
Effect of Lunar Complex Illumination on In Situ Measurements Obtained Using Visible and Near-Infrared Imaging Spectrometer of Chang’E-4


Abstract
:1. Introduction
2. Data and Methods
2.1. Chang’E-4 Spectral Data and Preprocessing
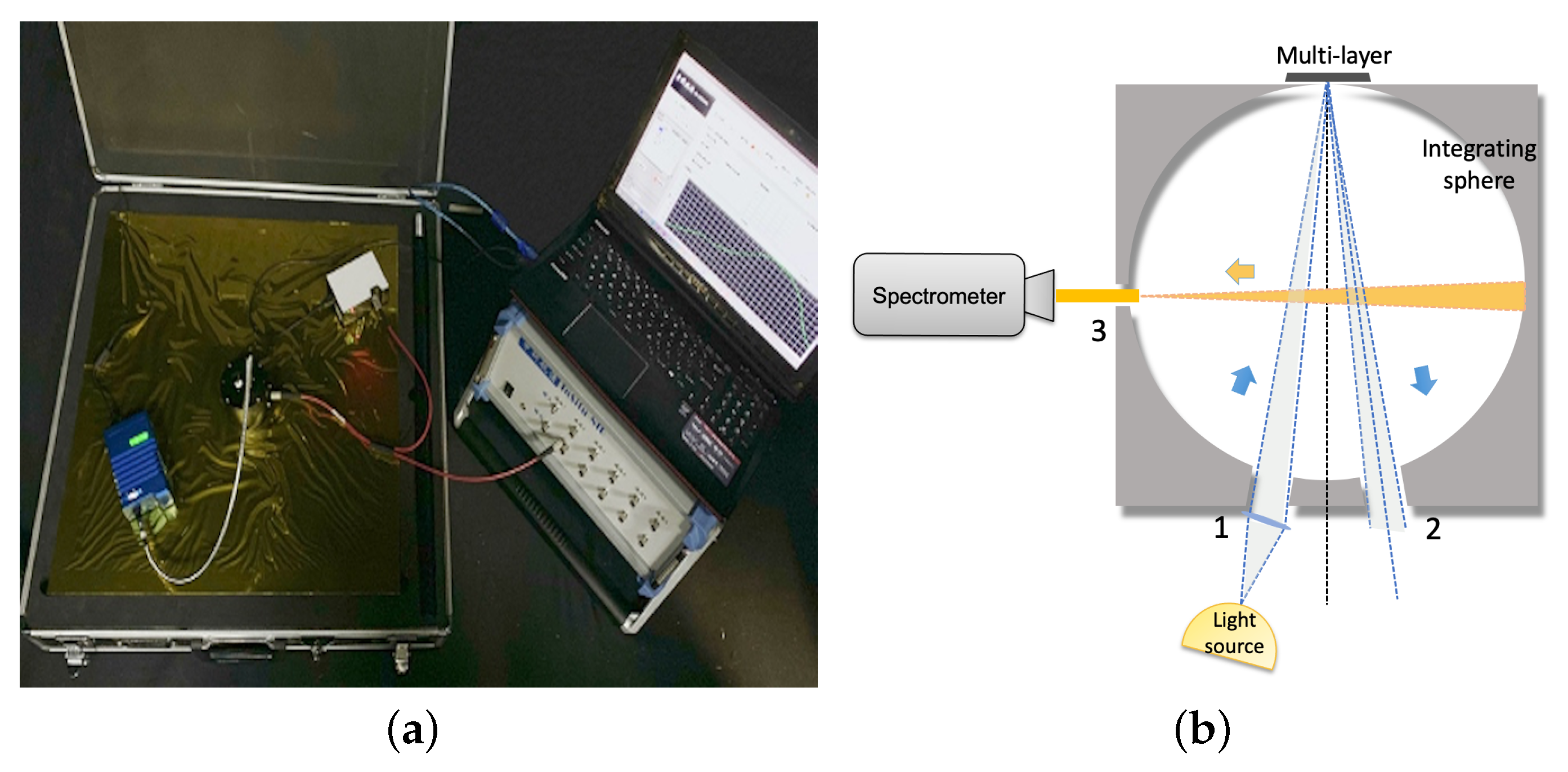
2.2. Laboratory Testing of F46 Film Spectrum
3. Results and Discussion
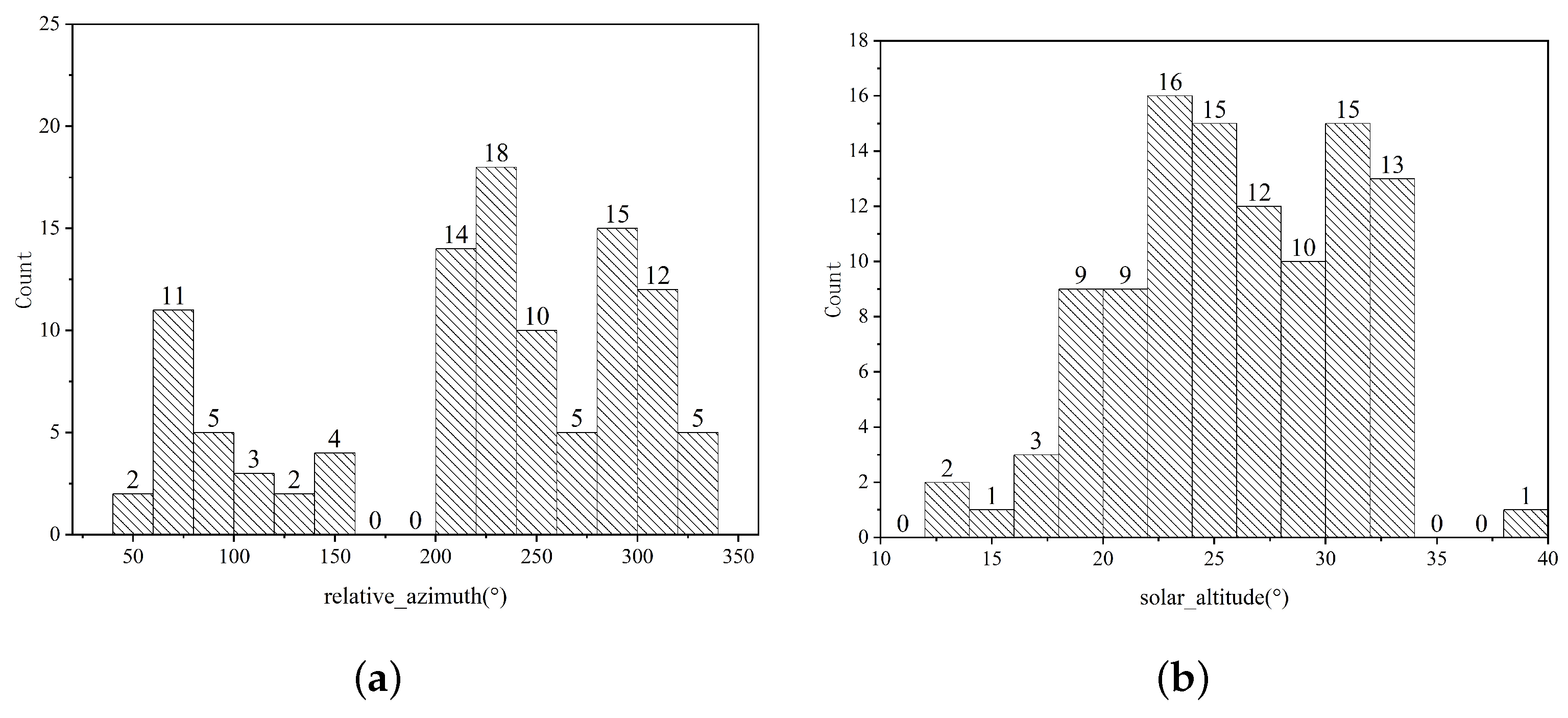
3.1. Statistics of Illumination and Observation Geometry
3.2. Shadow Effect
3.3. MLI Effect
4. Conclusions
- (1)
- Six sets of data pertaining to the VIS/NIR images obtained in the first 24 lunar days involved large shadows caused by the rover occlusion. The shadow correction significantly improved the reflectance of the affected images and influenced the interpretation of the FeO composition. We analyzed the data from statistical and geometric perspectives and concluded that the observation area is more likely to be influenced by the rover occlusion when the relative azimuth angle ranges from 300∼320;
- (2)
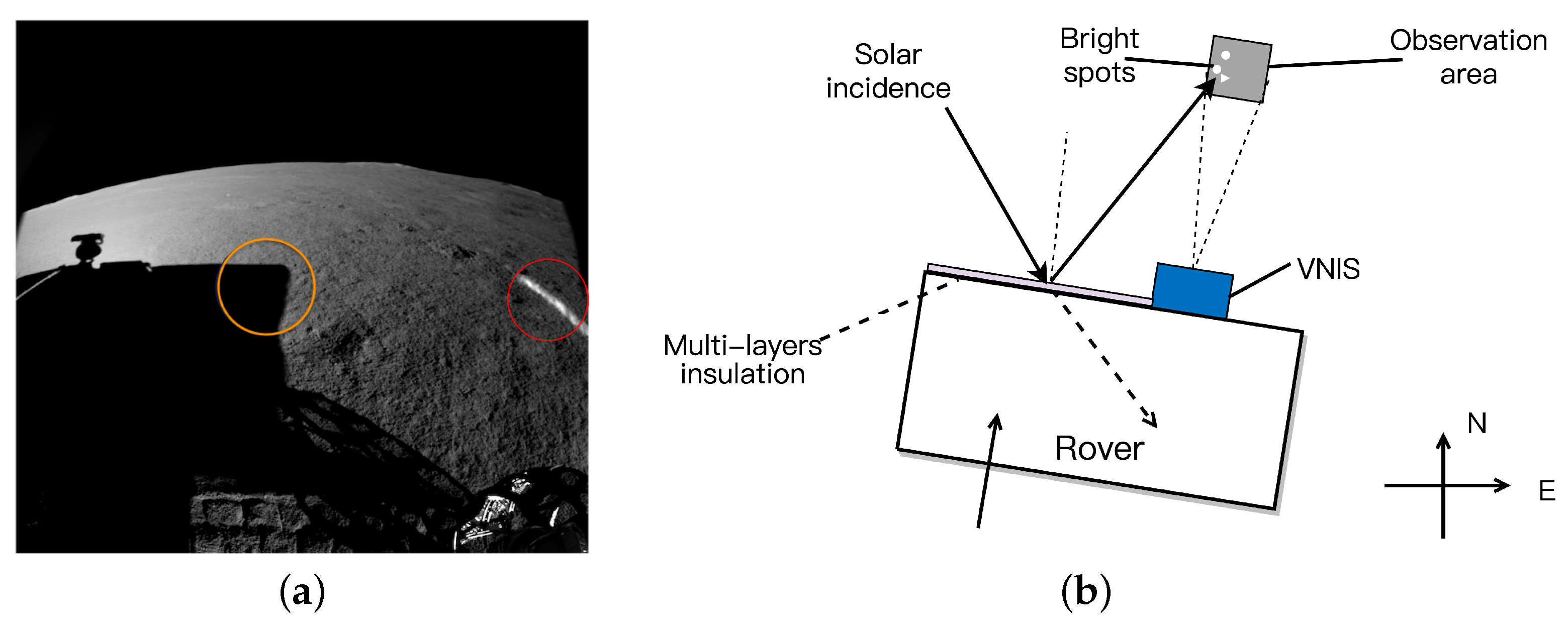
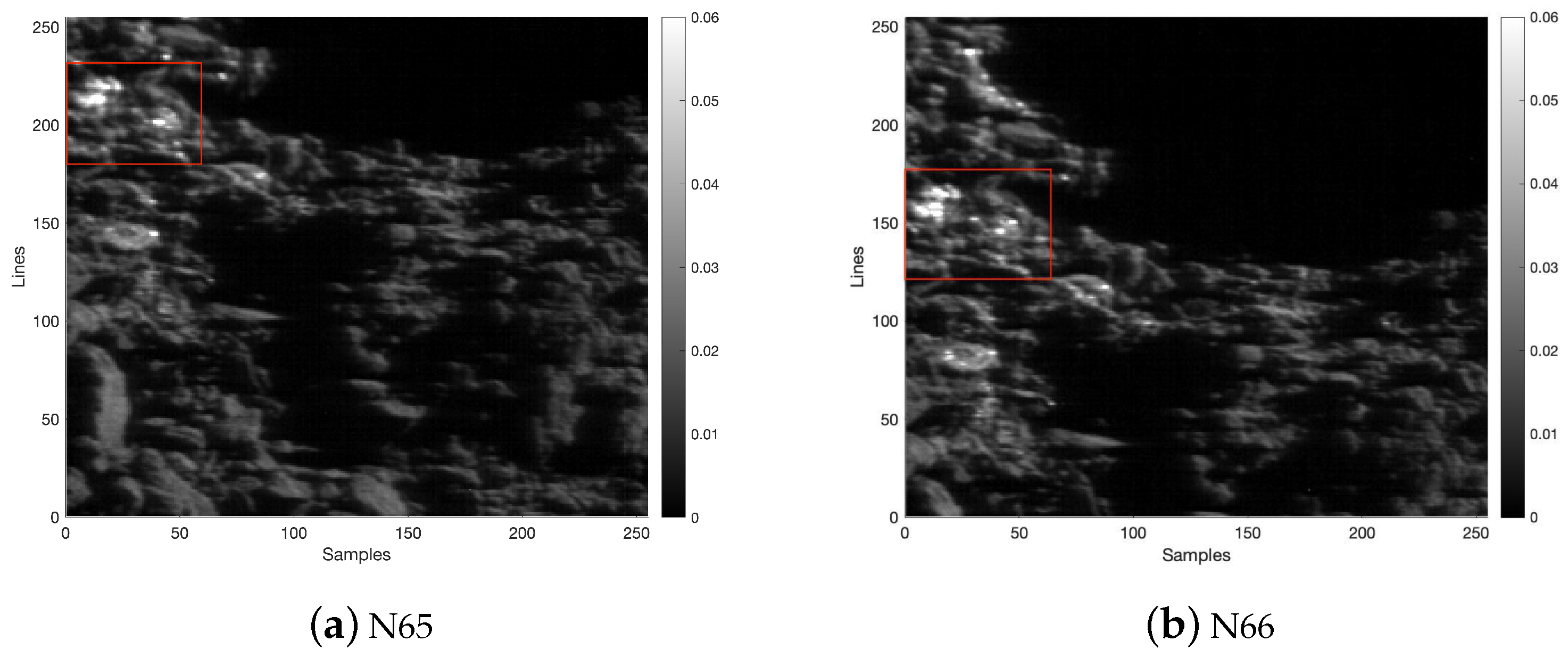
- Five sets of data exhibited bright spots that were significantly different from the normal areas. We proposed an analytical method that involved the comprehensive consideration of three aspects to determine the potential influence of the stray light from the specular reflections of the MLI. The results indicated that the five sets of data were likely not affected by the specular reflection of the MLI. However, diffuse reflection of MLI, specular reflection of MLI that entered the detector directly, and stray lights from rover wheels might also affect the spectral images, the influence of these portions needed further analysis in the future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AOTF | Acousto-Optic Tunable Filter |
| CE | Chang’E |
| CMOS | Complementary Metal-Oxide-Semiconductor |
| DN | Digital Number |
| GRAS | Ground Research and Application System |
| MLI | Multi-Layer Insulation |
| RADF | Reflectance Factor |
| SWIR | Short-Wave Infrared |
| TCAM | Terrain Camera |
| VNIS | Visible and Near-Infrared Imaging Spectrometer |
| VIS/NIR | Visible and Near-Infrared |
References
- Li, C.; Liu, J.; Ren, X.; Zuo, W.; Tan, X.; Wen, W.; Li, H.; Mu, L.; Su, Y.; Zhang, H.; et al. The Chang’e 3 mission overview. Space Sci. Rev. 2015, 190, 85–101. [Google Scholar] [CrossRef]
- Li, C.; Liu, D.; Liu, B.; Ren, X.; Liu, J.; He, Z.; Zuo, W.; Zeng, X.; Xu, R.; Tan, X.; et al. Chang’E-4 initial spectroscopic identification of lunar far-side mantle-derived materials. Nature 2019, 569, 378–382. [Google Scholar] [CrossRef]
- Li, C.; Zuo, W.; Wen, W.; Zeng, X.; Gao, X.; Liu, Y.; Fu, Q.; Zhang, Z.; Su, Y.; Ren, X.; et al. Overview of the Chang’e-4 Mission: Opening the Frontier of Scientific Exploration of the Lunar Far Side. Space Sci. Rev. 2021, 217, 1–32. [Google Scholar] [CrossRef]
- Ling, Z.; Jolliff, B.L.; Wang, A.; Li, C.; Liu, J.; Zhang, J.; Li, B.; Sun, L.; Chen, J.; Xiao, L.; et al. Correlated compositional and mineralogical investigations at the Chang’e-3 landing site. Nat. Commun. 2015, 6, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Ma, P.; Yang, Y.; Zhu, M.H.; Jiang, T.; Lucey, P.G.; Sun, L.; Zhang, H.; Li, C.; Xu, R.; et al. Mineral abundances inferred from in situ reflectance measurements of Chang’E-4 landing site in South Pole-Aitken basin. Geophys. Res. Lett. 2019, 46, 9439–9447. [Google Scholar] [CrossRef]
- Gou, S.; Di, K.; Yue, Z.; Liu, Z.; He, Z.; Xu, R.; Lin, H.; Liu, B.; Peng, M.; Wan, W.; et al. Lunar deep materials observed by Chang’e-4 rover. Earth Planet Sci. Lett. 2019, 528, 115829. [Google Scholar] [CrossRef]
- Lin, H.; He, Z.; Yang, W.; Lin, Y.; Xu, R.; Zhang, C.; Zhu, M.H.; Chang, R.; Zhang, J.; Li, C.; et al. Olivine-norite rock detected by the lunar rover Yutu-2 likely crystallized from the SPA-impact melt pool. Natl. Sci. Rev. 2020, 7, 913–920. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Xiao, Z.; Xiao, L.; Horgan, B.; Hu, X.; Lucey, P.; Xiao, X.; Zhao, S.; Qian, Y.; Zhang, H.; et al. Diverse rock types detected in the lunar South Pole–Aitken Basin by the Chang’E-4 lunar mission. Geology 2020, 48, 723–727. [Google Scholar] [CrossRef]
- Tao, D.; Jia, G.; Zhao, H. End-to-end simulation model of rover-based hyperspectral remote-sensing systems: Application to VNIS. Int. J. Remote Sens. 2014, 35, 7279–7302. [Google Scholar] [CrossRef]
- Hu, S.; Lin, Y.T.; Liu, B.; Yang, W.; He, Z.P.; Xing, W.F. Reflectance calibration and shadow effect of VNIS spectra acquired by the Yutu rover. Res. Astron. Astrophys. 2015, 15, 1587. [Google Scholar] [CrossRef]
- Lin, H.; Lin, Y.; Yang, W.; He, Z.; Hu, S.; Wei, Y.; Xu, R.; Zhang, J.; Liu, X.; Yang, J.; et al. New insight into lunar regolith-forming processes by the lunar rover Yutu-2. Geophys. Res. Lett. 2020, 47, e2020GL087949. [Google Scholar] [CrossRef]
- Hapke, B. Theory of Reflectance and Emittance Spectroscopy; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- He, Z.; Xu, R.; Li, C.; Lv, G.; Yuan, L.; Wang, B.; Shu, R.; Wang, J. Visible and near-infrared imaging spectrometer (VNIS) for in-situ lunar surface measurements. In Sensors, Systems, and Next-Generation Satellites XIX; International Society for Optics and Photonics: Toulouse, France, 2015; Volume 9639, p. 96391S. [Google Scholar]
- Yang, Y.; Lin, H.; Liu, Y.; Lin, Y.; Wei, Y.; Hu, S.; Yang, W.; Xu, R.; He, Z.; Zou, Y. The effects of viewing geometry on the spectral analysis of lunar regolith as inferred by in situ spectrophotometric measurements of Chang’E-4. Geophys. Res. Lett. 2020, 47, e2020GL087080. [Google Scholar] [CrossRef]
- Li, C.; Xu, R.; Lv, G.; Yuan, L.; He, Z.; Wang, J. Detection and calibration characteristics of the visible and near-infrared imaging spectrometer in the Chang’e-4. Rev. Sci. Instrum. 2019, 90, 103106. [Google Scholar] [CrossRef] [Green Version]
- He, Z.; Li, C.; Xu, R.; Lv, G.; Yuan, L.; Wang, J. Spectrometers based on acousto-optic tunable filters for in-situ lunar surface measurement. J. Appl. Remote Sens. 2019, 13, 027502. [Google Scholar]
- He, Z.P.; Wang, B.Y.; Lv, G.; Li, C.L.; Yuan, L.Y.; Xu, R.; Liu, B.; Chen, K.; Wang, J.Y. Operating principles and detection characteristics of the Visible and Near-Infrared Imaging Spectrometer in the Chang’e-3. Res. Astron. Astrophys. 2014, 14, 1567. [Google Scholar] [CrossRef]
- Liu, B.; Li, C.L.; Zhang, G.L.; Xu, R.; Liu, J.J.; Ren, X.; Tan, X.; Zhang, X.X.; Zuo, W.; Wen, W.B. Data processing and preliminary results of the Chang’e-3 VIS/NIR Imaging Spectrometer in-situ analysis. Res. Astron. Astrophys. 2014, 14, 1578. [Google Scholar] [CrossRef]
- Gueymard, C.A. The sun’s total and spectral irradiance for solar energy applications and solar radiation models. Sol. Energy 2004, 76, 423–453. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Z.; Cai, W.; Lu, Y. The absolute reflectance and new calibration site of the Moon. Astron. J. 2018, 155, 213. [Google Scholar] [CrossRef]
- Lin, H.; Xu, R.; Yang, W.; Lin, Y.; Wei, Y.; Hu, S.; He, Z.; Qiao, L.; Wan, W. In situ photometric experiment of lunar regolith with visible and near-infrared imaging spectrometer on board the Yutu-2 lunar rover. J. Geophys. Res. Planets 2020, 125, e2019JE006076. [Google Scholar] [CrossRef]
- Liu, B.; Liu, J.Z.; Zhang, G.L.; Ling, Z.C.; Zhang, J.; He, Z.P.; Yang, B.Y.; Zou, Y.L. Reflectance conversion methods for the VIS/NIR imaging spectrometer aboard the Chang’E-3 lunar rover: Based on ground validation experiment data. Res. Astron. Astrophys. 2013, 13, 862. [Google Scholar] [CrossRef]
- Qi, X.; Ling, Z.; Zhang, J.; Chen, J.; Cao, H.; Liu, C.; Qiao, L.; Fu, X.; He, Z.; Xu, R.; et al. Photometric Normalization of Chang’e-4 Visible and Near-Infrared Imaging Spectrometer Datasets: A Combined Study of In-Situ and Laboratory Spectral Measurements. Remote Sens. 2020, 12, 3211. [Google Scholar] [CrossRef]
- Lucey, P.G.; Blewett, D.T.; Jolliff, B.L. Lunar iron and titanium abundance algorithms based on final processing of Clementine ultraviolet-visible images. J. Geophys. Res. Planets 2000, 105, 20297–20305. [Google Scholar] [CrossRef]
- Lin, H.; Lin, Y.; Wei, Y.; Xu, R.; Liu, Y.; Yang, Y.; Hu, S.; Yang, W.; He, Z. Estimation of Noise in the In Situ Hyperspectral Data Acquired by Chang’E-4 and Its Effects on Spectral Analysis of Regolith. Remote Sens. 2020, 12, 1603. [Google Scholar] [CrossRef]
- De Boor, C.; De Boor, C. A Practical Guide to Splines; Springer: New York, NY, USA, 1978; Volume 27. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data ID | Solar Altitude () | Solar Azimuth Angle () | Emission Azimuth Angle () | Relative Azimuth Angle () |
|---|---|---|---|---|
| N30 | 28.63 | 59.26 | 106.42 | 312.84 |
| N39 | 12.25 | 78.84 | 116.83 | 320.01 |
| N56 | 22.55 | 63.14 | 114.90 | 308.23 |
| N57 | 24.55 | 60.36 | 111.47 | 308.90 |
| N101 | 24.18 | 62.53 | 6.17 | 56.35 |
| N140 | 21.00 | 64.94 | 118.14 | 306.80 |
| Data ID | Solar Altitude () | Solar Azimuth Angle () | Emission Azimuth Angle () | Relative Azimuth Angle () |
|---|---|---|---|---|
| N65 | 19.93 | 293.72 | 57.74 | 235.97 |
| N66 | 19.00 | 292.55 | 57.73 | 234.82 |
| N130 | 21.68 | 66.36 | 356.00 | 70.35 |
| N131 | 27.90 | 57.64 | 356.28 | 61.36 |
| N132 | 28.97 | 55.95 | 356.31 | 59.64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Wang, M.; Lin, H.; Wang, R.; Feng, Q.; Xu, X. Effect of Lunar Complex Illumination on In Situ Measurements Obtained Using Visible and Near-Infrared Imaging Spectrometer of Chang’E-4. Remote Sens. 2021, 13, 2359. https://doi.org/10.3390/rs13122359
Xu J, Wang M, Lin H, Wang R, Feng Q, Xu X. Effect of Lunar Complex Illumination on In Situ Measurements Obtained Using Visible and Near-Infrared Imaging Spectrometer of Chang’E-4. Remote Sensing. 2021; 13(12):2359. https://doi.org/10.3390/rs13122359
Chicago/Turabian StyleXu, Jiafei, Meizhu Wang, Honglei Lin, Rong Wang, Qi Feng, and Xuesen Xu. 2021. "Effect of Lunar Complex Illumination on In Situ Measurements Obtained Using Visible and Near-Infrared Imaging Spectrometer of Chang’E-4" Remote Sensing 13, no. 12: 2359. https://doi.org/10.3390/rs13122359