
Assessing a Prototype Database for Comprehensive Global Aquatic Land Cover Mapping


Abstract
:
1. Introduction
2. Materials and Methods
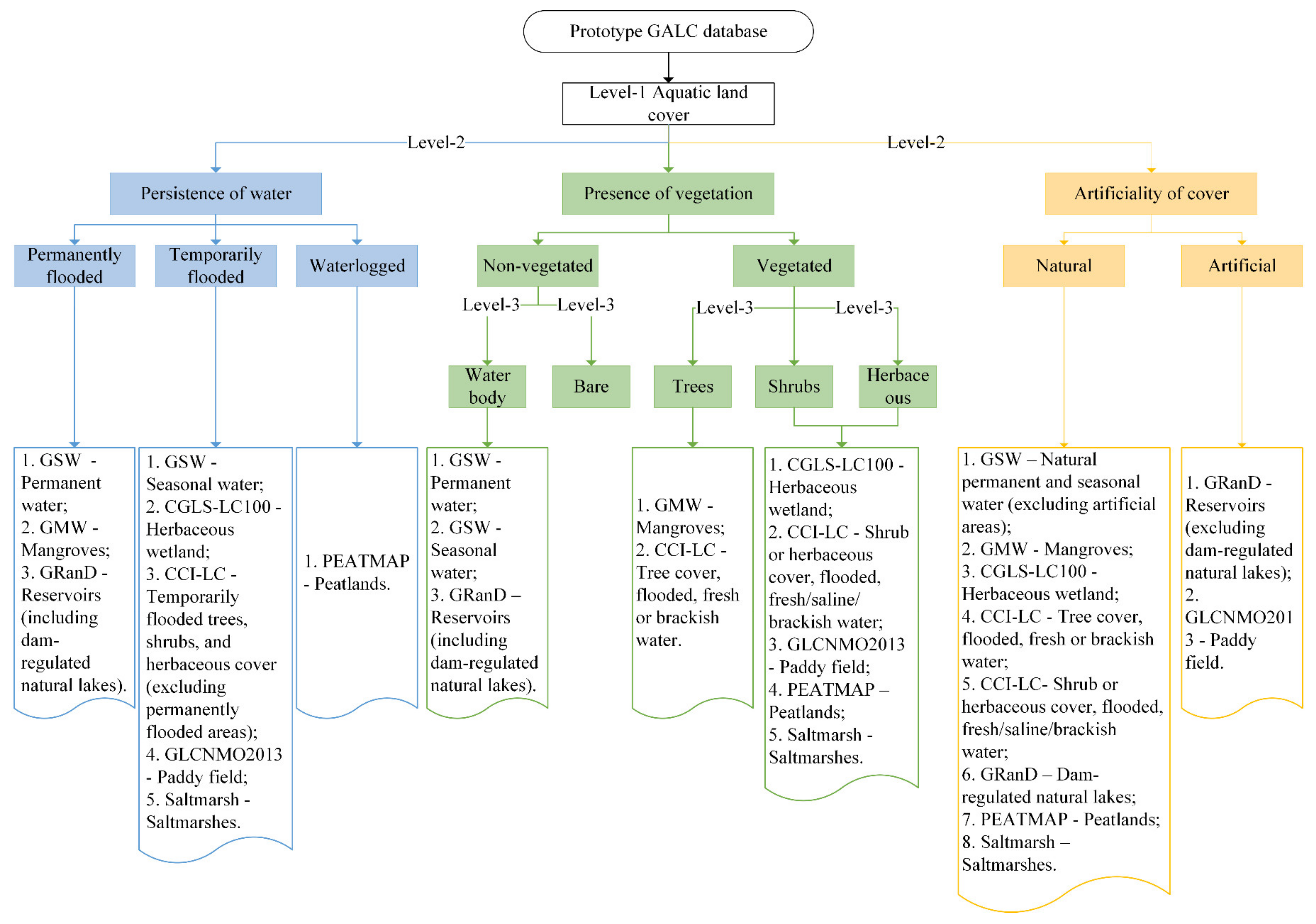
2.1. Global Aquatic Land Cover Characterization Framework
2.1.1. Input Datasets
- Thematic detail: The dataset should include at least one classifier of information at Level-2 or Level-3 of the reference GALC characterization framework.
- Temporal range: To minimize the influence of land changes, the dataset should describe aquatic land cover within 2015 ± 3 years.
- Spatial resolution: Considering the limited availability of high-resolution (≤100 m) datasets, the spatial resolution of the dataset should at least be ≤1 km.
- Accuracy: The dataset should at least have an overall accuracy > 70% or being extensively evaluated (for those without quantitative assessment).
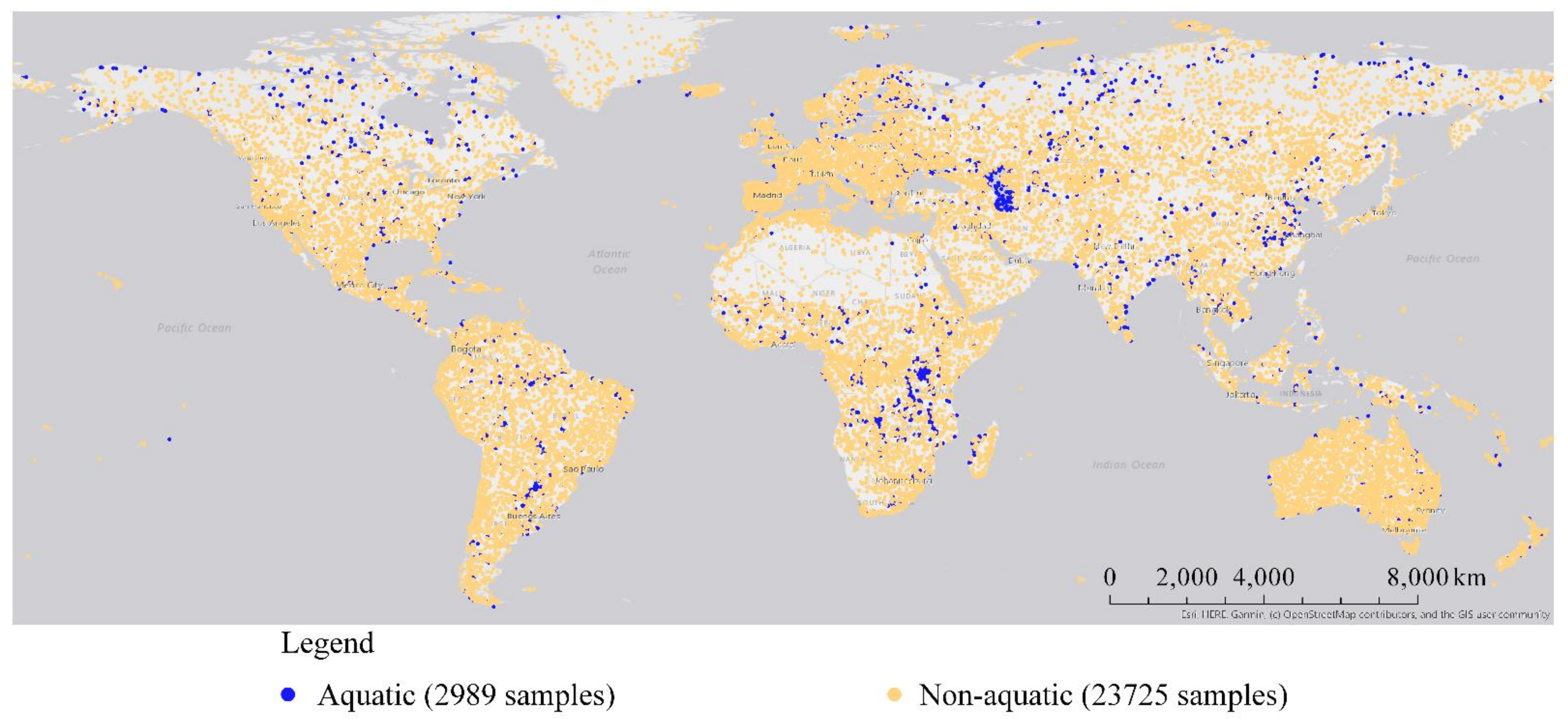
2.1.2. Validation Datasets
2.2. Methods
2.2.1. Dataset Pre-Processing
2.2.2. Legend Harmonization of Input Datasets
- Classes without information on the duration of water (e.g., herbaceous wetland of CGLS-LC100) were assumed as “temporarily flooded”.
- Inconsistent class definition, i.e., the permanent water and seasonal water of the GSW dataset (Table 1), was adjusted to conform with the reference framework.
- For classes including more than one cover type under the same classifier and making no distinction between them, several types were put under the same classifier, e.g., the life form type of PEATMAP included both herbaceous cover and shrubs (Table 3), as marshes and shrub swamps were both mapped by PEATMAP.
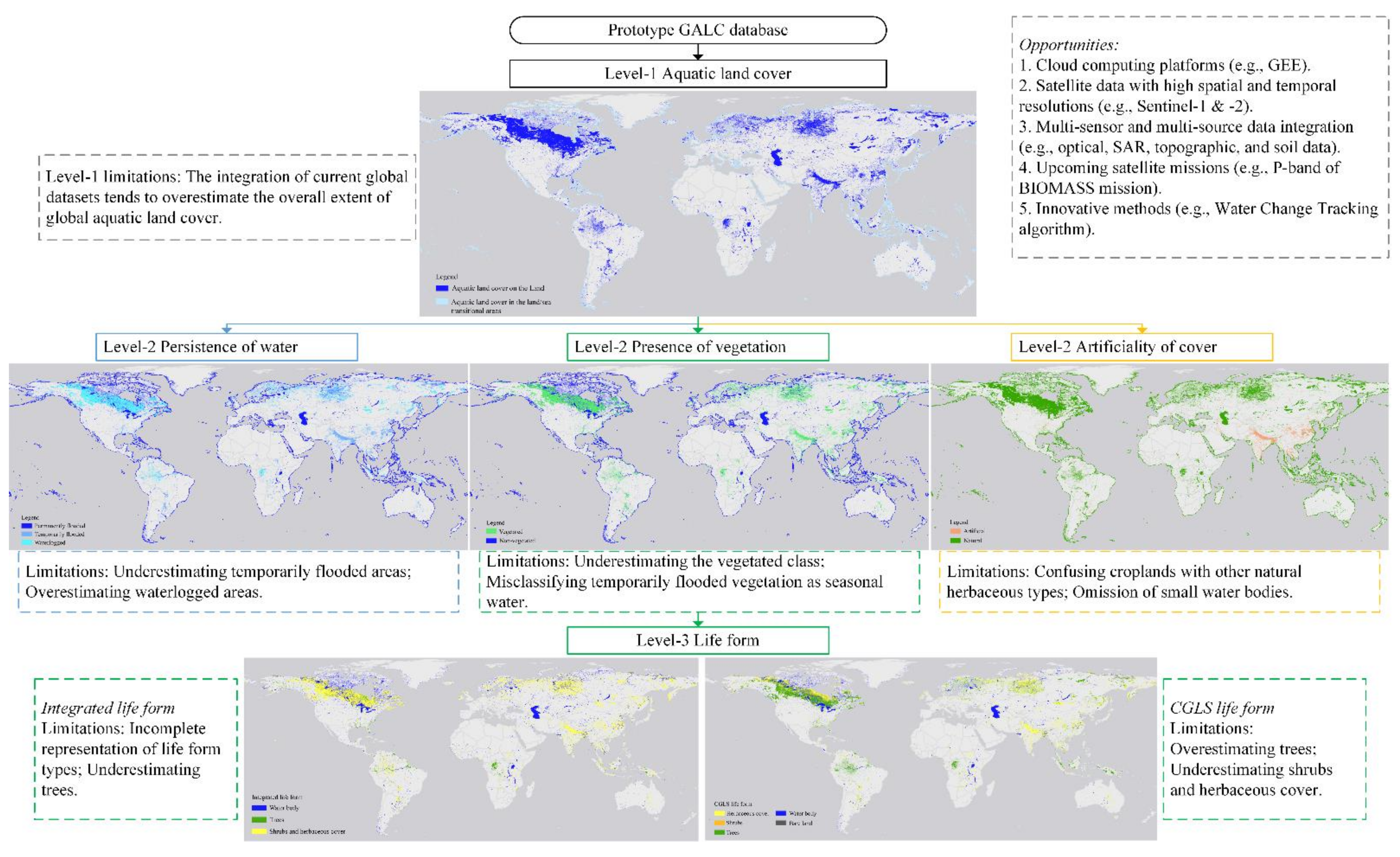
2.2.3. Generation of the Level-1, Level-2, and Level-3 Maps
Level-1: The Aquatic Land Cover Map
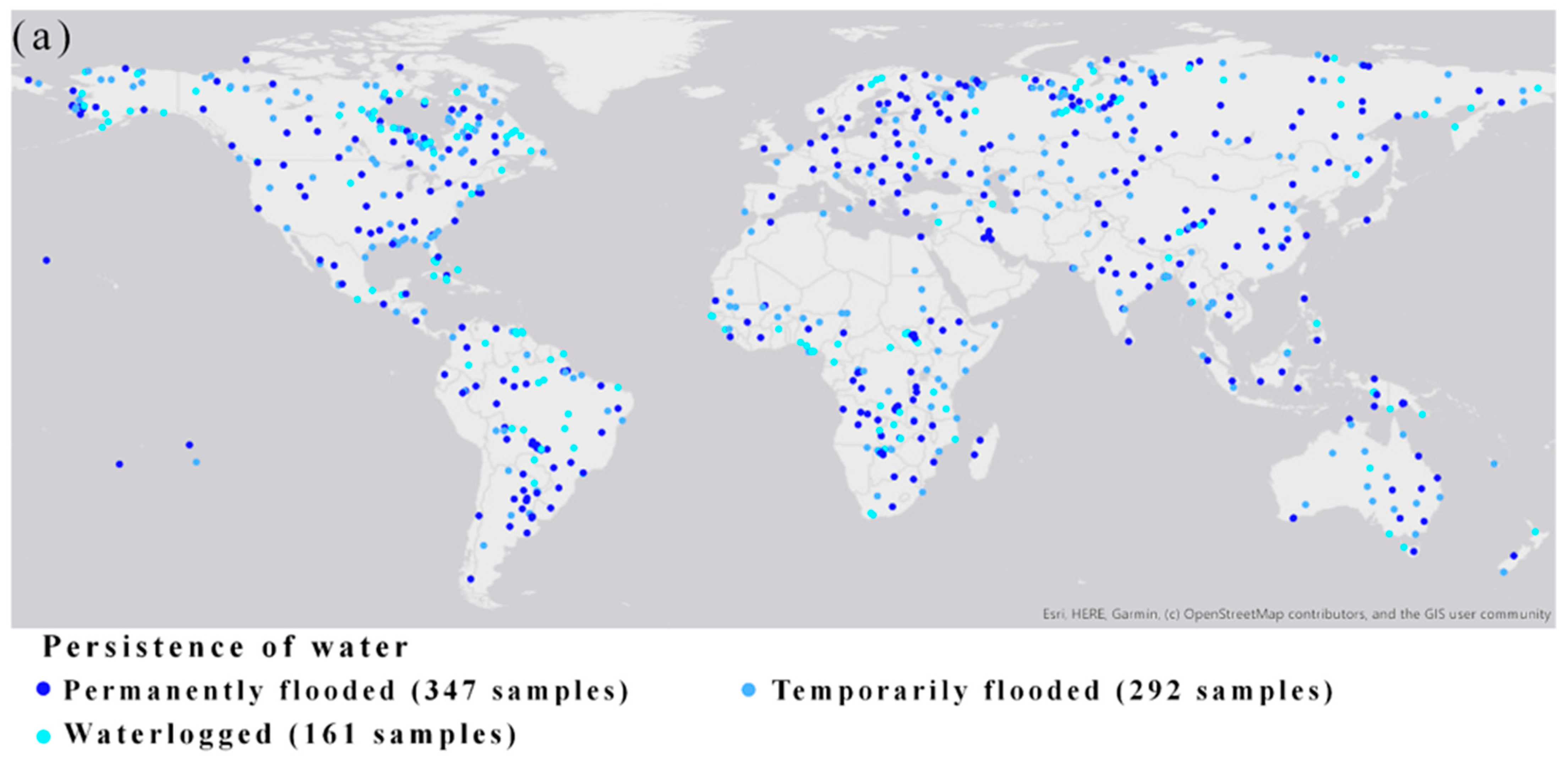
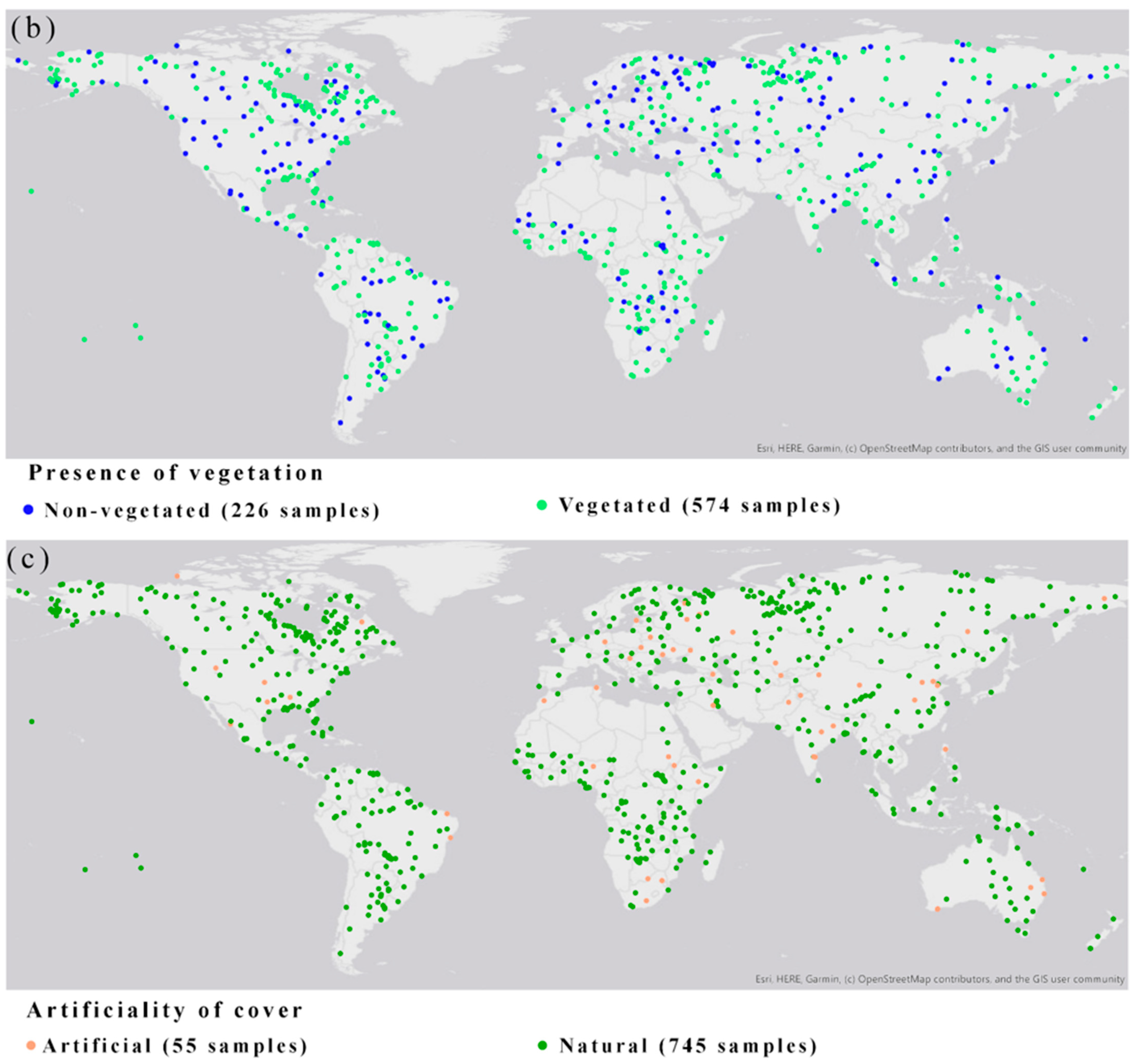
Level-2: The Persistence of Water, Presence of Vegetation, and Artificiality of Cover Map
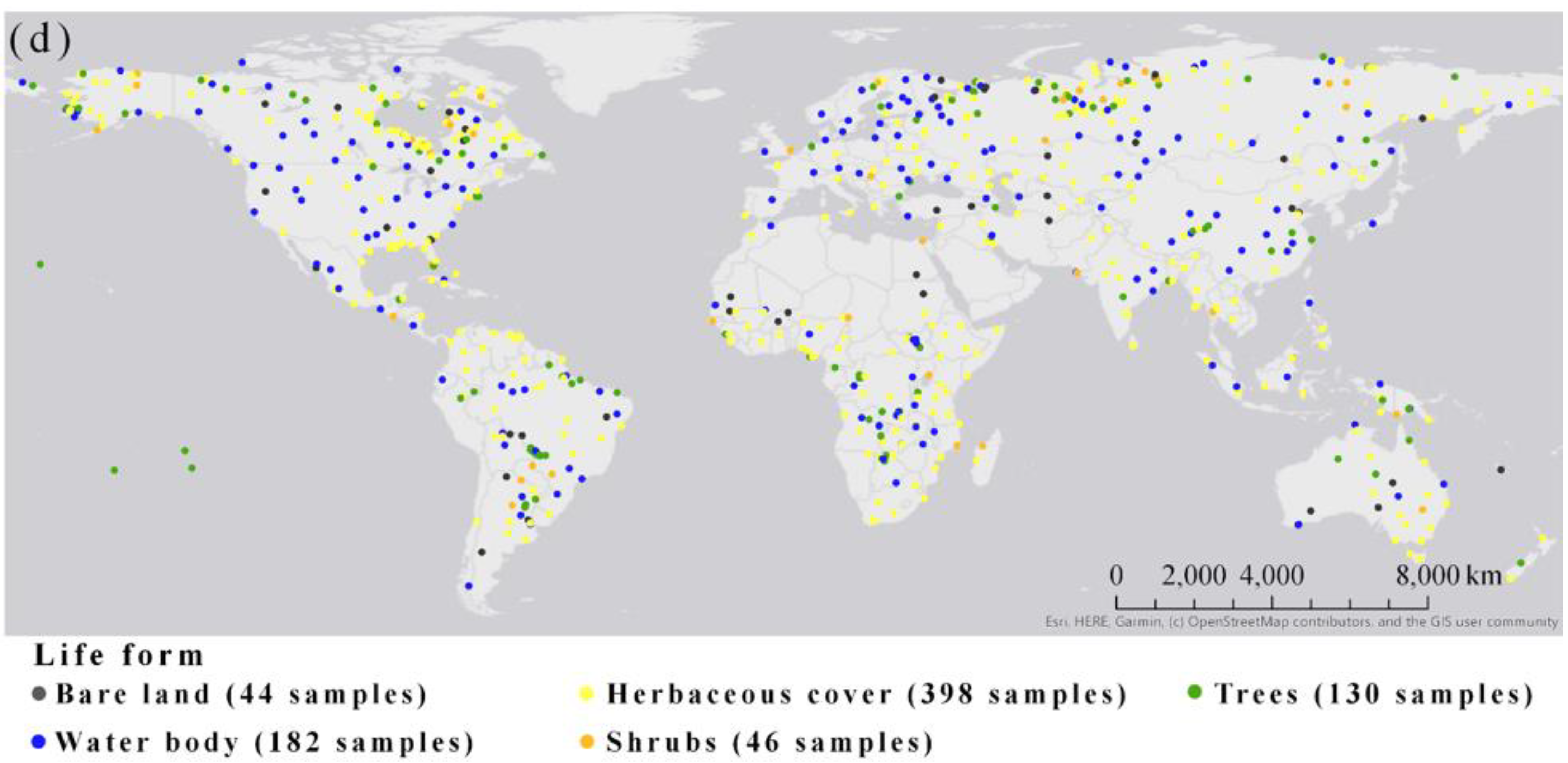
Level-3: The Life Form Map
2.2.4. Accuracy Assessment
3. Results
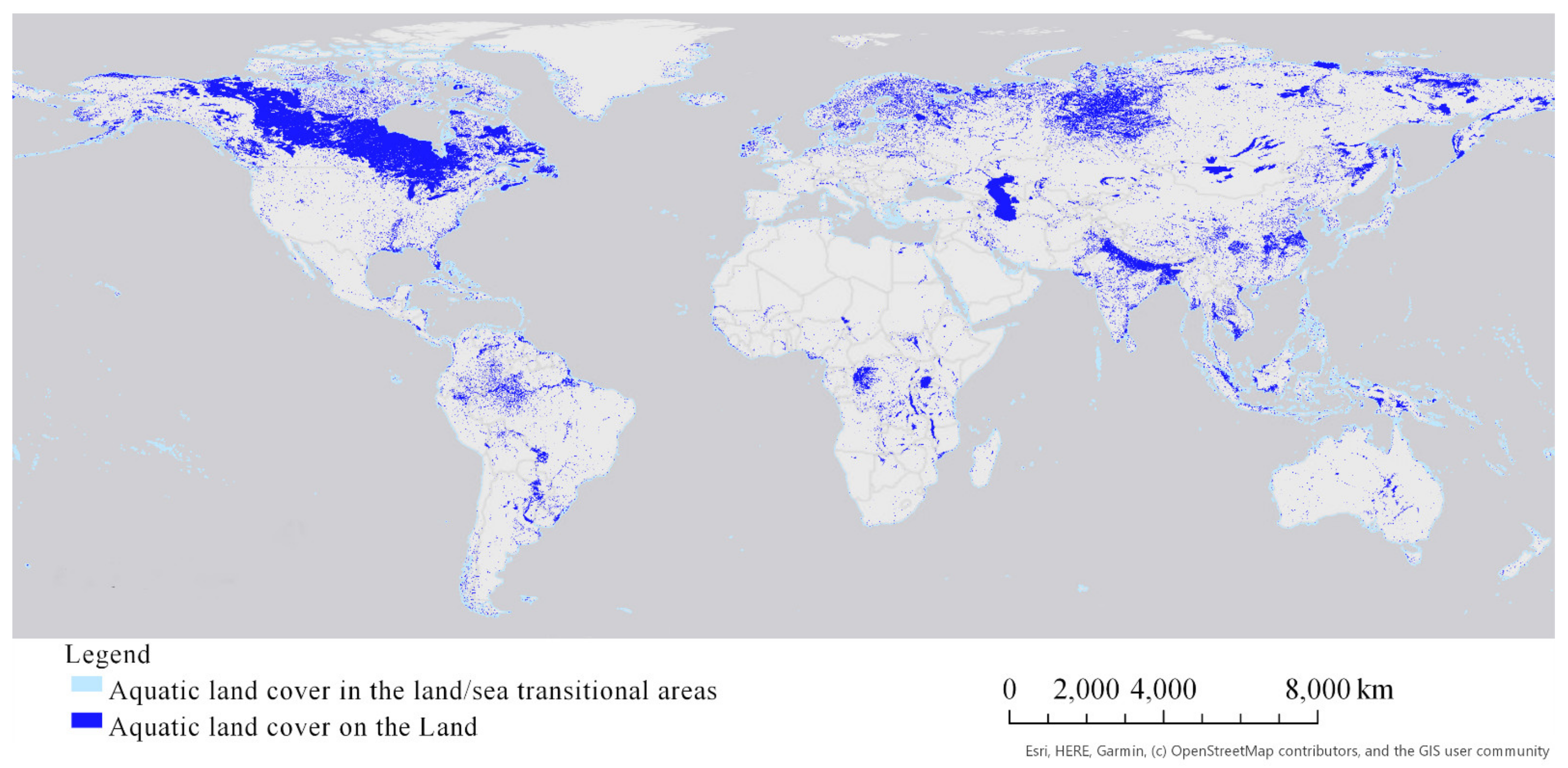
3.1. Level-1: Aquatic Land Cover
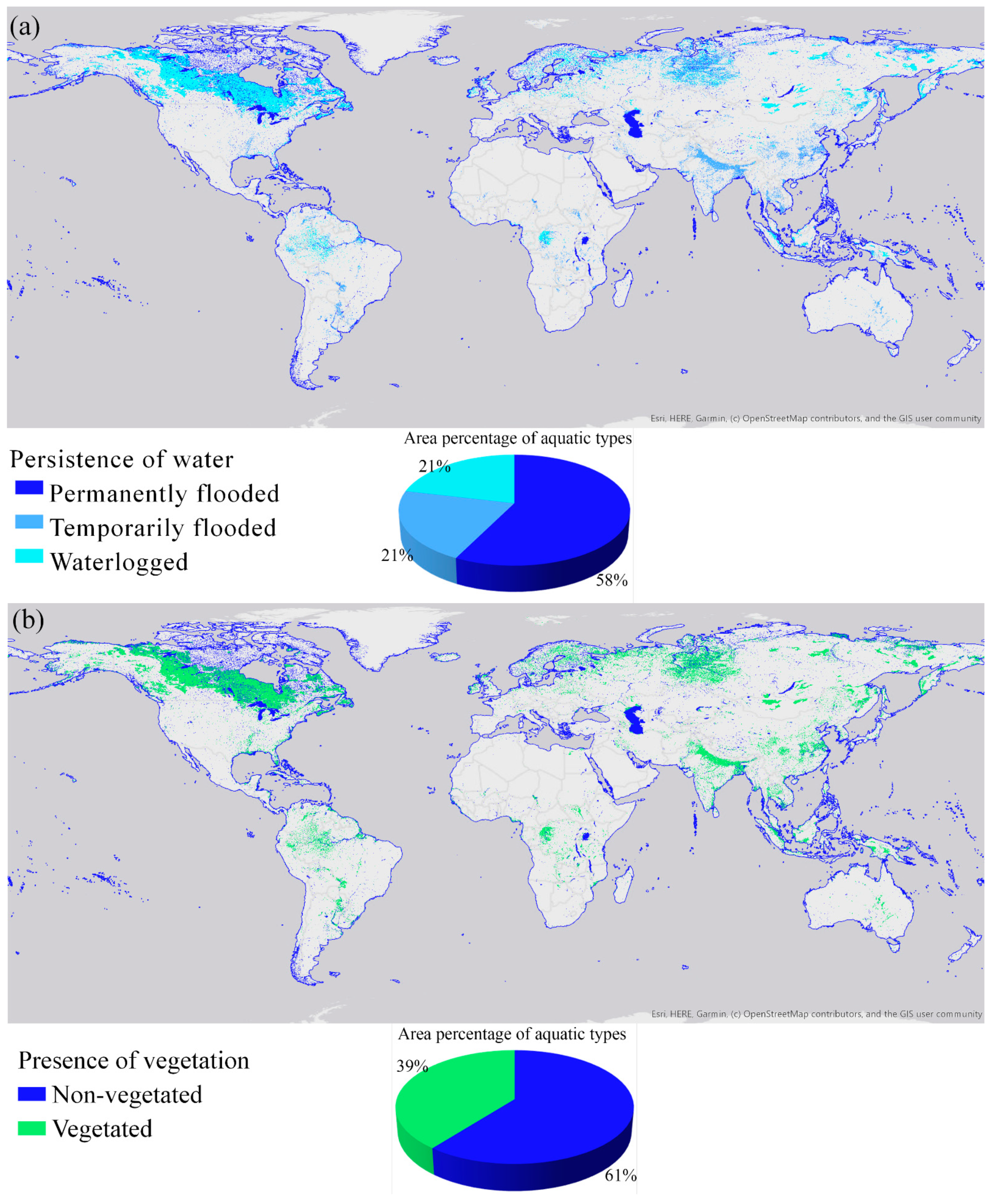
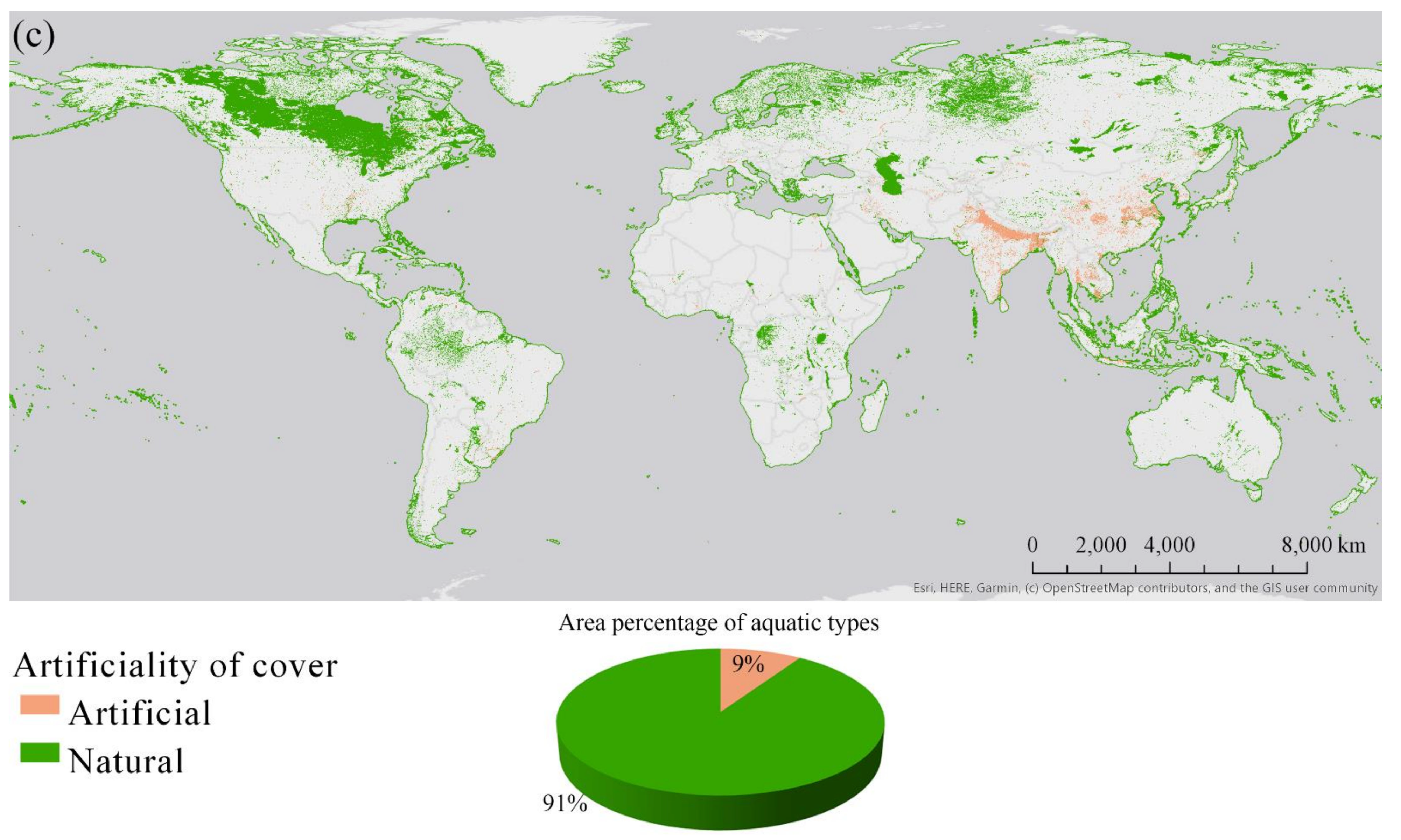
3.2. Level-2: Persistence of Water, Presence of Vegetation, and Artificiality of Cover
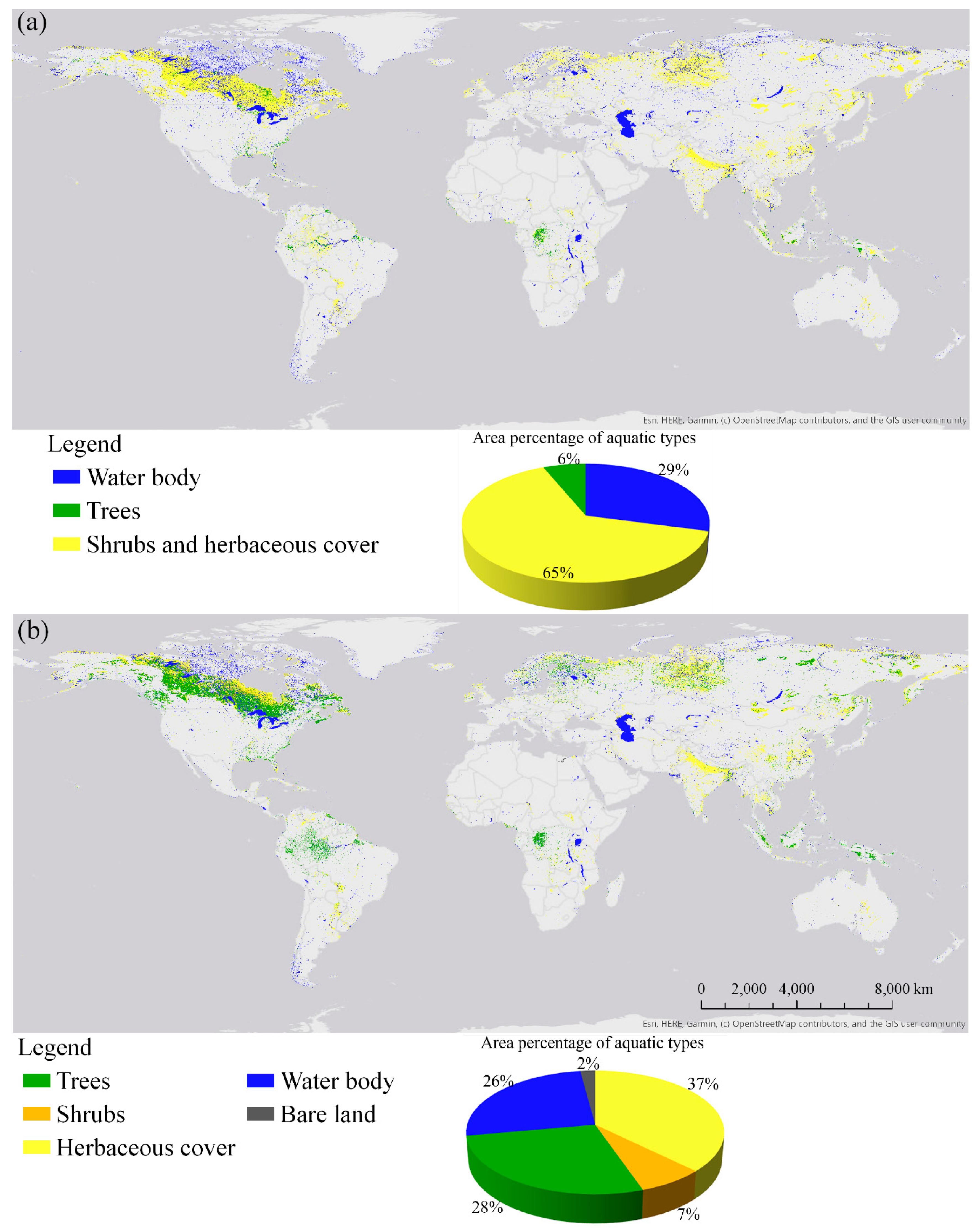
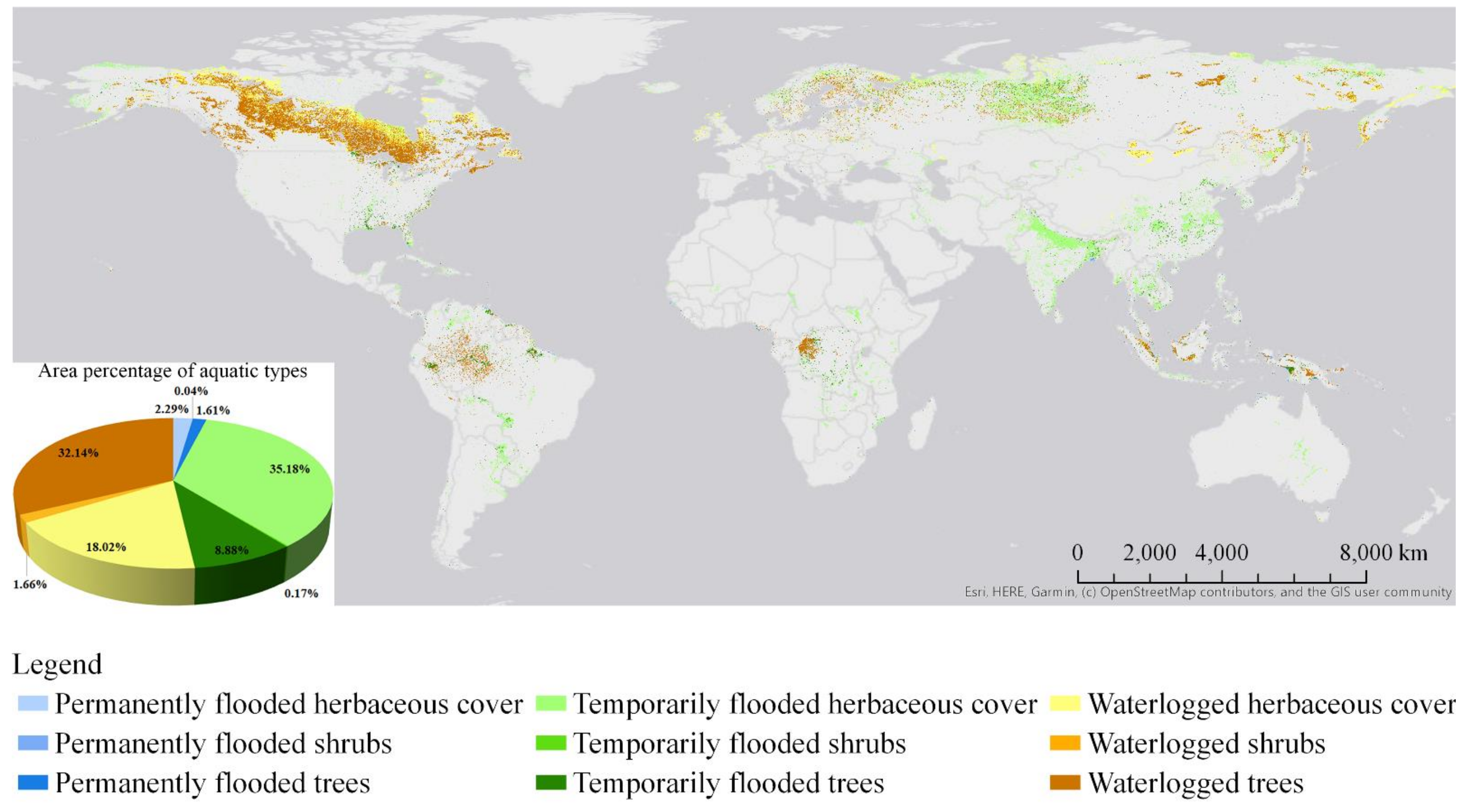
3.3. Level-3: Life Form
4. Discussion
4.1. Limitations of Current Global Datasets in GALC Mapping
4.1.1. General Classification of Global Aquatic Land Cover
4.1.2. Classification of Persistence of Water, Presence of Vegetation, and Artificiality of Cover
4.1.3. Classification of Aquatic Life Forms
4.2. Evolving EO Opportunities to Improve the GALC Characterization
4.3. Potential of the Prototype GALC Database in Addressing Multiple User Needs
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Di Gregorio, A. Land Cover Classification System: Classification Concepts and User Manual; Food and Agriculture Organization: Rome, Italy, 2005. [Google Scholar]
- Mitsch, W.J.; Gosselink, J.G. Wetlands, 4th ed.; Wiley: New York, NY, USA, 2007. [Google Scholar]
- Finlayson, C.M.; Gardner, R.C. Ten key issues from the Global Wetland Outlook for decision makers. Mar. Freshw. Res. 2021, 72, 301–310. [Google Scholar] [CrossRef]
- Slagter, B.; Tsendbazar, N.-E.; Vollrath, A.; Reiche, J. Mapping wetland characteristics using temporally dense Sentinel-1 and Sentinel-2 data: A case study in the St. Lucia wetlands, South Africa. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102009. [Google Scholar] [CrossRef]
- Hu, S.; Niu, Z.; Chen, Y. Global Wetland Datasets: A Review. Wetlands 2017, 37, 807–817. [Google Scholar] [CrossRef]
- Xu, P.; Herold, M.; Tsendbazar, N.-E.; Clevers, J.G.P.W. Towards a comprehensive and consistent global aquatic land cover characterization framework addressing multiple user needs. Remote Sens. Environ. 2020, 250, 112034. [Google Scholar] [CrossRef]
- Lehner, B.; Döll, P. Development and validation of a global database of lakes, reservoirs and wetlands. J. Hydrol. 2004, 296, 1–22. [Google Scholar] [CrossRef]
- Amler, E.; Schmidt, M.; Menz, G. Definitions and Mapping of East African Wetlands: A Review. Remote Sens. 2015, 7, 5256–5282. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Tian, H.; Lu, C.; Chen, G.; Pan, S.; Anderson, C.; Poulter, B. Methane emissions from global wetlands: An assessment of the uncertainty associated with various wetland extent data sets. Atmos. Environ. 2017, 165, 310–321. [Google Scholar] [CrossRef]
- Hondula, K.L.; Jones, C.N.; Palmer, M. Effects of seasonal inundation on methane fluxes from forested freshwater wetlands. Environ. Res. Lett. 2021, 16, 084016. [Google Scholar] [CrossRef]
- Turetsky, M.R.; Kotowska, A.; Bubier, J.; Dise, N.B.; Crill, P.; Hornibrook, E.R.C.; Minkkinen, K.; Moore, T.R.; Myers-Smith, I.H.; Nykänen, H.; et al. A synthesis of methane emissions from 71 northern, temperate, and subtropical wetlands. Glob. Chang. Biol. 2014, 20, 2183–2197. [Google Scholar] [CrossRef]
- Ramsar Convention Secretariat. An Introduction to the Convention on Wetlands (Previously the Ramsar Convention Manual); Ramsar Convention Secretariat: Gland, Switzerland, 2016. [Google Scholar]
- Warner, B.G.; Rubec, C.D.A. The Canadian Wetland Classification System; Wetlands Research Centre, University of Waterloo: Waterloo, ON, Canada, 1997. [Google Scholar]
- Herold, M.; Mayaux, P.; Woodcock, C.E.; Baccini, A.; Schmullius, C. Some challenges in global land cover mapping: An assessment of agreement and accuracy in existing 1 km datasets. Remote Sens. Environ. 2008, 112, 2538–2556. [Google Scholar] [CrossRef]
- Tsendbazar, N.-E.; de Bruin, S.; Herold, M. Integrating global land cover datasets for deriving user-specific maps. Int. J. Digit. Earth 2017, 10, 219–237. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Hoyos, A.; Udías, A.; Rembold, F. Integrating multiple land cover maps through a multi-criteria analysis to improve agricultural monitoring in Africa. Int. J. Appl. Earth Obs. Geoinf. 2020, 88, 102064. [Google Scholar] [CrossRef] [PubMed]
- Herold, M.; See, L.; Tsendbazar, N.-E.; Fritz, S. Towards an integrated global land cover monitoring and mapping system. Remote Sens. 2016, 8, 1036. [Google Scholar] [CrossRef] [Green Version]
- Bunting, P.; Rosenqvist, A.; Lucas, R.M.; Rebelo, L.-M.; Hilarides, L.; Thomas, N.; Hardy, A.; Itoh, T.; Shimada, M.; Finlayson, C.M. The global mangrove watch—A new 2010 global baseline of mangrove extent. Remote Sens. 2018, 10, 1669. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Lehner, B.; Liermann, C.R.; Revenga, C.; Vörömsmarty, C.; Fekete, B.; Crouzet, P.; Döll, P.; Endejan, M.; Frenken, K.; Magome, J.; et al. High-resolution mapping of the world’s reservoirs and dams for sustainable river-flow management. Front. Ecol. Environ. 2011, 9, 494–502. [Google Scholar] [CrossRef] [Green Version]
- Mcowen, C.J.; Weatherdon, L.V.; Van Bochove, J.-W.; Sullivan, E.; Blyth, S.; Zockler, C.; Stanwell-Smith, D.; Kingston, N.; Martin, C.S.; Spalding, M.; et al. A global map of saltmarshes. Biodivers. Data J. 2017, 5, e11764. [Google Scholar] [CrossRef]
- Xu, J.; Morris, P.J.; Liu, J.; Holden, J. PEATMAP: Refining estimates of global peatland distribution based on a meta-analysis. Catena 2018, 160, 134–140. [Google Scholar] [CrossRef] [Green Version]
- ESA. Land Cover CCI Product User Guide Version 2. 2017. Available online: https://maps.elie.ucl.ac.be/CCI/viewer/download/ESACCI-LC-Ph2-PUGv2_2.0.pdf (accessed on 10 April 2017).
- Buchhorn, M.; Lesiv, M.; Tsendbazar, N.-E.; Herold, M.; Bertels, L.; Smets, B. Copernicus global land cover layers-collection 2. Remote Sens. 2020, 12, 1044. [Google Scholar] [CrossRef] [Green Version]
- 25. Kobayashi, T.; Tateishi, R.; Alsaaideh, B.; Sharma, R.C.; Wakaizumi, T.; Miyamoto, D.; Bai, X.; Long, B.D.; Gegentana, G.; Maitiniyazi, A. Production of global land cover data–GLCNMO2013. J. Geogr. Geol. 2017, 9, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Tsendbazar, N.-E.; Tarko, A.J.; Li, L.; Herold, M.; Lesiv, M.; Fritz, S.; Maus, V. Copernicus Global Land Service: Land Cover 100m: Version 3 Globe 2015-2019: Validation Report; Zenodo: Geneva, Switzerland, 2020. [Google Scholar] [CrossRef]
- Tsendbazar, N.-E.; Herold, M.; de Bruin, S.; Lesiv, M.; Fritz, S.; Van De Kerchove, R.; Buchhorn, M.; Duerauer, M.; Szantoi, Z.; Pekel, J.-F. Developing and applying a multi-purpose land cover validation dataset for Africa. Remote Sens. Environ. 2018, 219, 298–309. [Google Scholar] [CrossRef] [Green Version]
- Powers, D.M. Evaluation: From precision, recall and F-measure to ROC, informedness, markedness and correlation. J. Mach. Learn. Technol. 2011, 2, 26. [Google Scholar]
- GDAL/OGR Contributors. GDAL/OGR Geospatial Data Abstraction Software Library. 2021. Available online: https://gdal.org/ (accessed on 1 September 2021).
- Snyder, J.P. Map Projections—A Working Manual; US Geological Survey Professional Paper 1395; U.S. Government Printing Office: Washington, DC, USA, 1987.
- Buchhorn, M.; Bertels, L.; Smets, B.; De Roo, B.; Lesiv, M.; Tsendbazar, N.-E.; Masiliunas, D.; Li, L. Copernicus Global Land Service: Land Cover 100m: Version 3 Globe 2015–2019: Algorithm Theoretical Basis Document; Zenodo: Geneva, Switzerland, 2020. [Google Scholar] [CrossRef]
- Messager, M.L.; Lehner, B.; Grill, G.; Nedeva, I.; Schmitt, O. Estimating the volume and age of water stored in global lakes using a geo-statistical approach. Nat. Commun. 2016, 7, 1–11. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Card, D.H. Using Known Map Category Marginal Frequencies to Improve Estimates of Thematic Map Accuracy. Photogramm. Eng. Remote. Sens. 1982, 48, 431–439. [Google Scholar]
- Hu, S.; Niu, Z.; Chen, Y.; Li, L.; Zhang, H. Global wetlands: Potential distribution, wetland loss, and status. Sci. Total Environ. 2017, 586, 319–327. [Google Scholar] [CrossRef] [PubMed]
- Tootchi, A.; Jost, A.; Ducharne, A. Multi-source global wetland maps combining surface water imagery and groundwater constraints. Earth Syst. Sci. Data 2019, 11, 189–220. [Google Scholar] [CrossRef] [Green Version]
- Gallant, A.L. The challenges of remote monitoring of wetlands. Remote Sens. 2015, 7, 10938–10950. [Google Scholar] [CrossRef] [Green Version]
- Corcoran, J.M.; Knight, J.F.; Gallant, A.L. Influence of multi-source and multi-temporal remotely sensed and ancillary data on the accuracy of random forest classification of wetlands in northern Minnesota. Remote Sens. 2013, 5, 3212–3238. [Google Scholar] [CrossRef] [Green Version]
- Ludwig, C.; Walli, A.; Schleicher, C.; Weichselbaum, J.; Riffler, M. A highly automated algorithm for wetland detection using multi-temporal optical satellite data. Remote Sens. Environ. 2019, 224, 333–351. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Hird, J.N.; DeLancey, E.R.; McDermid, G.J.; Kariyeva, J. Google Earth Engine, Open-Access Satellite Data, and Machine Learning in Support of Large-Area Probabilistic Wetland Mapping. Remote Sens. 2017, 9, 1315. [Google Scholar] [CrossRef] [Green Version]
- Bioresita, F.; Puissant, A.; Stumpf, A.; Malet, J.-P. Fusion of Sentinel-1 and Sentinel-2 image time series for permanent and temporary surface water mapping. Int. J. Remote Sens. 2019, 40, 9026–9049. [Google Scholar] [CrossRef]
- Li, Y.; Niu, Z.; Xu, Z.; Yan, X. Construction of high spatial-temporal water body dataset in China based on Sentinel-1 archives and GEE. Remote Sens. 2020, 12, 2413. [Google Scholar] [CrossRef]
- Mahdavi, S.; Salehi, B.; Granger, J.; Amani, M.; Brisco, B.; Huang, W. Remote sensing for wetland classification: A comprehensive review. GIScience Remote. Sens. 2018, 55, 623–658. [Google Scholar] [CrossRef]
- Lefebvre, G.; Davranche, A.; Willm, L.; Campagna, J.; Redmond, L.; Merle, C.; Guelmami, A.; Poulin, B. Introducing WIW for detecting the presence of water in wetlands with landsat and sentinel satellites. Remote Sens. 2019, 11, 2210. [Google Scholar] [CrossRef] [Green Version]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P. Flood monitoring in vegetated areas using multitemporal Sentinel-1 data: Impact of time series features. Water 2019, 11, 1938. [Google Scholar] [CrossRef] [Green Version]
- Potapov, P.; Li, X.; Hernandez-Serna, A.; Tyukavina, A.; Hansen, M.C.; Kommareddy, A.; Pickens, A.; Turubanova, S.; Tang, H.; Silva, C.E.; et al. Mapping global forest canopy height through integration of GEDI and Landsat data. Remote Sens. Environ. 2021, 253, 112165. [Google Scholar] [CrossRef]
- Quegan, S.; Le Toan, T.; Chave, J.; Dall, J.; Exbrayat, J.-F.; Minh, D.H.T.; Lomas, M.; D’Alessandro, M.M.; Paillou, P.; Papathanassiou, K.; et al. The European Space Agency BIOMASS mission: Measuring forest above-ground biomass from space. Remote Sens. Environ. 2019, 227, 44–60. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Chen, H.; White, J.C.; Wulder, M.A.; Hermosilla, T. Discriminating treed and non-treed wetlands in boreal ecosystems using time series Sentinel-1 data. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 102007. [Google Scholar] [CrossRef]
- Chen, X.; Liu, L.; Zhang, X.; Xie, S.; Lei, L. A Novel Water Change Tracking Algorithm for Dynamic Mapping of Inland Water Using Time-Series Remote Sensing Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1661–1674. [Google Scholar] [CrossRef]
- Stamou, A.; Polydera, A.; Papadonikolaki, G.; Martínez-Capel, F.; Muñoz-Mas, R.; Papadaki, C.; Zogaris, S.; Bui, M.-D.; Rutschmann, P.; Dimitriou, E. Determination of environmental flows in rivers using an integrated hydrological-hydrodynamic-habitat modelling approach. J. Environ. Manag. 2018, 209, 273–285. [Google Scholar] [CrossRef] [PubMed]
- Ye, A.Z.; Zhou, Z.; You, J.J.; Ma, F.; Duan, Q.Y. Dynamic Manning’s roughness coefficients for hydrological modelling in basins. Hydrol. Res. 2018, 49, 1379–1395. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [Green Version]
- Pickens, A.H.; Hansen, M.C.; Hancher, M.; Stehman, S.V.; Tyukavina, A.; Potapov, P.; Marroquin, B.; Sherani, Z. Mapping and sampling to characterize global inland water dynamics from 1999 to 2018 with full Landsat time-series. Remote Sens. Environ. 2020, 243, 111792. [Google Scholar] [CrossRef]
- United Nations. Transforming Our World: The 2030 Agenda for Sustainable Development; Department of Economic and Social Affairs, United Nations: New York, NY, USA, 2015. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset Name | Abbreviation | Aquatic Land Cover Class | Year of Data | Spatial Resolution/MMUs | Overall Accuracy (%) | Producer’s Accuracy (%) | User’s Accuracy (%) | Reference | Data Access |
|---|---|---|---|---|---|---|---|---|---|
| Global Mangrove Watch | GMW | Mangroves | 2015 | 25 m | 95 | 94 | 98 | [18] | https://data.unep-wcmc.org/datasets/45 (accessed on 14 June 2019) |
| Global Surface Water | GSW | Permanent water (12 months), seasonal water (<12 months) | 2015 | 30 m | Null | ≥95 | ≥99 | [19] | https://global-surface-water.appspot.com/download (accessed on 15 December 2016) |
| Global Reservoir and Dam database Version 1.3 | GRanD | Reservoirs | Updated to 2016 | 30 m to 0.5° | GRanD captured more than 75% of the total global storage capacity. Estimates of GRanD agreed well with the total surface area recorded in the World Register of Dams (ICOLD 1998–2009). | [20] | http://globaldamwatch.org/data/#core_global (accessed on 26 February 2019) | ||
| Global map of saltmarshes | Global saltmarsh | Saltmarshes | 1973–2015 | 5 m to 2 km; 1:10,000 to 1:4,000,000 | This dataset collated 350,985 individual occurrences of saltmarshes and presented the most complete description of saltmarsh occurrence and extent at the global scale. | [21] | https://data.unep-wcmc.org/datasets/43 (accessed on 1 June 2018) | ||
| Global peatland map | PEATMAP | Peatlands | 1990–2013 | 25 m to 1 km; 1:25000 to 1:6500000 | PEATMAP refined the estimate of peatland extent compared with previous global peatland databases. | [22] | http://archive.researchdata.leeds.ac.uk/251/ (accessed on 19 September 2017) | ||
| Climate Change Initiative Land Cover product | CCI-LC | Tree cover, flooded, fresh or brackish water (160); tree cover, flooded, saline water (170); shrub or herbaceous cover, flooded, fresh/saline/brackish water (180); water bodies | 2015 | 300 m | 72 | Class 160: 86; Class 170: 86; Class 180: 24; water bodies 90 | Class 160: 26; Class 170: 75; Class 180: 53; water bodies 92 | [23] | http://maps.elie.ucl.ac.be/CCI/viewer/download.php (accessed on 10 April 2017) |
| Copernicus Global Land Service—global Land Cover product at 100 m (discrete map) | CGLS-LC100 | Herbaceous wetland; permanent water bodies | 2015 | 100 m | 80 | Herbaceous wetland 44; permanent water 87 | Herbaceous wetland 47; permanent water 95 | [24] | https://zenodo.org/record/3939038#.YV233tpBxPY (accessed on 8 September 2020) |
| Global Land Cover by National Mapping Organizations 2013 | GLCNMO2013 | Mangrove; paddy field; water bodies | 2013 | 500 m | 75 | Mangrove 91; paddy field 77; water bodies 93 | Mangrove 98; paddy field 84; water bodies 100 | [25] | https://globalmaps.github.io/glcnmo.html (accessed on 20 February 2017) |
| Dataset Name | Ranking of Spatial Resolution | Ranking of Year of Data | F-Score | Ranking of F-Score | Average Ranking Score | Priority |
|---|---|---|---|---|---|---|
| GSW | 1 | 1 | 0.97 | 1 | 1.0 | 1 |
| GMW | 1 | 1 | 0.96 | 2 | 1.3 | 2 |
| CGLS-LC100 | 2 | 1 | 0.68 | 4 | 2.3 | 3 |
| CCI-LC | 3 | 1 | 0.61 | 5 | 3.0 | 4 |
| GLCNMO2013 | 4 | 3 | 0.9 | 3 | 3.3 | 5 |
| GRanD | 6 | 2 | 0 | 6 | 4.7 | 6 |
| PEATMAP | 5 | 4 | 0 | 6 | 5.0 | 7 |
| Global saltmarsh | 6 | 5 | 0 | 6 | 5.7 | 8 |
| Dataset Name | Aquatic Classes | Level-1 | Level-2 | Level-3 | ||
|---|---|---|---|---|---|---|
| Persistence of Water | Presence of Vegetation | Artificiality of Cover | Life Form | |||
| GSW | Permanent water (present ≥ 9 months) | Aquatic | Permanently flooded | Non-vegetated | Artificial; natural | Water body |
| Seasonal water (present < 9 months) | Aquatic | Temporarily flooded | Non-vegetated | Artificial; natural | Water body | |
| GMW | Mangroves | Aquatic | Permanently flooded | Vegetated | Natural | Trees |
| CGLS-LC100 | Herbaceous wetland | Aquatic | Temporarily flooded | Vegetated | Natural | Herbaceous cover |
| CCI-LC | Tree cover, flooded, fresh or brackish water | Aquatic | Permanently flooded; temporarily flooded | Vegetated | Natural | Trees |
| Shrub or herbaceous cover, flooded, fresh/saline/brackish water | Aquatic | Permanently flooded; temporarily flooded; waterlogged | Vegetated | Natural | Shrubs; herbaceous cover | |
| GLCNMO2013 | Paddy field | Aquatic | Temporarily flooded | Vegetated | Artificial | Herbaceous cover |
| GRanD | Reservoirs (including dam-regulated natural lakes) | Aquatic | Permanently flooded | Non-vegetated | Artificial; natural | Water body |
| PEATMAP | Peatlands | Aquatic | Waterlogged | Vegetated | Natural | Shrubs; herbaceous cover |
| Global saltmarsh | Saltmarshes | Aquatic | Temporarily flooded | Vegetated | Natural | Herbaceous cover |
| Level-1 | Reference | Sample Count | Total | User’s Accuracy (%) | Confidence Interval ± | ||
|---|---|---|---|---|---|---|---|
| Aquatic | Non-Aquatic | ||||||
| Map | Aquatic | 0.03 | 0.07 | 4493 | 0.10 | 32.7 | 1.9 |
| Non-Aquatic | 0.01 | 0.90 | 22,221 | 0.91 | 99.4 | 0.1 | |
| Sample count | 2989 | 23,725 | 26,714 | ||||
| Total | 0.04 | 0.97 | |||||
| Producer’s accuracy (%) | 86.1 | 93.2 | 93.0 | 0.4 | |||
| Confidence interval ± | 2.9 | 0.4 | |||||
| Persistence of Water | Reference | Sample Count | Total | User’s Accuracy (%) | Confidence Interval ± | |||
|---|---|---|---|---|---|---|---|---|
| Permanently Flooded | Temporarily Flooded | Waterlogged | ||||||
| Map | Permanently flooded | 0.37 | 0.12 | 0.09 | 223 | 0.58 | 63.7 | 5.1 |
| Temporarily flooded | 0.09 | 0.09 | 0.03 | 299 | 0.21 | 41.1 | 8.6 | |
| Waterlogged | 0.05 | 0.11 | 0.05 | 76 | 0.21 | 25.0 | 7.5 | |
| Sample count | 288 | 208 | 102 | 598 | ||||
| Total | 0.51 | 0.32 | 0.17 | |||||
| Producer’s accuracy (%) | 71.9 | 27.7 | 30.3 | 50.7 | 3.8 | |||
| Confidence interval ± | 4.3 | 4.8 | 7.5 | |||||
| Presence of Vegetation | Reference | Sample Count | Total | User’s Accuracy (%) | Confidence Interval ± | ||
|---|---|---|---|---|---|---|---|
| Non-Vegetated | Vegetated | ||||||
| Map | Non-Vegetated | 0.31 | 0.30 | 294 | 0.61 | 50.3 | 5.1 |
| Vegetated | 0.06 | 0.33 | 304 | 0.39 | 83.9 | 4.7 | |
| Sample count | 197 | 401 | 598 | ||||
| Total | 0.37 | 0.63 | |||||
| Producer’s accuracy (%) | 82.8 | 52.2 | 63.5 | 3.6 | |||
| Confidence interval ± | 4.5 | 2.2 | |||||
| Artificiality of Cover | Reference | Sample Count | Total | User’s Accuracy (%) | Confidence Interval ± | ||
|---|---|---|---|---|---|---|---|
| Artificial | Natural | ||||||
| Map | Artificial | 0.03 | 0.07 | 56 | 0.10 | 26.8 | 11.3 |
| Natural | 0.04 | 0.86 | 542 | 0.90 | 95.0 | 1.8 | |
| Sample count | 42 | 556 | 598 | ||||
| Total | 0.07 | 0.93 | |||||
| Producer’s accuracy (%) | 37.1 | 92.2 | 88.3 | 2.0 | |||
| Confidence interval ± | 11.8 | 2.1 | |||||
| Level-3 | Reference | Sample Count | Total | User’s Accuracy (%) | Confidence Interval ± | |||
|---|---|---|---|---|---|---|---|---|
| Water Body | Shrubs and Herbaceous Cover | Trees | ||||||
| Map | Integrated Life Form | |||||||
| Water body | 0.15 | 0.11 | 0.03 | 208 | 0.29 | 51.9 | 8.2 | |
| Shrubs and herbaceous cover | 0.09 | 0.41 | 0.15 | 216 | 0.65 | 63.0 | 5.4 | |
| Trees | 0.01 | 0.05 | 0.01 | 59 | 0.07 | 18.6 | 13.8 | |
| Sample count | 142 | 258 | 83 | 483 | ||||
| Total | 0.25 | 0.57 | 0.19 | |||||
| Producer’s accuracy (%) | 62.3 | 72.1 | 6.1 | 56.9 | 4.3 | |||
| Confidence interval ± | 6.9 | 4.5 | 4.0 | |||||
| CGLS Life Form | ||||||||
| Water body | 0.16 | 0.08 | 0.02 | 164 | 0.26 | 61.0 | 8.5 | |
| Shrubs and herbaceous cover | 0.05 | 0.24 | 0.07 | 249 | 0.36 | 66.7 | 7.0 | |
| Trees | 0.05 | 0.21 | 0.10 | 70 | 0.36 | 27.1 | 6.6 | |
| Sample count | 142 | 258 | 83 | 483 | ||||
| Total | 0.26 | 0.53 | 0.19 | |||||
| Producer’s accuracy (%) | 61.7 | 45.1 | 51.0 | 50.0 | 4.1 | |||
| Confidence interval ± | 6.9 | 3.9 | 8.9 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, P.; Tsendbazar, N.-E.; Herold, M.; Clevers, J.G.P.W. Assessing a Prototype Database for Comprehensive Global Aquatic Land Cover Mapping. Remote Sens. 2021, 13, 4012. https://doi.org/10.3390/rs13194012
Xu P, Tsendbazar N-E, Herold M, Clevers JGPW. Assessing a Prototype Database for Comprehensive Global Aquatic Land Cover Mapping. Remote Sensing. 2021; 13(19):4012. https://doi.org/10.3390/rs13194012
Chicago/Turabian StyleXu, Panpan, Nandin-Erdene Tsendbazar, Martin Herold, and Jan G. P. W. Clevers. 2021. "Assessing a Prototype Database for Comprehensive Global Aquatic Land Cover Mapping" Remote Sensing 13, no. 19: 4012. https://doi.org/10.3390/rs13194012