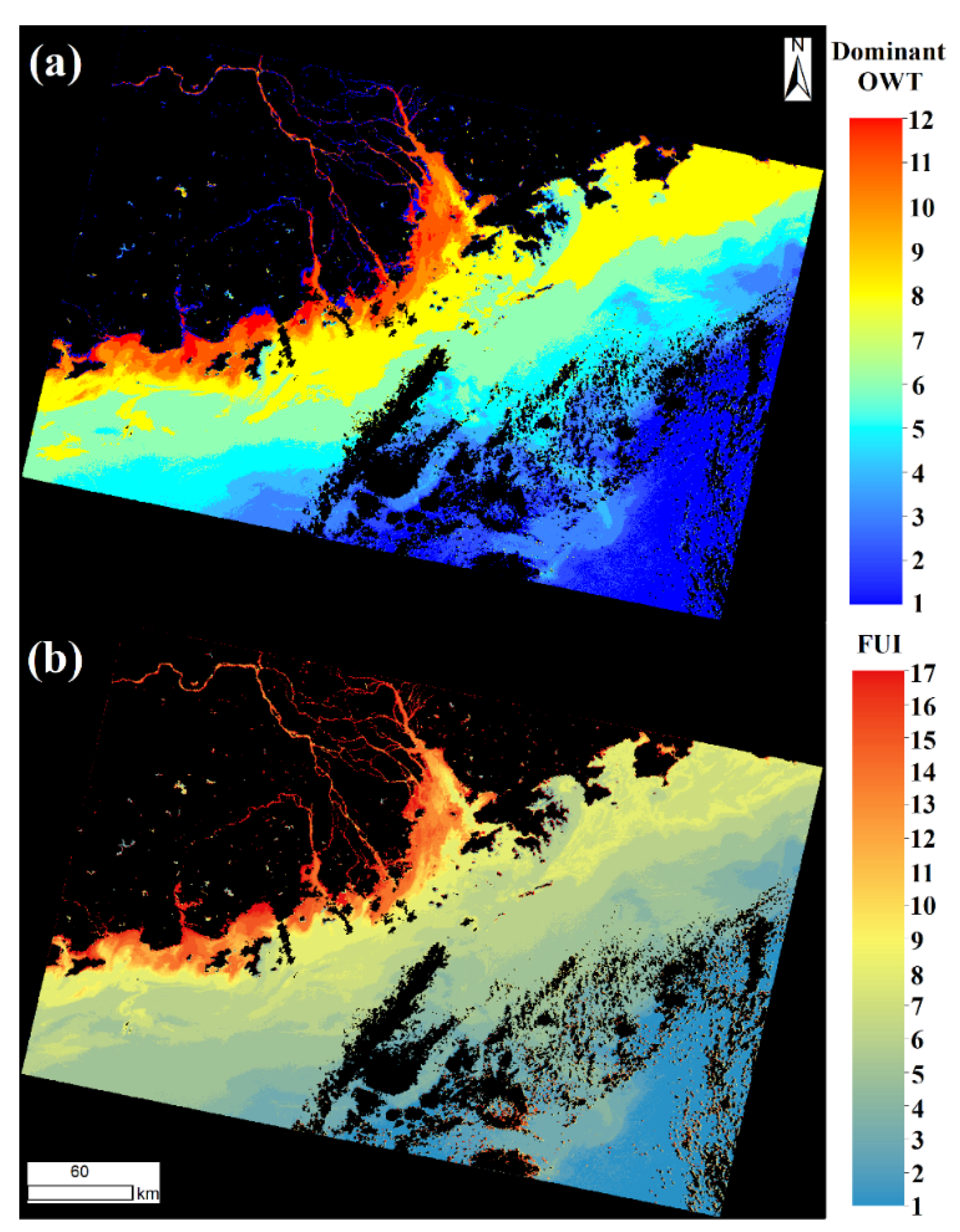
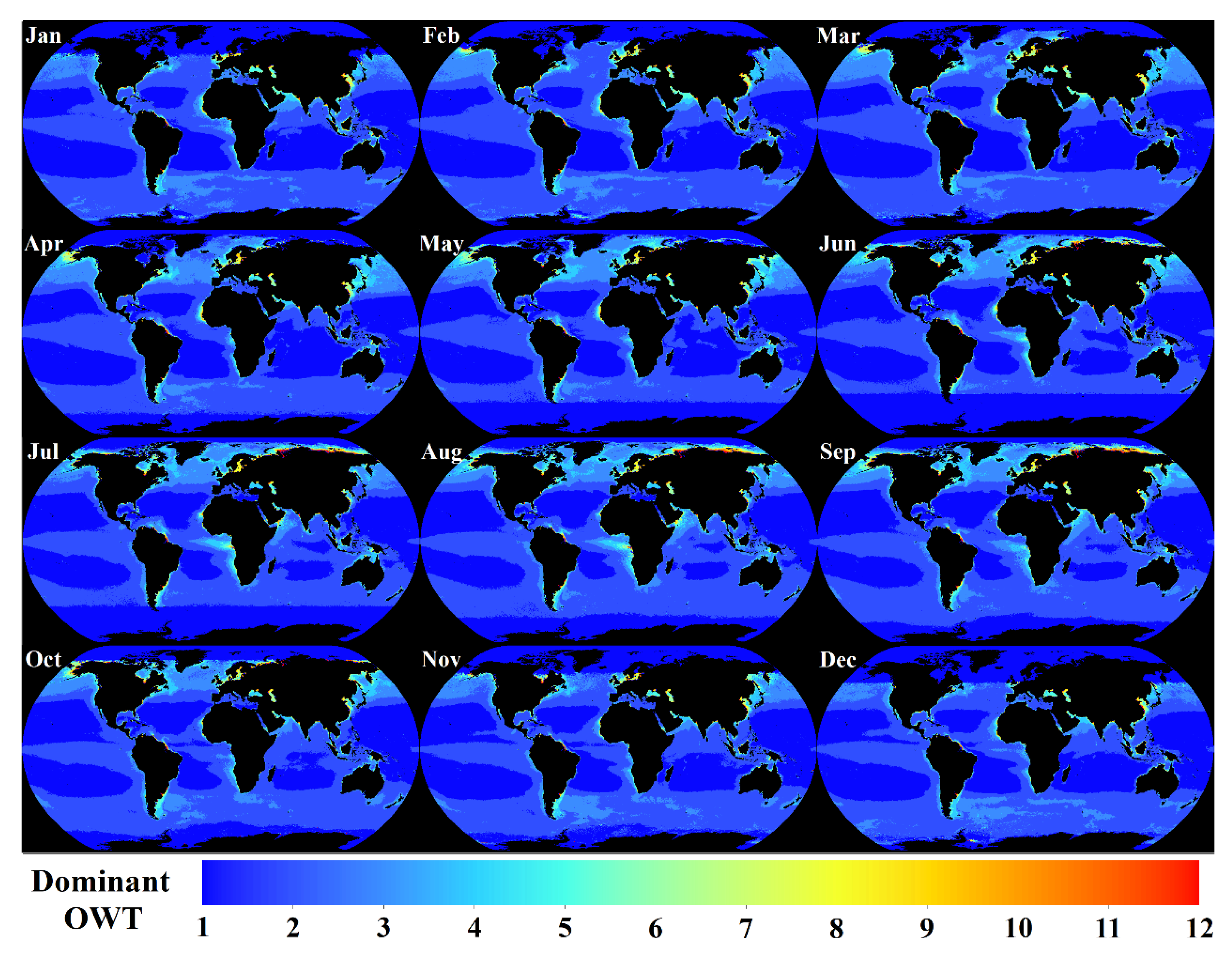
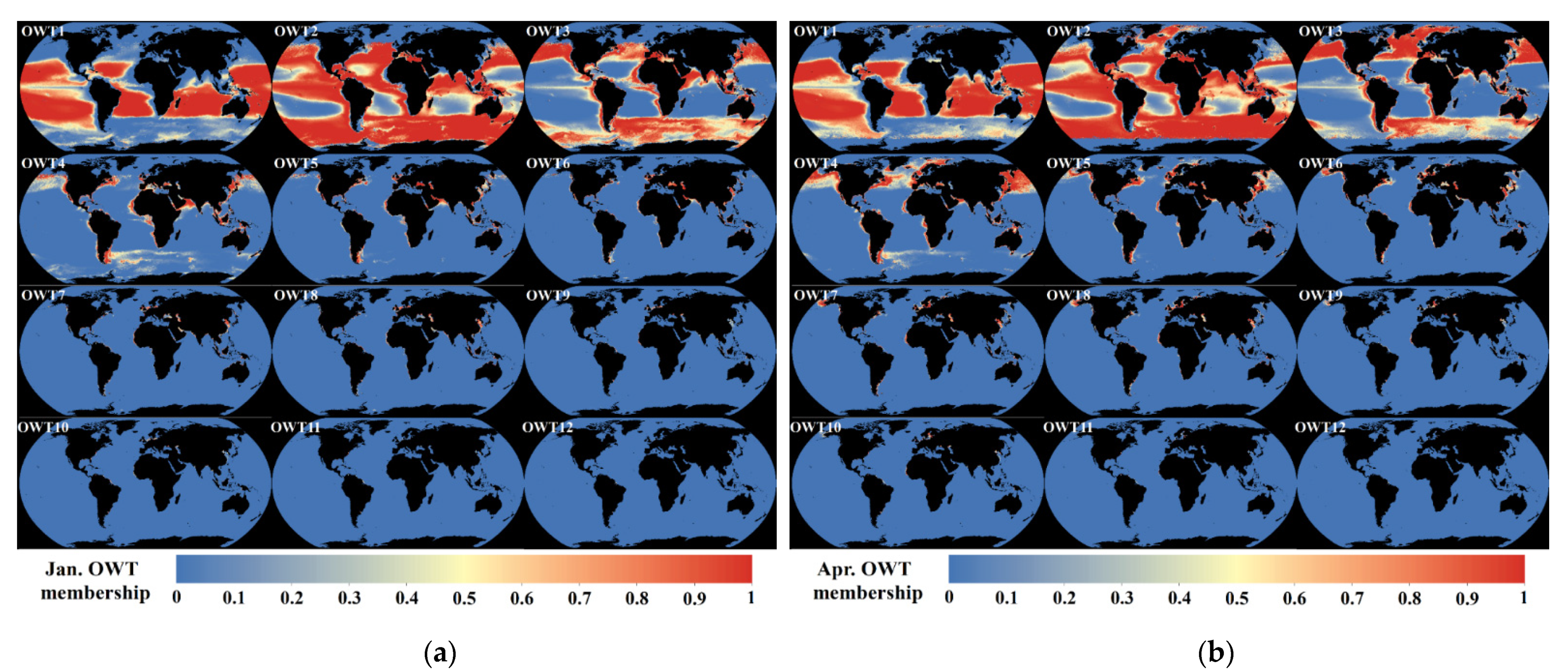
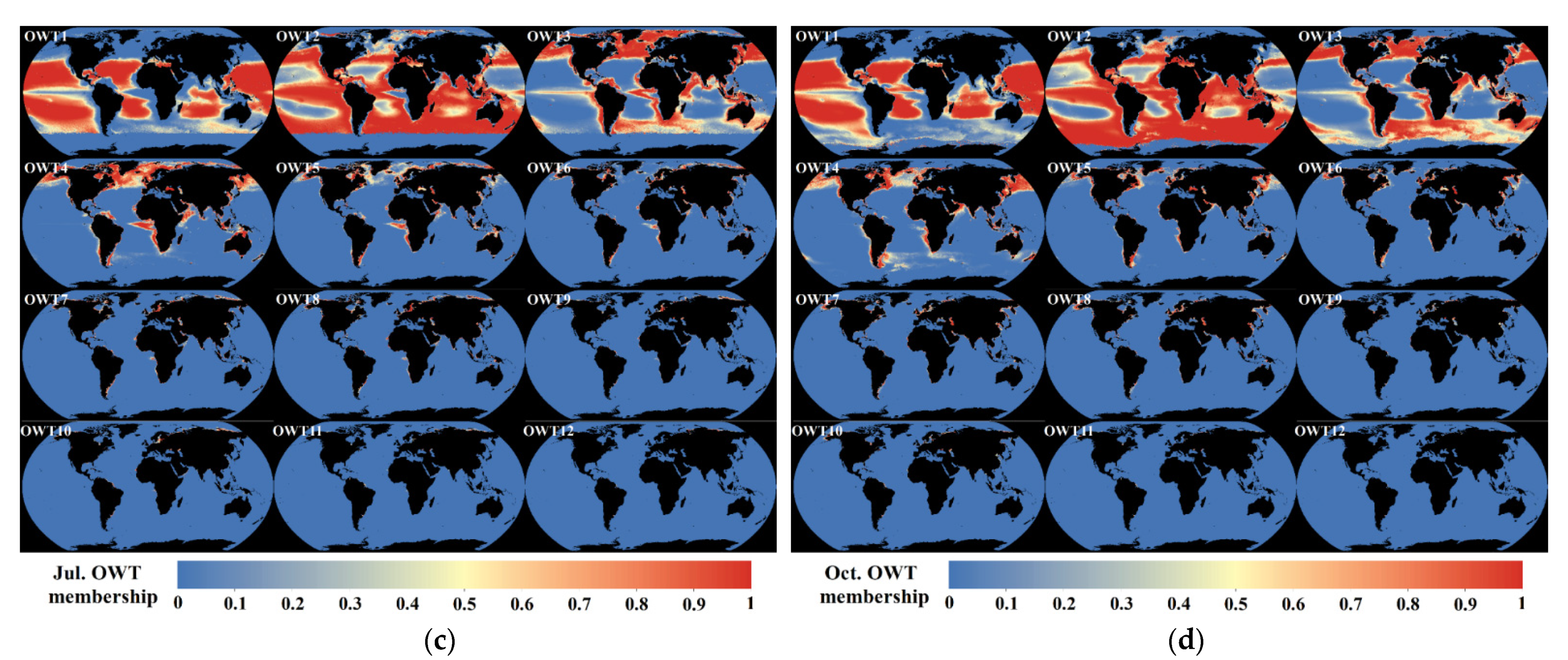
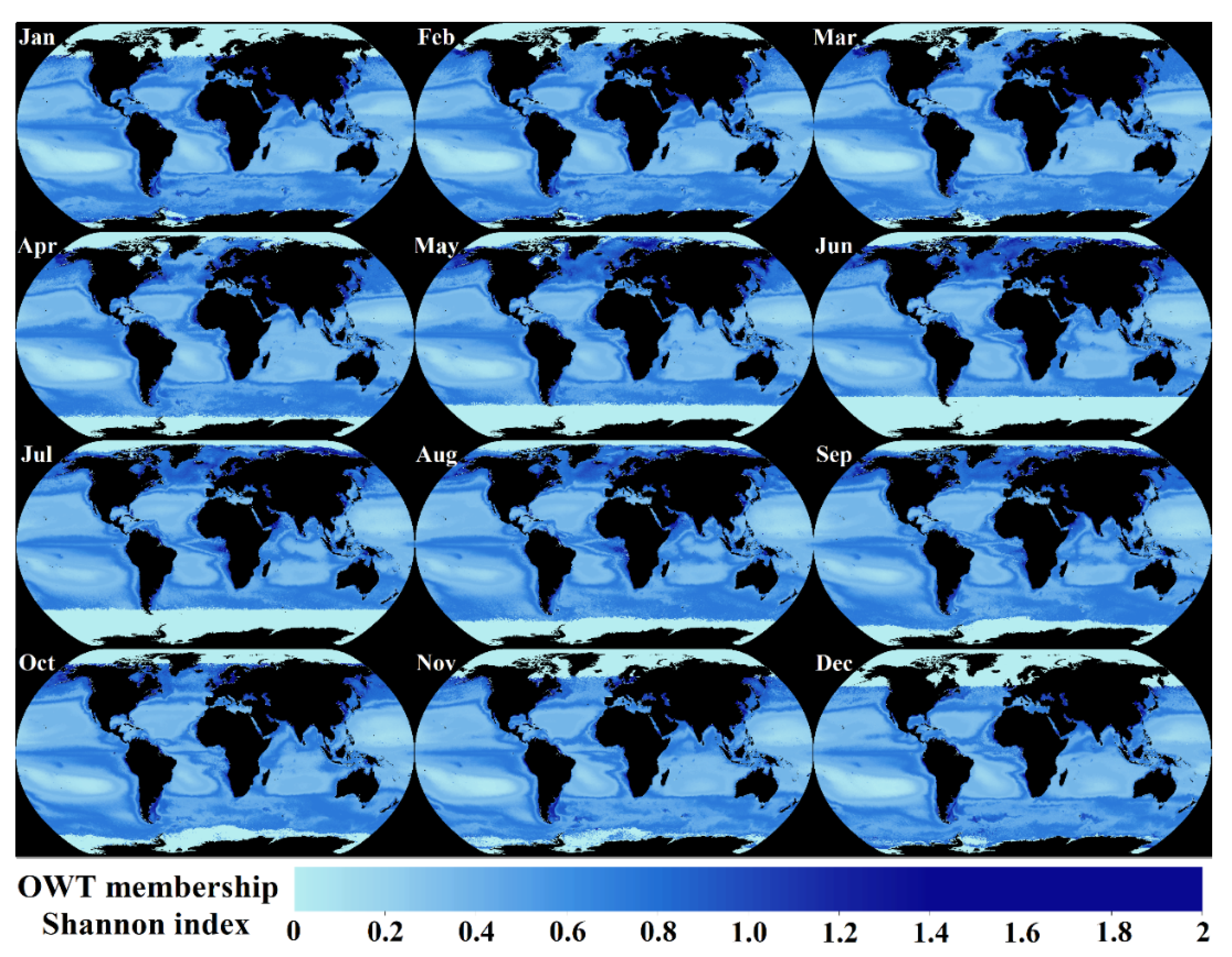
3.4. Global Applications of the U-OWT
4. Discussion
4.1. How Many Optical Water Types in the World?
4.2. Unification of Different Water Type Taxonomies
4.3. Future Prospects of the U-OWT
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ith Band | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| λi(nm) | 400 | 413 | 443 | 490 | 510 | 560 | 620 | 665 | 673.5 | 681.25 | 708.75 |
| xi | 0.154 | 2.957 | 10.861 | 3.744 | 3.750 | 34.687 | 41.853 | 7.323 | 0.591 | 0.549 | 0.189 |
| yi | 0.004 | 0.112 | 1.711 | 5.672 | 23.263 | 48.791 | 23.949 | 2.836 | 0.216 | 0.199 | 0.068 |
| zi | 0.731 | 14.354 | 58.356 | 28.227 | 4.022 | 0.618 | 0.026 | 0.000 | 0.000 | 0.000 | 0.000 |
| FUI | a | FUI | a | FUI | a |
|---|---|---|---|---|---|
| 1 | 40.467 | 8 | 170.463 | 15 | 222.115 |
| 2 | 45.196 | 9 | 181.498 | 16 | 227.629 |
| 3 | 52.852 | 10 | 191.835 | 17 | 232.830 |
| 4 | 67.169 | 11 | 199.038 | 18 | 237.352 |
| 5 | 91.298 | 12 | 205.062 | 19 | 241.759 |
| 6 | 122.585 | 13 | 210.577 | 20 | 245.551 |
| 7 | 151.479 | 14 | 216.557 | 21 | 248.953 |
References
- Werdell, P.J.; Behrenfeld, M.J.; Bontempi, P.S.; Boss, E.; Cairns, B.; Davis, G.T.; Franz, B.A.; Gliese, U.B.; Gorman, E.T.; Hasekamp, O.; et al. The Plankton, Aerosol, Cloud, Ocean Ecosystem Mission: Status, Science, Advances. Bull. Am. Meteorol. Soc. 2019, 100, 1775–1794. [Google Scholar] [CrossRef]
- IOCC. Why Ocean Colour? The Societal Benefits of Ocean-Colour Technology; Reports of the International Ocean-Colour Coordinating Group, No. 7; Platt, T., Hoepffner, N., Stuart, V., Brown, C., Eds.; IOCCG: Dartmouth, NS, Canada, 2008. [Google Scholar]
- Mobley, C.; Boss, E.; Roesler, C. Ocean Optics Web Book. Available online: https://www.oceanopticsbook.info/ (accessed on 11 August 2021).
- Uudeberg, K.; Aavaste, A.; Koks, K.L.; Ansper, A.; Uusoue, M.; Kangro, K.; Ansko, I.; Ligi, M.; Toming, K.; Reinart, A. Optical water type guided approach to estimate optical water quality parameters. Remote Sens. 2020, 12, 391. [Google Scholar] [CrossRef] [Green Version]
- Mobley, C.D.; Stramski, D.; Bissett, W.P.; Boss, E. Optical Modeling of Ocean Waters: Is the Case 1–Case 2 Classification Still Useful? Oceanography 2004, 17, 60–67. [Google Scholar] [CrossRef]
- Jerlov, N.G. Optical Oceanography; Elsevier Oceanography Series 5; Elsevier: Amsterdam, The Netherlands, 1968. [Google Scholar]
- Jerlov, N.G. Marine Optics; Elsevier Oceanography Series 14; Elsevier: Amsterdam, The Netherlands, 1976. [Google Scholar]
- Moore, T.S.; Campbell, J.W.; Feng, H. A fuzzy logic classification scheme for selecting and blending satellite ocean color algorithms. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1764–1776. [Google Scholar] [CrossRef]
- Martin Traykovski, L.V. Feature-based classification of optical water types in the Northwest Atlantic based on satellite ocean color data. J. Geophys. Res. 2003, 108. [Google Scholar] [CrossRef] [Green Version]
- Moore, T.S.; Campbell, J.W.; Dowell, M.D. A class-based approach to characterizing and mapping the uncertainty of the MODIS ocean chlorophyll product. Remote Sens. Environ. 2009, 113, 2424–2430. [Google Scholar] [CrossRef]
- Vantrepotte, V.; Loisel, H.; Dessailly, D.; Mériaux, X. Optical classification of contrasted coastal waters. Remote Sens. Environ. 2012, 123, 306–323. [Google Scholar] [CrossRef]
- Shi, K.; Li, Y.; Li, L.; Lu, H.; Song, K.; Liu, Z.; Xu, Y.; Li, Z. Remote chlorophyll-a estimates for inland waters based on a cluster-based classification. Sci. Total Environ. 2013, 444, 1–15. [Google Scholar] [CrossRef]
- Moore, T.S.; Dowell, M.D.; Bradt, S.; Verdu, A.R. An optical water type framework for selecting and blending retrievals from bio-optical algorithms in lakes and coastal waters. Remote Sens. Environ. 2014, 143, 97–111. [Google Scholar] [CrossRef] [Green Version]
- Mélin, F.; Vantrepotte, V. How optically diverse is the coastal ocean? Remote Sens. Environ. 2015, 160, 235–251. [Google Scholar] [CrossRef]
- Wei, J.; Lee, Z.; Shang, S. A system to measure the data quality of spectral remote sensing reflectance of aquatic environments. J. Geophys. Res. Ocean. 2016. [Google Scholar] [CrossRef]
- Ye, H.; Li, J.; Li, T.; Shen, Q.; Zhu, J.; Wang, X.; Zhang, F.; Zhang, J.; Zhang, B. Spectral Classification of the Yellow Sea and Implications for Coastal Ocean Color Remote Sensing. Remote Sens. 2016, 8, 321. [Google Scholar] [CrossRef] [Green Version]
- Eleveld, M.; Ruescas, A.; Hommersom, A.; Moore, T.; Peters, S.; Brockmann, C. An Optical Classification Tool for Global Lake Waters. Remote Sens. 2017, 9, 420. [Google Scholar] [CrossRef] [Green Version]
- Hieronymi, M.; Müller, D.; Doerffer, R. The OLCI Neural Network Swarm (ONNS): A Bio-Geo-Optical Algorithm for Open Ocean and Coastal Waters. Front. Mar. Sci. 2017, 4. [Google Scholar] [CrossRef] [Green Version]
- Jackson, T.; Sathyendranath, S.; Mélin, F. An improved optical classification scheme for the Ocean Colour Essential Climate Variable and its applications. Remote Sens. Environ. 2017, 203, 152–161. [Google Scholar] [CrossRef]
- Monolisha, S.; Platt, T.; Sathyendranath, S.; Jayasankar, J.; George, G.; Jackson, T. Optical Classification of the Coastal Waters of the Northern Indian Ocean. Front. Mar. Sci. 2018, 5. [Google Scholar] [CrossRef] [Green Version]
- Spyrakos, E.; O’Donnell, R.; Hunter, P.D.; Miller, C.; Scott, M.; Simis, S.G.H.; Neil, C.; Barbosa, C.C.F.; Binding, C.E.; Bradt, S.; et al. Optical types of inland and coastal waters. Limnol. Oceanogr. 2018, 63, 846–870. [Google Scholar] [CrossRef] [Green Version]
- Hieronymi, M. Spectral band adaptation of ocean color sensors for applicability of the multi-water biogeo-optical algorithm ONNS. Opt. Express 2019, 27, A707–A724. [Google Scholar] [CrossRef]
- Pitarch, J.; van der Woerd, H.J.; Brewin, R.J.W.; Zielinski, O. Optical properties of Forel-Ule water types deduced from 15 years of global satellite ocean color observations. Remote Sens. Environ. 2019, 231, 111249. [Google Scholar] [CrossRef]
- Soomets; Uudeberg; Jakovels; Zagars; Reinart; Brauns; Kutser. Comparison of Lake Optical Water Types Derived from Sentinel-2 and Sentinel-3. Remote Sens. 2019, 11, 2883. [Google Scholar] [CrossRef] [Green Version]
- Uudeberg, K.; Ansko, I.; Põru, G.; Ansper, A.; Reinart, A. Using Optical Water Types to Monitor Changes in Optically Complex Inland and Coastal Waters. Remote Sens. 2019, 11, 2297. [Google Scholar] [CrossRef] [Green Version]
- Xue, K.; Ma, R.; Wang, D.; Shen, M. Optical Classification of the Remote Sensing Reflectance and Its Application in Deriving the Specific Phytoplankton Absorption in Optically Complex Lakes. Remote Sens. 2019, 11, 184. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Li, J.; Shen, Q.; Zhang, B.; Tian, L.; Ye, H.; Wang, S.; Lu, Z. A soft-classification-based chlorophyll-a estimation method using MERIS data in the highly turbid and eutrophic Taihu Lake. Int. J. Appl. Earth Obs. Geoinf. 2019, 74, 138–149. [Google Scholar] [CrossRef]
- Balasubramanian, S.V.; Pahlevan, N.; Smith, B.; Binding, C.; Schalles, J.; Loisel, H.; Gurlin, D.; Greb, S.; Alikas, K.; Randla, M.; et al. Robust algorithm for estimating total suspended solids (TSS) in inland and nearshore coastal waters. Remote Sens. Environ. 2020, 246, 111768. [Google Scholar] [CrossRef]
- da Silva, E.F.F.; Novo, E.M.L.d.M.; Lobo, F.d.L.; Barbosa, C.C.F.; Noernberg, M.A.; Rotta, L.H.d.S.; Cairo, C.T.; Maciel, D.A.; Flores Júnior, R. Optical water types found in Brazilian waters. Limnology 2020, 1–12. [Google Scholar] [CrossRef]
- Vandermeulen, R.A.; Mannino, A.; Craig, S.E.; Werdell, P.J. 150 shades of green: Using the full spectrum of remote sensing reflectance to elucidate color shifts in the ocean. Remote Sens. Environ. 2020, 247, 111900. [Google Scholar] [CrossRef]
- IOCCG. Remote Sensing of Inherent Optical Properties: Fundamentals, Tests of Algorithms, and Applications; Reports of the International Ocean-Colour Coordinating Group, No. 5; Lee, Z.P., Ed.; IOCCG: Dartmouth, NS, Canada, 2006. [Google Scholar]
- Arnone, R.; Wood, M.; Gould, R. The Evolution of Optical Water Mass Classification. Oceanography 2004, 17, 14–15. [Google Scholar] [CrossRef]
- Claustre, H.; Maritorena, S. The Many Shades of Ocean Blue. Science 2003, 302, 1514–1515. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carlson, R.E. A tophic state index for lakes. Limnol. Oceanogr. 1977, 22, 361–369. [Google Scholar] [CrossRef] [Green Version]
- Novoa, S.; Wernand, M.R.; Woerd, H.J.v.d. The Forel-Ule scale revisited spectrally_preparation, protocol, transmission messurements and chromaticity. J. Eur. Opt. Soc. Rapic Publ. 2013, 8, 1–8. [Google Scholar] [CrossRef]
- Woerd, H.J.; Wernand, M.R. True colour classification of natural waters with medium-spectral resolution satellites: SeaWiFS, MODIS, MERIS and OLCI. Sensors 2015, 15, 25663–25680. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, S.; Li, J.; Zhang, B.; Spyrakos, E.; Tyler, A.N.; Shen, Q.; Zhang, F.; Kuster, T.; Lehmann, M.K.; Wu, Y.; et al. Trophic state assessment of global inland waters using a MODIS-derived Forel-Ule index. Remote Sens. Environ. 2018, 217, 444–460. [Google Scholar] [CrossRef] [Green Version]
- Craig, S.E.; Lee, Z.; Du, K. Top of Atmosphere, Hyperspectral Synthetic Dataset for PACE (Phytoplankton, Aerosol, and ocean Ecosystem) Ocean Color Algorithm Development. Available online: https://doi.org/10.1594/PANGAEA.915747 (accessed on 20 October 2020).
- Wang, S.; Lee, Z.; Shang, S.; Li, J.; Zhang, B.; Lin, G. Deriving inherent optical properties from classical water color measurements: Forel-Ule index and Secchi disk depth. Opt. Express 2019, 27, 7642–7655. [Google Scholar] [CrossRef] [PubMed]
- Werdell, P.J.; Bailey, S.W. An improved in situ data set for bio-optical algorithm development and ocean color satellite validation. Remote Sens. Environ. 2005, 98, 122–140. [Google Scholar] [CrossRef]
- Nechad, B.; Ruddick, K.; Schroeder, T.; Blondeau-Patissier, D.; Cherukuru, N.; Brando, V.E.; Dekker, A.G.; Clementson, L.; Banks, A.; Maritorena, S.; et al. CoastColour Round Robin datasets, Version 1. Available online: https://doi.org/10.1594/PANGAEA.841950 (accessed on 10 February 2021).
- Wang, S.; Lee, Z.; Shang, S.; Li, J.; Zhang, B.; Lin, G. Data File 1.csv. Available online: https://doi.org/10.6084/m9.figshare.7355903.v1 (accessed on 15 February 2021).
- Wang, S.; Lee, Z.; Shang, S.; Li, J.; Zhang, B.; Lin, G. Data File 2.csv. Available online: https://doi.org/10.6084/m9.figshare.7355906.v1 (accessed on 15 February 2021).
- Wang, J.; Tong, Y.; Feng, L.; Zhao, D.; Zheng, C.; Tang, J. Satellite-Observed Decreases in Water Turbidity in the Pearl River Estuary: Potential Linkage With Sea-Level Rise. J. Geophys. Res. Ocean. 2021, 126. [Google Scholar] [CrossRef]
- Sathyendranath, S.; Jackson, T.; Brockmann, C.; Brotas, V.; Calton, B.; Chuprin, A.; Clements, O.; Cipollini, P.; Danne, O.; Dingle, J.; et al. ESA Ocean Colour Climate Change Initiative (Ocean_Colour_cci): Global chlorophyll-a data products gridded on a sinusoidal projection, Version 4.2. Available online: https://catalogue.ceda.ac.uk/uuid/99348189bd33459cbd597a58c30d8d10 (accessed on 22 December 2020).
- Sathyendranath, S.; Brewin, R.J.W.; Brockmann, C.; Brotas, V.; Calton, B.; Chuprin, A.; Cipollini, P.; Couto, A.B.; Dingle, J.; Doerffer, R.; et al. An Ocean-Colour Time Series for Use in Climate Studies: The Experience of the Ocean-Colour Climate Change Initiative (OC-CCI). Sensors 2019, 19, 4285. [Google Scholar] [CrossRef] [Green Version]
- Tibshirani, R.; Walther, G.; Hastie, T. Estimating the number of clusters in a data set via the gap statistic. J. R. Stat. Soc. Ser. B 2001, 63, 411–423. [Google Scholar] [CrossRef]
- Hornik, K.; Feinerer, I.; Kober, M.; Buchta, C. Spherical k-means clustering. J. Stat. Softw. 2012, 50, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Zuhlke, M.; Fomferra, N.; Brockmann, C.; Peters, M.; Veci, L.; Malik, J.; Regner, P. SNAP (Sentinel Application Platform) and the ESA Sentinel 3 Toolbox. Sentinel-3 for Science Workshop 2015, 734, 21. [Google Scholar]
- Solonenko, M.G.; Mobley, C.D. Inherent optical properties of Jerlov water types. Appl. Opt. 2015, 54, 5392–5401. [Google Scholar] [CrossRef] [PubMed]
- Gordon, H.R.; Brown, O.B.; Evans, R.H.; Brown, J.W.; Smith, R.C.; Baker, K.S.; Clark, D.K. A semianalytic radiance model of ocean color. J. Geophys. Res. 1988, 93, 10909. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Arnone, R.A. Deriving inherent optical properties from water color: A multiband quasi-analytical algorithm for optically deep waters. Appl. Opt. 2002, 41, 5755–5772. [Google Scholar] [CrossRef] [PubMed]
- Morio, J. Global and local sensitivity analysis methods for a physical system. Eur. J. Phys. 2011, 32, 1577–1583. [Google Scholar] [CrossRef]
- Prieur, L.; Sathyendranath, S. An optical classification of coastal and oceanic waters based on the specific spectral absorption of phytoplankton pigments, dissolved organic matter, and other particulate materials. Limnol. Oceanogr 1981, 26, 671–689. [Google Scholar] [CrossRef]
- Babin, M. Variations in the light absorption coefficients of phytoplankton, nonalgal particles, and dissolved organic matter in coastal waters around Europe. J. Geophys. Res. 2003, 108. [Google Scholar] [CrossRef]
- Wang, S.; Li, J.; Shen, Q.; Zhang, B.; Zhang, F.; Lu, Z. MODIS-Based Radiometric Color Extraction and Classification of Inland Water With the Forel-Ule Scale: A Case Study of Lake Taihu. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 907–918. [Google Scholar] [CrossRef]
- Wang, S. Large-scale and Long-term Water Quality Remote Sensing Monitoring over Lakes Based on Water Color Index. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, 2018. [Google Scholar]
- Gower, J.F.R.; Doerffer, R.; Borstad, G.A. Interpretation of the 685nm peak in water-leaving radiance spectra in terms of fluorescence, absorption and scattering, and its observation by MERIS. Int. J. Remote Sens. 1999, 20, 1771–1786. [Google Scholar] [CrossRef]
- Fan, Y.; Li, W.; Calzado, V.S.; Trees, C.; Stamnes, S.; Fournier, G.; McKee, D.; Stamnes, K. Inferring inherent optical properties and water constituent profiles from apparent optical properties. Opt. Express 2015, 23, A987–A1009. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- IOCCG. Remote Sensing of Ocean Colour in Coastal, and Other Optical-Complex, Waters; Reports of the International Ocean-Colour Coordinating Group, No. 3; Sathyendranath, S., Ed.; IOCCG: Dartmouth, NS, Canada, 2000. [Google Scholar]
- Longhurst, A.; Sathyendranath, S.; Platt, T.; Caverhill, C. An estimate of global primary production in the ocean from satellite radiometer data. J. Plankton Res. 1995, 17, 1245–1271. [Google Scholar] [CrossRef] [Green Version]
- IOCCG. Partition of the Ocean into Ecological Provinces: Role of Ocean-Colour Radiometry; Reports of the International Ocean-Colour Coordinating Group; No. 9; Dowell, M., Platt, T., Eds.; IOCCG: Dartmouth, NS, Canada, 2009. [Google Scholar]
- Devred, E.; Sathyendranath, S.; Platt, T. Delineation of ecological provinces using ocean colour radiometry. Mar. Ecol. Prog. Ser. 2007, 346, 1–13. [Google Scholar] [CrossRef]




















| Source | Abbreviation | AOP Type | Sampling Area | Band Setting | OWT Class Number |
|---|---|---|---|---|---|
| Jerlov (1968) [6] | JL68 | Irradiance transmittance for surface water/% | Global oceans | 310–700 nm, Δ = 25 nm | 10 |
| Moore et al. (2009) [10] | MO09 | Subsurface remote sensing reflectance/sr−1 | Global oceans | SeaWiFS 6 bands | 8 |
| Moore et al. (2014) [13] | MO14 | Subsurface remote sensing reflectance/sr−1 | Coastal and inland waters | MERIS 10 bands | 7 |
| Wei et al. (2016) [15] | WE16 | Normalized remote sensing reflectance | Global oceans | MODIS 9 bands | 23 |
| Jackson et al. (2017) [19] | JK17 | Remote sensing reflectance/sr−1 | Global oceans | SeaWiFS 6 bands | 14 |
| Pitarch et al. (2019) [23] | PT19 | Remote sensing reflectance/sr−1 | Global oceans | SeaWiFS 6 bands | 21 |
| Coastal [49] | CST | Subsurface remote sensing reflectance/sr−1 | Coastal waters | SeaWiFS 5 bands | 16 |
| GLaSS 5C [49] | G5C | Subsurface remote sensing reflectance/sr−1 | Inland waters | OLCI 13 bands | 5 |
| GLaSS 6C [17,49] | G6C | Subsurface remote sensing reflectance/sr−1 | Inland waters | OLCI 13 bands | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, T.; Zhang, Y.; Dong, R. A Universal Fuzzy Logic Optical Water Type Scheme for the Global Oceans. Remote Sens. 2021, 13, 4018. https://doi.org/10.3390/rs13194018
Jia T, Zhang Y, Dong R. A Universal Fuzzy Logic Optical Water Type Scheme for the Global Oceans. Remote Sensing. 2021; 13(19):4018. https://doi.org/10.3390/rs13194018
Chicago/Turabian StyleJia, Tianxia, Yonglin Zhang, and Rencai Dong. 2021. "A Universal Fuzzy Logic Optical Water Type Scheme for the Global Oceans" Remote Sensing 13, no. 19: 4018. https://doi.org/10.3390/rs13194018