
Building Extraction from Airborne LiDAR Data Based on Multi-Constraints Graph Segmentation



Abstract
:
1. Introduction
1.1. Related Works
1.2. Motivation
- The point-based building extraction methods generally involve high computation costs. Thus, it is difficult to process a large amount of LiDAR points.
- When encountering with different building environments, the performance of the methods generally varies greatly. The robustness of the building extraction methods is not good.
- The vegetation points adjacent to buildings are easily misclassified as building points, which results in low correctness of building extraction.
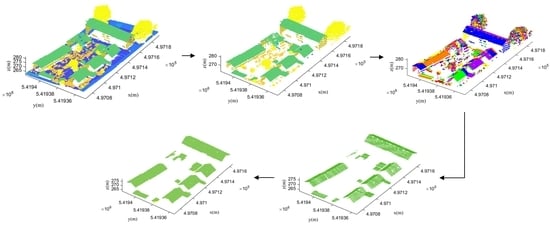
2. Methodology
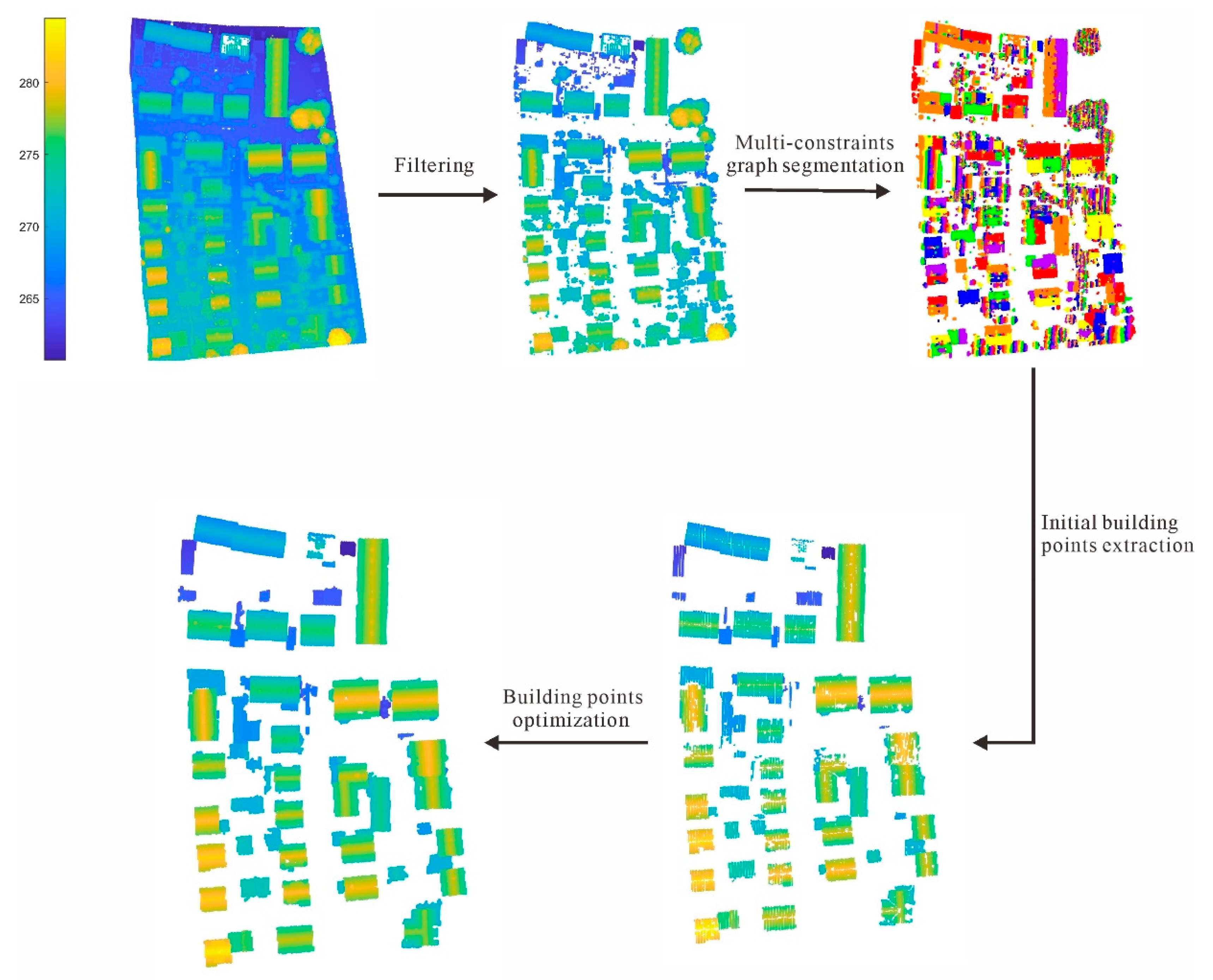
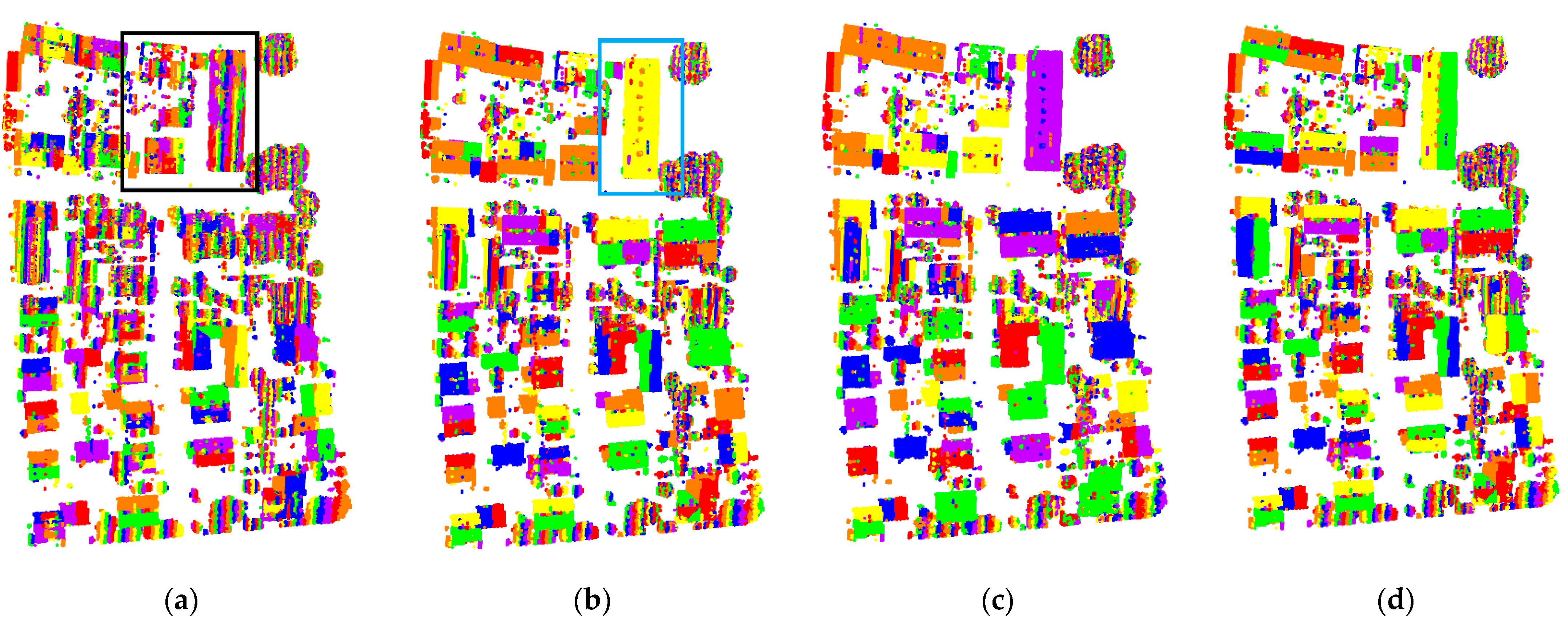
2.1. Multi-Constraints Graph Segmentation
2.2. Initial Building Points Extraction Based on Spatial Geometric Features
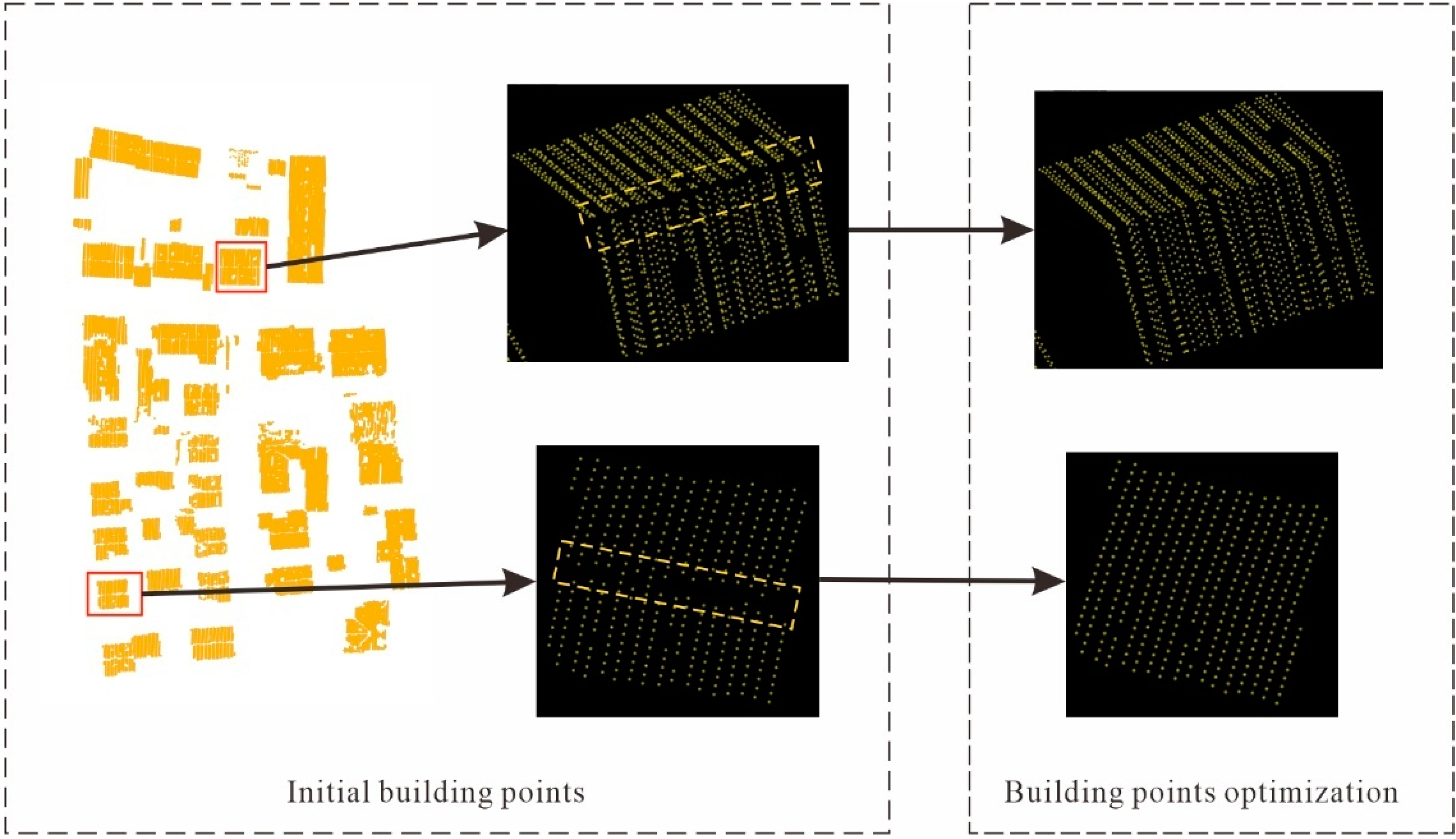
2.3. Building Points Optimization Based on Multi-Scale Progressive Growing
| Algorithm 1. Building points optimization based on multi-scale progressive growing. | |
| Input: | Initial building points: |
| is a random point, is the building point set, is the complementary set, which represents a non-building point set. | |
| Scale sets: , | |
| for iter = 1 to K | |
| s = siter | |
| for i = 1 to N | |
| if | |
| Find the neighboring point set of under the scale of s: | |
| for j = 1 to M | |
| if | |
| Calculate the distance () between and the fitting plane of the object primitives where is | |
| Calculate the angle () between the normal vector of and | |
| if | |
| Update building point set and non-building point set | |
| end | |
| Output: | Building points set U |
3. Experimental Results and Analysis
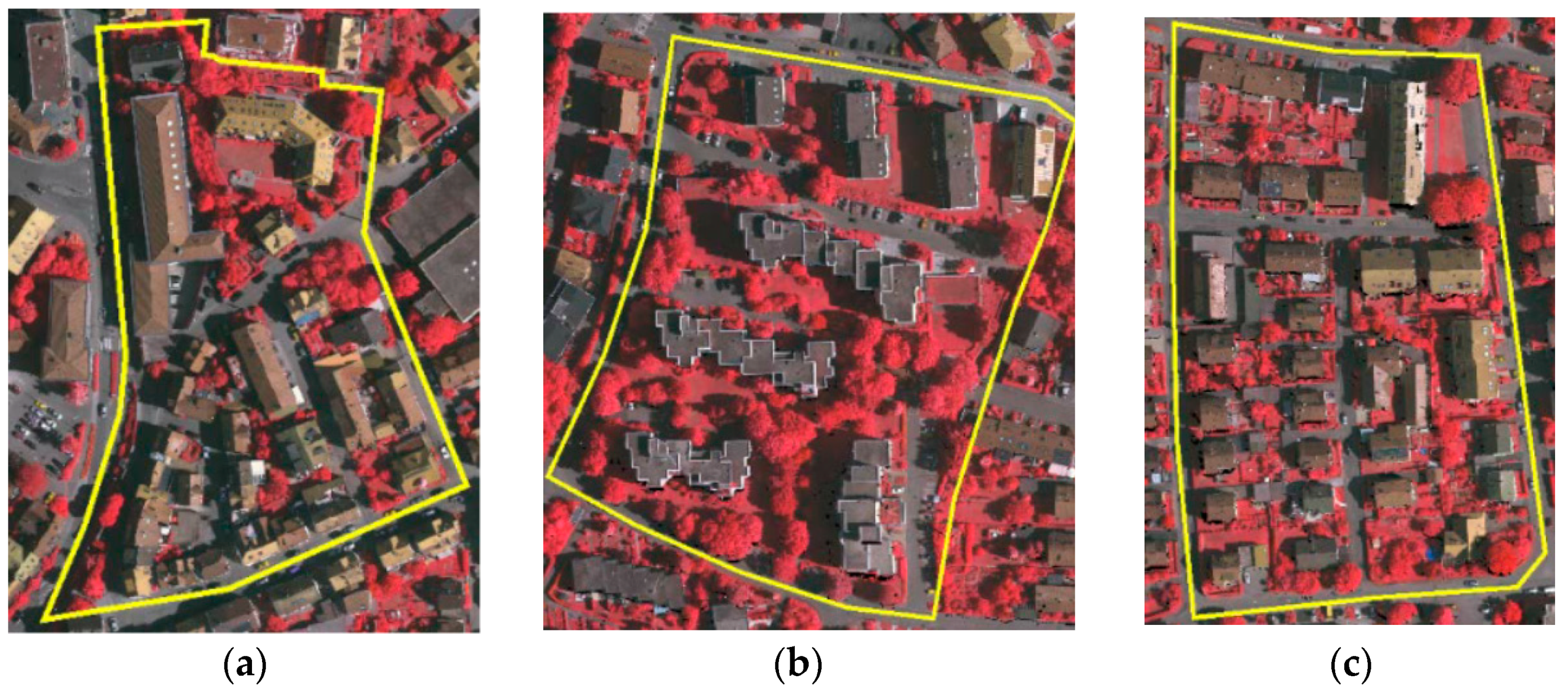
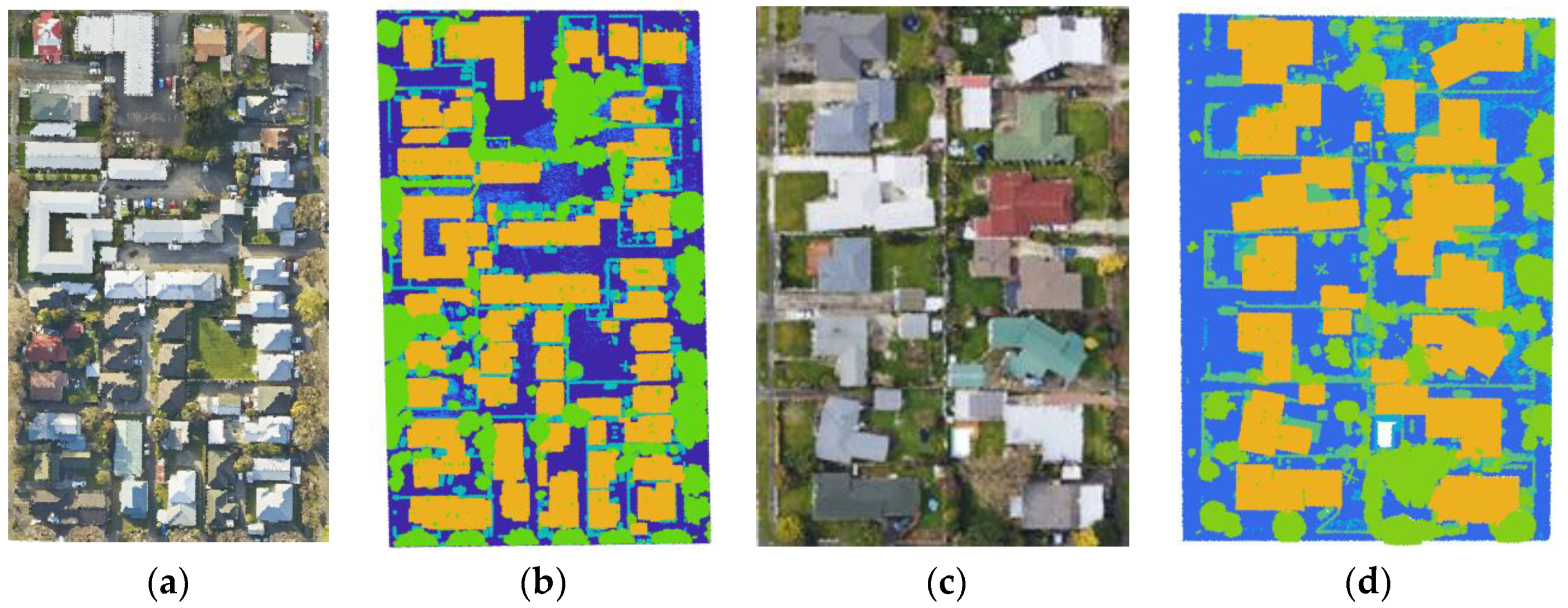
3.1. Experimental Datasets
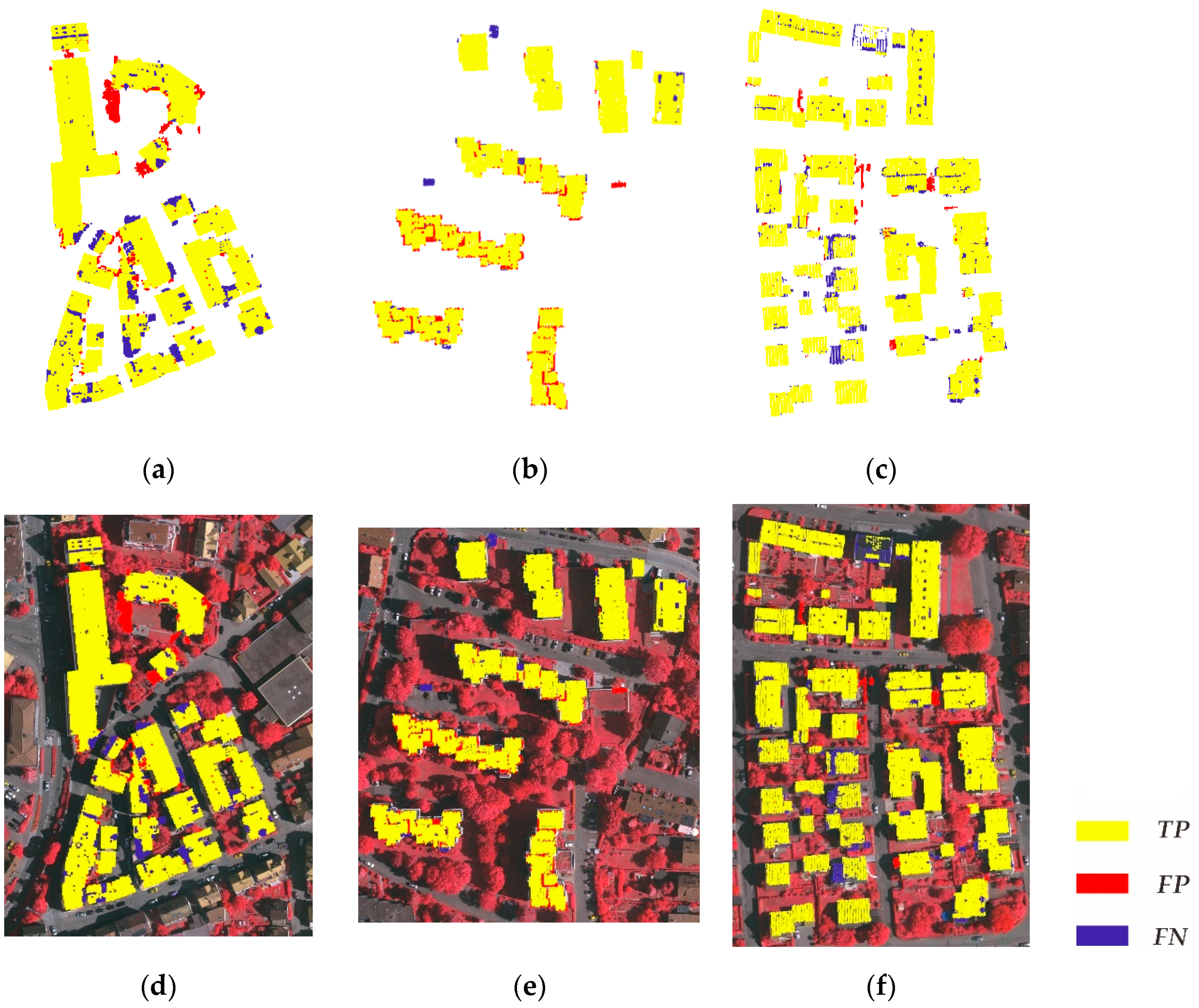
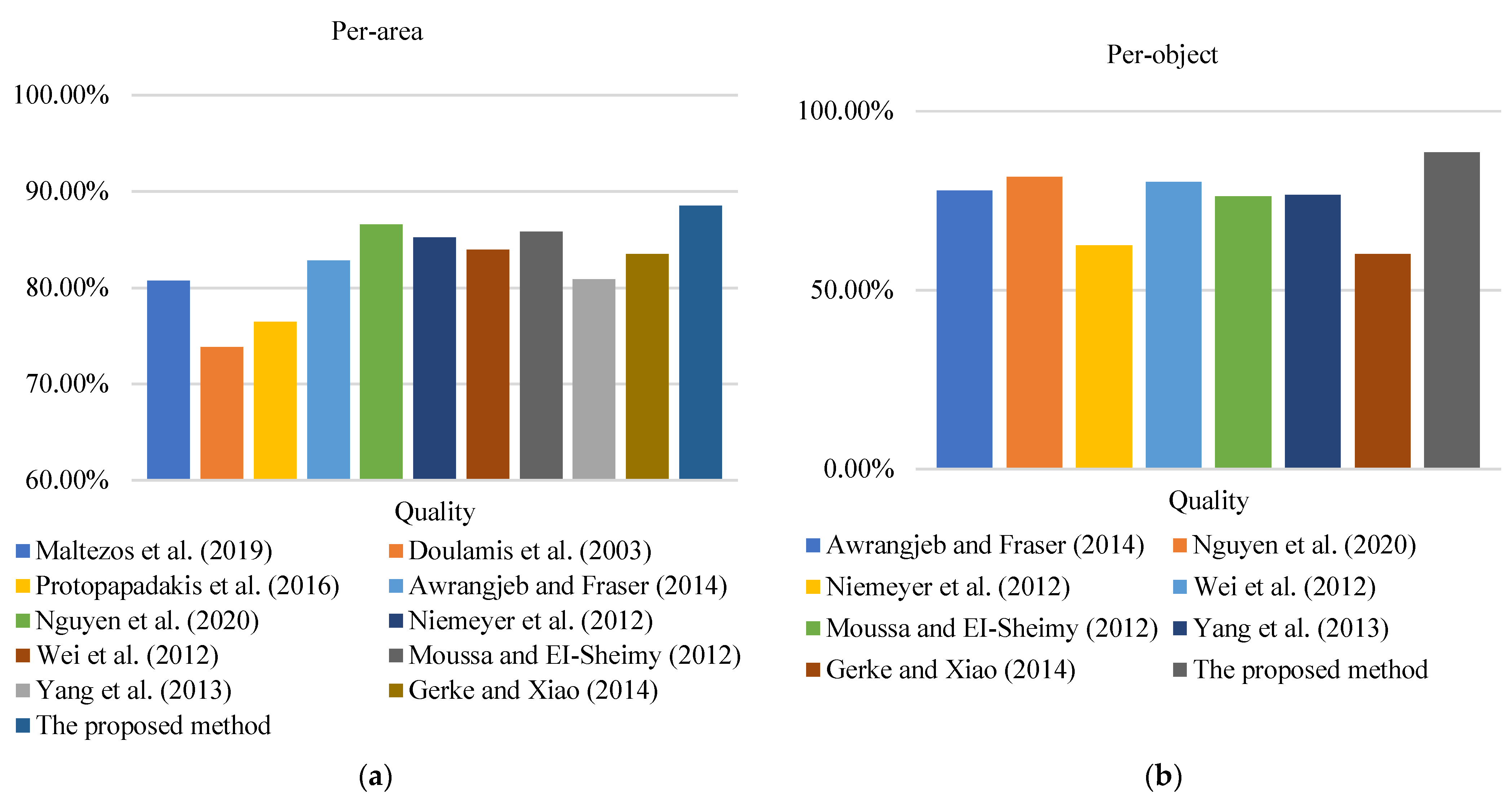
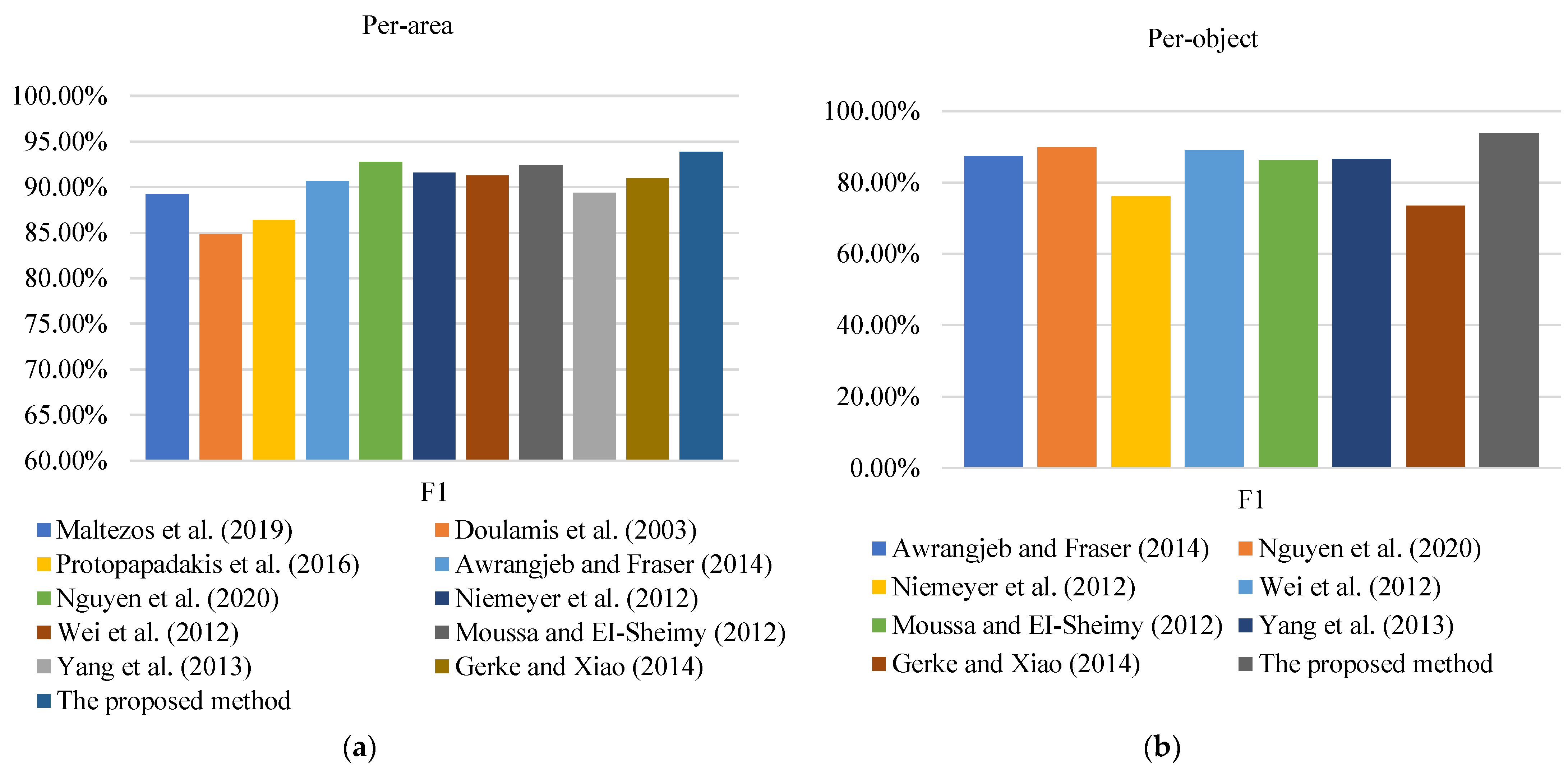
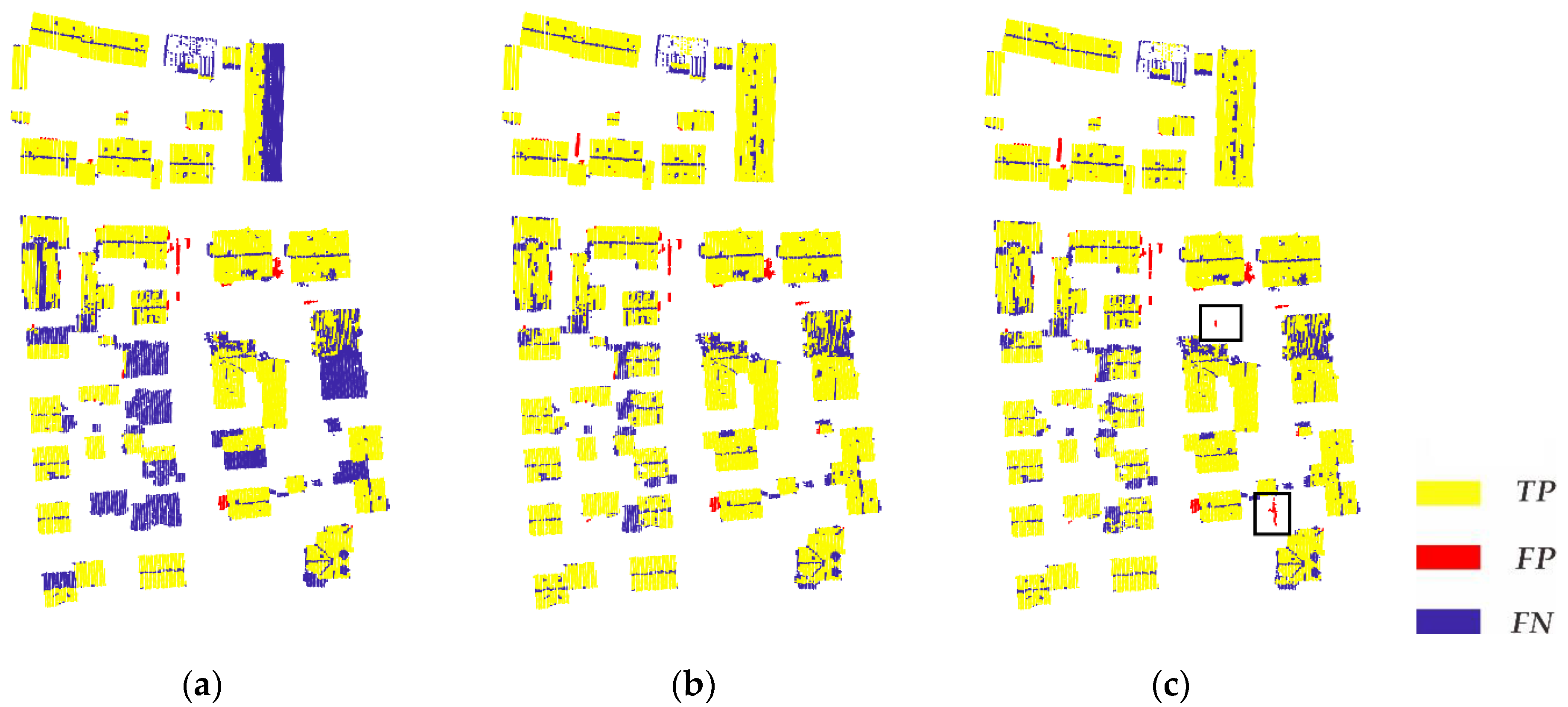
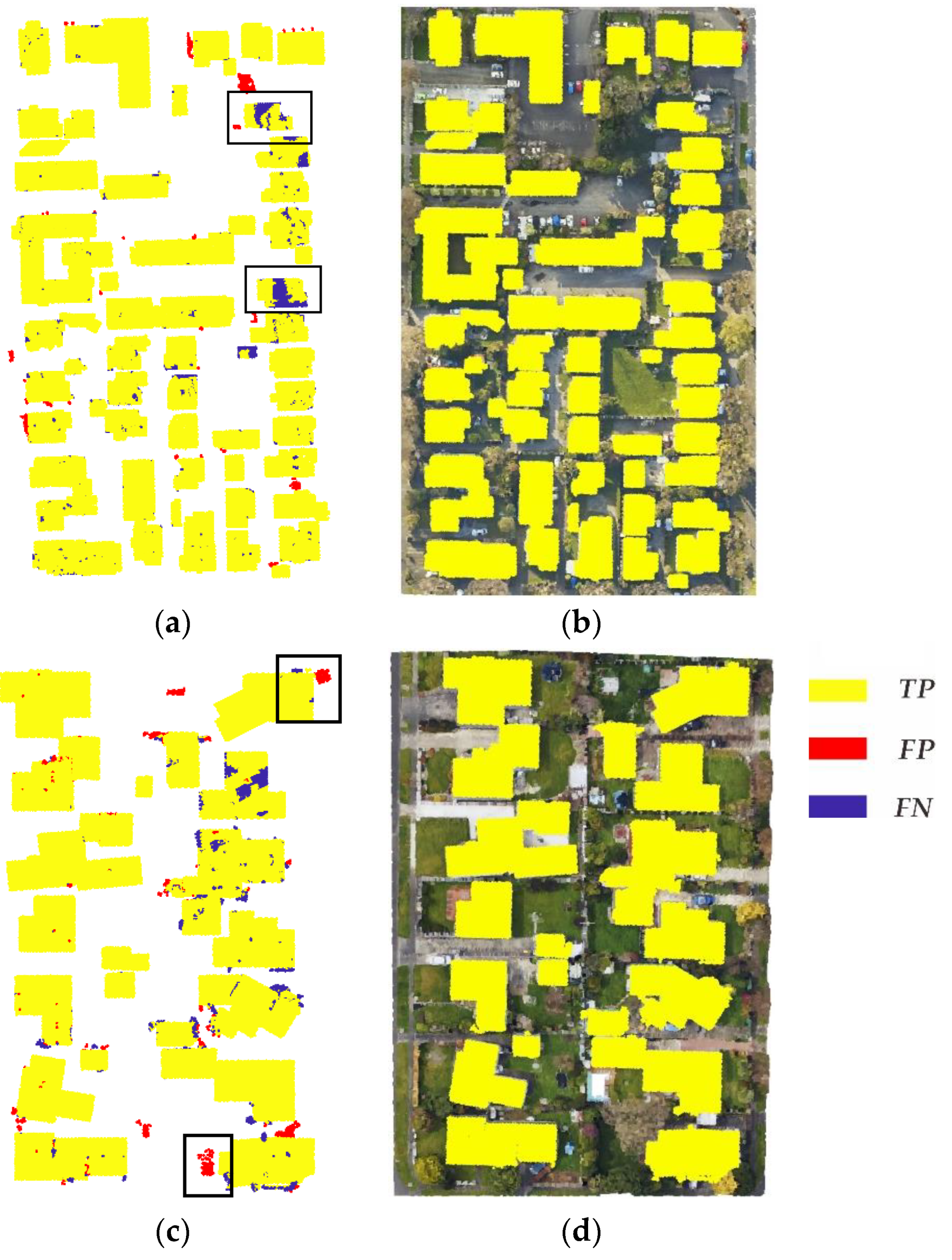
3.2. Experimental Results and Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Du, S.; Zhang, Y.; Zou, Z.; Xu, S.; He, X.; Chen, S. Automatic building extraction from LiDAR data fusion of point and grid-based features. ISPRS J. Photogramm. Remote Sens. 2017, 130, 294–307. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L. Morphological building/shadow index for building extraction from high-resolution imagery over urban areas. IEEE J. -STARS 2012, 5, 161–172. [Google Scholar] [CrossRef]
- Toth, C.; Jozkow, G. Remote sensing platforms and sensors: A survey. ISPRS J. Photogramm. Remote Sens. 2016, 115, 22–36. [Google Scholar] [CrossRef]
- Luo, L.; Wang, X.; Guo, H.; Lasaponara, R.; Zong, X.; Masini, N.; Wang, G.; Shi, P.; Khatteli, H.; Chen, F.; et al. Airborne and spaceborne remote sensing for archaeological and cultural heritage applications: A review of the century (1907–2017). Remote Sens. Environ. 2019, 232, 111280. [Google Scholar] [CrossRef]
- Tarsha Kurdi, F.; Awrangjeb, M.; Munir, N. Automatic filtering and 2D modeling of airborne laser scanning building point cloud. Trans. GIS 2021, 25, 164–188. [Google Scholar] [CrossRef]
- Wen, C.; Li, X.; Yao, X.; Peng, L.; Chi, T. Airborne LiDAR point cloud classification with global-local graph attention convolution neural network. ISPRS J. Photogramm. Remote Sens. 2021, 173, 181–194. [Google Scholar] [CrossRef]
- Zhang, P.; Du, P.; Lin, C.; Wang, X.; Li, E.; Xue, Z.; Bai, X. A hybrid attention-aware fusion network (HAFNET) for building extraction from high-resolution imagery and LiDAR data. Remote Sens. 2020, 12, 3764. [Google Scholar] [CrossRef]
- Liu, K.; Ma, H.; Ma, H.; Cai, Z.; Zhang, L. Building extraction from airborne LiDAR data based on min-cut and improved post-processing. Remote Sens. 2020, 12, 2849. [Google Scholar] [CrossRef]
- He, Y.; Xu, G.; Kaufmann, H.; Wang, J.; Ma, H.; Liu, T. Integration of InSAR and LiDAR technologies for a detailed urban subsidence and hazard assessment in Shenzhen, China. Remote Sens. 2021, 13, 2366. [Google Scholar] [CrossRef]
- Zhou, Z.; Gong, J. Automated residential building detection from airborne LiDAR data with deep neural networks. Adv. Eng. Inform. 2018, 36, 229–241. [Google Scholar] [CrossRef]
- Maltezos, E.; Doulamis, A.; Doulamis, N.; Ioannidis, C. Building extraction from LiDAR data applying deep convolutional neural networks. IEEE Geosci. Remote Sens. 2019, 16, 155–159. [Google Scholar] [CrossRef]
- Ni, H.; Lin, X.; Zhang, J. Classification of ALS point cloud with improved point cloud segmentation and random forests. Remote Sens. 2017, 9, 288. [Google Scholar] [CrossRef] [Green Version]
- Nahhas, F.H.; Shafri, H.Z.M.; Sameen, M.I.; Pradhan, B.; Mansor, S. Deep learning approach for building detection using LiDAR–orthophoto fusion. J. Sens. 2018, 2018, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Zhang, X.; Xin, Q.; Sun, Y.; Zhang, P. Automatic building extraction from high-resolution aerial images and LiDAR data using gated residual refinement network. ISPRS J. Photogramm. Remote Sens. 2019, 151, 91–105. [Google Scholar] [CrossRef]
- Li, D.; Shen, X.; Yu, Y.; Guan, H.; Li, J.; Zhang, G.; Li, D. Building extraction from airborne multi-spectral LiDAR point clouds based on graph geometric moments convolutional neural networks. Remote Sens. 2020, 12, 3186. [Google Scholar] [CrossRef]
- Yuan, Q.; Shafri, H.Z.M.; Alias, A.H.; Hashim, S.J.B. Multiscale semantic feature optimization and fusion network for building extraction using high-resolution aerial images and LiDAR data. Remote Sens. 2021, 13, 2473. [Google Scholar] [CrossRef]
- Zolanvari, S.M.I.; Ruano, S.; Rana, A.; Cummins, A.; Da Silva, R.E.; Rahbar, M.; Smolic, A. DublinCity: Annotated LiDAR point cloud and its applications. BMVC 30th British Machine Vision Conference, Cardiff, UK, 9 September 2019. [Google Scholar]
- Costantino, D.; Angelini, M.G. Features and ground automatic extraction from airborne LiDAR data. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 19–24. [Google Scholar] [CrossRef] [Green Version]
- Crosilla, F.; Macorig, D.; Scaioni, M.; Sebastianutti, I.; Visintini, D. LiDAR data filtering and classification by skewness and kurtosis iterative analysis of multiple point cloud data categories. Appl. Geogr. 2013, 5, 225–240. [Google Scholar] [CrossRef] [Green Version]
- Ywata, M.S.Y.; Dal Poz, A.P.; Shimabukuro, M.H.; de Oliveira, H.C. Snake-based model for automatic roof boundary extraction in the object space integrating a high-resolution aerial images stereo pair and 3D roof models. Remote Sens. 2021, 13, 1429. [Google Scholar] [CrossRef]
- Dorninger, P.; Pfeifer, N. A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds. Sensors 2008, 8, 7323–7343. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Poullis, C.; You, S. Photorealistic large-scale urban city model reconstruction. IEEE Trans. Vis. Comput. Graph. 2009, 15, 654–669. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Salvaggio, C. Aerial 3D building detection and modeling from airborne LiDAR point clouds. IEEE J. -STARS 2013, 6, 1440–1449. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Fraser, C. Automatic segmentation of raw LIDAR data for extraction of building roofs. Remote Sens. 2014, 6, 3716–3751. [Google Scholar] [CrossRef] [Green Version]
- Fan, H.; Yao, W.; Fu, Q. Segmentation of sloped roofs from airborne LiDAR point clouds using ridge-based hierarchical decomposition. Remote Sens. 2014, 6, 3284–3301. [Google Scholar] [CrossRef] [Green Version]
- Ural, S.; Shan, J. A min-cut based filter for airborne LiDAR data. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 49, 395–401. [Google Scholar] [CrossRef] [Green Version]
- Zou, X.; Feng, Y.; Li, H.; Zhu, J. An adaptive strips method for extraction buildings from light detection and ranging data. IEEE Trans. Geosci. Remote Sens. 2017, 14, 1651–1655. [Google Scholar] [CrossRef]
- Cai, Z.; Ma, H.; Zhang, L. A building detection method based on semi-suppressed fuzzy c-means and restricted region growing using airborne LiDAR. Remote Sens. 2019, 11, 848. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Jiang, T.; Yu, M.; Tao, S.; Sun, J.; Liu, S. Semantic-based building extraction from LiDAR point clouds using contexts and optimization in complex environment. Sensors 2020, 20, 3386. [Google Scholar] [CrossRef]
- Vosselman, G.; Maas, H. Airborne and Terrestrial Laser Scanning; Whittles Publishing: Dunbeath, UK, 2014. [Google Scholar]
- Zhou, G.; Zhou, X. Seamless fusion of LiDAR and aerial imagery for building extraction. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7393–7407. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Zhang, C.; Fraser, C.S. Automatic reconstruction of building roofs through effective integration of LiDAR and multispectral imagery. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 203–208. [Google Scholar] [CrossRef] [Green Version]
- Awrangjeb, M.; Zhang, C.; Fraser, C.S. Automatic extraction of building roofs using LiDAR data and multispectral imagery. ISPRS J. Photogramm. Remote Sens. 2013, 83, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Qin, R.; Fang, W. A hierarchical building detection method for very high resolution remotely sensed images combined with DSM using graph cut optimization. Photogramm. Eng. Remote Sens. 2014, 80, 873–883. [Google Scholar] [CrossRef]
- Gilani, S.; Awrangjeb, M.; Lu, G. An automatic building extraction and regularisation technique using LiDAR point cloud data and orthoimage. Remote Sens. 2016, 8, 258. [Google Scholar] [CrossRef] [Green Version]
- Siddiqui, F.; Teng, S.; Awrangjeb, M.; Lu, G. A robust gradient based method for building extraction from LiDAR and photogrammetric imagery. Sensors 2016, 16, 1110. [Google Scholar] [CrossRef] [Green Version]
- Lai, X.; Yang, J.; Li, Y.; Wang, M. A building extraction approach based on the fusion of LiDAR point cloud and elevation map texture features. Remote Sens. 2019, 11, 1636. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Shi, W.; Zhou, M.; Min, Z.; Chen, P. Automatic building extraction via adaptive iterative segmentation with LiDAR data and high spatial resolution imagery fusion. IEEE J. -STARS 2020, 13, 2081–2095. [Google Scholar] [CrossRef]
- Chen, J.; Qiu, X.; Ding, C.; Wu, Y. CVCMFF net: Complex-valued convolutional and multifeature fusion network for building semantic segmentation of InSAR images. IEEE Trans. Geosci. Remote Sens. 2021, 1–14. [Google Scholar] [CrossRef]
- Pan, S.; Guan, H.; Yu, Y.; Li, J.; Peng, D. A comparative land-cover classification feature study of learning algorithms: DBM, PCA, and RF using multispectral LiDAR data. IEEE J. -STARS 2019, 12, 1314–1326. [Google Scholar] [CrossRef]
- Hui, Z.; Hu, Y.; Yevenyo, Y.Z.; Yu, X. An improved morphological algorithm for filtering airborne LiDAR point cloud based on multi-level kriging interpolation. Remote Sens. 2016, 8, 35. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Takoudjou, S.M.; Casella, E. LeWoS: A universal leaf-wood classification method to facilitate the 3D modelling of large tropical trees using terrestrial LiDAR. Methods Ecol. Evol. 2020, 11, 376–389. [Google Scholar] [CrossRef]
- ISPRS Test Project on Urban Classification, 3D Building Reconstruction and Semantic Labeling. Available online: https://www2.isprs.org/commissions/comm2/wg4/benchmark/ (accessed on 22 July 2021).
- Rutzinger, M.; Rottensteiner, F.; Pfeifer, N. A comparison of evaluation techniques for building extraction from airborne laser scanning. IEEE J. -STARS 2009, 2, 11–20. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Daniel, S.; Guériot, D.; Sintès, C.; Le Caillec, J. Super-resolution-based snake model—an unsupervised method for large-scale building extraction using airborne LiDAR data and optical image. Remote Sens. 2020, 12, 1702. [Google Scholar] [CrossRef]
- Doulamis, A.D.; Doulamis, N.D.; Kollias, S.D. An adaptable neural-network model for recursive nonlinear traffic prediction and modeling of MPEG video sources. IEEE Trans. Neural Netw. 2003, 14, 150–166. [Google Scholar] [CrossRef]
- Protopapadakis, E.; Schauer, M.; Pierri, E.; Doulamis, A.D.; Stavroulakis, G.E.; Böhrnsen, J.U.; Langer, S. A genetically optimized neural classifier applied to numerical pile integrity tests considering concrete piles. Comput. Struct. 2016, 162, 68–79. [Google Scholar] [CrossRef]
- Niemeyer, J.; Rottensteiner, F.; Soergel, U. Conditional random fields for LiDAR point cloud classification in complex urban areas. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 263–268. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.; Yao, W.; Wu, J.; Schmitt, M.; Stilla, U. Adaboost-based feature relevance assessment in fusing LiDAR and image data for classification of trees and vehicles in urban scenes. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 323–328. [Google Scholar] [CrossRef] [Green Version]
- Moussa, A.; El-Sheimy, N. A new object based method for automated extraction of urban objects from airborne sensors data. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 309–314. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Xu, W.; Dong, Z. Automated extraction of building outlines from airborne laser scanning point clouds. IEEE Geosci. Remote Sens. 2013, 10, 1399–1403. [Google Scholar] [CrossRef]
- Gerke, M.; Xiao, J. Fusion of airborne laserscanning point clouds and images for supervised and unsupervised scene classification. Isprs J. Photogramm. Remote Sens. 2014, 87, 78–92. [Google Scholar] [CrossRef]
- Demantké, J.; Mallet, C.; David, N.; Vallet, B. Dimensionality based scale selection in 3D LiDAR point clouds. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 3812, 97–102. [Google Scholar] [CrossRef] [Green Version]
- OpenTopography. Available online: https://portal.opentopography.org (accessed on 22 July 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Per-Area (%) | Per-Object (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Comp | Corr | Quality | F1 | Comp | Corr | Quality | F1 | ||
| Area1 | Maltezos et al. (2019) | 79.80 | 91.50 | 74.40 | 85.25 | × | × | × | × |
| Doulamis et al. (2003) | 68.80 | 94.00 | 65.90 | 79.45 | × | × | × | × | |
| Protopapadakis et al. (2016) | 92.20 | 68.00 | 64.30 | 78.27 | × | × | × | × | |
| Awrangjeb and Fraser (2014) | 92.70 | 88.70 | 82.90 | 90.66 | 83.80 | 96.90 | 81.61 | 89.88 | |
| Nguyen et al. (2020) | 90.42 | 94.20 | 85.65 | 92.27 | 83.78 | 100.00 | 83.78 | 91.17 | |
| Niemeyer et al. (2012) | 87.00 | 90.10 | 79.40 | 88.52 | 83.80 | 75.60 | 65.96 | 79.49 | |
| Wei et al. (2012) | 89.80 | 92.20 | 83.46 | 90.98 | 89.20 | 97.10 | 86.89 | 92.98 | |
| Moussa and EI-Sheimy (2012) | 89.10 | 94.70 | 84.87 | 91.81 | 83.80 | 100.00 | 83.80 | 91.19 | |
| Yang et al. (2013) | 87.90 | 91.20 | 81.03 | 89.52 | 81.10 | 96.80 | 78.98 | 88.26 | |
| Gerke and Xiao (2014) | 91.20 | 90.30 | 83.06 | 90.75 | 86.50 | 91.40 | 79.99 | 88.88 | |
| The proposed method | 93.04 | 91.61 | 85.74 | 92.32 | 97.22 | 90.34 | 88.07 | 93.65 | |
| Methods | Per-Area (%) | Per-Object (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Comp | Corr | Quality | F1 | Comp | Corr | Quality | F1 | ||
| Area2 | Maltezos et al. (2019) | 87.70 | 96.00 | 84.60 | 91.66 | × | × | × | × |
| Doulamis et al. (2003) | 83.10 | 92.30 | 77.60 | 87.46 | × | × | × | × | |
| Protopapadakis et al. (2016) | 90.80 | 90.50 | 82.90 | 90.65 | × | × | × | × | |
| Awrangjeb and Fraser (2014) | 91.50 | 91.00 | 83.90 | 91.25 | 85.70 | 84.60 | 74.20 | 85.15 | |
| Nguyen et al. (2020) | 93.47 | 94.75 | 88.87 | 94.11 | 78.57 | 100.00 | 78.57 | 88.00 | |
| Niemeyer et al. (2012) | 93.80 | 91.40 | 86.19 | 92.58 | 78.60 | 52.40 | 45.86 | 62.88 | |
| Wei et al. (2012) | 92.50 | 93.90 | 87.26 | 93.19 | 78.60 | 100.00 | 78.60 | 88.02 | |
| Moussa and EI-Sheimy (2012) | 93.20 | 95.40 | 89.19 | 94.29 | 78.60 | 100.00 | 78.60 | 88.02 | |
| Yang et al. (2013) | 88.80 | 94.00 | 84.04 | 91.33 | 78.60 | 100.00 | 78.60 | 88.02 | |
| Gerke and Xiao (2014) | 94.00 | 89.00 | 84.22 | 91.43 | 78.60 | 42.30 | 37.93 | 55.00 | |
| The proposed method | 96.86 | 92.93 | 90.21 | 94.85 | 93.33 | 96.55 | 90.32 | 94.91 | |
| Methods | Per-Area (%) | Per-Object (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Comp | Corr | Quality | F1 | Comp | Corr | Quality | F1 | ||
| Area3 | Maltezos et al. (2019) | 88.20 | 93.70 | 83.20 | 90.87 | × | × | × | × |
| Doulamis et al. (2003) | 82.90 | 92.90 | 78.00 | 87.62 | × | × | × | × | |
| Protopapadakis et al. (2016) | 96.70 | 84.50 | 82.20 | 90.19 | × | × | × | × | |
| Awrangjeb and Fraser (2014) | 93.90 | 86.30 | 81.70 | 89.94 | 78.60 | 97.80 | 77.23 | 87.16 | |
| Nguyen et al. (2020) | 91.00 | 93.02 | 85.18 | 92.00 | 83.93 | 97.92 | 82.46 | 90.39 | |
| Niemeyer et al. (2012) | 93.80 | 93.70 | 88.24 | 93.75 | 82.10 | 90.20 | 75.38 | 85.96 | |
| Wei et al. (2012) | 86.80 | 92.50 | 81.09 | 89.56 | 75.00 | 100.00 | 75.00 | 85.71 | |
| Moussa and EI-Sheimy (2012) | 87.00 | 95.20 | 83.34 | 90.92 | 66.10 | 100.00 | 66.10 | 79.59 | |
| Yang et al. (2013) | 85.20 | 89.50 | 77.46 | 87.30 | 73.20 | 97.60 | 71.91 | 83.66 | |
| Gerke and Xiao (2014) | 89.10 | 92.50 | 83.10 | 90.77 | 75.00 | 78.20 | 62.30 | 76.57 | |
| The proposed method | 91.54 | 97.59 | 89.52 | 94.46 | 92.16 | 94.09 | 87.12 | 93.12 | |
| Per-Area (%) | Per-Object (%) | |||||||
|---|---|---|---|---|---|---|---|---|
| Comp | Corr | Quality | F1 | Comp | Corr | Quality | F1 | |
| S1 | 96.54 | 99.28 | 95.87 | 97.89 | 98.25 | 98.61 | 96.90 | 98.43 |
| S2 | 96.09 | 98.34 | 94.56 | 97.20 | 100.00 | 91.43 | 91.43 | 95.52 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hui, Z.; Li, Z.; Cheng, P.; Ziggah, Y.Y.; Fan, J. Building Extraction from Airborne LiDAR Data Based on Multi-Constraints Graph Segmentation. Remote Sens. 2021, 13, 3766. https://doi.org/10.3390/rs13183766
Hui Z, Li Z, Cheng P, Ziggah YY, Fan J. Building Extraction from Airborne LiDAR Data Based on Multi-Constraints Graph Segmentation. Remote Sensing. 2021; 13(18):3766. https://doi.org/10.3390/rs13183766
Chicago/Turabian StyleHui, Zhenyang, Zhuoxuan Li, Penggen Cheng, Yao Yevenyo Ziggah, and JunLin Fan. 2021. "Building Extraction from Airborne LiDAR Data Based on Multi-Constraints Graph Segmentation" Remote Sensing 13, no. 18: 3766. https://doi.org/10.3390/rs13183766