1. Introduction
The use of unmanned aerial vehicles (UAVs) for remote sensing has become more common in the study of natural hazards and geomorphological processes, especially due to the development of technologies and mapping systems at larger scales, leading to a more comprehensive understanding of natural processes. UAVs are especially suitable for studying and monitoring rockfalls [
1,
2,
3,
4], due to their smaller spatial extent and the fact that the potential rockfall areas are often located on steep slopes above infrastructure and settlements, where the terrain is hardly accessible and dangerous for classical field observations [
5,
6,
7,
8]. Structure-from-motion (SfM) photogrammetry enables the production of various high-resolution photogrammetric-derived products, such as point clouds, 3D models of the surface, digital surface models (DSMs), digital terrain models (DTMs), and orthomosaics [
9,
10]. The use of a UAV is suitable for the acquisition of remote sensing data at a local scale (a few square kilometers), to which rockfalls are mostly limited [
11]. As UAVs are less demanding to operate, compared to other remote sensing technologies (e.g., aerial photogrammetry, satellites, etc.), both from the temporal and financial point of view, the area of interest can be surveyed several times over shorter time periods, thus achieving greater spatial (i.e., centimeter resolution) and temporal resolution of data [
12,
13].
Previous photogrammetric rockfall hazard studies have focused on the potential of photogrammetry for different applications, regarding the vertical and sub-vertical rock slopes, as well as rockfall transit and deposit areas. The purpose of these studies was to (i) identify potentially unstable blocks, wedges, joints, and blocks of the rockfalls; (ii) extract rockfall discontinuities; (iii) identify potential rockfall release areas; and (iv) obtain spatial data for rockfall modeling and rockfall risk assessment [
3,
5,
7,
8,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23]. Photogrammetric studies of rock faces have also included comparing and combining UAV photogrammetric data with data obtained by aerial and terrestrial laser scanning.
1.1. Challenges of UAV Photogrammetric Georeferencing
The positions and orientations of acquired aerial images must be known in order to provide satisfactory accuracy of photogrammetric products, either by using the indirect georeferencing approach with the use of ground control points (GCPs) or an approach using bundle block adjustment (BBA) without GCPs. The indirect approach performs aerial triangulation (AT) with BBA, using GCPs and/or the airborne global navigation satellite system (GNSS)-assisted controls (i.e., the coordinates, X
0, Y
0, and Z
0 of the perspective centers), while BBA approaches without GCPs involve position and orientation measurements being obtained during camera capturing, and each aerial image is geolocated without any need for GCPs [
24,
25]. The position (X
0, Y
0 and Z
0) is measured by the GNSS system, and the camera orientation angles (w, φ and k) by an Inertial Measurement Unit (IMU). The measurements form six parameters, called Exterior parameters (EO), which are used in the collinearity equation for georeferencing [
26]. A majority of UAVs use GNSS systems that do not provide high spatial accuracy (i.e., meter-level accuracy) [
27,
28] of the images, meaning that the support of GCPs is crucial for increasing accuracy.
Due to its highest accuracy, indirect georeferencing is preferably used in the SfM photogrammetry. While the preparation and execution of a UAV flight, in the case of indirect georeferencing, can be performed from a safe location, the placement of the GCPs needed in this situation must be performed directly within the area of interest. Surveying of rockfalls can be an extremely challenging and dangerous field operation [
27,
29], due to their environmental and geomorphological conditions (e.g., steep slopes, rock walls, scree slopes, etc.), making them hard to access. To achieve the highest possible accuracy, GCPs need to be placed homogeneously throughout the area of interest, covering the edges of the area and having similar distances between them [
30,
31]. In the case of rockfalls, this means placing them within rockfall deposit areas and also above the rock cliffs, which could result in potentially more field workers in the field and separate surveys of the area. The field workers are exposed to the dangers of new rockfall events, displacements of already deposited rocks in the rockfall transit area, and other steep terrain-related dangers (e.g., falls, damages to the surveying equipment, etc.). The process of establishing the GCP network and measuring them with, for example, a total station or GNSS with RTK (Real-Time Kinematic) mode to achieve horizontal accuracies of 0.010–0.020 m and vertical accuracies of 0.020–0.030 m [
32], is therefore not only dangerous but also time- and labor-intensive [
29,
33].
Due to the time-consuming procedure of indirect georeferencing with GCPs, UAV platforms that allow for georeferencing of BBA without GCPs have been introduced (see, e.g., References [
34,
35]). They use the so-called RTK, NRTK (Network Real-Time Kinematics), and PPK (Post-Processing Kinematics) solutions, based on a multi-frequency multi-constellation of GNSS receivers. By using GNSS RTK, positional data are acquired from satellites and a base station providing real-time high-accuracy positions, such that corrections in real time are applied to the data onsite. Although the PPK method gathers positional data by using virtual reference station (VRS) or continuously operating reference stations (CORS) in a similar manner, the corrections are applied in the post-processing stage. With the accuracies of those methods being comparable to that of indirect georeferencing, the GCPs would not be needed, thus decreasing the time required for the acquisition and processing of the data [
29,
36,
37].
1.2. Previous Work on UAV Images Georeferencing without GCPs
Several studies have considered using image georeferencing without GCPs in the production of UAV-photogrammetric-derived products. In the following paragraphs, we present a short overview of the results provided only by UAV imagery georeferencing, using BBA without GCPs (BBA_PPK). A complete overview of the reviewed studies is available in
Appendix A.
Summarizing the reviewed studies, the study area, in most of cases was a flat agricultural area [
37,
38,
39,
40,
41], or an industrial/residential area [
25,
27,
32,
33,
42,
43,
44,
45,
46,
47]. Fewer studies have focused on areas, such as quarries [
36,
41,
48], coastal areas [
49], forests [
28], and cultural and archeological sites [
31,
50]. These studies have largely used two types of UAV—senseFly eBee RTK [
25,
27,
28,
32,
36,
43,
47] and DJI Phantom 4 RTK [
31,
44,
45,
46,
47,
49,
50]—while others have used different UAV options [
33,
37,
38,
39,
40,
41,
42]. Some studies have combined different UAV RTK drones and cameras [
27,
37,
40]. BBA approaches without GCPs points methods mostly have used receiver stations located within the area of interest, while in some cases positional data were applied explicitly from the CORS stations. The configuration of the UAV flights was mostly parallel to the surface and cross-grid with fixed flying height. Some of the studies also tested different configurations, with regard to the flying heights and patterns, including different angles for acquiring images. The front overlap of images was mostly above 70%, and side overlap was about 60%.
The accuracy of photogrammetric-derived products can be assessed by comparing the photogrammetric models against a reference, or by using verification points (VPs) surveyed with traditional topographical methods, and identified within the BBA and orthomosaics/DSM [
51]. In this review, we only included the results for the latter case, as we used the same approach, and focused on horizontal and vertical accuracies that were either compared for BBA, orthomosaics, and DSM. Observing the results for BBA, studies have reported a horizontal accuracy between 0.020 and 0.060 m, and vertical from 0.040 up to 0.300 m. Some studies have also reported lower accuracies: the specifics of these UAV flights were higher flying altitudes of the UAV, flying in only one direction, surveying vegetated areas and areas that are more diverse with extreme elevation changes, and with the CORS station at larger distances (especially affecting the vertical accuracy) [
28,
31,
39,
41,
48,
49]. Horizontal accuracies of orthomosaics have revealed similar results, with values of 0.020–0.050 m, except for Mian et al. (2016) [
38] and Tomaštik et al. (2019) [
28], where the accuracies resulting from different flight setups and vegetation conditions varied between 0.044 and 0.087 m. Vertical accuracy estimated from the DSM is, in the best case 0.030 m, reaching up to 0.200 m, with some exceptions exceeding these values [
37,
38].
1.3. Aim of the Study
A majority of the presented studies in
Section 1.2. were carried out in flat areas with homogeneous terrain conditions (except for the studies by Hugenholtz et al. [
36], Tomaštík et al. [
28], and Tufarolo et al. [
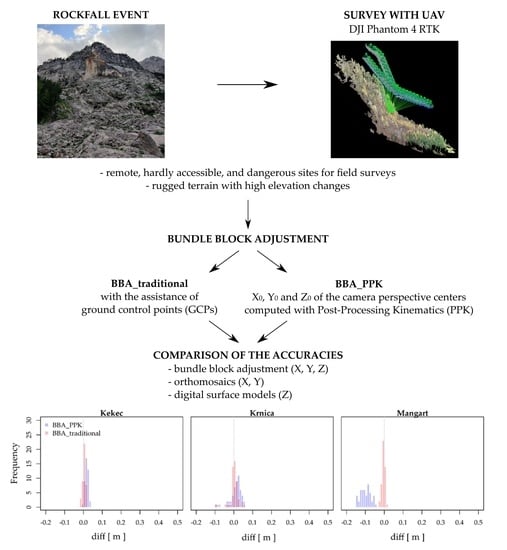
48]), where there is less satellite obstruction, better signal reception, and finally conditions for measuring GCPs and VPs. In our research, we wanted to test the accuracies of the photogrammetric products in the case of rockfalls, as the conditions for a survey of high-accuracy data (e.g., GCP positions) are highly demanding, due to the higher terrain roughness and larger elevation changes. It is crucial for surveyors of these environments to know whether it is possible to achieve results comparable to those acquired by using georeferencing, without requiring any GCP assistance. Therefore, we question which georeferencing method is more appropriate and suitable for providing high-accuracy photogrammetric-derived products, taking into consideration all of described environmental challenges and risks of field operations in the event of rockfall hazards. Either it is permissible to use the georeferencing with PPK (BBA_PPK) method, or the use of indirect georeferencing (BBA_traditional) is still preferable and needed, especially in the case of planning technical protection measures where an accuracy of the order of centimeters is required. As we wish to minimize the amount of time that field operators spend on an active rockfall slope, the main goal of the research was to analyze which BBA method (BBA_traditional or BBA_PPK) provides more accurate photogrammetric-derived products (e.g., orthomosaics and DSMs). In the research, we compared the photogrammetric-derived products that have been produced strictly by georeferencing, using BBA_PPK and indirect georeferencing (using BBA_traditional only), to determine the possible applications in the event of rockfall studies.
The reason that we considered the option of not using BBA_PPK in combination with the BBA_ traditional method is that the surveying of rockfalls can sometimes be too risky to place any GCP below, for example, rock walls in the transit corridors of the falling rocks. However, rockfalls located in remote and hardly accessible areas are still valuable and need to be included in past rockfall databases. In our study, we are focused only on rockfall transit and deposit areas, where we are collecting data on past rockfall events needed for calibration and validation of rockfall models. For rockfall modeling, we require data on the volume, location, shape of individual rock deposits, and surface roughness of the slope, among others, and know that the accuracy of photogrammetric-derived products is crucial for rockfall modeling at different scales.
The remainder of the paper is structured as follows: In the Materials and Methods section, we describe the test site, the experimental setup for comparing the results of georeferencing with two different methods (i.e., AT with solely GCPs and using auxiliary data provided by PPK and no GCPs), the UAV feature and flight plan, data processing, measuring and obtaining the positions of the VPs, and statistical evaluation of the results. In the Results section, we present the differences in the accuracy, using VPs, of the BBA (X, Y, and Z), orthomosaics (X and Y), and DSM (Z), as obtained by the two georeferencing methods mentioned above. In the Discussion section, we explain the significance of the results, draw the main outcomes, and discuss possible future investigations. Due to different applications (e.g., comparison of photogrammetric points clouds and laser scanner point clouds; spatial planning—orthomosaics; and so on) [
51], our comparison of the results is carried out separately for BBA, for orthomosaics, and DSM.
3. Results
3.1. Assessing the Accuracy of Bundle Block Adjustment
Table 3 shows the several statistics computed to assess the accuracies of BBA_traditional and BBA_PPK. On the average, the BBA_traditional presented the smallest minimum value of the differences per coordinate. The differences range from −0.098 m (Krnica, diff
X) to 0.091 m (Krnica, diff
Y) in the case of BBA_traditional, while the differences with BBA_PPK were higher; they range from −0.171 m (Mangart, diff
Y) to 0.431 m (Mangart, diff
Z). The mean value of differences ranges from −0.006 m (Kekec, diff
Y) to 0.009 m (Kekec, diff
Z) in the case of BBA_traditional. The mean value of the differences with BBA_PPK were higher, and range from −0.109 m (Mangart, diff
Y) to 0.245 m (Mangart, diff
Z). The standard deviations of the differences were similar for both BBA methods for all coordinates when observing the Kekec (from 0.008 to 0.010 m) and Krnica site (from 0.014 to 0.031 m). At Mangart site, the BBA_PPK had larger standard deviations than BBA_traditional, namely reaching 0.028 for diff
X, 0.047 m for diff
Y, and 0.092 m for diff
Z, while BBA_traditional had values between 0.007 and 0.008 m.
The lowest RMSE values per coordinate were achieved with the BBA_traditional method at the Kekec and Mangart study sites, with the RMSE values lower than 0.015 m in all coordinates (Kekec, RMSEX = 0.009 m, RMSEY = 0.010 m, and RMSEZ = 0.014 m; Mangart, RMSEX = 0.009 m, RMSEY = 0.008 m, and RMSEZ = 0.007 m). At the Krnica study site, the results were slightly worse, but the RMSE in all coordinates did not exceed 0.029 m (Krnica, RMSEX = 0.026 m, RMSEY = 0.020 m, and RMSEZ = 0.015 m). The RMSE values per coordinate with the BBA_PPK method ranges from 0.019 to 0.050 m at the Kekec and Krnica rockfall site, while at the Mangart rockfall site, RMSE values per coordinate achieve values between 0.102 and 0.261 m.
The overall accuracy of BBA (RMSE
XYZ) was higher in the case of BBA_traditional (range from 0.014 to 0.036 m); namely, in the case of the BBA_PPK method, the RMSE
XYZ ranged from 0.056 to 0.305 m.
Figure 6 shows the frequency distributions of the diff
X, diff
Y, and diff
Z at the sites for both georeferencing methods. It can be observed that the differences related to BBA_traditional method are closely clustered around 0, having uni-modal distribution. The differences related to the BBA_traditional coincided with BBA_PPK, with the latter having a larger span of values, with the exception of the Mangart location, where the differences of BBA_traditional and BBA_PPK coincided in a small part or not at all.
A paired Student’s t-test, for testing whether there was a statistically significance difference in the mean value of differences between the BBA_traditional and BBA_PPK, was used in three cases: diffX, diffY, and diffZ in Mangart. In all cases, there was a statistically significant difference between the mean values (p ≤ 0.05). For the rest of the pairs, a non-parametric Wilcoxon signed-rank test was used, which showed that, only in the case of diffY at Krnica location, there was not a statistically significant difference between the median values between the georeferencing methods (p > 0.05).
3.2. Assessing Accuracy of Orthomosaic
Table 4 shows the statistics, as detailed in
Section 2.5, computed by measuring the VP at orthomosaics produced for the three study areas, and produced by carrying out the AT with the BBA_traditional and BBA_PPK methods. Similarly, as for BBA accuracy, the BBA_traditional method achieved the smallest difference in average in each coordinate, compared to the VPs. The differences range from −0.104 m (Krnica, diff
X) to 0.078 m (Krnica, diff
Y) in the case of BBA_traditional, while the differences with BBA_PPK were higher; they range from −0.181 m (Mangart, diff
Y) to −0.016 m (Mangart, diff
X). The mean value of differences ranges from −0.017 m (Kekec, diff
Y) to 0.018 m (Kekec, diff
X) in the case of BBA_traditional. The mean value of differences with BBA_PPK were higher, and range from −0.119 m (Mangart, diff
Y) to −0.089 m (Mangart, diff
X). The standard deviations of the differences were similar for both BBA methods for all coordinates when observing the Kekec (from 0.011 to 0.012 m) and Krnica site (from 0.022 to 0.027 m). At Mangart site, the BBA_PPK had larger standard deviations than BBA_traditional, namely reaching 0.026 m for diff
X and 0.045 m for diff
Y, while in case of BBA_traditional, standard deviation values were the same for diff
X and diff
Y (0.012 m). The RMSE values per coordinate were similar between the both coordinates in the case of BBA_traditional with all rockfall sites (0.020–0.021 m for Kekec, 0.025–0.026 m for Krnica, and 0.013–0.016 for Mangart). For the BBA_PPK method the RMSE values range from 0.031 to 0.034 m at the Kekec and Krnica rockfall site, while at the Mangart rockfall site RMSE values per coordinate achieve values between 0.093 and 0.127 m.
In
Figure 7, the frequency distributions of the diff
X and diff
Y for both georeferencing methods and all sites can be observed. Similar as with the assessment of BBA, the lowest values of differences were achieved by BBA_traditional, which had the densest distribution in all cases, and differences are clustered around 0. BBA_traditional’s differences did have an overlap with BBA_PPK, but the differences of BBA_PPK experienced larger variability. The location that stood out is Mangart, where the differences of X and Y retrieved from orthomosaic produced by BBA_PPK were larger and do mostly did not match with those of BBA_traditional. The overall accuracy of orthomosaic (RMSE
XY) was higher in the case of BBA_traditional (range from 0.020 to 0.036 m), while the RMSE
XY of orthomosaics produced by the BBA_PPK ranged from 0.039 to 0.157 m.
A paired Student’s t-test, for testing if there was a statistically significance difference in the mean value of differences between the BBA_traditional and BBA_PPK, was used in the following cases: diffX and diffY in Kekec, and diffX in Mangart. At all locations and coordinates, there were significance differences between the mean values (p ≤ 0.05). With other pairs, a non-parametric Wilcoxon signed-rank test was used, which also showed that there were statistically significant differences between the median values between the georeferencing methods in all of the cases (p ≤ 0.05).
3.3. Assessing Accuracy of DSM
The accuracy of DSMs was assessed through the differences between the VP coordinate (Z) and coordinate extracted from the BBA_traditional and BBA_PPK methods.
Table 5 shows the basic results for difference statistics for Z coordinate and the final RMSE
Z values. The differences range from −0.079 m (Krnica) to 0.165 m (Krnica) in the case of BBA_traditional, while the differences with BBA_PPK were higher; they range from −0.129 m (Krnica) to 0.453 m (Mangart). The mean value of differences ranges from −0.022 m (Mangart) to 0.026 m (Krnica) in the case of BBA_traditional. The mean value of differences with BBA_PPK were higher, and range from −0.002 m (Krnica) to 0.244 m (Mangart). The standard deviations of the differences were the same for both BBA methods at the Kekec site (0.037 m), while larger differences in standard deviation were present at the Krnica (0.055 m for BBA_traditional, 0.072 m for BBA_PPK) and Mangart site (0.021 m for BBA_traditional, 0.093 m for BBA_PPK).
RMSE
Z was generally smaller in the case of the BBA_traditional method; however, in comparison to the BBA_PPK method for the Kekec and Krnica, the difference was only 0.027 m and 0.012 m, respectively. Larger differences in RMSE
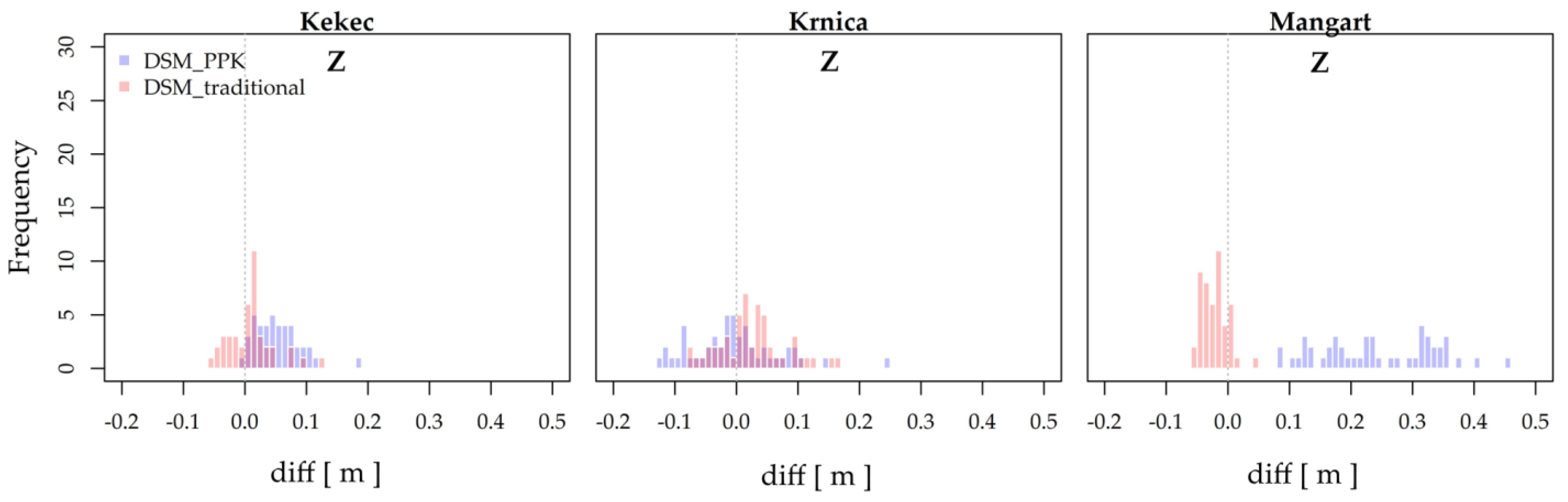
Z were presented for the Mangart rockfall, namely they reached 0.231 m. The frequency distribution of the Z coordinates (
Figure 8) indicates that DSM produced with BBA_traditional achieved the lowest differences, while the values had larger span, compared to the assessment of BBA alone. The differences of BBA_traditional and BBA_PPK coincided in a larger part of the frequency distribution, with the latter achieving larger differences. The results were, similar as with the assessment of BBA and orthomosaic, different at the Mangart location; where, for the DSM produced with BBA_PPK, the differences were larger and had greater span than those ones produced with BBA_traditional. Moreover, the differences did not coincide at all at the Mangart location.
To test for statistically significant differences in the mean value of differences between the BBA_traditional and BBA_PPK, a paired Student’s t-test was used for diffZ at the Krnica and Mangart site. It showed that there were statistically significant differences in the mean value between the georeferencing methods values (p ≤ 0.05). A non-parametric Wilcoxon signed-rank test was used for diffZ at Kekec, and it showed that there was a statistically significant difference between the median values of georeferencing methods (p ≤ 0.05).
3.4. Spatial Distribution of X, Y and Z Differences
To observe the spatial pattern of the differences for individual coordinates, they were plotted for each VP and for all photogrammetric products produced (i.e., BBA, orthomosaics, and DSM). All plots (
Figure 9 and
Figure 10) include the marked outlines of the rockfall areas.
Figure 9 shows the spatial distribution of the difference values diffX, diffY and diffZ of respectively BBA_traditional and BBA_PPK methods. When observing the results of BBA_traditional, those differences appear to be randomly distributed through the rockfall areas, except for Krnica where larger diffX and diffY are concentrated in the central part of the rockfall area. BBA_PPK results show that at Krnica diffZ expressed larger differences in the southeastern part of the rockfall site, whereas, at the Mangart site, there was a systematic increase of diffX and diffY in towards the northwestern part and towards the southwestern part of the rockfall for the diffZ, which also had the largest values.
The results for the orthomosaics produced by BBA_traditional (
Figure 10, X and Y coordinates) showed similarity to the BBA accuracy assessment for X and Y coordinates. The spatial pattern and the difference degree were both similar for all rockfalls. For the orthomosaics produced by the BBA_PPK method, no spatial pattern was recognized for Kekec and Krnica, as they varied across the whole rockfall sites. At the Mangart location, larger differences can be recognized towards the northwestern part of the rockfall site.
As for the DSM result for BBA_traditional (
Figure 10, Z coordinate), Krnica rockfall was the only one that had larger differences in the central part of the rockfall while, for the other two, the spatial pattern of the differences could not be recognized. On the other hand, a systematic increase of differences for the DSM produced by BBA_PPK is present for Mangart, where the differences had larger values in the southwestern part of the rockfall site. The Kekec rockfall had larger differences in the central part of the rockfall, while differences are larger when moving in the southeastern direction at Krnica.
Observing the spatial distribution of the differences in X, Y and Z coordinate between BBA_traditional and BBA_PPK, when assessing the accuracy of BBA, it is possible to recognize that larger differences were present at the Mangart location. For the X and Y coordinates, the differences were similar across the rockfall area but, for the Z coordinate, they increase in the southwestern direction. Kekec and Krnica had homogeneous differences across the rockfall area with only Krnica having larger differences in Z coordinate in the southeastern part of the rockfall area. Similar conclusions can be drawn for the accuracy assessment of orthomosaics, when comparing the differences in X and Y coordinates of VPs as obtained by using the BBA_traditional and BBA_PPK methods. The difference in BBA accuracy assessment is with the Mangart site, where differences were increasing in northwestern direction for both with X and Y coordinates. No spatial pattern could be recognized for the Kekec and Krnica rockfalls. The spatial distribution of the differences between the Z coordinate of the VPs as obtained by using the BBA_traditional and BBA_PPK methods, when assessing the accuracy of DSMs showed that, at the Kekec site, the differences were larger in the southern direction; at the Krnica site, they were larger in the southeastern direction; and, at the Mangart site, they were larger in the southwestern direction. The largest differences were observed for the Mangart site.
4. Discussion
Georeferencing of UAV-acquired images has been studied by various authors, as already summarized in the Introduction section (see the references therein) and in
Appendix A. The vertical and horizontal accuracies vary depending on several factors, including the BBA methods used, namely BBA with and without GCPs. The RMSE reported by the majority of studies varies between 0.020 and 0.060 m for horizontal accuracy, and, in the case of vertical accuracy, 0.020–0.090 m, while studies have also reported values of approximately 0.100 m up to three decimeters (in some cases, even higher).
The best accuracies in our study were achieved by the BBA_traditional method, when comparing the accuracies of BBA, orthomosaic, and DSM. The accuracies for the BBA_traditional method were, for either BBA, orthomosaic, or DSM, in the worst case, under 0.030 m for X and Y coordinates, and under 0.060 m for the Z coordinate. The BBA_PPK method generally achieved lower accuracy than the BBA_traditional method for all photogrammetric-derived products, but it must be highlighted that they were still under 0.035 m for X and Y coordinates and 0.075 m for the Z coordinate (except at the Mangart site), and, comparing the BBA_traditional with BBA_PPK, the results differed, in the worst case scenario, by 0.013 m for X and Y coordinate, and 0.036 m for the Z coordinate. The following results are in similar ranges as those reported in studies carried out by the authors mentioned in the Introduction [
25,
27,
32,
33,
36,
40,
43,
44,
45,
46,
47]. In the case of BBA_traditional, the smallest variations (diff-SD) are present at Kekec and Mangart, achieving maximum SD up to 0.010 m (X, Y, or Z coordinate) when observing assessment of the BBA. With orthomosaics the variations were larger for BBA_traditional and in some cases comparable with BBA_PPK (e.g., Kekec Y coordinate), while maximum differences were present at BBA_PPK. On the other hand, the Z coordinate always achieved the lowest diff-SD in the case of BBA_traditional, including the diff-MAX values, where the differences exceed 0.006–0.008 cm in the case of Kekec and Krnica, and 0.041 cm in the case of Mangart, when compared to BBA_PPK.
The Mangart study site was an exception compared to the other two locations, where RMSE
Z for the BBA_PPK method was larger by 0.093 m (X coordinate) and 0.111 m (Y coordinate), and 0.254 m for the Z coordinate, when observing the accuracy of BBA. The results for the orthophoto and DSM accuracies were in a similar range: 0.077–0.114 m for the X and Y coordinate and 0.231 m for Z coordinate. The major cause of such a large difference in accuracy was the unfavorable satellite position configuration [
8,
27,
29] on the day of the UAV survey (more or less three visible satellite positions in the time of survey), compared to that on the day when the GCP/VP survey was performed. Consequently, it is recommended to predict the satellite position quality [
29] before the UAV flight, both from the perspective of the final accuracy of the photogrammetric products and for the safety of the flight. Due to the extent of the UAV survey (rapidly changing weather conditions; clouds and fog), and the GNSS survey of the points, both measurements could not be performed on the same day.
Even though our study was carried out in mountainous areas with larger elevation changes along the area of interest (rockfall deposit areas), the final accuracies of BBA, orthomosaics, and DSM were in line with the values reported in other studies. The reliability of the results is therefore high, as similar results have been reported for two rockfall locations that we included in the study; however, the third location highlights that the BBA_PPK method still may—particularly in remote areas—cause larger deviations, and GCPs should be used to validate the results.
The spatial distribution of the differences between the X, Y and Z coordinates of VPs, as obtained by using BBA_traditional and BBA_PPK methods, did not reveal major spatial patterns, while outliers were located randomly across the rockfall sites. The only location that showed a distinctive spatial distribution was Mangart, and that only for the photogrammetric-derived products produced by BBA_PPK. The differences increase towards the northwestern direction for the X and Y coordinates and towards the southwestern direction for the Z coordinate. The spatial pattern was similar with all photogrammetric-derived products. The spatial distribution of the differences is a result of the lower accuracy of the BBA_PPK method, and it is not correlated with terrain topography.
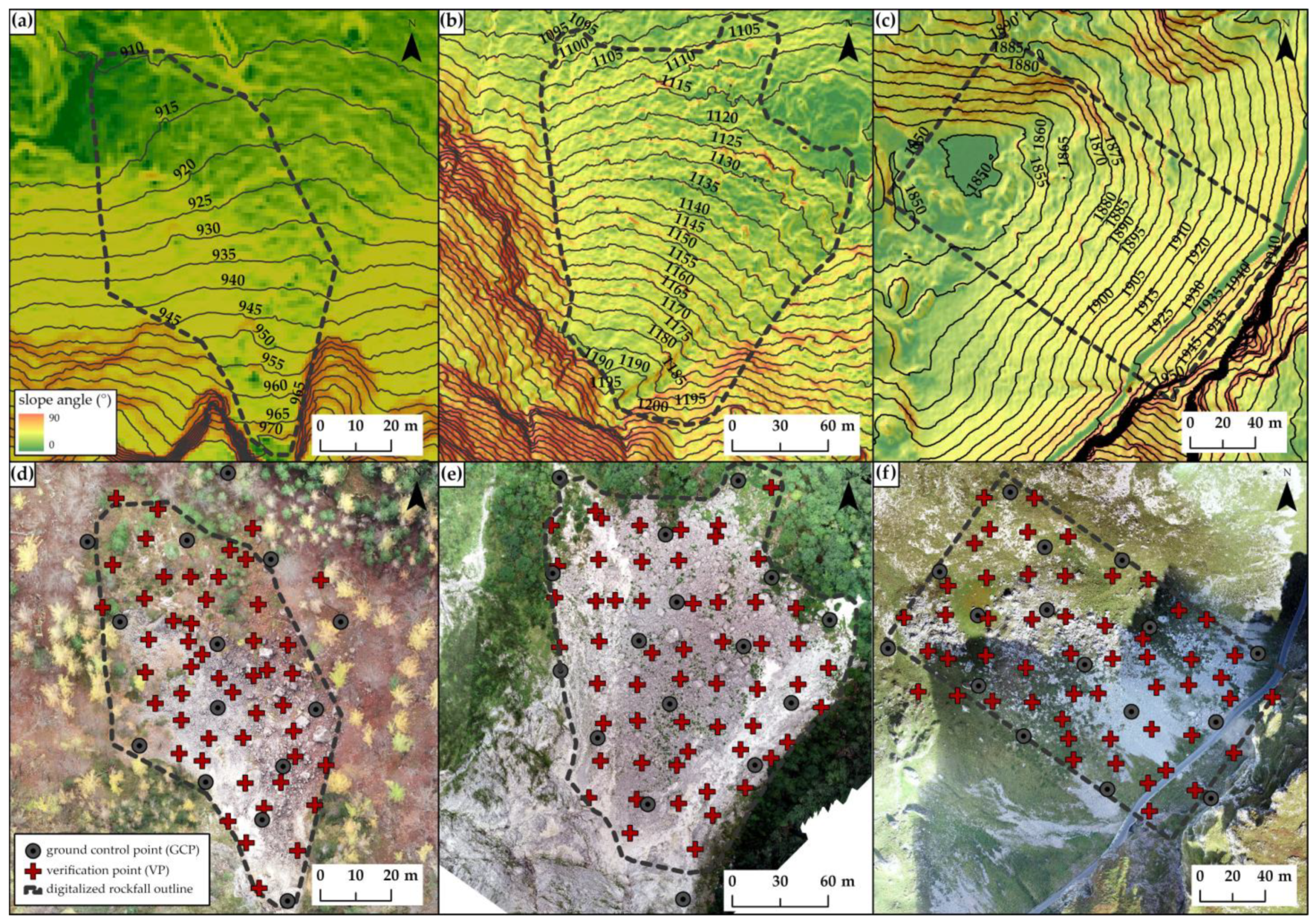
The highest differences in coordinates (X, Y and Z) of the VPs when comparing the VP and GCP locations, were achieved at the Krnica rockfall, which was also the largest area that we surveyed. In our experience, measuring the locations of GCPs and VPs can be very challenging. Under the steep rock walls, there is no signal, meaning that the points cannot be measured with GNSS that has RTK; in such cases, the use of the total station is then needed. Additional challenge presented at this study site was moving the measurement equipment, and in the end measurement of the GCPs/VPs. Namely, not all GCPs/VPs could be measured with the total station from one standing position, since the area was too large. Consequently, the total station was positioned on several locations, and due to the large area that needed to be surveyed, not all measurements could be performed in one day. Moreover, due to the high surface roughness, there were many obstacles (rock deposits that are a few meters of high) that obstructed the measurements with total station, and the GCPs/VPs were in some cases located on scree slope (as there was no other option), meaning that they were not attached firmly to the ground. In latter case, targets were more unstable, and could be moved by simple slope processes or simply by walking past it. Consequently, all this factors could potentially influence the measurements, and result in higher errors at this rockfall site. The RMSE values of the BBA_traditional method were larger at the Krnica rockfall, compared to the other two locations, and comparable with the results of the BBA_PPK method. This was partially confirmed by a non-parametric Wilcoxon signed-rank test that showed that there were no statistically significant differences between the georeferencing methods for Y coordinate when assessing the accuracy of the BBA. However, in the assessment of other photogrammetric-derived products and coordinates, the differences were statistically significant between the georeferencing methods.
Taking into consideration this factor, BBA_PPK definitely represents a viable possibility and solution for application in such challenging terrains. Still, for generating products with high accuracy (if possible)—especially vertical accuracy—BBA_PPK should be used at least in combination with few GCPs and possible interferences or obstructions that can influence the final results. Benassi et al. [
32] have reported that, by using at least one GCP point, the accuracy can be almost as good as with the use of GCPs for horizontal accuracy, and only slightly worse for vertical accuracy. The fact is that the accuracy can be significantly enhanced with the use of a UAV with PPK, especially when the GCPs cannot be properly distributed and measured in the hazardous areas [
27,
29,
43,
47,
59,
67]. To improve the vertical accuracy, Štroner et al. [
47] proposed the use of duplicate flights (double-grid) and geometrically different combinations (different altitudes and camera angle of images); similar conclusions were drawn by Wiącek and Pyka [
33]. Harwin et al. [
68] concluded that including oblique images is advised, as they can improve self-calibration of the bundle block adjustment and increase horizontal and vertical accuracy. Similar findings were presented by Kyriou et al. [
62]; they stated that the combination of nadir and oblique imagery can effectively be used for geomorphological mapping in areas with complex topography and steep slope (>60°), to increase the geometric accuracy of UAV data.
Accuracies of PPK solution up to 0.100 cm should provide a satisfactory photogrammetric-derived product at a representational scale [
28,
31,
33,
39]. Teppati Losè et al. [
31] mentioned the use of BBA approaches without GCPs at the scale of 1:500. Przybilla and Bäumker [
69] proposed to use RTK/PPK, depending on the application intended for the results. For topography mapping, where the accuracy range is between 0.010 and 0.020 m, they proposed the use of RTK/PPK; with cadaster mapping having an accuracy range between 0.010 and 0.030 m, they proposed the use of RTK/PPK with the GCPs; and, for engineering surveying (accuracy range 0.010 m), the use of GCPs was recommended. Padró et al. [
37] stated that the PPK method is consistent enough in generating a large-scale mapping with less effort than the GCP method, and that highly detailed maps (spatial resolution <0.05 m) can be achieved. Tomaštík et al. [
28] concluded that the BBA_PPK method can provide an optimal solution for mapping in remote areas.
Based on the results of our study, we can come to similar conclusions. Regarding the use of BBA_traditional or BBA_PPK, the decision regarding the georeferencing method must follow the accuracy requirements of data application and the scale needed, and the conditions for a safely conducting of the field survey. In the event of extreme rockfall events, where rockfall activity is high and the conditions for field work are not safe, we would recommend using the BBA_PPK method only. When the results will be used at a regional level (decimeter accuracy), such as for rockfall mapping of release areas, or the modeling of potential rockfall propagation and deposit areas, the use of the BBA_PPK method could prove to be satisfactory (achieving horizontal accuracies around 0.040 m and vertical up to 0.080 m). On the other hand, when the results of the rockfall modeling are to be used for the planning of the technical protection measures, additional GCPs should be included, to increase the accuracy of the results (up to 0.010–0.020 m) and their reliability. To find an optimal ratio between the accuracy of the photogrammetric products, the work load related to georeferencing and, most importantly, the safety of the field operations, we will continue our research by finding an optimal combination of BBA_traditional and BBA_PPK methods. The following research will, therefore, investigate the number of GCPs needed besides the BBA_PPK method, and the importance of the location where they are situated, especially taking into consideration that they are not located on the exposed and hazardous areas.
5. Conclusions
The use of UAV platforms equipped with GNSS receivers that provide georeferencing without the use of GCPs is desirable when mapping large and dangerous areas, such as active rockfall areas, as there is no need to use GCPs, as with indirect georeferencing. In this study, we only tested the use of only the georeferencing of the bundle block adjustment (BBA) with PPK method, in comparison to the use of georeferencing of the BBA with GCPs, to see if it is possible to produce high-accuracy photogrammetric products in the case of rockfalls. The main motivation of the study was to improve the condition for field surveying of GCPs, which is labor-intensive, time-consuming, and, most importantly, dangerous. In the majority of cases, the accuracy of the X, Y and Z coordinates, in the case of the georeferencing of the BBA with the PPK method, did not exceed 0.050 m; in the case of orthomosaic, the accuracy of the X and Y coordinates did not exceed 0.034 m; and in case of DSM, the accuracy of the Z coordinate did not exceed 0.072 m. At one location, the results of georeferencing of the BBA with the PPK method were not comparable to those of georeferencing of the BBA with GCPs for all photogrammetric products, which was mostly due to the satellite configuration on the day of the UAV survey with the BBA_PPK method.
We can conclude that the georeferencing of the BBA with the PPK method can provide high-accuracy products, presenting a viable alternative to the georeferencing of the BBA with GCPs. The decision regarding the use of the georeferencing method must be in line with the purpose of the final results; for example, in the regional modeling of rockfalls, at decimeter accuracy, the BBA georeferencing with the PPK method may be satisfactory, while the planning of technical protection measures with rockfalls, at centimeter accuracy, may require the use of GCPs. The PPK method presents a safer option for mapping in mountainous areas. To improve the accuracy of the BBA georeferencing with the PPK method (i.e., to centimeter accuracy), further analyses will be conducted, in combination with a smaller number of GCPs at certain locations in rockfall areas.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









